基于风场降阶模型空飘气球航迹预测仿真
2023-10-17张家铭李小建
张家铭,李小建,倪 勇
(中国电子科技集团公司第三十八研究所 浮空平台研发中心,合肥 230088)
空飘气球依靠其球体内部充装的氦气等轻质气体产生浮力,上升至设计高度,悬浮驻空并随着风向自由飘动,是一种无动力浮空飞行器。美国Google公司空飘气球球体由柔性薄膜材料制成,内充氦气,根据不同任务需求在球体下方挂载不同任务载荷。
空飘气球的飞行区域多为临近空间,这是一种介于航空器与航天器之间的大气空间,其中空气密度较为稀薄,又具有较强的电离辐射,尚未被人类完全开发利用,具有独特的资源优势[1]。临近空间底部平流层的气流相对稳定,在高度为17~22 km的平流层空间内存在东西风切换层,上层为东风,下层为西风,南北方向风速较小,这一高度层全年的平均风速低于10 m·s-1,通常称为“准零风层”[2]。
由于空飘气球具有随风飘动的特点,可通过抛置压舱物、充放副气囊空气调节系统重量等方式,调整空飘气球的飞行高度,使其飘浮在准零风层,沿着预定的轨迹运动。近年来,利用风场环境研究空飘气球航迹在国内外均取得了一定进展。国外,Google公司提出了“Project Loon”项目,通过寻找准零风层,空飘气球能够实现50 km半径范围内的区域驻留。国内,国防科技大学李魁等[3]利用本征正交分解法(Proper Orthogonal Decomposition, POD)对平流层风场模型进行降阶处理,在此基础上,采用Fourier级数和BP神经网络算法进行风场的预测;西北工业大学常晓飞等[4]通过调整飞行高度实现浮空气球的东西方向控制,通过系留缆绳拖动实现其南北方向控制。
综上所述,空飘气球通常利用准零风层实现一定范围内的区域驻留,对平流层风场环境的研究是实现空飘气球轨迹控制和区域驻留的前提。本文通过非线性模型降阶方法对风场数据进行处理,仿真模拟了空飘气球在风场中的运动,并将计算过程集成在MATLAB图形用户界面中,动态展示了不同高度空飘气球的运动轨迹曲线。通过对运动轨迹的预测,可对气球飞行任务规划提供支撑。
1 风场降阶模型
风场是一个复杂的物理系统,具有较强的随机性和非线性。用于对平流层风场模型进行降阶处理的POD方法为线性模型降阶方法,当模型具有较强的非线性特征时,模拟的精度较低。本文采用基于状态空间辨识的模型降阶方法(Reduced-Order Model, ROM)[5]来处理风场数据,其中模型降阶过程分为线性系统辨识和非线性参数优化两部分。在建立状态空间模型后,采用Wiener模型中的神经网络算法对风场进行预测,该方法具有结构简单、辨识效率高、精度高等优点,且能够应用于多输入/多输出系统(Multiple-Input/Multiple-Output, MIMO)。
状态空间法多用于自动控制系统,包含非线性项的状态空间模型形式如下:
xa(k+1)=Aaxa(k)+Bau(k)+EaΦ(xa(k))+GAΦ(u(k))
y(k)=Caxa(k)+Dau(k)+FaΦ(xa(k))+HaΦ(u(k))
(1)
式中:xa∈Rn是状态向量;u∈Rn是输入向量;ya是∈Rn是输出向量,n、m、l分别是状态变量、输入变量、输出变量的维数;Φ(xa(k))和Φ(ua(k))分别是状态变量和输入变量的非线性函数,本文选用神经网络辨识过程中较为常见的双曲正切函数tanh(·)来表征该非线性函数;线性部分系数(Aa,Ba,Ca,Da)和非线性部分系数(Ea,Fa,Ga,Ha)是待辨识的变量,可通过Levenberg-Marquardt算法优化得到。
用于预测风场的Wiener模型结构图如图1所示,由状态空间方程串联单层神经网络,并基于L-M优化方法来递归逼近非线性风场模型。其中,zi,j(k)是线性ROM的输出向量,yi(k)是非线性ROM的输出向量。

图1 Wiener模型结构图
采用上述基于状态空间辨识的风场模型降阶方法,对某一经纬度20~22 km南北方向风场和东西方向风场3天内的数据进行系统辨识,并分别从时间和空间两个维度对辨识结果进行验证。20 km高度实际风场数据和线性/非线性ROM输出数据对比如图2所示,不同高度实际风场数据和线性/非线性ROM输出数据对比如图3所示。由图可知,非线性ROM的输出结果与实际风场数据的吻合度较高。

图2 20 km高度实际风场数据和线性/非线性ROM输出数据对比

图3 不同高度实际风场数据和线性/非线性ROM输出数据对比
为了将线性与非线性方法辨识能力进行对比,引入风场数据与ROM结果的方差比(Variance Accounted For, VAF),其定义式如下:
(2)
若两种信号相同,则VAF值为100%;两种信号的差异性越大,VAF值越低。线性与非线性ROM的VAF值如表1所示。由表可知,非线性ROM能够显著提高辨识精度,这是因为风场数据具有较强的非线性特征。
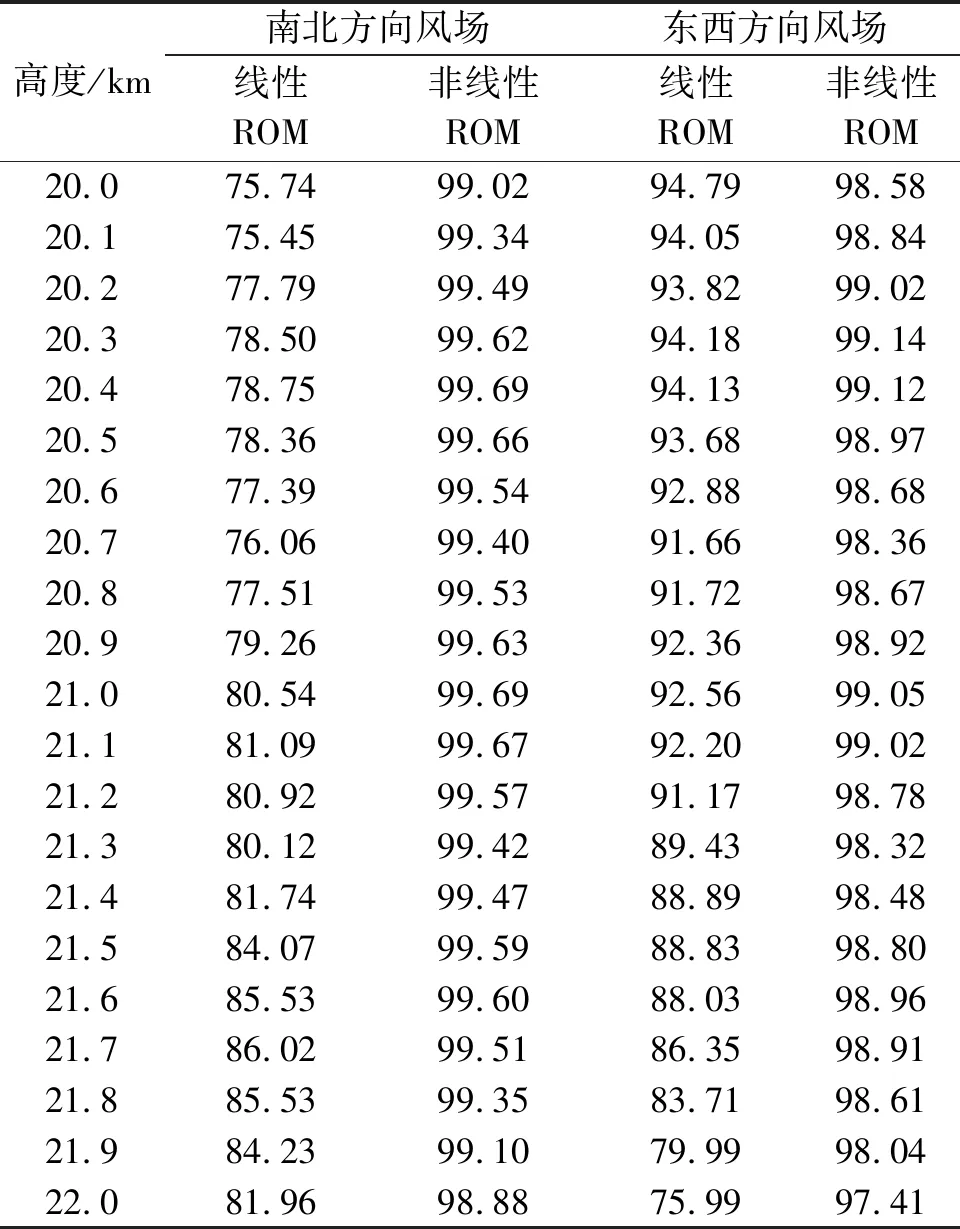
表1 线性与非线性方法的VAF值
通过对实际风场数据的辨识,得到南北方向风场非线性降阶模型的最优阶数r=11,东西方向风场非线性降阶模型的最优阶数r=6,南北方向风场的预测精度更高。以更新后的时间序列作为输入向量,以高度层数作为输入/输出向量的维数,对3天后南北方向风场和东西方向风场随时间的变化规律进行预测。对1小时后实际风场与预测风场在不同高度的分布情况进行对比,非线性ROM对不同高度风场的预测如图4所示,由图表明该非线性ROM具有较高的预测精度。
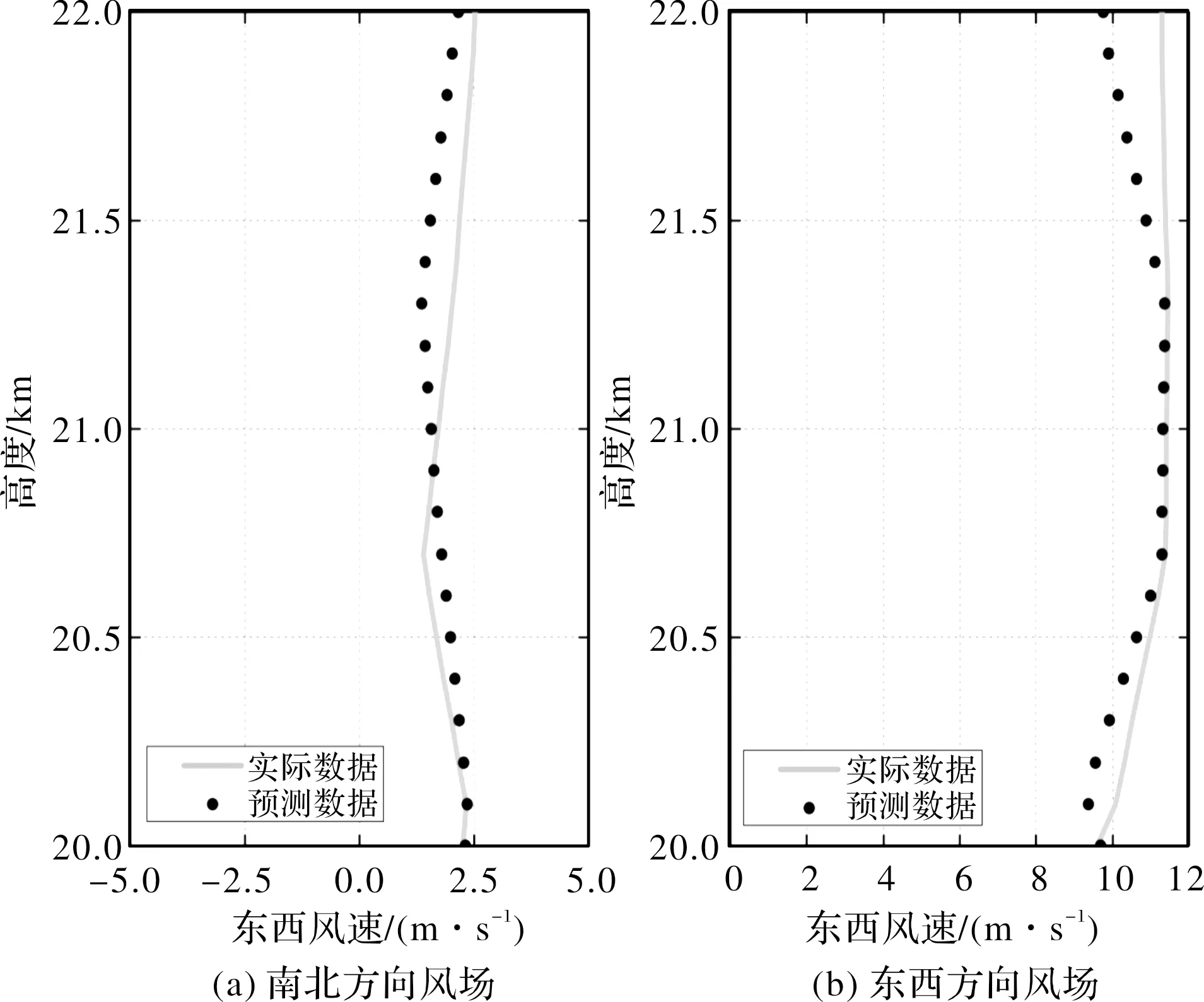
图4 非线性ROM对不同高度风场的预测
2 动力学模型
基于前述建立的风场降阶模型,18~23 km高度范围内某区域某时刻的三维风场示意图如图5所示,图中风层的高度间隔为1 km,共有6层。在每一风层上,均有矢量场来表示该层各点处合成风速的速度大小和方向,18 km处的二维风场示意图如图6所示。

图5 三维风场示意图
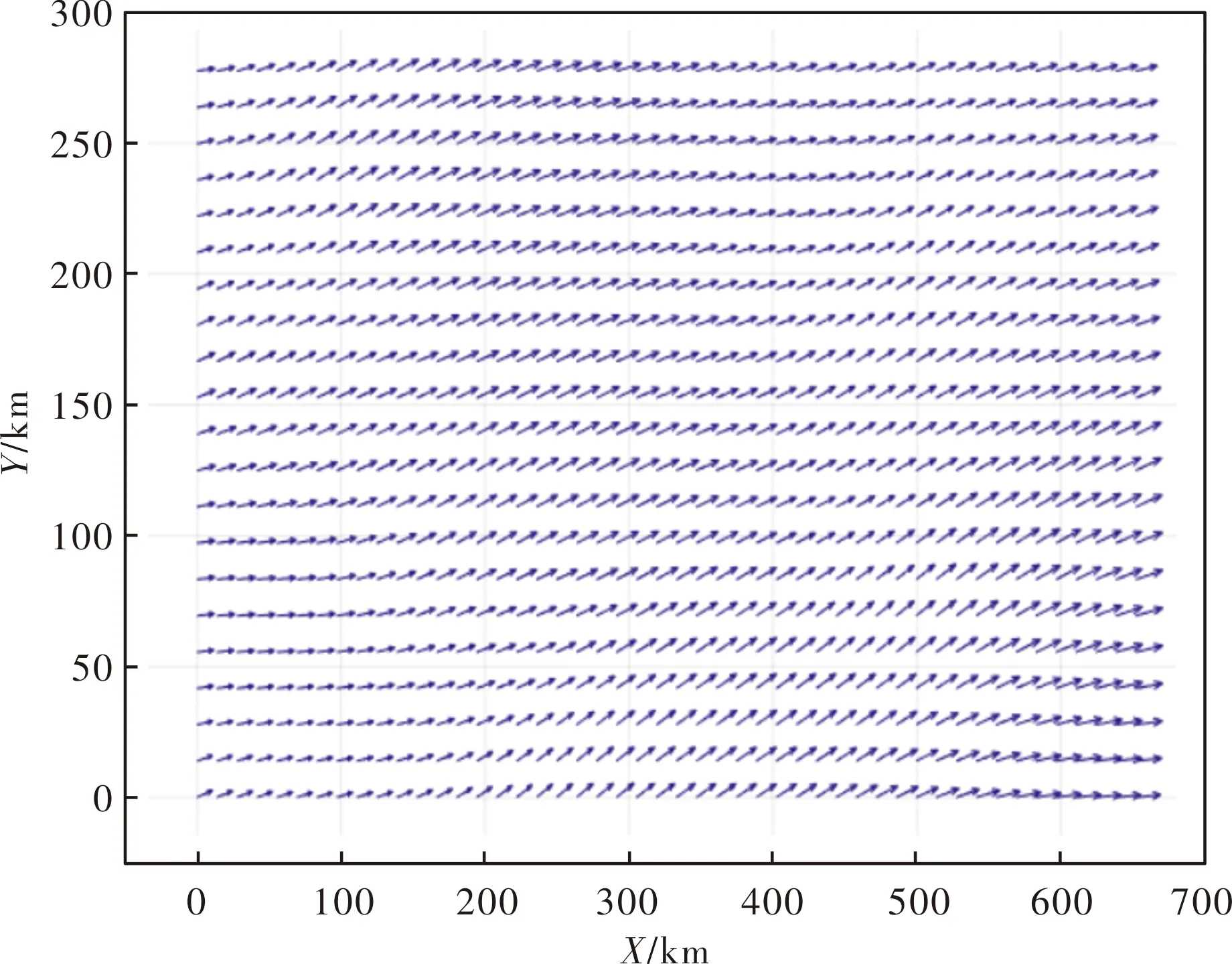
图6 二维风场
由于空飘气球具有随风飘动的特性,且尺寸远小于风场,理想情况下可将其看作质点运动,飘飞到某一点的速度等于当地风速。空飘气球在风场中运动的俯视图如图7所示。在空飘气球的驻空阶段,其高度不再上升,竖直方向上受力平衡;水平方向上空速为零,球体运动速度等于风速,建立气球的动力学方程如下:
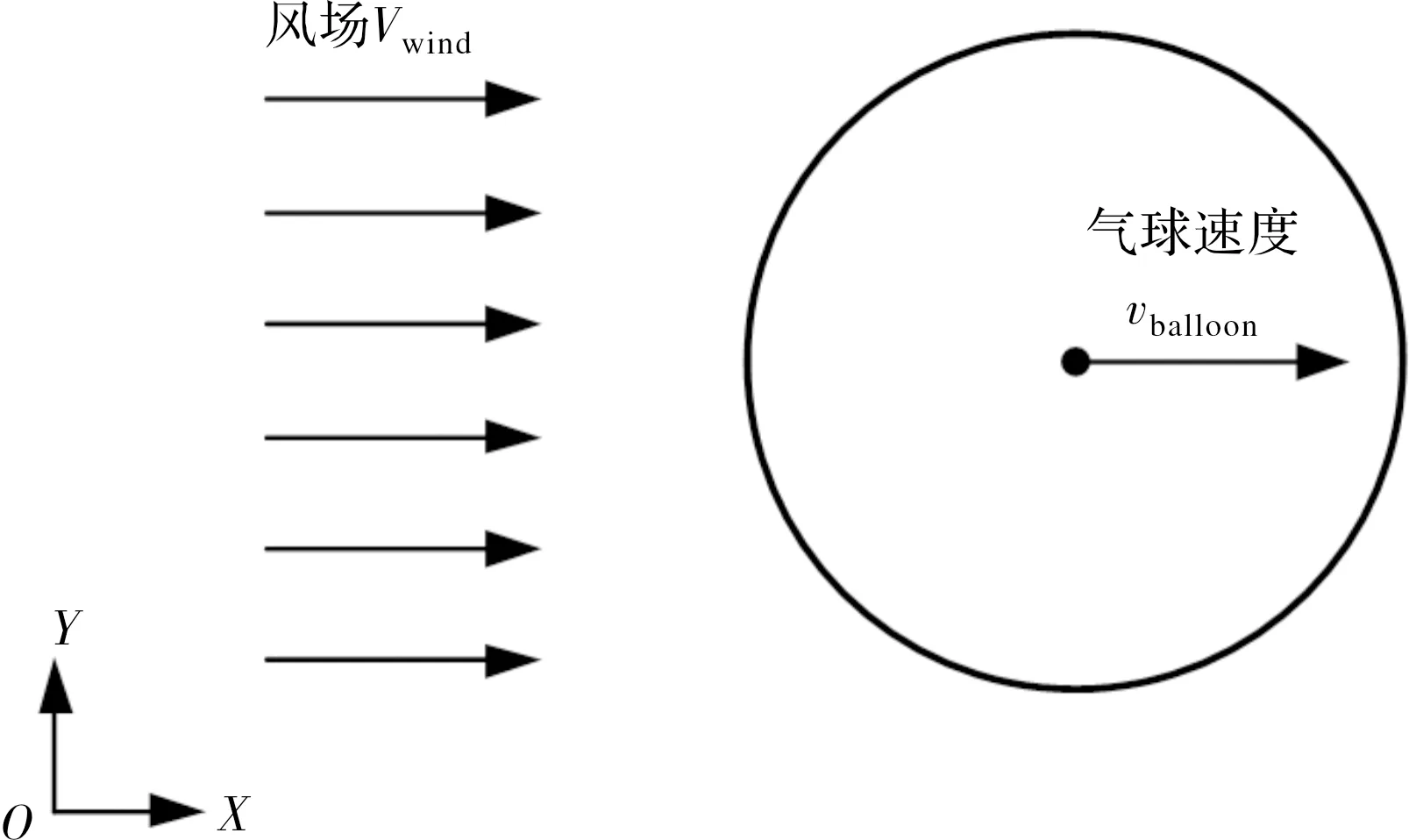
图7 空飘气球在风场中运动的俯视图
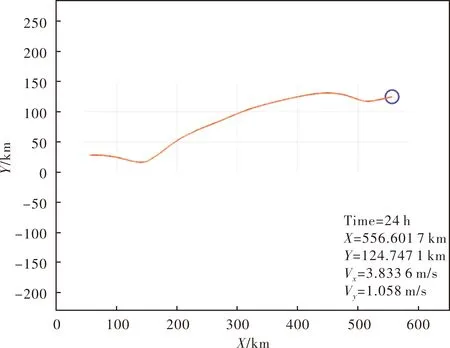
图8 空飘气球在20 km风层运动的二维轨迹曲线
(3)
式中:B为浮力;Gtotal为系统总重力;vballoom为气球运动速度;vwind为风速。
在已知风场的情况下,将空飘气球当前所在位置的风速代入动力学方程,可求解并绘制其运动轨迹曲线。空飘气球在20 km风层运动的二维轨迹曲线如图2所示,输入仿真的初始位置经纬度坐标,仿真初始时刻设置为上午8:00,仿真时间为24 h。在MATLAB中求解运动轨迹,右下角标注空飘气球当前的时间、位置和速度信息并实时更新,最后保存为动态图像方便后续查阅。
3 仿真与结果分析
MATLAB功能强大,其创建的图形用户界面(Graphical User Interface, GUI)能够作为用户和计算机之间交流的工具,通过GUI设计的软件界面应具有良好的人机交互性[6]。
将上述风场降阶模型和空飘气球动力学模型进行模块化封装,嵌入到GUI的界面设计中,初始界面如图9所示。用户可自定义输入仿真高度、初始经纬度、初始时刻、仿真时长等参数,软件可对空飘气球当前位置的风场数据实时处理,并在图像界面动态显示空飘气球的运动轨迹。
图9 初始界面
图10所示是软件的仿真结果,图中虚线框为试验场指定空域边界。勾选风场复选框以实时显示风场矢量图。该区域风向主要为西南风,18 km海拔高度处风速较大,在仿真时长仅为10 h时空飘气球已经飞出空域边界。在20 km和21 km海拔高度处,仿真时长为24 h时,空飘气球从空域西南角随风向东北方向飘动。改变仿真的初始经纬度,在23 km海拔高度大气环流的影响下,空飘气球能够实现一定范围内的区域驻留。通过对不同高度层处运动轨迹曲线的预测,操作人员能够在空飘气球的实际飞行过程中提出控制决策,调整空飘气球至特定的飞行高度,规划合理的航迹。
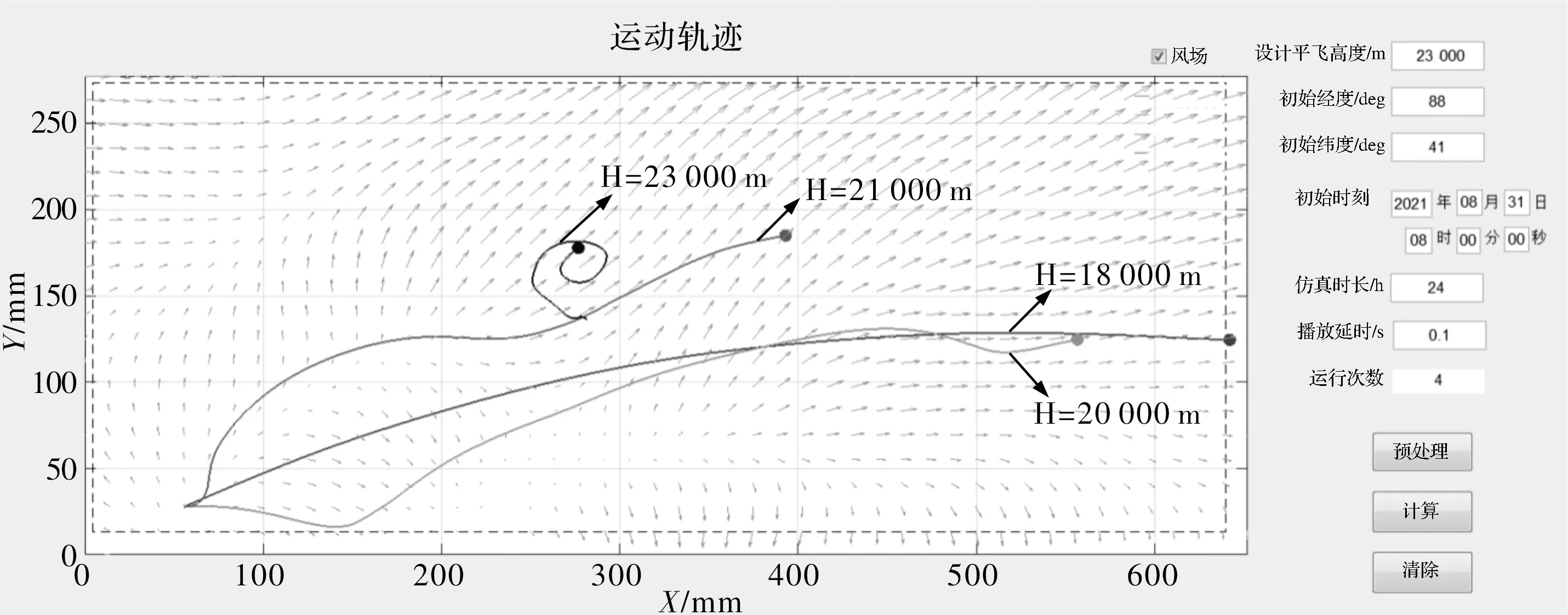
图10 仿真结果
4 结论
本文采用非线性模型降阶方法对风场数据进行处理,仿真模拟了空飘气球在指定风层的运动轨迹曲线,并将结果集成到MALTAB GUI中,从而快捷地改变输入参数,使仿真过程更为简洁直观,便于在空飘气球外场试验过程中的实际应用。仿真结果表明,通过调整高度至合适的风层,空飘气球能够实现小范围的长时区域驻留。值得注意的是,由于风场降阶模型训练数据的数据量较少,且仅考虑时间作为状态空间模型的输入,导致非线性降阶模型不够精确,后续应识别出更多的气象要素条件作为模型输入,使模型预测的精准度更高。
