一种基于全天相机组网的区域火流星监测网的实现和应用∗
2023-10-09徐智坚肖焱山赵海斌
徐智坚 肖焱山 李 彬 赵海斌
(1 三峡大学理学院 宜昌 443002)
(2 中国科学院紫金山天文台行星科学重点实验室 南京 210023)
(3 中国科学技术大学天文与空间科学学院合肥230026)(4 中国科学院比较行星学卓越创新中心 合肥 230026)
1 引言
火流星是指小尺寸近地小天体进入大气层后与大气剧烈摩擦发生烧蚀、空爆、裂解, 并伴随发热发光的现象, 部分火流星未完全烧蚀可陨落到地表成为陨石. 火流星不仅能通过空爆、撞击对人类活动区域构成直接威胁, 对在轨航天器的安全运行也构成现实性威胁, 如国际空间站(International Space Station, ISS)、哈勃太空望远镜(Hubble Space Telescope, HST)、韦布太空望远镜(James Webb Space Telescope, JWST)都遭遇过流星体撞击.
近地小天体随着直径的减小数量呈幂律增长,直径10 m以上的数量约108颗, 直径3 m以上的数量约109颗. 较大尺寸的近地小天体可以通过天文望远镜开展巡天观测来进行搜索和监测, 而小尺寸的近地小天体通常很难被望远镜提前发现, 难以了解其轨道特性、陨落地点、撞击危害等关键信息, 监测近地小天体进入地球大气层后的火流星事件是解决此问题的唯一途径.
全球每年监测到约4000次直径10 m以下的近地小天体撞击引发的火流星事件. 为实现对近地小行星及火流星的有效监测、精确定轨并及时做出落点预判, 许多国家和地区大力发展和研究观测技术, 在过去的十年中视频监控技术与多站点组网已成为目前最主要的观测技术与手段. 同时, 基于监测数据建立火流星数据库, 可为完善近地小行星数密度分布模型[1]、研究母体及来源[2]提供数据支撑.
1.1 小尺寸近地天体撞击威胁
小行星撞击持续发生. 6500万年以前一颗直径超过10 km的小行星撞击墨西哥湾希克苏鲁伯可能是导致恐龙灭绝的主因[3]. 1908年西伯利亚通古斯地区, 一颗40 m直径近地小行星空爆导致2150 km2范围内的树木被摧毁[4]. 2013年2月15日俄罗斯车里雅宾斯克一颗直径约17 m的近地小行星进入大气层, 空爆导致1500多人受伤及7000多座建筑受损[5]. 在我国, 一颗直径4.2–9.4 m的小行星以低仰角进入大气层后分裂陨落到地表形成世界最大陨石散落带–阿勒泰铁陨石陨落带[6]. 1976年3月8日吉林市北郊一颗小行星在离地表19 km处发生空爆, 主体裂解后陨落在近500 km2范围内形成陨石雨. 2017至2022年, 我国云南香格里拉、云南西双版纳、吉林松原、青海玉树、河南驻马店及甘肃龙德接连发生超级火流星事件, 并有陨石坠落.其中2020年12月23日青海玉树一颗直径约6.5 m的小行星引发了火流星事件, 空爆产生9.5 kt TNT(Trinitrotoluene)当量的能量, 成为我国近年来最大的一次火流星事件[7].
火流星事件随机出现, 目前主要依靠目击者描述、安防监控、行车记录仪等被动途径获得信息,缺乏主动开展的系统性监测. 一方面, 监测缺乏使得针对火流星事件的流星体轨迹参数的解算、轨道和母体溯源、进入大气层前物理特性反演、陨落区的计算等问题变得困难; 另一方面, 由于目前发现的10 m级近地小行星数量不及理论预测的0.1%[8], 样本数少且存在系统偏差, 从而导致了近地小行星尺频分布在小尺寸端存在很大的不确定度, 对于米级大小的数量估计偏差可达5倍[9]. 因此,构建区域级火流星监测网来开展常态化、多站点、全天区、联合组网观测, 有助于精确刻画火流星事件的特性参数, 并完善小尺寸近地小行星的尺频分布模型.
1.2 国内外火流星监测技术发展现状
火流星监测经历了胶片相机、数码相机、模拟摄像机和CMOS (Complementary Metal Oxide Semiconductor)相机等观测技术的发展. 20世纪60年代, 德国和捷克共同建设了首个火流星监测网–欧洲火流星网(European Fireball Network,EN)[10], 通过胶片相机加装旋转快门拍摄长曝光照片的方式进行监测, 照片冲洗后进行肉眼搜寻及位置、速度测量, 主要开展火流星计数统计研究.21世纪初, 数码相机和CCD (Charge Coupled Device)相机逐渐取代胶片相机, 但仍采用旋转快门方式获取时间信息. 澳大利亚沙漠火流星网(Desert Fireball Network, DFN)[11]沿用并改进了这种监测方式, 通过de Bruijn序列驱动液晶快门将精准的时间编码加入长曝光图像中, 从而获得高精度的时间、位置及光度等信息, 实现轨迹和轨道计算. 同时期, 低照度模拟摄像机的普及使得视频监控成为流星监测的主要方法. 美国、加拿大、日本、欧洲等地相继建立或升级了流星视频监测网, 发展了如ASGARD (All Sky and Guided Automatic Realtime Detection)[12]、UFOCapture系列[13]等流星监测软件, 实现了监测数据的近实时处理, 但视频分辨率低且轨迹位置的测量精度不佳. 近年来,CMOS相机开始应用于流星视频监测, 其低噪点、高感光度、高分辨率等特点提升了监测灵敏度和分辨率. 采用USB (Universal Serial Bus)或网络方式传输数据可以简化安装过程. 如法国火流星观测及陨石回收网络(Fireball Recovery and InterPlanetary Observation Network, FRIPON)[14]、全球流星网(Global Meteor Network, GMN)[15]等, 发展了如FreeTure (Free software to capTure meteors)[16]、RMS (Raspberry Pi Meteor Station)[15]等监测软件及WMPL(WesternMeteorPyLib)[17]等数据处理程序, 进一步提升了监测效率和数据处理的实时性.
流星视频监测设备主要采用两种方案: (1)相机配置广角镜头, 因单相机监测视场小, 通常多相机组合使用, 如全球流星网、美国全天流星监测项目(Cameras for Allsky Meteor Surveillance,CAMS)[18]等. 优势在于流星监测极限星等更低,主要用于暗弱流星群活动监测、新流星群确定等; (2)相机配置鱼眼镜头, 单相机覆盖全天视场, 系统结构简单, 便于大范围组网. 如美国国家航天局(National Aeronautics and Space Administration, NASA)全天火流星监测网[19]、法国FRIPON网及澳大利亚DFN网等, 主要用于火流星监测及陨石回收.
我国在北京、山东、江苏、新疆等地建立了一些零星的流星视频监控站点并开展了小规模组网.青岛艾山天文台与国家天文台合作开展了流星光谱监测, 并与爱好者合作开展流星视频监测, 将视频数据提交至国际流星组织(International Meteor Organization, IMO). 中国科学院地质与地球物理研究所在海南乐东和三亚开展了光学、综合雷达和光谱多波段探测, 研究流星体进入大气后对近地空间环境的影响[20–21].
为了满足火流星事件监测需求, 本文提出了一种基于多站布局的全天视频相机组网监测系统.利用该系统构建了江苏区域火流星监测网(Jiangsu Regional All-sky Fireball Network, JsRAFN), 对系统监测能力、监测数据统计信息的可靠性进行了分析, 形成可复制、可推广部署的火流星监测原型网.
2 区域火流星视频监测网系统技术原理及系统构成
2.1 系统构成
监测网系统单站点硬件如图1所示, 主要硬件设备由天文相机、鱼眼镜头、小型工业计算机及远程控制终端组成, 见图1左图. 部分站点采用4G网络终端及太阳能供电系统提供网络和电源. 相机和镜头安装在透明圆顶密封的专用外壳中, 直接固定在基墩或立柱上, 见图1右图.

图1 监测网系统单站点硬件, 左: 主要硬件设备, 右: 透明圆顶密封的专用外壳Fig.1 Single station hardware for monitoring network system, left: main hardware equipment, right: special enclosure with sealed transparent dome
天文相机采用IMX485 CMOS芯片, 像素大小2.9µm, 靶面尺寸为1/1.2英寸, 具有低噪点、高感光度等特点. 图像分辨率为1440×1088(2×2像素合并, 即bin2), 空间分辨率为9.9(′)/pixel. 视频帧率为每秒20帧(20 fps), 即提供0.05 s的流星轨迹时间分辨率. 配备2.5 mm/F1.6鱼眼镜头, 镜头像圈直径为6.4 mm, 与相机芯片宽度6.322 mm适配, 可以实现180◦全天视场覆盖监测.
小型工业计算机(配置为Intel i7 CPU, 16G内存)作为控制终端与相机通过USB 3.0线连接, 固态硬盘用于短期数据存储, 机械硬盘存储所有流星视频数据, 同时通过FTP (File Transfer Protocol)回传至数据中心服务器, 站点与数据中心互为异地备份. 通过网络时间协议(Network Time Protocol,NTP)服务同步控制终端时间, 同步间隔10分钟. 远程控制终端对小型工业计算机实现远程桌面、远程开关机等操作.
监测网系统程序主要由Python代码实现. 流星监测视频采集及识别采用OpenCV库. 火流星触发监测后程序将事件前后1–2 s (可设置)的视频合并存储在硬盘中, 视频片段为avi格式, 视频帧叠加生成png和fits格式流星图片. 程序还提供: 站点信息、拍摄时段、触发阈值及边缘遮盖等管理功能. 轨迹计算程序包含测量输出、时间偏差校准和轨迹计算等功能, 并采用WMPL软件包[17]进行蒙特卡洛参数优化及轨道计算.
2.2 技术原理
火流星监测采集基于三帧差分法, 分别计算前2帧(fβ-1、fβ)和后2帧(fβ、fβ+1)的图像差分,阈值为U, 再将两次的差分图像Dβ、Dβ+1进行与运算, 则可以得到移动目标变化区域D(x,y):
视频片段存储采用帧缓存列队法, 目标源出现并达到检测阈值时触发视频记录, 将缓存队列中事件前后的帧合并存储, 流星监测视频片段帧序列如图2所示.
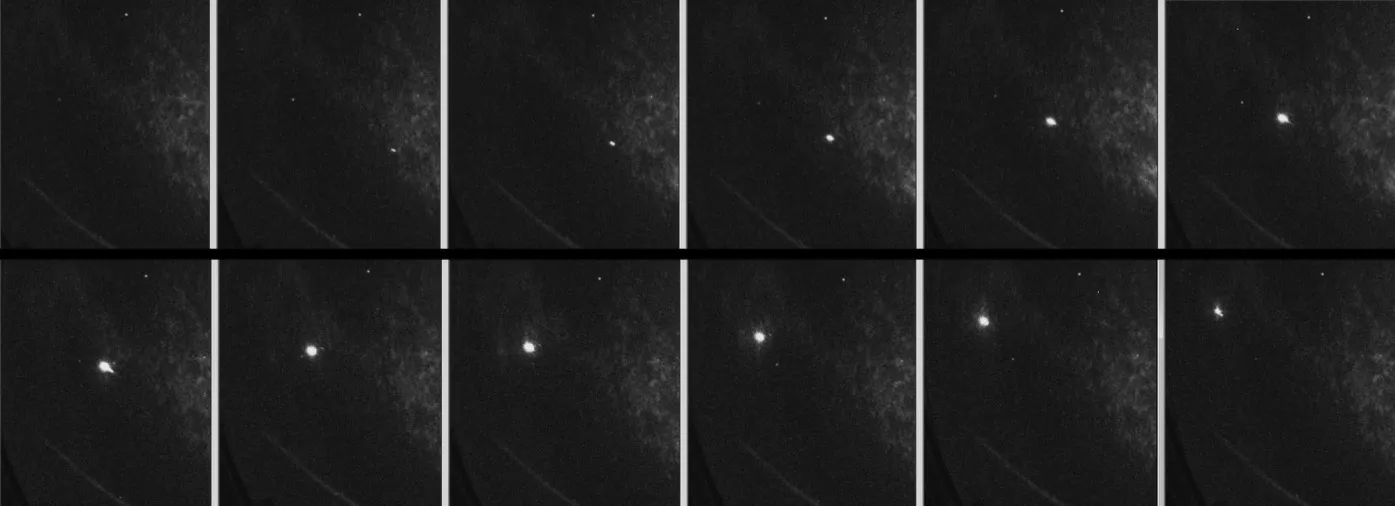
图2 流星监测视频片段帧序列Fig.2 Frame sequences of meteor monitoring video clips
星点提取通过在图像上寻找局部极大值实现,再使用二维高斯点扩散函数(Point Spread Function, PSF)拟合确定星像中心位置(ximg,yimg), 排除错误识别的星点. 视频单帧图像曝光时间短,可识别恒星数目少(15–30颗), 难以完成精确的天体测量校准. 定期在晴朗无月夜间隔30分钟拍摄10 s曝光图片, 每晚可获得约2000颗均匀分布于全天视场的参考星用于天体测量校准. 由于相机安装无法使光轴投影中心与真实天顶严格重合, 图片的正北方向也难以和地理正北方向对齐,在Ceplecha[22]和Borovicka等[23]的经典方法中需要拟合13个常数, 且拟合对初值非常敏感. 因此我们采用机器学习方法进行天体测量校准. 由于径向基函数网络(Radial Basis Function Network,RBFN)具有结构简单、训练简洁、学习收敛速度快、非线性逼近能力强、能够克服局部最小值等特点, 适用于全天相机图像的天体测量校准, 该方法在Tian等人的实际使用中结果很理想[24],径向基函数网络采用PyRadbas软件包实现.
本文先由简化模型快速匹配参考星, 再由基于径向基函数网络方法完成天体测量校准. 首先选取部分亮星得到仅包含5个参数(图片X轴与正北方向夹角A0, 图像中心坐标(x0,y0), 参数(c1,c2))的简化天体测量模型:
式中A、z分别为所求星像的方位角和天顶距,r为所求星像到图像中心的距离. 由简化模型可以快速得到星表参考星(Acat,zcat)在图片上的预期坐标(xcat,ycat):
其次, 以预期坐标为中心、6像素为半径的区域内匹配图中对应星像得到(Acat,zcat)与(ximg,yimg)关联列表. 将(ximg,yimg)列表作为径向基函数网络的输入集, (Acat,zcat)作为输出集进行训练. 由此可计算视频帧中任意测量点(xmeas,ymeas)的方位角A和天顶距z. RBFN方法校准的残差分布如图3, 方位角残差由∆Asinz表示,标准差为3.41′,天顶距残差由∆z表示, 标准差为1.47′.
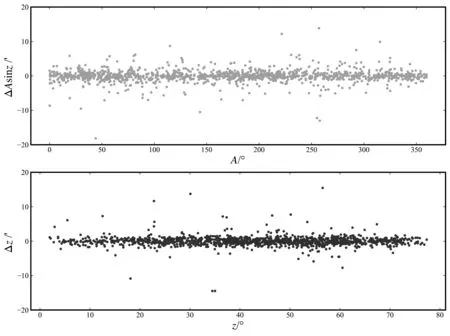
图3 RBFN方法天体测量校准残差分布Fig.3 Astrometric calibration residuals of the RBFN method
进一步对流星视频数据进行分析, 得到包含流星每个测量点的时间、视速度、轨迹起点-终点坐标(赤经、赤纬、高度角、方位角)等结果. 快速筛选符合时间匹配范围(±2 s)的视频片段, 再通过站间距离、站点与流星轨迹组成平面的最小夹角QAB、视速度及轨迹重叠率等信息确定双站、多站匹配数据.
火流星轨迹计算基于三角测量法, 结合相交平面和视线拟合法, 并使用Vida等人提出的蒙特卡洛法[17]优化轨迹结果. 首先, 当两个站点同时观测到一颗火流星, 站点与流星视轨迹构成拟合平面,平面的单位法向量分别为、, 则平面交线→R=×作为流星轨迹的初值. 由地心OECI指向站点与交线最近点S的向量→S作为轨迹位置的初值, 如图4左图所示. 多站观测根据观测透视角Pa的sin2Pa值计算权重Wk, 将平面交线的加权平均作为流星轨迹. 其次, 由视线拟合法进一步确定火流星轨迹, 站点与流星轨迹中每一个观测点连成一束射线(即“视线”), 如图4右图所示. 由相交平面得到的轨迹位置作为初始条件, 计算Ns个站点Nm(k)个测量点所有视线与轨迹位置的角度差之和:
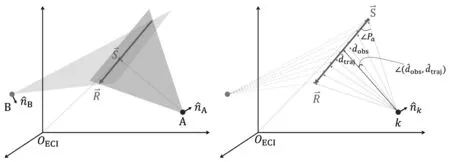
图4 左图: 相交平面法, A、B两个站点及拟合平面. 右图: 视线拟合法, ∠obs, traj为“视线”与轨迹上投影点之间的夹角.Fig.4 Left: the method of intersecting planes, the stations A, B and the fit planes. Right: the method of lines of sight,∠(obs, traj)is the angle between the “line of sight” and the projected point on the trajectory.
其中, 对于k站点第j个测量点,obskj为站点指向流星每个测量点(即“视线”)的方向向量,modkj为“视线”在轨迹上的投影点的方向向量. 最小化Fsum得到新的拟合结果及并将移动至轨迹开始位置作为轨迹参考位置矢量. 为了同步轨迹的动力学特征, 选取最先观测到流星的站点为参考站点, 其时间偏移∆t= 0, 流星体在时间tref(j)内移动距离lref(j). 采用线性插值法求得非参考站点k运动相同距离所需时间tk(lref(j)), 计算时间偏差∆t=tk(lref(j))-tref(j). 最小化所有时间偏差之和Tsum得到∆t的最优解, 更新所有观测点时间重新计算轨迹.
流星体初始进入大气层时无明显减速, 可近似为匀速运动求得初始速度v0. 但初始阶段流星亮度低、测量精度差, 需要逐步增加测量点拟合时间与长度的线性关系. 随着更多观测点加入, 拟合结果的标准差会逐渐降低, 直至流星发生明显减速时标准差会再次增大, 最终取标准差最小值对应的速度作为初始速度.
最后, 采用蒙特卡洛法对上述方法得到的最佳几何解进行参数优化. 计算角度差的标准差作为添加噪声的标准差σ, 向每个原始测量值中添加高斯噪声N(0,σ)重新计算流星轨迹, 并将此过程重复进行n次, 得到n个轨迹解. 取Tsum最小值时对应的轨迹解作为最优解, 此时在几何解的不确定度范围内得到了最佳动力学解.根据ˆR、→S、v0及流星出现时刻计算流星体的开普勒轨道[17].
3 江苏区域火流星监测网
3.1 组网布局
JsRAFN是利用本文监测网系统在江苏地区实地构建的火流星监测原型网. 开展火流星及流星长期监测、数据统计、特征分析、轨迹及轨道计算等工作, 并通过实测数据验证监测网系统的能力.
JsRAFN现已有6个站点运行观测, 站间基线为50–150 km, 所有站点均使用2.2节所述的单站系统, 覆盖江苏及周边约1.0×105km2范围区域. 监测数据在站点及紫金山天文台互为异地备份存储, 数据处理工作主要在紫金山天文台进行. 已部署站点地理位置分布如图5中倒三角标记所示, 站点信息如表1.

图5 JsRAFN的站点分布Fig.5 The station distribution of JsRAFN
3.2 监测网能力分析
根据实测, 监测相机可观测恒星的极限视星等约为+3.0等, 流星约为-1.0等. 2021年9月至2022年10月累计获取流星视频记录6000余条, 其中约50%仅有单站观测记录. 双站或多站关联确定火流星121颗、流星1214颗, 其中双站关联率71.4%、三站关联率23.8%、四站及以上关联率4.8%. 未观测到可以回收陨石的火流星记录.图6给出了JsRAFN观测到流星的辐射点在天球中的分布(地心赤道坐标系, J2000), 火流星以“星形”标注. 颜色栏对应流星的地心速度, 低速流星体(深色)主要分布在黄道附近(图中虚线显示). 辐射点的聚集显示了流星群活动(占总数的46%). 其余在天球上分布较为均匀的为偶发流星, 约占总数的54%. 赤纬-45◦以南的区域由于江苏省地理位置原因难以观测.
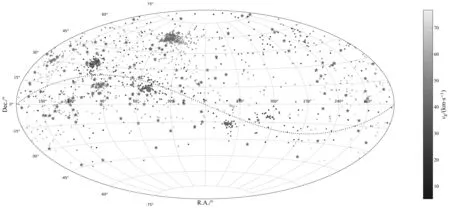
图6 流星辐射点在天球中的分布Fig.6 Distribution of radiation points in the celestial sphere
为了评估不同距离基线上两站的关联比例(关联数/单站记录数), 表2给出了部分基线双站关联比例. 仙林XL、星甸XD、盱眙XY站点间基线距离适中(50–80 km), 仙林-星甸(XL-XD)基线距离最短, 关联比例最高, 达21.3%. 盱眙-星甸(XYXD)基线上两站点天光背景条件较佳, 关联比例可达到21.0%. 而盱眙-仙林(XY-XL)基线上仙林站更靠近城市, 天光背景较差, 导致其关联比例偏低. 苏州-如东(SZ-RD)基线两站之间距离远, 关联比例明显偏低.
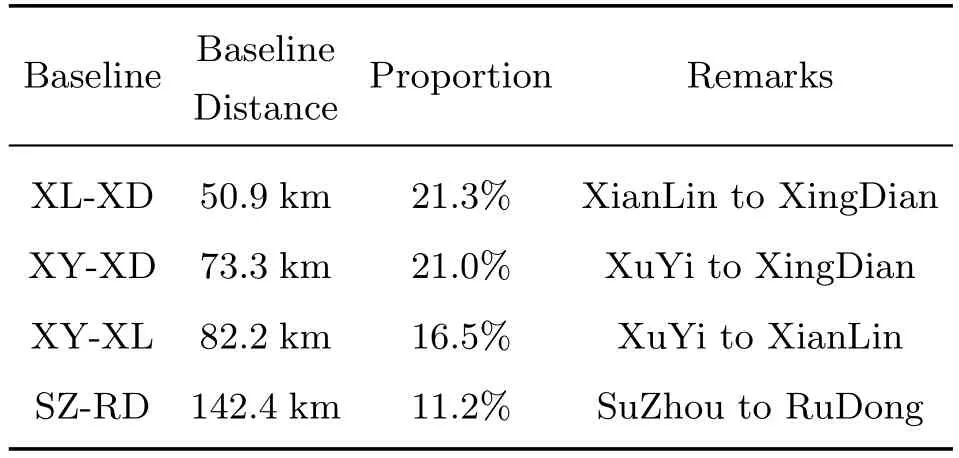
表2 不同基线双站关联比例Table 2 Proportion of association between two stations with different baselines
图7表示2021年9月至2022年10月期间对仙林站、星甸站和盱眙站每月流星数量统计条形图, 从中可见这3个站点每月流星数量统计整体趋势一致,8月、12月流星记录数量明显增多, 主要对应于每年的英仙座和双子座流星群活动. 下半年因为有多个小规模流星群活动, 如南宝瓶座δ、摩羯座α、南/北金牛座、猎户座、狮子座及后发座流星群等,流星数量整体多于上半年.

图7 2021年9月至2022年10月期间仙林站、星甸站和盱眙站每月流星数量统计Fig.7 Monthly number statistics of meteors in XianLin, Xingdian and XuYi stations between 2021 September and 2022 October
图8给出了所有流星绝对星等的直方图, 流星视星等转换为绝对星等的公式为:
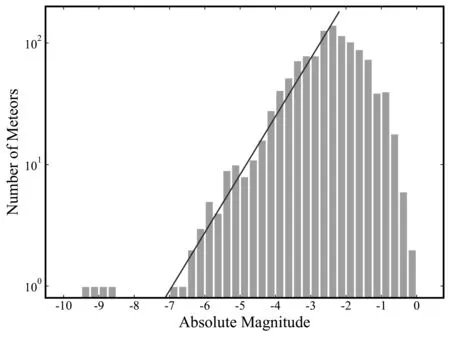
图8 流星绝对星等直方图Fig.8 Histogram of the absolute magnitude of all meteors
Mabs为流星绝对星等,Mobs为视星等,d为流星至站点距离, 单位为km. 由于行星际物质尺寸-数量呈幂律分布, 图8中星等和流星数量对数值Mabs–lgN线的斜率为0.452, 与Halliday等[25]研究得到的斜率0.424接近, 暗于-2.5等的流星数量逐渐偏离Mabs–lgN线, 因此监测网流星绝对星等检测完备度可达-2.5等.
根据流星绝对星等和质量转换公式[26]:
其中vg为地心速度(公式中单位采用cm·s-1),m为流星体进入地球大气层之前的质量. 若取流星体密度为3 g·cm-3, 地心速度为30 km·s-1, 则绝对星等-2.5等的流星体对应直径为1.5 cm. 流星体地心速度越大, 对应可以检测到更小尺寸的流星体.
4 监测网监测数据应用
4.1 火流星定轨
2021年10月2日18:29:52.8 (UTC) JsRAFN监测网监测到火流星JsFB20211002, 仙林站、星甸站和盱眙站同时记录到该事件, 上海地区天文爱好者也提供了该事件的观测数据, 分析结果如图9所示, 图9 (a)是仙林站的监测图像. 表3给出了轨迹拟合结果和轨道. 轨迹的空间残差小于200 m, 如图9(b)所示. 轨道参数表明这颗火流星轨道类似Aten型近地小行星, 轨道示意图如图9 (c). 火流星的亮度曲线特征在相同时刻重合, 如图9 (d)所示, 其中星甸站的亮度偏差是由于外壳结露导致. 火流星在1.7 s发生第一次空爆, 对应高度约56 km, 第二次空爆发生在3.3 s, 对应高度约36 km, 最后一次空爆发生在事件末端3.8 s, 对应高度约32 km, 分别对应图9 (a)和(d)中A、B、C所示.
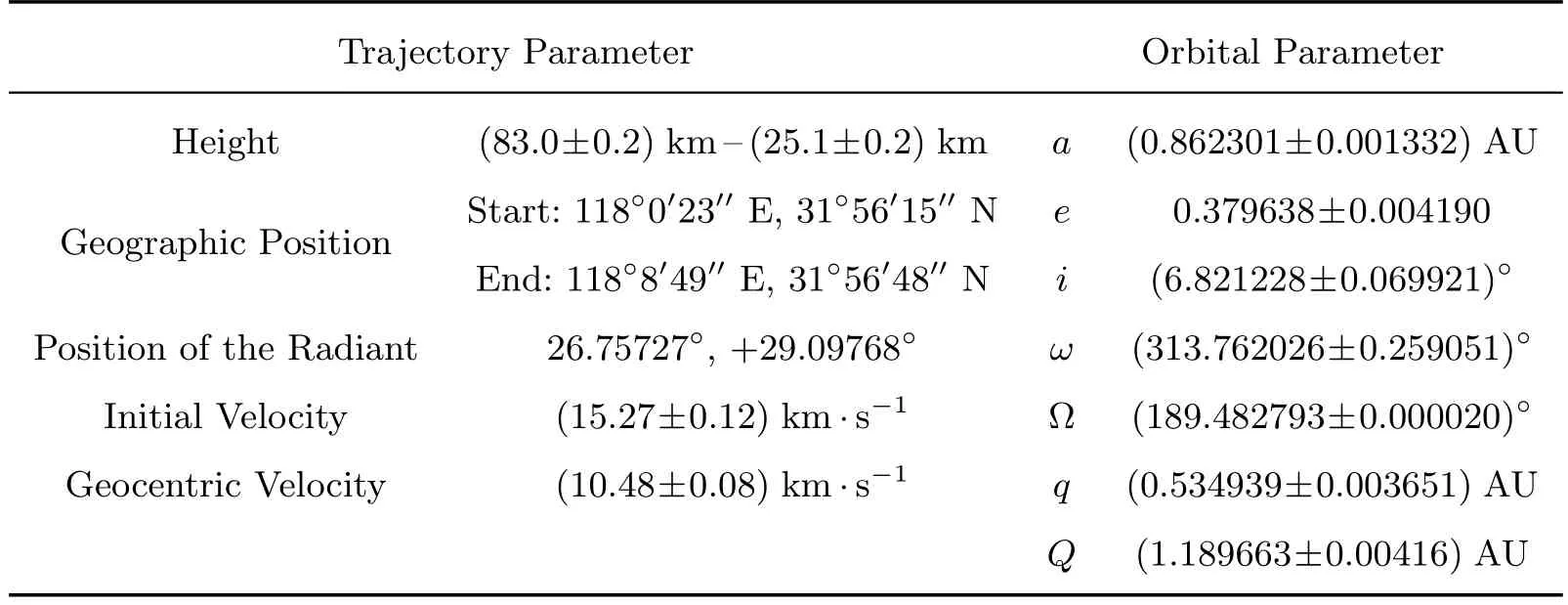
表3 火流星JsFB20211002最佳拟合轨迹解和轨道Table 3 Best-fit trajectory and orbit for fireball JsFB20211002
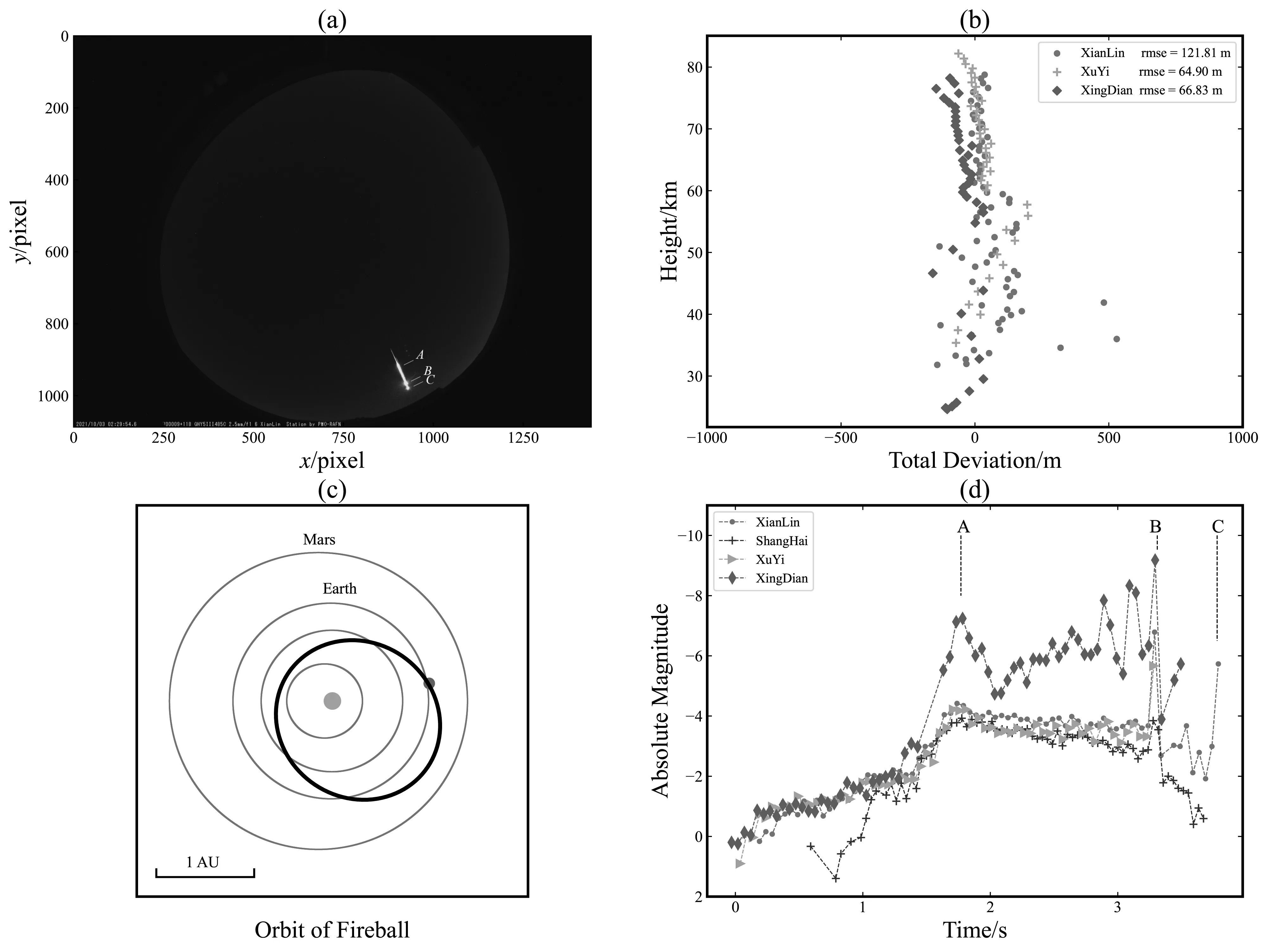
图9 火流星JsFB20211002数据分析结果. (a)仙林站监测图像, (b)轨迹空间残差, (c)火流星轨道示意图, (d)火流星亮度曲线.Fig.9 Data analysis results of the fireball event JsFB20211002. (a) Fireball image by Xianlin Station, (b) spatial residuals of the trajectory, (c) plot of the fireball orbit, (d) light-curve of the fireball.
4.2 火流星通量估算
根据气象资料, 江苏省及周边长三角区域年平均云量约60%[27], 监测网一年有效观测时间可估算为1752 h (假设一年时间中白天占比50%,且60%时间被云层遮挡), 目前可覆盖范围约1.0×105km2, 则每年可以获得约1.752×108km2·h的观测. 计算得到质量40 g、直径3 cm的火流星通量为2.68×10-7km-2·h-1, 与Halliday等人给出的2.50×10-7km-2·h-1接近. 图10中菱形点给出了JsRAFN网所有流星监测数据得出的通量, 实线为1996年Halliday等人利用加拿大陨石观测及回收项目(Meteorite Observation and Recovery Project, MORP)经过十年的火流星观测结果得出的通量[25].

图10 JsRAFN监测网流星体通量与Halliday等人结果[25]对比Fig.10 Comparison of JsRAFN network meteoroid flux with the results of Halliday et al.[25]
4.3 流星群活动监测
将流星轨道数据与IAU流星群数据库进行对比, 根据观测时刻太阳经度、日心黄道坐标系中辐射点坐标、地心速度, 将符合偏差阈值的流星归类为相应流星群属. 结果显示: 总共检测到246颗英仙座流星群流星(PER), 42颗南宝瓶座δ流星群流星(SDA), 42颗双子座流星群流星(GEM), 37颗南金牛座流星群流星(STA), 15颗摩羯座α流星群流星(CAP)以及监测数量较少的猎户座(ORI)、水瓶座(ETA)、后发座(COM)、长蛇座(HYD)、波江座(ERI)、狮子座(LEO)等流星群流星.
我们采用Jenniskens等人在文献[28]中提供的对比方法, 计算流星群各轨道参数的中值与其母体进行比较, 结果如表4所示. 对比结果与文献[28]结果相符, 表中所列太阳经度、辐射点坐标及轨道参数与母体参数接近. 对于母体为长周期彗星的流星群, 其轨道偏心率大、a更离散且与母体的轨道半长径偏差较大, 而非周期彗星产生的流星体的a则无意义, 因此选取q和e两个轨道根数进行比较.

表4 群流星轨道参数与母体轨道参数对比Table 4 Comparison of orbital parameters of meteor streams with their parent bodies
4.4 流星轨道类型分析
根据所有轨道结果, 我们对流星轨道类型进行了分析. 图11分别给出了所有流星、偶发流星、群流星地心速度分布直方图以及流星体轨道半长径倒数的分布, 由图可知: (1)流星体可以分为两类,小行星来源的慢速流星体及海外天体(trans-Neptunian object, TNO)或长周期彗星来源的高速流星; (2)小行星来源的流星体1/a分布的峰值对应3:1轨道共振, 即近地小行星的起源, 而TNO或彗星来源的小行星1/a分布的峰值对应海王星轨道及1/a值接近零处. 图中显示出一些1/a <0的流星体, 我们认为这部分是由于时间分辨率不够或数据分析中对初始速度的计算存在误差导致的.
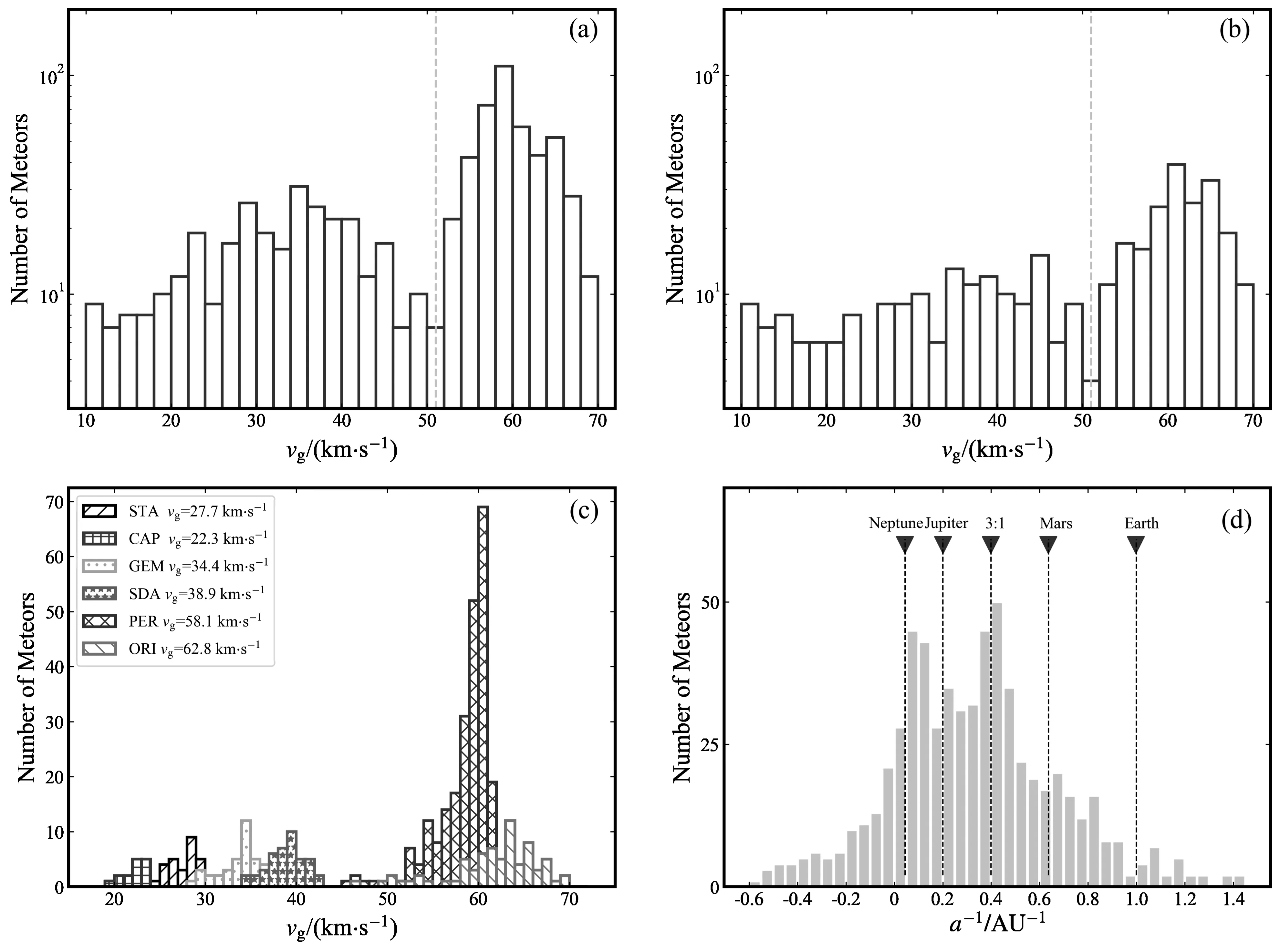
图11 (a)所有流星地心速度分布; (b)偶发流星地心速度分布; (c)群流星地心速度分布对比; (d) 1/a分布.Fig.11 (a) Distribution of geocentric velocities of all meteors; (b) distribution of geocentric velocities of sporadic meteors; (c)distribution of geocentric velocities of meteoroid groups; (d) distribution of 1/a.
根据Jopek等[29]提出的双参数彗星-小行星分类方法, 采用Q-i准则进行分类, 彗星轨道满足:
其余为小行星轨道. 表5为本文JsRAFN监测网和全球主要流星监测网轨道分类结果对比. 其中EDMOND和GMN数据涵盖的站点分布于多个国家和地区, 具有广域性特点, 而UKMON和Sonota-Co网分别为英国和日本单个国家区域性覆盖, 所有监测网均有站点分布均匀、样本数量充足的特点,具有可靠参考性.
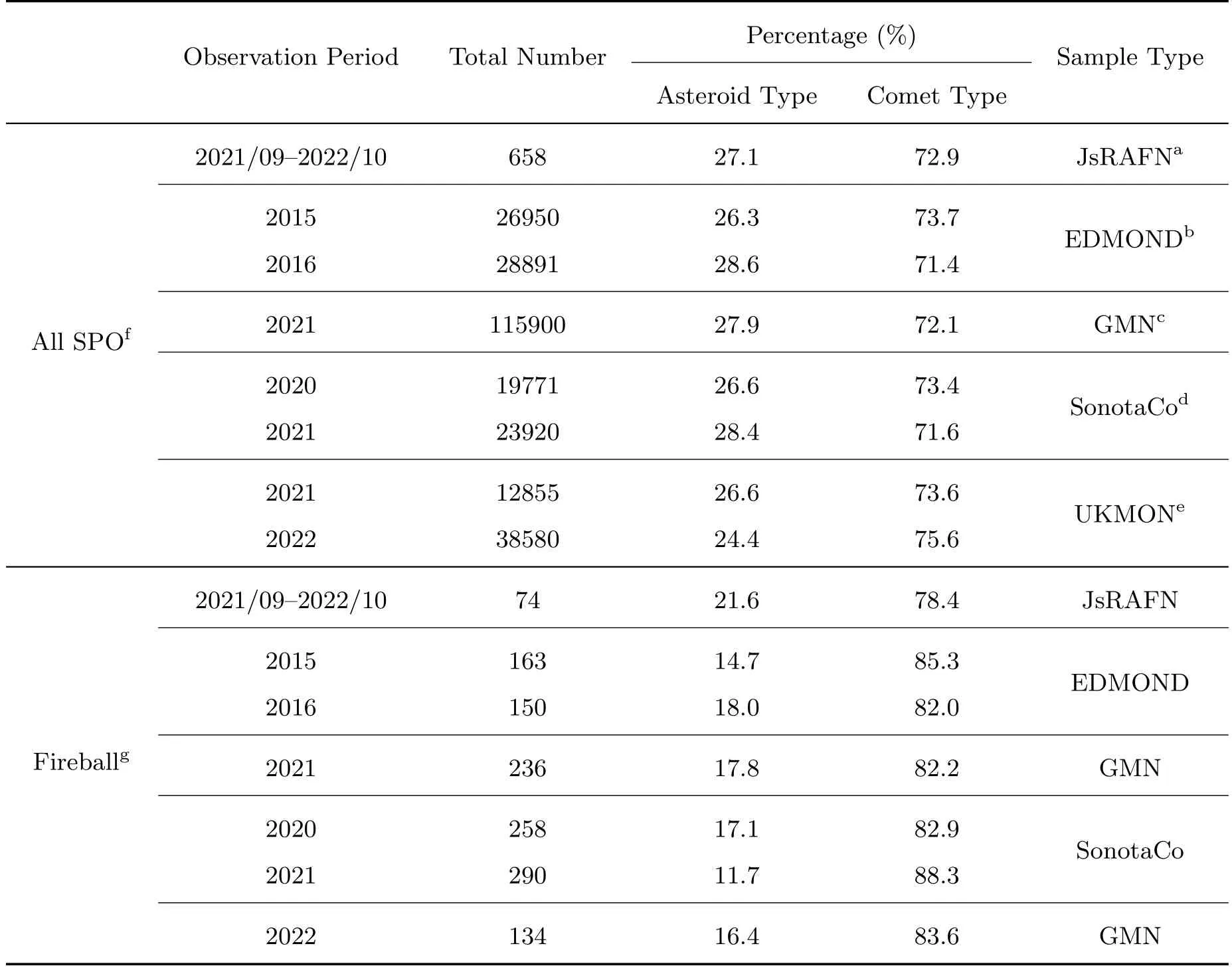
表5 JsRAFN网与全球主要流星监测网偶发流星轨道分类对比Table 5 Comparison of the sporadic meteor orbit classification between JsRAFN and the major globalmeteor monitoring networks
由表5结果可知: (1)各监测网数据库的比例分布显示, 类彗星轨道的流星占主导地位, 亮度更高的火流星中类彗星轨道的比例更高, 原因可能是彗星起源的流星体速度较高, 导致相同尺寸的流星体进入大气层后其亮度更高; (2)由JsRAFN监测网数据给出的类近地小行星轨道和类彗星轨道的比例分别为27.1%和72.9%, 与其他流星监测网轨道分类结果相一致; (3)在JsRAFN监测网数据中, 火流星轨道分类比例较其他监测网比例结果略有偏差, 我们认为其原因是一年的样本数量较少, 对于该分布的统计特性没有完全展现.
类近地小行星轨道可再分类为类Aten型及类Apollo型轨道, 分类结果如表6. 所监测流星中类Apollo型轨道超过95%, 类Aten型数量很少.

表6 类近地小行星轨道分类Table 6 Classification of asteroid orbit types
5 总结和讨论
本文基于多站布局的全天视频相机组网监测系统, 在江苏及周边构建了一个区域级原型系统,实现了火流星监测组网控制、视频数据采集、数据处理及流星体定轨的完整流程. 在江苏区域火流星监测网实际应用中, 总共确定了121颗火流星及1214颗流星, 双站、三站及三站以上确定流星比例分别为71.4%、23.8%和4.8%.流星视星等监测极限约为-1.0等, 绝对星等检测完备度可达-2.5等,能够达到完备地监测所有火流星的要求, 充分利用监测数据还可开展常规流星、流星群监测. 径向基函数神经网络在天体测量校准中体现出了简便、快捷的优势, 并能满足定位精度. 但由于流星距离远、观测仰角低引起的坐标测量误差, 不会在轨迹计算过程中得到改善, 将直接影响轨迹计算结果.可通过降低该站点的权重减小其影响, 或适当增加站点密度缩短站间基线来改善此问题.
以火流星事件JsFB20211002为例展示了轨迹、轨道计算结果, 其轨道类似Aten型近地小行星, 轨迹空间残差小于200 m, 火流星发生的三次空爆在监测图像和光度曲线中相匹配. 首先, 我们计算得到了大于40 g (对应直径3 cm)的火流星通量为2.68×10-7km-2·h-1, 结果与其他流星监测网的报告一致; 其次, 获得了所有双站(及多站)关联流星的轨迹和轨道结果, 可识别出多个流星群活动, 识别结果符合对应流星群及其母体的相应特征. 最后, 本文对所有偶发流星轨道进行分类, 分析了流星体的两个主要来源, 分别为小行星来源和彗星来源. 类小行星轨道与类彗星轨道比例分别为27.1%和72.9%, 而火流星呈现出彗星起源比例更高的总体趋势. 此外, 进一步对类近地小行星轨道分类, Aten型近地小行星的轨道特点使得类Aten型轨道的流星体数量非常少.
江苏区域火流星监测网目前站点数量较少, 站间基线存在一定差异,监测网系统完备性尚有不足.与国际主要流星监测网的统计数据对比: 在火流星轨道分类比例、类Aten/Apollo型分类比例等方面由于样本数量较少, 统计结果略有偏差; 但在多站数据关联比例、火流星通量估计、流星群检测及偶发流星轨道分类等方面具有较好的一致性. 对比结果验证了基于全天相机组网实现的区域火流星视频监测网系统在实际组网使用中的检测效率, 并能达到统计信息测量的效能要求.
致谢感谢紫金山天文台盱眙观测站的洪仁全, 南京天文爱好者协会许军、成炳峰及苏州市天文学会孙霈源在站点建设及日常维护中提供的支持. 感谢上海天文爱好者邵淳提供火流星的观测数据. 感谢审稿人对文章提出的宝贵建议, 使得文章的质量有了显著的提高.