工业机器人技术综合实践项目式教学探讨*
2023-10-10强红宾王联丁力单文桃巢渊江苏理工学院江苏常州213000
强红宾 王联 丁力 单文桃 巢渊江苏理工学院 江苏 常州 213000
引言
2015年我国为实现制造业强国战略提出了“中国制造2025”计划,2017年教育部提出“新工科”建设计划,要求我国高校要能够培养出有创造力、有良好工程意识的毕业生。
“工业机器人技术综合实践”课程是机器人工程专业综合性、实践性和工程性很强的专业核心课,是大学生锻炼创造力、工程实际能力与综合能力的主要环节。改实践涉及机械设计、力学、电学、伺服电机、传感器、自动控制等多方面的基础知识。一般在学习“机器人技术基础”、“机器人测试技术”等专业课程基础之后开设。因此,该课程主要培养学生的实践动手能力、综合应用能力及技术创新能力。
1 工业机器人综合实践课程教学现状
目前,该实训课程一般是对工业机器人进行示教路径规划、PLC编程等,对现有的工业机器人进行应用,没有根据需求对工业机器人进行设计、制造环节,不能培养工程应用能力,对工程意识的培养有不利影响,具有主题单调,缺乏创新。缺乏团队合作、设计不完整,缺乏整体意识的缺点[1-2]。
2 工业机器人技术综合实践项目式教学方法
工业机器人技术综合实践主要目标是对多门专业核心课程进行综合,使机器人工程专业学生能够对机械、机器人、控制系统有整体感受。基于项目式教学的工业机器人技术综合实践[3-4],涉及的专业知识及项目实施流程如图1所示。
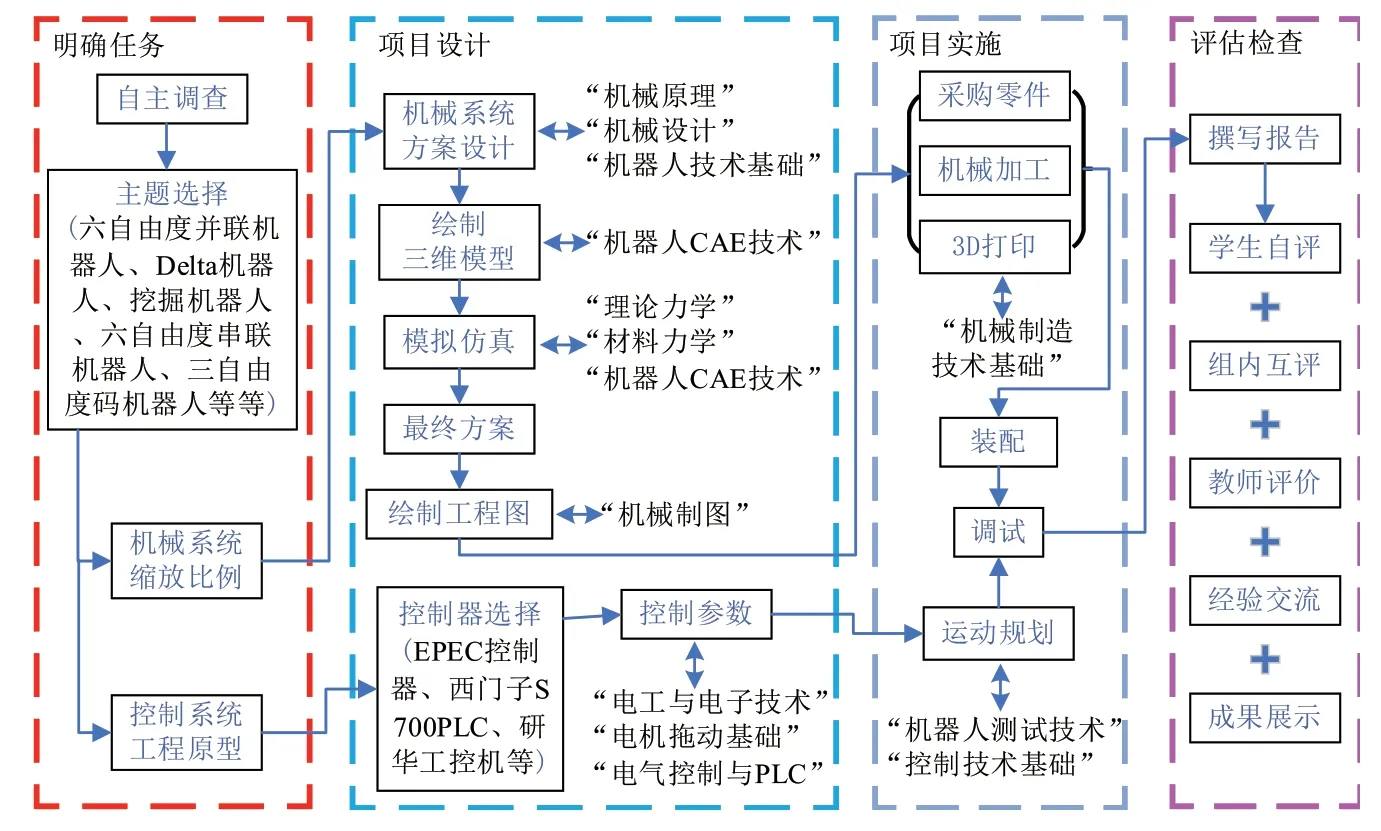
图1 工业机器人技术综合实践实施过程
2.1 明确任务
允许学生对项目进行自主选题,既拓展项目范围,又提高学生兴趣,给其充分想象空间,使其学会独立思考[5]。综合实践项目可以为六自由度机器人、Delta机器人、挖掘机器人、三自由度码机器人等,其驱动方式可以为电液伺服驱动、电动或气动。由于实际工业机器人的造价高、复杂性大,对学生机器人技术综合实践来说完成难度大、费用高、不利于实施,因此本次改革提出,学生在真实工业机器人的基础上建立一个机械系统的比例模型进行设计、制作与装配,但控制系统仍然采用真实的工业控制器,如EPEC控制器、西门子S700PLC等。因此,学生的项目任务为:①根据工程任务需求选定一款工业机器人;②设定其工作空间、负载能力、额定功率等性能指标,并对机械系统进行等比缩小;③小组任务分工,每项任务保证至少有2个学生参与,保证每项任务都经过小组讨论后做出决定。
2.2 项目设计
对于比例缩小的机械系统,进行机械设计,首先应用专业核心课程内容,对工业机器人进行运动学分析,根据工业机器人工作空间来确定机构参数,根据负载能力,进行结构设计。其中,非标结构件主要包括机器人的机械臂、底座、夹具等,标准件主要包括轴承、紧固件、齿轮、导轨等。在设计过程中,对于简单的结构可以采用《理论力学》、《材料力学》中的知识点进行受力分析,对于复杂的结构可以采用ANSYS等软件进行受力分析。对于机器人的驱动能力可以采用ADAMS等软件进行功率校核。通过分析、校核,机械结构合格后,对非标结构件绘制工程图纸。对工业机器人进行运动控制,根据工业机器人工作顺序、定位精度等来确定工业机器人控制方法、控制参数等。
2.3 项目实施
根据三维模型、二维图纸对机械结构进行加工、制作、装配。对于标准件直接进行采购,对于简单的零件可根据二维图纸直接进行加工,对于复杂的零件可以用3D打印机制造。目前,实验室3D打印机可满足学生自行打印。最终对机械加工件、3D打印件、标准件进行装配、完成工业机器人的本体制作。此外,对工业机器人电路系统进行连接,并根据工作顺序对工业机器人进行路径规划,根据不同控制器编写PLC、C语言等运动控制程序,最终完成工业机器人整体安装调试。
2.4 评估检查
基于项目式教学的机器人综合实践,以项目考核与以赛代考的形式进行考核。调动学生的积极性,锻炼学生综合分析解决问题的能力,为在机器人竞赛获得优异成绩打下基础,提高学生的机器人应用能力与就业竞争力,以适应社会与产业对机器人创新人才的需求。在评估的过程中,学生首先进行自评和组内互评,依次保证组内学生之间的公平性,然后进行教师评阅。对于本组学生撰写报告,包括项目实施过程中的具体过程,如机器人项目的选择、方案设计过程、项目实施过程中遇到的问题及解决办法、最终项目展示以及整体过程中项目实施经验总结与分享。
3 综合实践举例
根据项目实施流程,对一组基于挖掘机器人项目的工业机器人技术综合实践进行说明,如图2所示,具体过程如下:
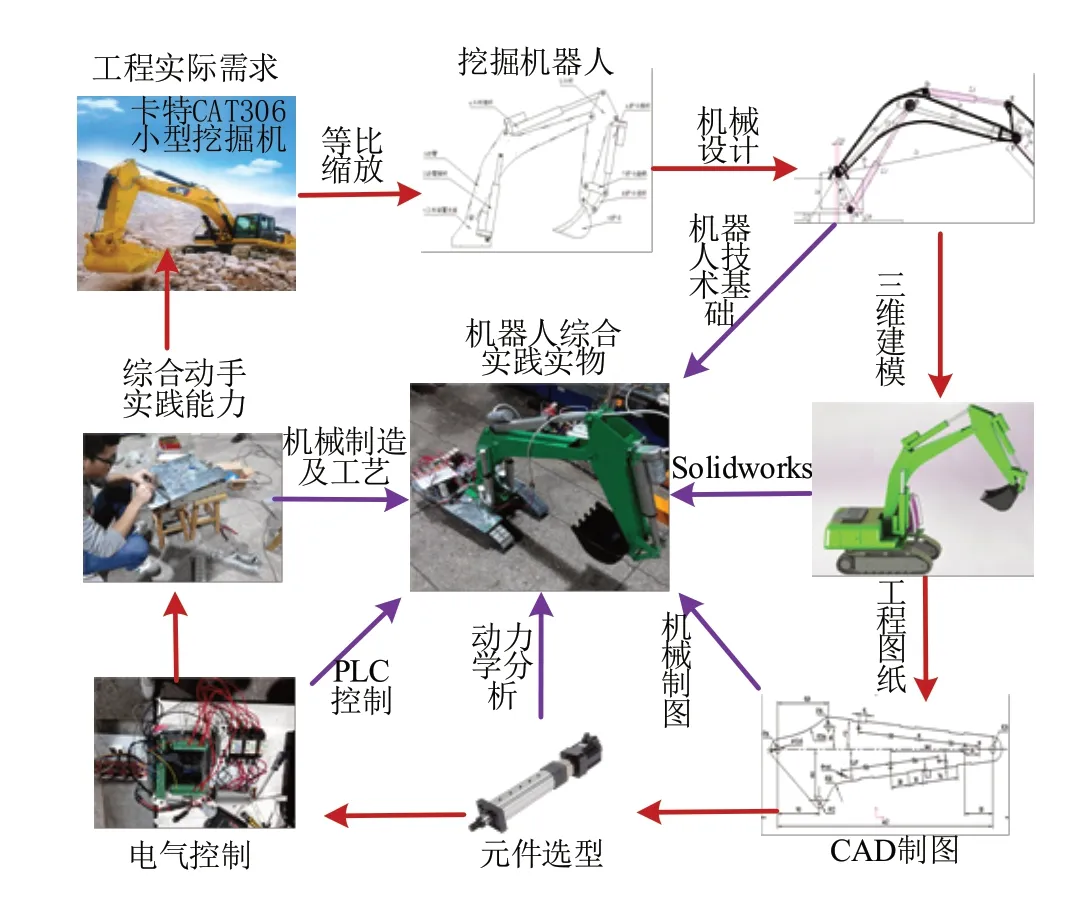
图2 挖掘机器人课程实践
3.1 明确任务
本组学生认为,随着“一带一路”政策的实施,其在不断推动基础设施建设,而挖掘机器人是基础设施建设必不可少的工程机械,因此研究与开发挖掘机器人具有十分重要的现实意义。因以“挖掘机器人课程实践”作为项目任务。课题选定后,学生对挖掘机器人进行具体的调查,了解其工作原理和各部件结构,教师带领同学参观卡特CAT306小型挖掘机器人的实际生产过程或相关视频。通过调查和参观,学生对挖掘机有一定的了解。在此基础上,学生根据原型确定缩放比例,获得项目参数,如表1所示。
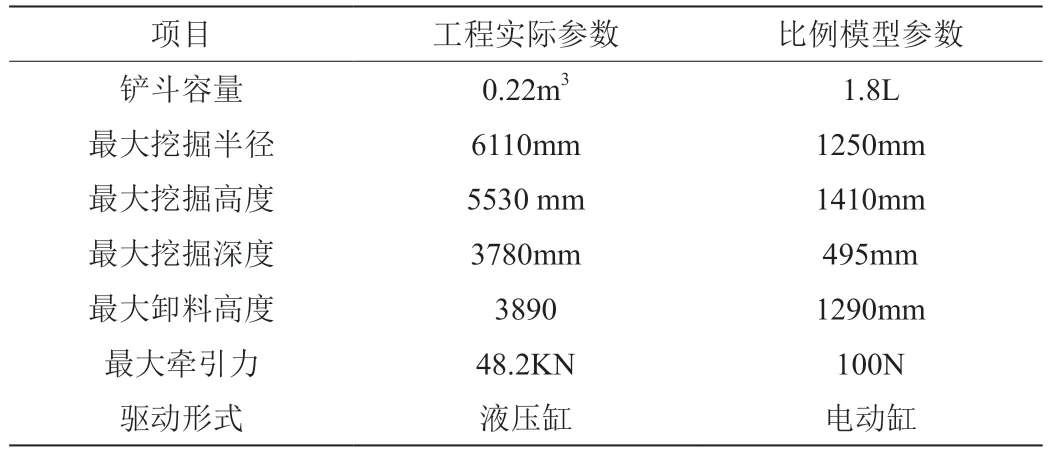
表1 项目任务参数
3.2 项目设计
对挖掘机器人进行运动学分析,根据工业机器人表1所示的工作空间来确定工业机器人机构参数,动臂总长716mm,斗杆总长462mm,动臂电动推杆行程150mm,斗杆电动推杆行程200mm,铲斗使电动推杆行程150mm。确定挖掘机器人机构参数后,根据铲斗1.8L的负载能力,对挖掘工业机器人进行结构设计,包括非标结构件的设计和标准件的选型。采用Solidworks建立三维模型,并采用ADAMS等软件进行功率校核,最终绘制工程图纸。控制系统采用西门子S700PLC,对其进行单臂动作、双臂联合动作、三臂联合动作编程,并能够自动实现3种典型挖掘动作。
3.3 项目实施
根据二维图纸对挖掘机机械臂结构进行加工,对于履带、螺栓等标准件进行采购,完成工业机器人本体制作。对挖掘机器人电路系统进行连接,并根据工作顺序对工业机器人进行编程,最终完成挖掘机器人整体安装调试。
3.4 评估检查
基于Solidworks制作动画、撰写设计计算及项目实施过程。首先进行学生自评和组内互评,然后教师根据报告进行评阅。通过此次的实践课程可以将机器人专业理论课程的相关内容有机结合起来使学生对机器人结构设计和电子、电气控制的软硬件的设计过程有全面的了解,使学生掌握机电产品工程设计的基本方法,提高其分析问题和解决实际工程问题的能力,将专业课程内容有机而系统地结合起来。
4 结束语
基于项目式教学的工业机器人技术综合实践,充分考虑的实际工程项目,通过对工业实际机器人进行比例缩放,进行设计、制造、装配及调试,让学生全面了解工业机器人的生产过程,行程一个有机整体,且最大限度的综合本专业核心课程、锻炼学生了的实践能力。该基于项目式教学的工业机器人技术综合课程实施后,学生普遍反映工业机器人技术综合实践课程的效果比以前有所提高。