基于聚类变异PSO优化的VSCMGs模糊平滑切换算法
2023-10-13马浩哲
杨 楠,郁 丰,马浩哲,赵 航
(1.南京航空航天大学 航天学院,南京 210016;2.空间光电探测与感知工业和信息化部重点实验室(南京航空航天大学),南京 210016)
敏捷遥感卫星[1-2]对姿态控制的要求十分苛刻,要求卫星能够在短时间内完成大角度姿态机动并快速稳定。作为一种大力矩输出执行机构,控制力矩陀螺(control moment gyro,CMG)广泛应用于遥感卫星,如美国的WorldView系列卫星[3]和法国的Pleiades系列卫星[4]。但是CMG存在固有的奇异和力矩分辨率较低的问题[5]。可采用混合执行机构[6]的方法来弥补这个问题,但会增大卫星的质量和体积,不利于卫星微型化。而变速控制力矩陀螺(variable speed control moment gyro,VSCMG)与传统的恒速CMG相比,增加了飞轮的变速自由度,因此VSCMG兼具CMG和飞轮的工作特性。CMG能够输出大力矩,但力矩分辨率低;飞轮能够输出高分辨率力矩,但力矩值小[7-10]。采用VSCMG群作为姿态控制执行机构能够节约星上空间,通过在姿态机动阶段工作在CMG模式输出大力矩保证机动的快速性,在姿态稳定阶段工作在飞轮模式输出精细力矩保证较高的姿态稳定度和指向精度,能够满足敏捷遥感卫星“急转急停”的姿态控制需求,相比于采用传统CMG在机动末端,能够为遥感相机提供更稳定的姿态和更精确的指向。
VSCMG可通过框架的转动和飞轮的转速变化产生力矩,但是由于框架伺服系统固有的惯性和扰动力矩,框架电机无法立刻输出指令转速,并存在一定的稳态误差,因此CMG模式及VSCMG模式下输出的力矩分辨率较低[11]。框架电机在卫星稳态时的转速很低,此时会受到检测精度的限制,并且干扰力矩具有更强烈的非线性[12-13]。对此,许多学者[14-16]设计框架伺服系统控制方法,来抑制干扰力矩产生的不利影响,提高框架转速跟踪精度。但研究都是基于模拟的干扰力矩且转速误差难以完全消除,因此有必要在机动末端逐步将框架锁死,使得VSCMG工作在纯飞轮模式,在更大程度上降低或消除框架转速误差和各项波动干扰的影响,保证机动末端的高精度稳定和指向。
针对姿态机动末端VSCMG的模式切换,国内外学者进行了研究。基于传统加权伪逆操纵律,文献[17]设计了一种基于增益调度的操纵律,将姿态信息引入加权伪逆参数,实现末端的模式切换,但姿态信息仅考虑姿态四元数,没有考虑姿态角速度,因此对卫星进入稳态的判别不精准。文献[18]将姿态四元数与姿态角速度均考虑在内作为模式切换阀值,但该切换缺少过渡过程,在切换的瞬间可能会引起姿态产生抖动,长期下来对VSCMG设备也会造成损伤。文献[12,19]对加权参数进行以分段函数形式设计,分别根据姿态角误差和指令力矩的大小来判断当前姿态机动的状态,并相应调整CMG和飞轮的权重,依赖加权参数进行切换虽然相对平稳,但是切换过程缓慢。通过将指令力矩按一定规则分配给CMG和飞轮再分别求解,文献[20-21]分别设计了一种模式调度操纵律和双模式操纵律,均根据CMG奇异信息进行切换,但没有考虑姿态信息,无法保证末端控制精度。通过将姿态控制过程分段,文献[22]分别设计了大角度姿态机动段和末端高精度指向段的VSCMG操纵律,在机动段末端使得框架角位置锁定在通过优化计算得出的最优位置,保证稳定段VSCMG工作在纯飞轮模式。
以往的研究表明,姿态机动末端VSCMG两种工作模式的切换存在切换过于直接会造成不利影响和追求平稳切换,则过渡过程会较长导致效率降低的矛盾。为了保证VSCMG在姿态机动末端能够以较短的时间由CMG模式平滑过渡到飞轮模式,实现两种模式的快速“软切换”,设计姿态误差参数作为切换指标,制定误差参数切换区域内的过渡规则,将指令力矩实时分配给CMG和飞轮并分别求解,设计一种模糊平滑切换VSCMG操纵律。为了使得姿态机动末端卫星姿态达到姿态稳定度和指向精度要求的时间更短,以该时间为优化指标,采用改进粒子群算法对该操纵律参数寻优,确定最佳的切换区域和切换参数,满足敏捷遥感卫星成像任务的姿态要求。最后对卫星的成像任务进行仿真分析,验证所提出切换算法的可行性和优越性。
1 动力学模型与运动学模型
1.1 动力学模型
在卫星本体系中,动力学方程[23]为
(1)
式中:Text为作用在卫星的合外力矩,ω为卫星相对惯性系的角速度在本体系下的分量,H为卫星本体和执行机构的总角动量,即
H=Isω+Hvscmg
(2)
式中:Is为卫星本体的惯量矩阵,Hvscmg为执行机构即VSCMG群的角动量。
对于由4个VSCMG成的金字塔构型,VSCMG群角动量表达式为
Hvscmg=C[Ω1Ω2Ω3Ω4]T
(3)
(4)
式中:Ω1~Ω4为各陀螺的飞轮转速;Iw为飞轮转动惯量;β为安装倾角;54.735 6°;δ1~δ4为各陀螺的框架角位置;sβ=sinβ;cβ=cosβ、sδi=sinδi;cδi=cosδi,i对应第i个VSCMG。
框架转速和飞轮转速发生改变时,飞轮角动量的方向和大小也相应改变,从而输出VSCMG力矩,其表达式为
(5)
(6)

1.2 转速误差模型
VSCMG的扰动力矩会随其工况的变化产生波动,而框架转速会随着扰动产生同频波动,且波动量与扰动幅值正相关[14]。框架转速的误差和波动情况也与框架伺服系统的控制效果息息相关,本文结合文献[14],采用终端滑模策略进行框架转速控制,由控制结果可得,在0.005 N·m的2 Hz正弦低频干扰下,转速波动量最大为指令转速的10%;在0.005 N·m的100 Hz正弦高频干扰下,转速波动量最大为指令转速的3%。以上述工况下的转速误差进行模拟,建立在实际应用中简化的VSCMG框架转速误差模型见式(7):
(7)

1.3 运动学模型
采用四元数q表示卫星姿态,卫星的姿态运动学方程[23]为:
(8)
(9)
式中q为卫星相对惯性系的姿态四元数。
2 模糊平滑切换策略


图1 切换函数
将切换区域的误差以一次函数映射到0~9,将力矩以一定比例分配给CMG和飞轮实现模式切换,采用式(9)所示的S型函数作为切换函数。则误差域内CMG和飞轮的力矩占比可由式(10)、(11)得到,相当于将误差域进行模糊化处理,通过隶属函数映射得到误差大模糊子集和误差小模糊子集的隶属度,分别对应CMG力矩和飞轮力矩的占比。分配给飞轮和CMG的力矩见式(12)、(13)。
(10)
Pb(x)=1-Pa(x)
(11)
Ta=Pa(x)Tc
(12)
Tb=Pb(x)Tc
(13)
式中:Ta为分配给CMG的指令力矩,Tb为分配给飞轮的指令力矩,Tc为PD控制器生成的指令力矩。
采用式(14)所示的广义奇异鲁棒操纵律引入力矩误差来逃离机动过程中可能遭遇的CMG奇异时,可通过飞轮来补偿该部分的误差力矩,因此飞轮的指令力矩通常是由模糊切换策略制定的指令力矩Tb与误差力矩之和。当卫星处于姿态机动阶段时,要求VSCMG尽可能工作在纯CMG模式,因此设定阀值D0=0.1,当奇异值Ds>D0时,各飞轮保持原速运转;当奇异值时Ds≤D0,以及卫星处于切换过渡阶段和姿态稳定工作阶段时,各飞轮通过式(15)输出力矩。
(14)
(15)

综上,模糊平滑切换操纵律见表1。

表1 模糊平滑切换操纵律
3 基于聚类变异的粒子群算法设计
标准粒子群算法(particle swarm optimization,PSO)的速度和位置更新公式[25]为:
vij(t+1)=wvij(t)+c1r1(t)[pij(t)-xij(t)]+
c2r2(t)[pgj(t)-xij(t)]
(16)
xij(t+1)=xij(t)+vij(t+1)
(17)
式中:v为粒子速度,x为粒子位置,w为惯性权重,c1、c2为学习因子,r1、r2为0~1随机数,pij为第i个粒子在当前代的最优位置,pgj为当前代的群体最优位置,t为当前迭代次数。
标准PSO存在收敛精度低,易陷入局部最优的问题[25-26]。为了提高算法的收敛速度及精度,可对学习因子进行动态调整[25],见式(18)。并对最大速度进行动态限制[25],见式(19),使得粒子最大速度随迭代次数增加而降低,保证迭代接近尾声时精细搜索。
(18)
(19)
式中:c1max、c1min、c2max、c2min为c1、c2的最大值和最小值,r为0~1随机数,T为最大迭代次数。
除了对速度更新参数进行优化,还可对粒子位置进行不同程度的变异搜索。但传统的方法均是对全局粒子位置采取不同方式的变异,这种变异粒子布满全局的策略使得计算量较大,降低了寻优的效率。
因此,合理选取变异粒子位置和变异方式是减少计算量,保证寻优精度,并提高搜索效率的关键。为了平衡变异粒子位置的选择既能够在全局粒子位置较为分散时尽可能纵观照顾全局,也能够在全局粒子位置较为聚集时避免低效大规模变异,本文结合基于密度的聚类算法[27](density-based spatial clustering of applications with noise,DBSCAN)与非均匀变异算法将全局粒子按照密度分布分类,并按类择优选取变异粒子位置。节约了计算量,并使得算法在每次迭代过程都兼顾了搜索范围内所有聚集小范围内的最优解,在此基础上变异进行二次搜索,提高了算法对每一代群体最优确定的准确度,因此不仅降低了算法对初值的敏感度,还能实现在更广范围内以更高效率找到全局最优点。DBSCAN算法对每次迭代更新的N个粒子以扫描半径为r0,每类中最小包含M个粒子进行分类,从而将具有足够设定密度的粒子所在区域划分为n簇,并对每一簇粒子中适应度最优的粒子位置进行变异。若变异后的粒子适应度降低则替代原粒子的位置,反之则保留原粒子位置。变异方式采用一种非均匀变异[28-29]的方法,将选定粒子进行不同幅度的变异,变异步长随着迭代次数的上升变小,变异范围由限制幅度内的大范围逐步缩小为当前粒子的窄小邻域,确保了最优粒子的精准定位,其表达式见式(20)。同时,在寻优过程中以一定概率随机初始化粒子位置来增强种群的多样性和搜索能力。
(20)
式中:Δ(t,y)=y·(1-r(1-t/T)b),x和x′分别为变异前后的粒子,U和L分别为变异的上下界,b为可设计常数。
对于变异上下界即初始变异范围的确定,以图2所示的函数f(x)为例进行说明。假设初始种群随机初始化位置如图12中x1~x10所示,则当前代群体最优位置为A点,则所有粒子会以一定的速度向A点移动,阻碍了对实际全局最优点B的寻找,造成收敛速度较慢,并且有可能陷入局部最优点A。若以DBSCAN算法进行分类后,可分为{x1,x2}、{x3,x4}、{x5,x6}、{x7,x8,x9}、{x10}5簇,其中{x7,x8,x9}所在的一簇由适应度最优的x8进行小范围邻域的非均匀变异,在迭代初期就能够以一定的概率找到全局最优点B,大大提高了搜索效率并避免陷入局部最优。但若粒子位置分布不巧,也存在陷入局部最优的情况。因此,为了尽可能避免这种情况的发生,将初始的变异范围扩大为粒子定义域内,在提高找到全局最优概率的同时,尽可能覆盖全局粒子空间,避开局部陷阱或缩短陷入其中的时间。
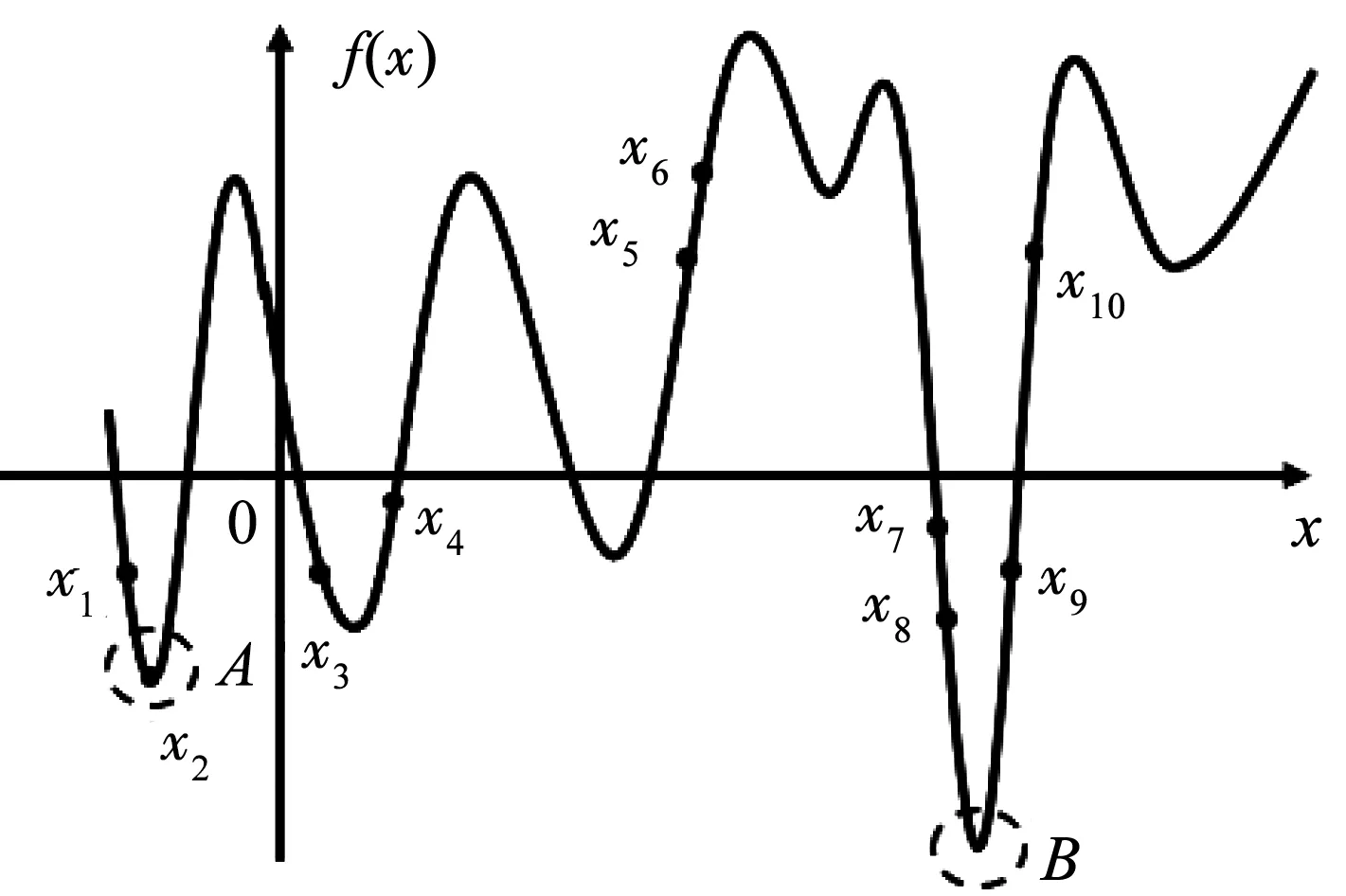
图2 示例函数f(x)
经上述分析可知,改进PSO在粒子群初始位置处于劣态时表现出更强的寻优能力,具有发现潜在最优位置或相对更优位置的潜力,并扩大了粒子搜索范围,加快了收敛速度。
综上,基于聚类变异的PSO步骤如下:
1)初始化种群。
2)以一定概率对粒子个体重新初始化,计算个体和群体最优位置及适应度。
3)根据DBSCAN算法对粒子进行分类,找出每一类粒子中的个体最优粒子,根据式(20)进行非均匀变异;若变异后的粒子适应度优于原粒子适应度,则替代原粒子位置及适应度。
4)根据式(17)~(20)更新速度和位置。
5)判断当前迭代次数是否最大,若不是则返回(2),反之结束迭代。
4 仿真验证
4.1 操纵律参数寻优及改进PSO性能提升分析
对敏捷卫星侧摆45°姿态机动任务进行仿真,设置仿真参数Is=diag(3.2,4.2,4.8) kg·m2,Iw=4.584 7×10-4kg·m2,框架角速度最大为1 rad/s,飞轮角加速度最大为10 rad/s2,初始框架角位置均为δ0=0°,初始飞轮转速均为Ω0=3 000 r/min,则每个VSCMG的初始角动量为h0=IwΩ0=0.144 kg·m2/s。转速误差参数取KH=0.1,fH=100,KL=0.03,fL=2。操纵律参数取λ0=0.01,μ=10,γ0=0.01,α=π/2,[φ1φ2φ3]=[0 π/2 π]。
利用基于聚类变异改进后的PSO寻找最佳切换区域和控制参数,将模糊切换控制律中的e1、e2、a作为优化参数,设置种群数目N=10,迭代次数为T=20,e1、e2、a优化范围分别为0°~5°、5°~10°、0~1。将达到成像要求的时间,即同时达到稳定度要求0.002(°)/s和指向精度0.02°要求的时间作为优化指标,使得敏捷卫星能更快达到成像要求。取c1min=c2min=0.5,c1max=c2max=2.5,e1、e2、a初始速度限制分别为[-0.5,0.5]、[-0.5,0.5]、[-0.1,0.1],惯性系数w=0.8,b=3。以e1进行r0=1、M=1的DBSCAN分类,在每一类的最优点e1、e2、a分别在其定义域内进行变异。
为方便描述,以式(16)~(19)仅对速度更新参数进行调节称为传统PSO,在此基础上进行聚类变异称为改进PSO。以相同初始种群位置采用传统PSO和改进PSO分别进行寻优,收敛曲线见图3。由图3可知,在相同初始种群位置下传统PSO会频繁落入局部最优,因此收敛速度较慢;而改进后的PSO收敛更快且精度更高,在相同的迭代次数中总是表现出比传统PSO更优的适应度。

图3 收敛曲线
由于初始种群位置是随机生成的,另以5组相同初始位置进行仿真。同时,改变总迭代次数对改进后的算法进行仿真验证。分别以迭代次数T=10和T=20进行寻优,仿真结果见图4,图中①~⑤ 5个子图分别对应5组不同的初始位置。定义以式(21)计算的接近程度参数,体现每次迭代结果和最优解的接近程度。结果越小,表明寻优过程中每次迭代结果与最优解更接近,寻优的效率和精度越高。

图4 收敛曲线(多组)
(21)
式中:d为接近程度参数,yi为第i次迭代的最优解,ybest为迭代结束时全局最优解,N为最大迭代次数。
由图4可知,2种算法在不同迭代总次数均能在迭代结束时到达全局最优位置。改进PSO在T=10和T=20时均表现出更好的寻优性能。将图4的相关性能指标参数整理至表2。由表2可知,T=10时,改进PSO基本能在第5代就全部到达全局最优附近,而传统PSO最多需要到第9代才完成寻优;T=20时,改进PSO基本能在第6代就全部到达全局最优附近;而传统PSO在12代左右才全部到达全局最优附近。结合以上数据对比分析可知,不论初始位置好坏,改进PSO对粒子聚类变异搜索后高效扩大了寻优范围,在每一代都尽力找到更优解,经迭代能够较早地收敛到全局最优;而传统PSO在初始位置较好的情况下能快速收敛,否则会较早陷入局部最优,且需要多次迭代跳出。

表2 算法对比
同时,改进PSO由于对群体最优的选择更加谨慎,在迭代初期中有较大概率找到更好的群体最优位置。由表2可知,随机的5次仿真结果中,改进PSO的初代全局最优均优于传统PSO,且相同初始位置迭代过程中的接近程度参数均小于传统PSO,表明每次的寻优结果也比传统PSO更加接近于最终最优解。由图4可知,由于优化对象的复杂性、多峰性和初始种群的随机性,改进PSO也会不幸陷进局部最优,但大多是相对更优的局部最优点并且能够通过学习和变异迅速逃离。
综上,改进PSO寻优速度更快,且结果精度更高。最终优化得到的参数取值为e1=1.106 1,e2=7.298 3,a=0.181 2,达到成像要求的时间为21.71 s。
4.2 模糊平滑切换操纵律与现有操纵律性能对比分析
分别采用3种方案进行仿真对比。方案1:文献[18]中提出的以姿态误差阀值进行硬切换结合零运动的操纵律;方案2:文献[19]中提出的以指令力矩大小确定切换时机,结合加权伪逆的操纵律,应用于本文场景时选择切换力矩值为0.3 N·m;方案3:本文提出的经聚类变异粒子群优化的模糊平滑切换操纵律。仿真结果见图5~7。

图5 切换过程中框架角速度仿真结果
图5和图6分别为切换过程中框架角速度变化曲线和机动过程中VSCMG工作模式切换过程中力矩占比的变化曲线。由图5和图6可知,方案1在12 s左右达到切换条件,框架角速度在瞬时间变为零,虽然切换在瞬时就完成,但对框架电机的使用寿命是不友好的。方案2在机动过程中几乎保持2种模式共同工作,在机动末端,从10 s左右开始进行切换,但直到20 s左右才大致切换为纯飞轮模式,整个切换时间为10 s左右。由CMG框架和飞轮工作在低加速度状态共同输出指令力矩,导致末端力矩无法快速达到高精度要求。因此方案2的力矩分配方式无法尽可能发挥CMG和飞轮各自的优点,且切换过程缓慢。而方案3在机动初期主要工作在纯CMG模式来输出大力矩,碰到奇异时飞轮变速补偿一部分误差力矩,迅速逃离奇异后飞轮角加速度重新归零,回到纯CMG模式;在机动末端,框架从10 s左右逐步开始锁死,同时飞轮逐步变速,最终在15 s左右VSCMG平滑切换到纯飞轮模式提供力矩。因此本文提出的基于聚类变异PSO优化的模糊平滑切换操纵律,既能在较短的时间内完成模式切换,也在一定程度上保证了切换的平稳性,确保了末端的高精度力矩输出。

图6 力矩占比仿真结果
图7为3方案卫星的姿态角速度和欧拉角误差变化曲线。由图7可知,3种操纵律均能够完成45°侧摆机动任务。在姿态稳定阶段,方案1、方案2和方案3达到0.002(°)/s姿态稳定度要求的时间分别为25.66、33.07和21.71 s,方案3能够保证卫星更快地进入稳态。方案1、方案2和方案3进入0.02°指向精度要求的时间分别为22.0、29.42和19.21 s,方案3能够保证卫星更迅速准确地指向观测目标。综上可得,方案1达到成像要求的时间为max{25.66,22.0}=25.66 s;方案2达到成像要求的时间为max{33.07,29.42}=33.07 s;方案3达到成像要求的时间缩短为max{21.71,19.21}=21.71 s。

图7 卫星姿态角速度和欧拉角误差仿真结果
综合以上分析,本文提出的基于聚类变异粒子群优化的模糊平滑切换操纵律,在机动末端能够良好地平衡模式切换过程的平稳性和快速性,相比方案1能够舒缓框架电机的压力,相比方案2能够提高模式切换的效率,同时能够有效提高机动末端卫星姿态角速度和姿态欧拉角的收敛速度和精度。
5 结 论
1)提出的VSCMG模糊平滑切换操纵律能够实现姿态机动过程中由CMG模式到飞轮模式的切换,满足了敏捷遥感卫星在快速机动同时快速稳定的姿态控制需求。
2)所设计的基于聚类变异改进PSO相比于传统PSO表现出更好的寻优效果,具有更快的收敛速度和更高的收敛精度。
3)结合所设计的改进PSO来优化模糊平滑切换操纵律参数,仿真结果表明该切换算法相比于现有切换算法,切换效果快速且平稳,并在姿态机动末端更迅速地达到姿态稳定度和指向精度要求,有效提高了敏捷遥感卫星的成像效率。
4)实际卫星在机动过程中存在环境干扰,实际框架电机的转速误差模型参数也不是恒定的,需要通过陀螺仪测速并进行辨识。因此在后续研究中,以装有金字塔构型VSCMGs的气浮仿真平台做硬件实验,能够模拟太空环境并实时测速,与指令转速辨识得到简化误差模型,验证和分析本文提出算法,更具有真实性和实用性。
