考虑正常使用功能的非线性黏滞阻尼惯容系统多指标减震控制
2023-10-12张瑞甫张璐琦陈清军
张瑞甫,张璐琦,潘 超,陈清军
(1.同济大学 土木工程防灾减灾全国重点实验室,上海 200092;2.同济大学 结构防灾减灾工程系,上海 200092;3.烟台大学 土木工程学院,山东 烟台 264005)
20世纪70年代,日本学者Kawamata[1]提出了一种液体质量泵,该装置产生的惯性力与腔体内流体两端的相对加速度成正比,这种装置成为了现代惯容器的萌芽。随后,学者对包含惯容元件、刚度元件和阻尼元件等在内的惯容系统展开了研究[2],说明了惯容系统从惯性、刚度、阻尼等方面对结构的动力特性进行灵活调整的可能性[3]。与经典质量元件的虚拟惯性力不同,惯容元件在惯性和非惯性参考系中,均是一种真实惯性力元件[4]。目前,国内已实现了惯容系统的实际工程应用[5],使用调谐质量惯容系统和隔振支座的混合控制系统,有效控制了动力设备向建筑结构的传递力。
既有的研究已经证明了惯容具有控制位移[6-7]、加速度[8]等响应的能力[8-10],但在进行惯容减震结构设计时,现有方法主要针对特定单一指标展开[11]。然而,对于建筑结构的抗震安全性和正常使用功能等需求而言,需要考虑多重指标对结构性能的影响。已有的多性能指标设计方法主要从经验假设出发[8],或借助优化算法进行迭代[12]来确定参数。
因此,本文针对惯容减震结构,提出一种基于非线性黏滞阻尼元件的惯容减震结构多指标控制策略。在设计时首先确定惯容减震结构的位移与加速度响应等性能评价指标。之后,基于靶向控制原理,选择目标受控模态,通过闭合解析公式求解惯容系统参数和优化布置位置。最后,通过一个算例对本文提出的控制设计方法进行验证。
1 复合靶向控制原理
1.1 力学模型
惯容元件[13]是一种相对加速度相关的力学控制元件,可以产生比自身质量高数千倍的表观质量,具有显著的质量增效特性[14],其产生的惯性力与其相对加速度成正比[13],如式(1)所示:
式中,Fin为惯容元件的出力,min为惯容元件的表观质量,u¨1、u¨2为惯容元件两端的加速度。
惯容系统[15]是包含惯容元件的控制系统,具有表观质量增效[16]、阻尼耗能增效[17]和靶向控制[18]特性,能够减小输入进主结构的能量。在阻尼系数相同的情况下,惯容系统能够放大其内部阻尼元件的变形,提升其耗能效率,具有耗能增效的优势[17]。在前期研究[18]中发现,利用惯容系统的优势能够实现建筑结构特定目标模态响应的精准控制,其在复合靶向控制方面是一种有潜力的手段。
惯容元件如图1所示,惯容系统如图2所示。

图2 惯容系统Fig.2 Inerter system
1.2 靶向模态设计方法
Zhang等[18]提出控制主自由度,即控制原结构以特定的振型振动的第i阶模态响应,从而实现对结构靶向模态响应的控制;采用性能指标量化惯容系统减震效果,根据需求确定惯容系统设计参数。对于结构的第i阶模态,所安装的惯容系统关键设计参数惯质比 µi、刚度比 κi及名义阻尼比 ξi分别定义为:
式中,min,i、kd,i及cd,i分别为调谐到结构第i阶模态的惯容系统的表观质量、刚度及阻尼系数,分别为第i阶模态的广义质量和广义刚度。假设定点理论设计得到的惯容减震单自由度结构位移传递函数峰值与安装黏滞阻尼器的单自由度结构位移传递函数峰值一致,可以得到相同位移传递函数峰值下的惯质比ui与等效阻尼比 ζeq之间的关系:
确定惯质比ui后,再通过定点理论得到惯容系统其他设计参数,即刚度比 κi和名义阻尼比 ξi,即:
由式(2)~式(5)确定所需的惯容系统实际参数min,i、kd,i和cd,i后,对其安装方案进行设计。考虑到惯容系统出力与结构安装楼层处的相对变形有关,将调谐到结构第i阶模态的惯容系统参数,按照第i阶振型 ϕi的各层间振型差值 Δϕi进行分配,即:
式中: λi,n为分配系数;分别为分配到第i阶模态第n层的惯容系统表观质量、阻尼系数和刚度;各层间的振型差值 Δϕi,n=ϕi,n-ϕi,n-1,其中i为阶数,n为楼层, ϕi,n为第i阶振型向量的第n层对应元素。由此得到复合靶向设计下的各层惯容系统参数和安装方案。
1.3 多指标减震控制效应
采用惯容减震技术,能实现加速度和位移响应的多项性能指标复合靶向控制。在进行地震作用下的结构位移和加速度验算时,惯性减震系统可以精准全面地控制结构的多个关键性能指标,达到低成本满足多项关键性能指标而不影响其他性能的目的。
利用调谐惯容减震系统能够实现建筑结构模态响应的靶向控制,这种对结构动力特性的精准调谐不仅体现在位移相关指标上,对于绝对加速度响应的控制也同样适用。惯容减震系统的位移与加速度双控效果如图3所示。由图3可见,对于原结构、阻尼比为0.1的消能减震结构和靶向控制设计下等效阻尼比 ζeq=0.1的惯容减震结构,在频比为1附近的共振频段中,惯容减震结构的位移和绝对加速度响应的峰值同时降低。
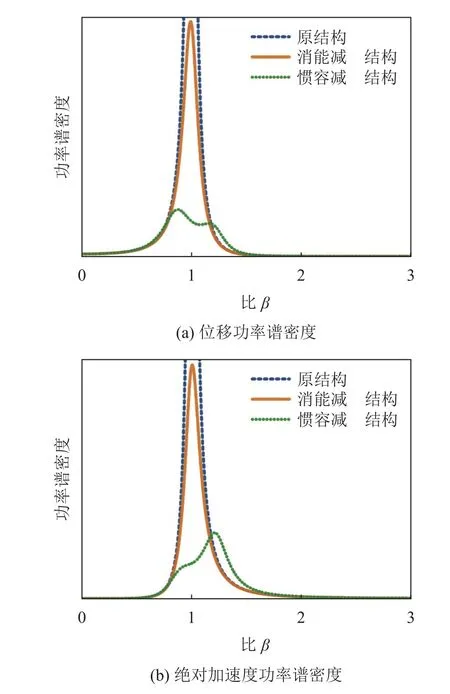
图3 惯容减震系统的位移与加速度双控效果Fig.3 Acceleration-displacement dual control of the inerter-based system
所采用的性能指标为结构位移角限值 θc和楼面水平绝对加速度限值aabs,c,以此对惯容系统的减震性能进行评估,使结构各层响应满足:
式中: θn为第n层层间位移角;aabs,n为第n层绝对加速度;n=1,2,···,N。
1.4 复合靶向控制设计流程
利用惯容系统控制结构位移与加速度为主的多性能指标,获得基于复合靶向模态控制的惯容减震结构位移和加速度双控设计,设计流程如图4所示。具体步骤为:
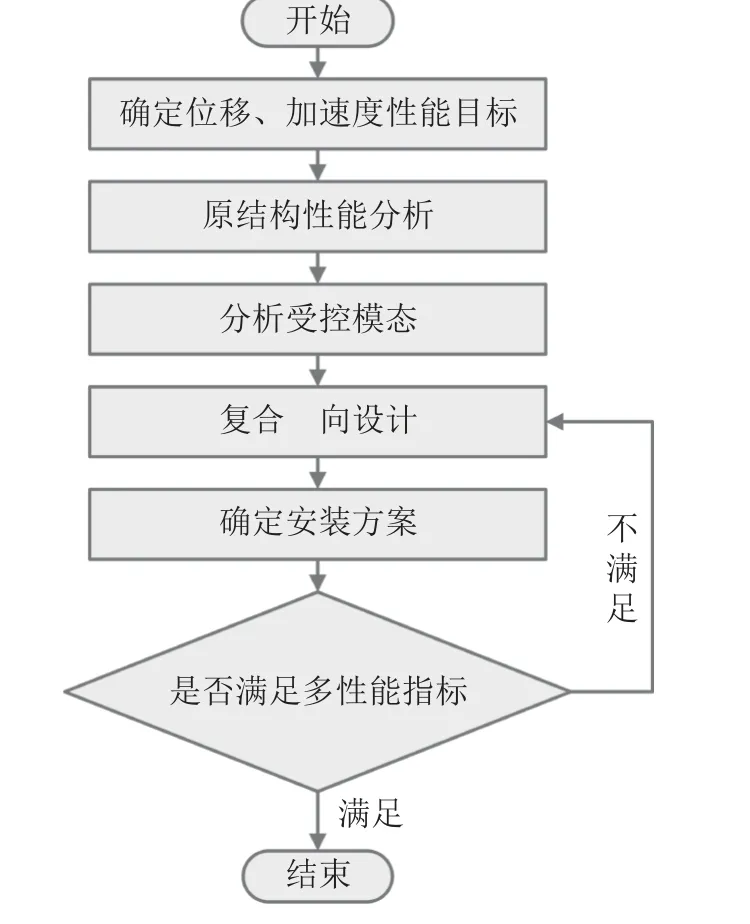
图4 复合靶向模态控制的惯容设计流程图Fig.4 Flowchart for the compound targeted design of inerter-based systems
1)提出结构位移和加速度为主的多性能目标,确定其量化指标和对应的评价原则。
2)对主结构进行动力特性分析,选择需要目标模态;分析目标模态振型 ϕi中相对变形最大的楼层,作为惯容系统的安装位置。
3)选择等效阻尼比 ζeq,根据式(3)~(5)确定惯容系统的归一化设计参数 ξi、 µi和 κi,根据式(2)得到惯容系统实际参数。
4)综合设计结果,根据式(7)分配惯容参数,得到各层惯容系统参数与布置位置。
5)确定非线性黏滞阻尼元件的阻尼指数和阻尼系数,以及各元件吨位等,选择适合实际工程结构的惯容系统规格与参数。
6)验证结构位移、加速度指标,若不满足,则重新确定目标模态和等效阻尼比 ζeq,重复步骤1)~5)。
根据上述过程,可以获得基于复合靶向模态控制为导向的惯容减震结构位移与加速度双控设计。
2 算 例
某项目为7层框架结构,其固有阻尼比为0.05,基本设防烈度为8度,抗震设防类别为丙类,场地土为Ⅱ类,设计地震分组为第2组(特征周期Tg=0.4 s)。对结构的一个方向进行分析,该方向基本信息见表1,表2为模态分析结果。

表1 结构基本信息Tab.1 Detailed information of the original structure

表2 结构模态分析结果Tab.2 Modal analysis results of the original structure
2.1 参数及安装位置
考虑控制对于结构实际响应贡献较大的第1阶模态响应,通过模态分解将原结构等效为解耦的主自由度系统,系统频率为结构频率 ωi,系统的特定变形形状为各阶振型 ϕi。选择第1阶模态振型中的相对变形最大的楼层作为主自由度qi,由此建立具有调谐减震需求的等效单自由度体系,用于结构的复合靶向模态响应控制。
根据设防烈度下结构位移、加速度性能目标,即层间位移角 θn和楼面水平绝对加速度aabs,确定等效阻尼比 ζeq,满足式(8)所示性能指标;由式(3)~(5),在已知等效阻尼比 ζeq的情况下,计算惯容系统的关键设计参数 µi、 κi和 ξi,相应的无量纲标准化设计参数见表3。计算惯容系统的实际参数min,i、kd,i及cd,i,通过式(7)分配各层参数,确定惯容系统的规格参数,其中选择惯容元件表观质量为200 t;同时,考虑在实际使用中采用非线性黏滞阻尼元件,根据耗能相等原则,使选用的非线性黏滞阻尼惯容系统与理论设计的线性黏滞阻尼惯容系统在同一条人工波下耗散结构的能量相同,由此确定选用的非线性黏滞阻尼指数为0.3,系数为20 kN/(m/s)0.3。最终的惯容减震结构实际规格参数见表4,惯容系统安装与布置示意图如图5所示。

表3 惯容系统无量纲标准化设计参数Tab.3 Dimensionless normalized key parameters of designed inerter-based systems
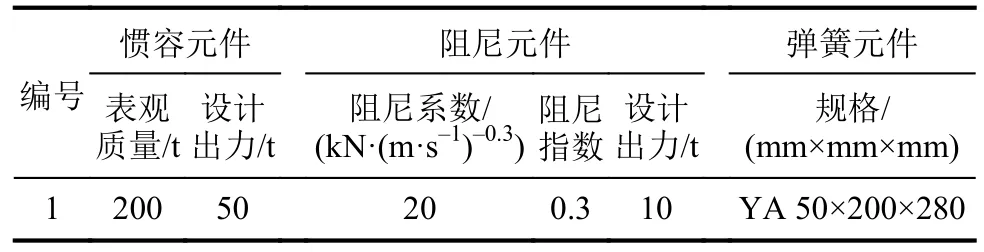
表4 实际惯容系统的规格参数Tab.4 Specification of the actual inerter system
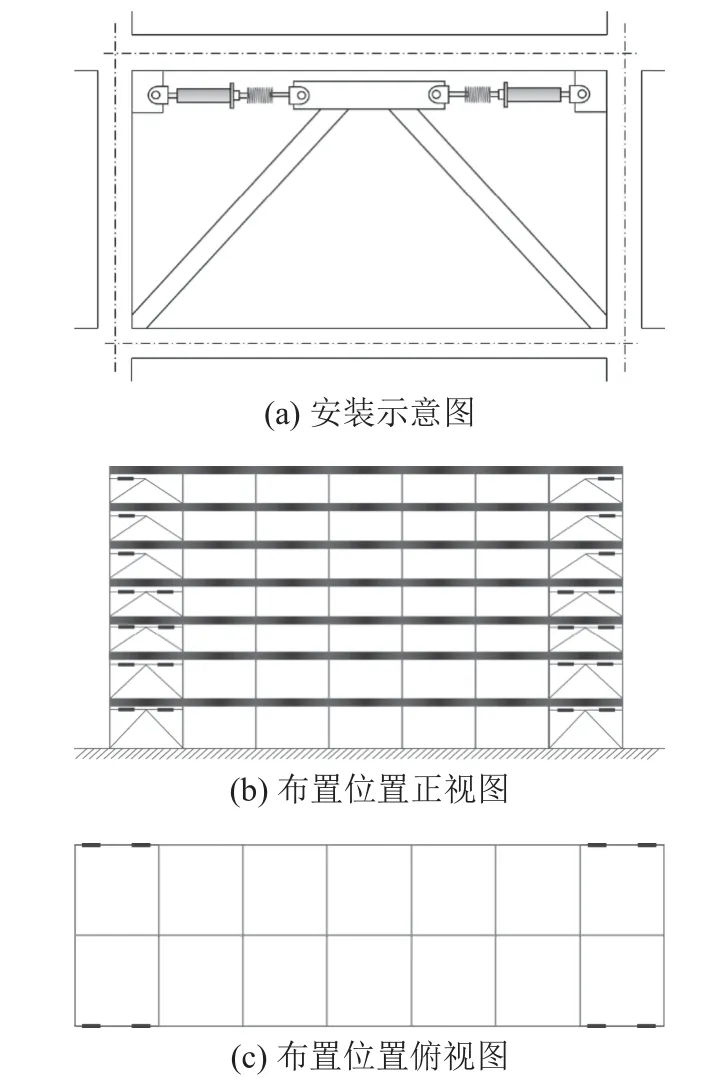
图5 惯容系统安装与布置示意图Fig.5 Schematic diagram installation and arrangement of the inerter system
惯容系统中各个元件的滞回曲线如图6所示。由图6可以看出,非线性黏滞阻尼元件滞回环饱满,具有较强的耗能能力。

图6 惯容系统滞回曲线Fig.6 Hysteretic curve of inerter-based system
2.2 复合靶向控制效果
以复合靶向模态控制为导向的惯容系统为目标,研究其对结构模态响应控制效果和结构动力特性的影响,结果见表5。由表5可知,对比无控结构和惯容减震结构的周期,调谐后的周期与无控结构相近,大致分布在无控结构原本周期的附近。说明无控结构的模态可与安装的调谐惯容系统相对应。
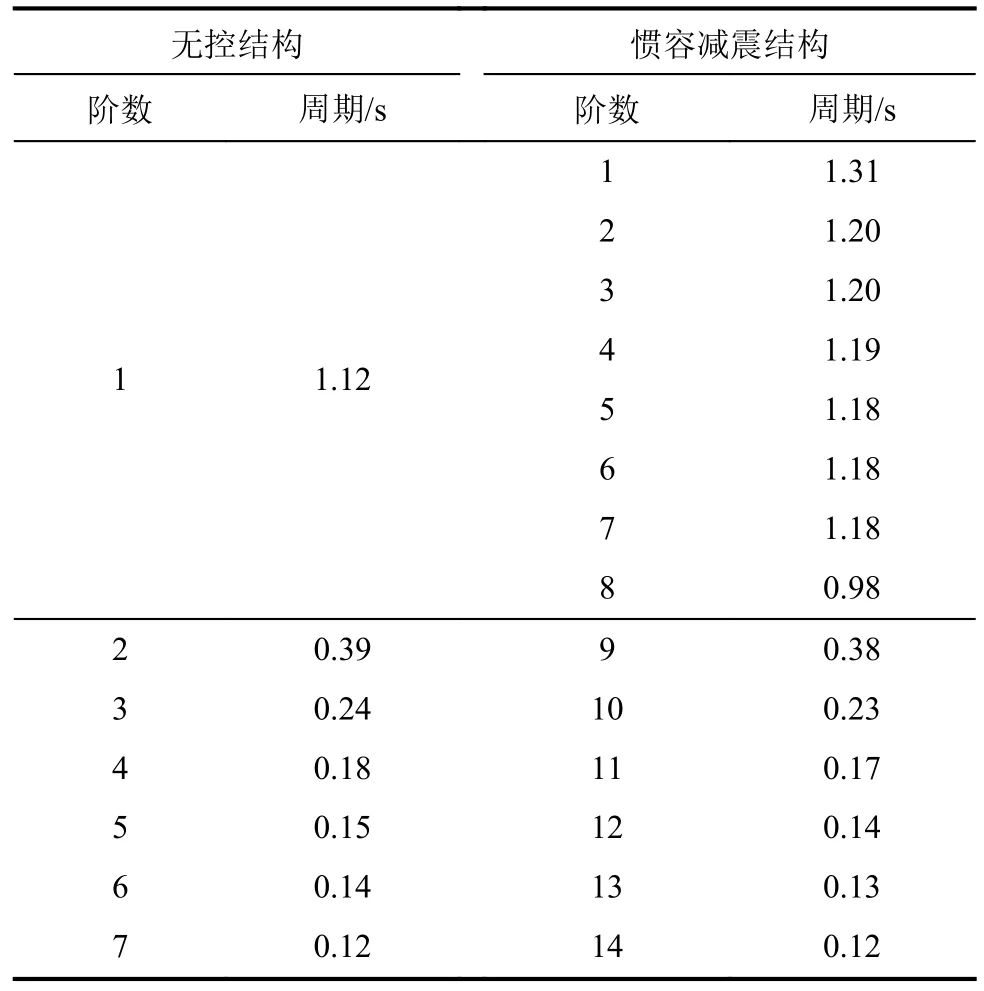
表5 无控结构和惯容减震结构的周期Tab.5 Comparative periods of the original and controlled structures
对结构第1阶模态响应峰值进行控制,顶层位移响应功率谱密度如图7所示。图7中,纵轴表示白噪声激励下主结构底层位移响应的功率谱密度。由图7可知,除了特定受控模态对应的幅值降低外,曲线其余部分几乎完全重合,说明复合靶向控制设计下的惯容系统可以降低特定目标模态的响应,并且对其余无关模态的周期和响应几乎不产生影响。

图7 顶层位移响应功率谱密度Fig.7 Power spectral densities of the displacement responses of the top story
综上所述,采用靶向设计的惯容减震结构能够在不改变结构动力特性的情况下,精确控制特定模态响应。此外,整个设计过程包括建立简单的主自由度系统和求解闭合解析设计公式,避免了大量的迭代优化计算,显著提高了惯容减震结构的设计效率。
2.3 位移和加速度双控效果
采用时程分析验证惯容系统的多指标减震效果,选取两组人工模拟加速度时程曲线和5组实际强震记录加速度时程曲线,地震波信息见表6,其中,NW1~NW5为天然波,AW1和AW2为人工波。7条波的归一化加速度反应谱、平均谱及设计反应谱如图8所示。

表6 地震波信息Tab.6 Information of seismic waves

图8 归一化地震波加速度反应谱与设计反应谱Fig.8 Normalized acceleration response spectrum and the design response spectrum
分别计算在多遇地震、设防地震和罕遇地震下无控结构和惯容减震结构的动力响应,其层间位移角、最大水平加速度及层间剪力如图9、10及11所示。由图9可见:对比地震作用下无控结构和惯容减震结构的层间位移角,惯容系统对于位移响应具有良好的减震效果;在设防地震和罕遇地震下,无控结构位移角超过限值[19],惯容系统提高了结构性能,满足了位移角指标。

图9 层间位移角Fig.9 Inter-story drift angle
由图10可见,安装惯容系统后,结构的最大水平加速度可以满足设防地震下0.25g和罕遇地震下0.45g的限值,减小了结构绝对加速度响应,基本能保证建筑内非结构构件和设备的正常使用。由图11可见,安装惯容系统同样能够抑制层间剪力响应。

图10 最大水平加速度Fig.10 Maximum lateral acceleration
2.4 消能减震结构的比较
对惯容减震结构和安装黏滞阻尼器的消能减震结构的多指标控制进行对比分析,定义层间位移角减震比 γθ和绝对加速度减震比 γaabs为:
式中, θ0、aabs,0分别为无控结构位移角、 楼面水平加速度。表7、8分别为输入AW1波的设防地震作用下结构层间位移角、楼面水平加速度的减震效果对比,其中,消能减震与惯容减震结构具有相同的黏滞阻尼。由表7、8可知:两种控制装置均具有一定的减震效果,惯容减震效果优于传统的黏滞阻尼器,在层间位移角较大的结构底部,安装黏滞阻尼器的消能减震结构层间位移角减震比约为20%;而惯容系统可进一步降低响应,层间位移角减震比超过40%。对于楼面水平加速度,黏滞阻尼器控制作用有限,部分楼层的绝对加速度峰值超过无控结构,而惯容系统对于加速度指标同样具有较好的控制效果。顶层时程响应曲线如图12所示。由图12可见,顶层位移、绝对加速度时程响应结果验证了惯容减震的优越性,可实现结构位移和加速度关键性能指标的高效复合控制。

表8 楼面水平加速度减震效果对比Tab.8 Vibration mitigation effect comparison of horizontal absolute acceleration

图12 顶层时程响应曲线Fig.12 Time history responses of the top floor
图13为安装在底层中惯容系统的黏滞阻尼元件滞回曲线。由图13可以看出,和具有相同的阻尼系数和阻尼指数的单一黏滞阻尼器滞回曲线对比,惯容系统中的阻尼元件变形明显大于单一的黏滞阻尼器变形,相应的阻尼力也明显提升。因此,惯容系统中的非线性黏滞阻尼元件比单一阻尼器耗散的能量更多,具有显著的耗能增效效果。
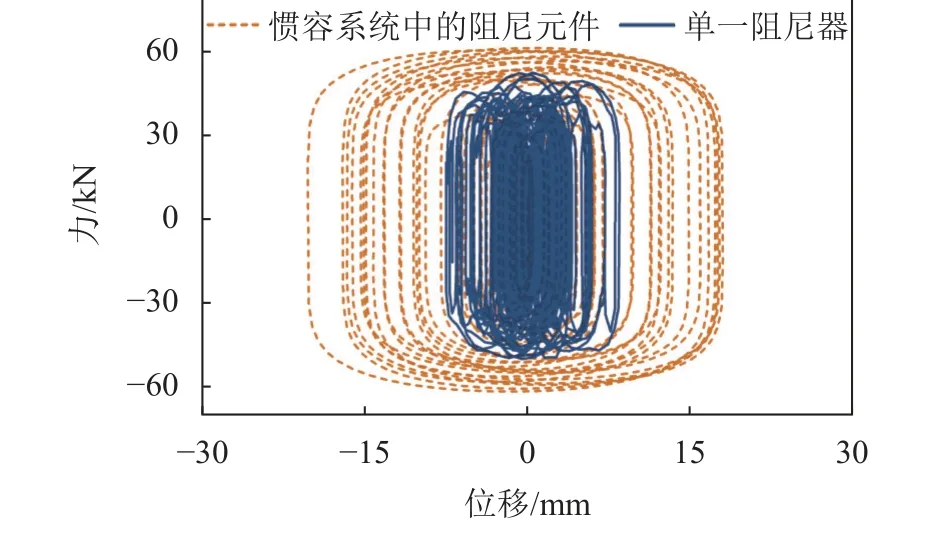
图13 惯容系统中的阻尼元件与单一阻尼器的滞回曲线Fig.13 Hysteretic curves of damping element in merter system and a single damper
3 结 论
本文提出了一种结合非线性黏滞阻尼元件的惯容减震结构多目标性能控制策略。该方法充分考虑了惯容器相对加速度相关的惯性调节机制,利用惯容系统降低结构位移和加速度相关的多项性能指标,包括层间位移角、楼面水平加速度等。主要结论如下:
1)提出的惯容系统多指标设计方法能够同时降低位移角、楼面水平加速度、层间剪力等地震响应,实现位移和加速度双控下的复合靶向减震效果,满足建筑安全性和正常使用功能要求。
2)惯容系统所采用的非线性黏滞阻尼元件滞回环饱满、耗能充分,安装方案考虑了各元件的实际规格与参数,对于实际工程结构具有参考性和适用性。
3)惯容系统实现了多个性能指标的低阻尼和高耗能控制,具有显著的耗能增效作用,可解决传统黏滞阻尼器对加速度指标减震效果不足的问题。
