基于改进灰狼优化的开关磁阻风力发电最大功率点跟踪控制策略
2023-10-09李红伟明兴莹罗华林亢庆林林军木
李红伟, 明兴莹*, 罗华林, 亢庆林, 林军木
(1.西南石油大学电气信息学院, 成都 610500; 2.四川署信驱动科技有限公司, 成都 611731)
随着中国步入“十四五”发展阶段,风能作为一种丰富的可再生能源,得到了越来越多的重视和利用[1]。
开关磁阻发电机(switched reluctance generator,SRG)作为一种新型特种发电机[2],采用双凸极结构,内部无永磁体,绕组仅集中在定子上,所以SRG结构简单,可靠性高,没有去磁效应,适用于环境恶劣的风电场合[3]。SRG输出的是恒压直流电,在并网时没有电流冲击,可直接用于直流负载或蓄电池供电,也可调节并网无功功率。但由于SRG控制系统开关器件容量较大,容易出现转矩波动,且在风力发电过程中,由于风能的不确定性,风力机转速的突变会引起输出电压的脉动,从而影响SRG的发电质量,无法准确快速地实现最大功率点跟踪(maximum power point tracking,MPPT)[4]。
为提高SRG发电质量,减小输出电压脉动,实现开关磁阻发电机的最大功率点跟踪控制,中外学者提出了很多优化方法。文献[5]证明了开关磁阻发电机应用脉宽调制(pulse width modulation,PWM)控制,在转速变化范围大以及中小功率场合有特殊优势,但并未考虑风力发电领域的实际工况,应用过程中存在较大偏差。文献[6]提出了一种变励磁电压的MPPT控制方法,通过单神经元控制算法输出励磁电压,实现MPPT控制,虽然该方法能够实现最大功率点跟踪,但学习效率因子整定困难,导致输出电压波动较大。文献[7]提出一种动态滑膜控制来实现MPPT,但在变风速下难以快速选取最优控制律,导致达到滑模面时间较长,系统响应速度较慢。文献[8]提出一种混沌粒子群优化神经网络对SRG进行建模分析,混沌粒子群算法泛化能力很强,可以较好地表达开关磁阻发电机的非线性特性,但该粒子群算法在频繁变化的风速下搜索速度变慢,容易陷入局部最优。
近年来,智能群优化算法被广泛应用于解决非线性工程问题,具有较好的应用前景[9]。现进一步将智能群优化算法中的灰狼优化算法(grey wolf optimization,GWO)应用到开关磁阻风力发电系统MPPT控制,通过输出电压脉宽调制最优占空比,实现开关磁阻风力发电系统的MPPT控制并优化输出电能质量。
1 开关磁阻风力发电系统工作原理
1.1 风力机MPPT数学模型
由Betz定理[10]可知,水平轴风力机的输出机械功率为
(1)
式(1)中:ρ为空气密度,kg/m3;v为风速, m/s;S为风轮的扫风面积, m2;Cp为风能利用系数,它是风轮叶尖速比λ与风轮桨距角β的非线性函数,而叶尖速比λ为风力机转速与风速v之比[11],即
(2)
式(2)中:n为风力机的转速, r/min;R为风力机的半径, m。
如图1所示,在不同风速下,假设风力机桨距角不变,通过调节开关磁阻发电机的转速达到最佳转速nopt,使得风力机保持在最佳叶尖速比λopt,则可实现开关磁阻风力发电系统最大功率点跟踪,这就是开关磁阻风力发电系统转速闭环PID控制的基本目标[12]。但由于实际使用场景中,风速的突变以及开关磁阻发电机的非线性特性,传统PID算法的MPPT控制参数整定较慢、鲁棒性差,难以在风速频繁变化时保证输出电能的质量以及最大功率点跟踪。
1.2 开关磁阻电机发电运行原理
开关磁阻电机发电运行的分析方法与电动运行的情况类似[13],假设忽略铁耗,则根据能量平衡原理得到如下的微分方程,即
dW=dWm+dWe
(3)
式(3)中:W为风力机输入的机械能;Wm为磁场储能;We为输出的电能。
由于磁场储能Wm=Wm(i,θ)且ψ=ψ(i,θ),则可以得出
(4)
式(4)中:i为绕组电流;θ为转子旋转角度;ψ为磁链;Tem为电磁转矩。
假设绕组电阻不计[14],则发电机的电压方程为
(5)
式(5)中:e为感应电动势;L为电感;ω为转子角速度;+U为励磁阶段电压;-U为发电阶段电压;Ei为变压器电势;Eω为运动电势。
在发电机电压方程式(5)两端都乘以i,得出发电机的功率平衡式[15]为
(6)
2 灰狼优化算法MPPT发电控制
开关磁阻风力发电系统MPPT控制如图2所示。根据实时风速以及所采用风力机对应的最佳叶尖速比值[16],计算出SRG的最佳转速,与SRG实时转速作差比较[17],使用自适应权值灰狼优化算法进行PID参数整定,输出电压脉宽调制中的最优占空比,控制功率变换器中相应开关器件的开通与关断[18],从而实现开关磁阻发电系统MPPT控制的快速性和稳定性。

图2 开关磁阻发电机MPPT控制框图
2.1 灰狼优化算法
灰狼优化算法[19]是由澳大利亚学者提出的一种群智能优化算法,它通过将灰狼种群分级的方式,对猎物实施包围和捕猎,实现高效捕杀猎物。
GWO算法中每一个灰狼都是种群的一个可行解,将α狼的位置作为最优解,在捕食猎物时,种群里的其他灰狼个体在最优解α狼的带领下有组织地对猎物进行围攻,并且将β狼的位置作为优解,将δ狼的位置作为次优解;而ω狼的位置作为剩余的可行解[20]。灰狼狩猎时需要首先包围猎物,用数学模型表示为
S=|CXp(t)-X(t)|
(7)
X(t+1)=Xp(t)-AS
(8)
式中:S为灰狼与猎物之间的距离;Xp为目前猎物的位置;X为目前灰狼的位置;t为当前的种群迭代次数;A和C都为灰狼种群协同系数,计算过程为
A=2ar1-a
(9)
C=2r2
(10)
式中:A为收敛系数;a为收敛因子在灰狼种群迭代过程中线性地从2减小到0;C为随机系数;r1、r2为[0,1]中的随机数[21]。
在一个未知的猎物搜索空间中,灰狼并不知道最优解的精确位置[22]。所以为了更加真实地模拟灰狼的捕猎行为,假设α狼、β狼和δ狼都有猎物潜在位置的经验知识,在每次灰狼种群迭代过程中,始终保存迄今为止获得的3个最优解,使得其他狼可以根据历史最优搜索的位置[23]采用式(11)和式(12)更新它们的位置。
(11)
(12)
式中:S为与其他灰狼个体的距离;X为ω狼朝着α狼、β狼和δ狼前的步长和方向。
改进灰狼优化算法的计算步骤[24](图3)如下。
步骤1设置KP、KI、KD的上下限,在此区间内对灰狼个体进行初始化,包括种群数量N,最大迭代次数tmax,参数a、A、C,灰狼个体的位置Xi(KP,KI,KD)。
步骤2根据式(12)计算每头灰狼个体的适应度值,并将适应度最优的前3个灰狼个体设置为α狼、β狼和δ狼。
步骤3根据位置更新式(11)和式(12),更新灰狼个体Xi的位置。
步骤4更新参数a、A、C。
步骤5判断是否达到最大种群迭代次数tmax,若达到最大种群迭代次数,则停止运算并返回最优解Xα;否则返回步骤2。
输出最优解α狼的位置向量Xα(KP,KI,KD)作为PID控制器的最佳控制参数[25]。
2.2 基于改进灰狼优化的自适应PID调节器设计
将PID控制的3个参数KP、KI、KD组成灰狼个体的三维位置向量X=(KP,KI,KD),每次迭代适应度最优的前3个解分别作为α狼、β狼、δ狼引导其余灰狼个体进行位置更新,进而逼近最优解[26]。
采用改进的自适应加权灰狼优化PID算法(adaptive weighted grey wolf optimization proportion integration differentiation,AWGWO-PID)实现MPPT控制,由开关磁阻发电机转速实际值与最优指令值的偏差来控制开关管的PWM触发脉冲信号改变脉宽调制占空比D,经图4所示的自适应加权灰狼优化PID控制算法得到。

K为比例系数;ΔD为脉宽调制占空比及其增量;Z-1为占空比上一时刻离散值
(13)

(14)
自适应加权灰狼优化PID算法的输入信号 、 经图4所示的状态变换环节,根据增量式PID控制将偏差变换为灰狼优化算法所需的位置状态变量X,即
(15)
而改进灰狼优化PID算法的输出增量即输出为
(16)
式(16)中:D、ΔD分别为SRG相电压脉宽调制占空比及其增量;K为自适应加权灰狼优化PID控制的比例系数;W1、W2、W3分别为α狼、β狼、δ狼对灰狼个体位置更新的影响权值,即式(15)所示状态变量X的权值(i=1,2,3),其按式(17)所示的改进灰狼优化位置更新机制进行在线调整,即
(17)
式(17)中:f1、f2、f3分别为α狼、β狼、δ狼的适应度。
最终,灰狼个体的位置更新公式为
(18)
上述影响权值能够根据实际风速动态变化,加入后可以避免灰狼优化算法陷入局部寻优,加快收敛速度,提升算法寻优性能。
3 仿真试验与分析
3.1 开关磁阻发电机本体建模
采用查表法[27]建立开关磁阻发电机非线性模型,利用Ansys Maxwell电磁仿真软件,建立SRG有限元模型,如图5所示。通过RMxprt模块建立SRG本体模型,通过对铁芯叠长、绕组匝数、定转子极弧系数、轭高等进行参数化分析[28]得到优化后的SRG结构参数如表1所示。

表1 开关磁阻发电机相关参数
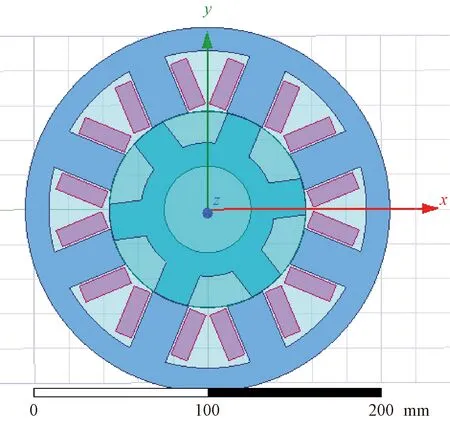
图5 开关磁阻发电机本体模型
然后通过Rxmprt与Maxwell联合仿真,进行静态磁场参数化分析,导出磁链电流角度和转矩电流角度的数据,如图6和图7所示。

图7 转矩-电流-角度关系图
3.2 开关磁阻风力发电系统非线性建模
把上述数据导入Simulink-2D查表模块,建立四相8/6极开关磁阻风力发电系统非线性参数模型[29],如图8所示,分别进行风速阶跃变化和风速渐变情况下[30]的系统仿真来验证前述的基于自适应加权灰狼优化PID算法的MPPT控制的运行效果。
图9~图12所示为风速阶跃变化情况下,分别采用传统PID控制与AWGWO-PID控制下系统MPPT性能仿真结果对比。系统开始工作时的外界风速为6 m/s;在1.5 s时外界风速由6 m/s阶跃下降为4 m/s;在3.5 s时外界风速由4 m/s阶跃上升为7.5 m/s。仿真结果如表2所示:无论风速阶跃上升还是下降,开关磁阻发电机在AWGWO-PID控制下,相较于传统PID控制,大大缩短了SRG转速和输出功率达到最优指令的时间,并且转速波动和输出功率波动进一步降低。

表2 阶跃风速下不同控制方法性能参数

图9 阶跃风速下传统PID控制SRG转速跟踪

图10 阶跃风速下AWGWO-PID控制SRG转速跟踪
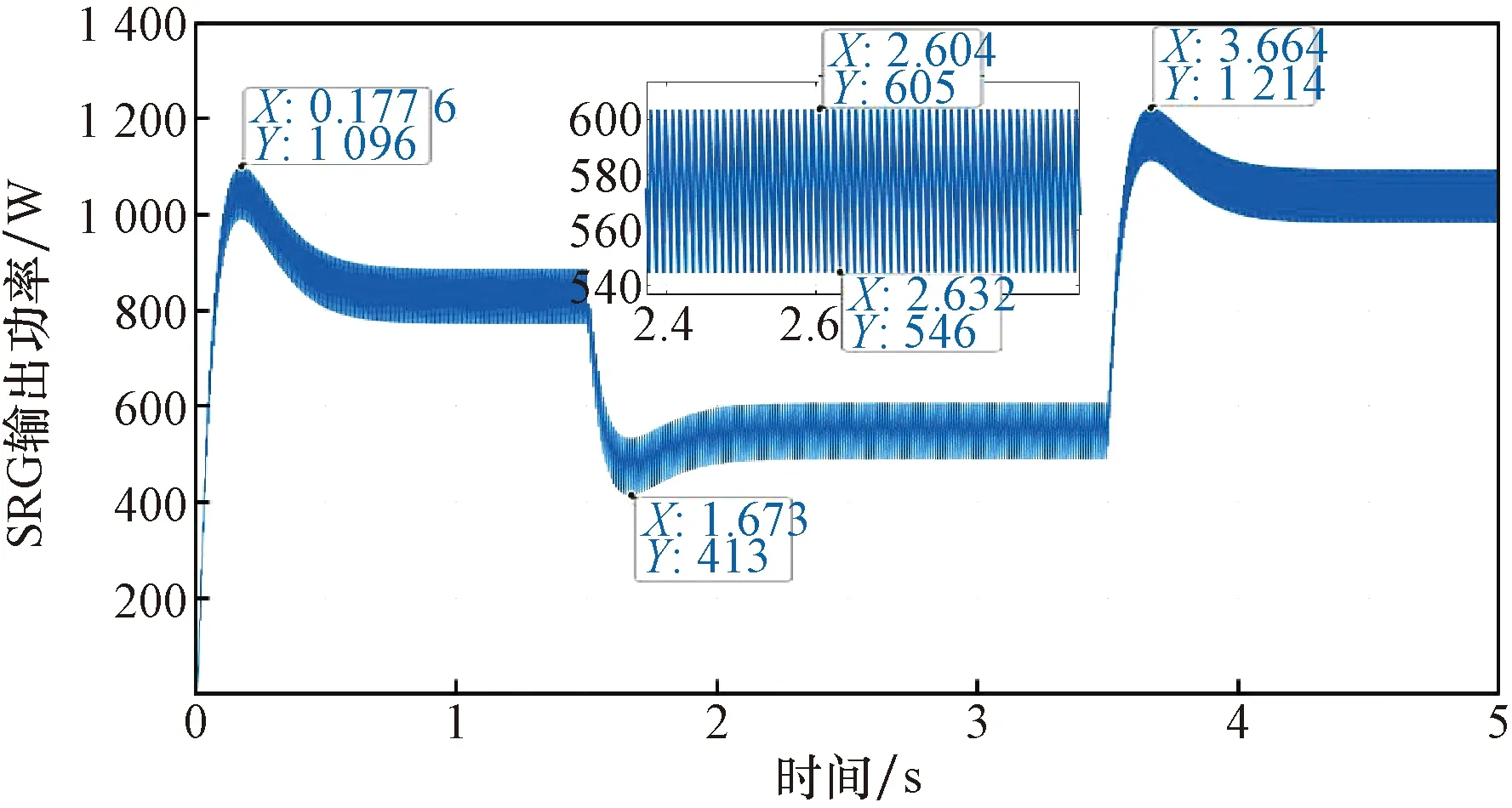
图11 阶跃风速下传统PID控制SRG输出功率
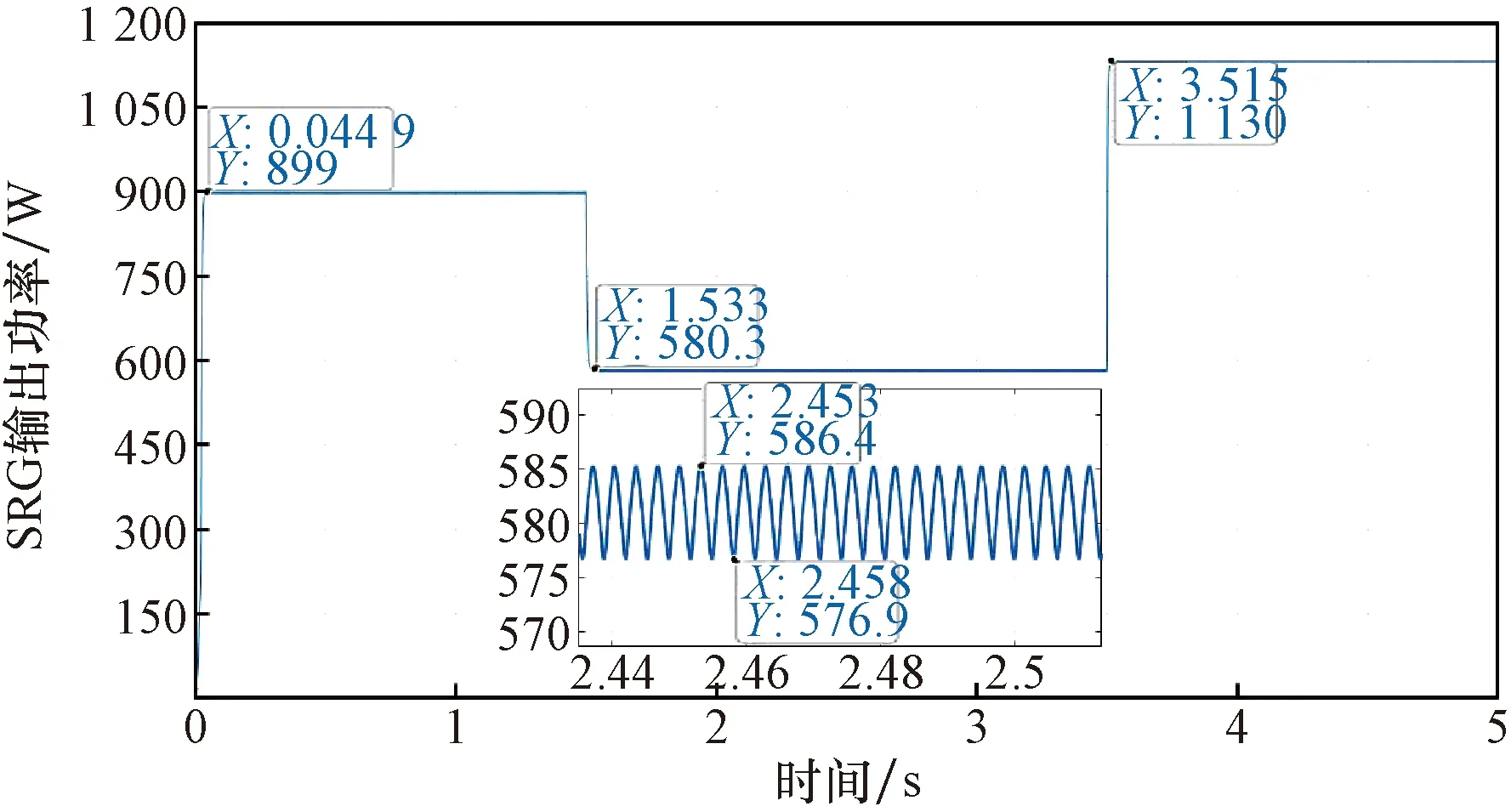
图12 阶跃风速下AWGWO-PID控制SRG输出功率
图13~图16所示为风速渐变情况下,分别采用传统PID控制与AWGWO-PID控制下系统MPPT性能仿真结果对比。系统开始工作时的外界风速为8 m/s;在1.5 s时外界风速以2 m/s2的加速度逐渐上升,到3.5 s时外界风速升至12 m/s并保持不变。仿真结果如表3所示:在风速渐变情况下,SRG系统仍能够快速稳定跟踪最优转速指令,以较快的响应速度和较高的跟踪精度实现MPPT。

表3 渐变风速下不同控制方法性能参数

图13 渐变风速下传统PID控制SRG转速跟踪
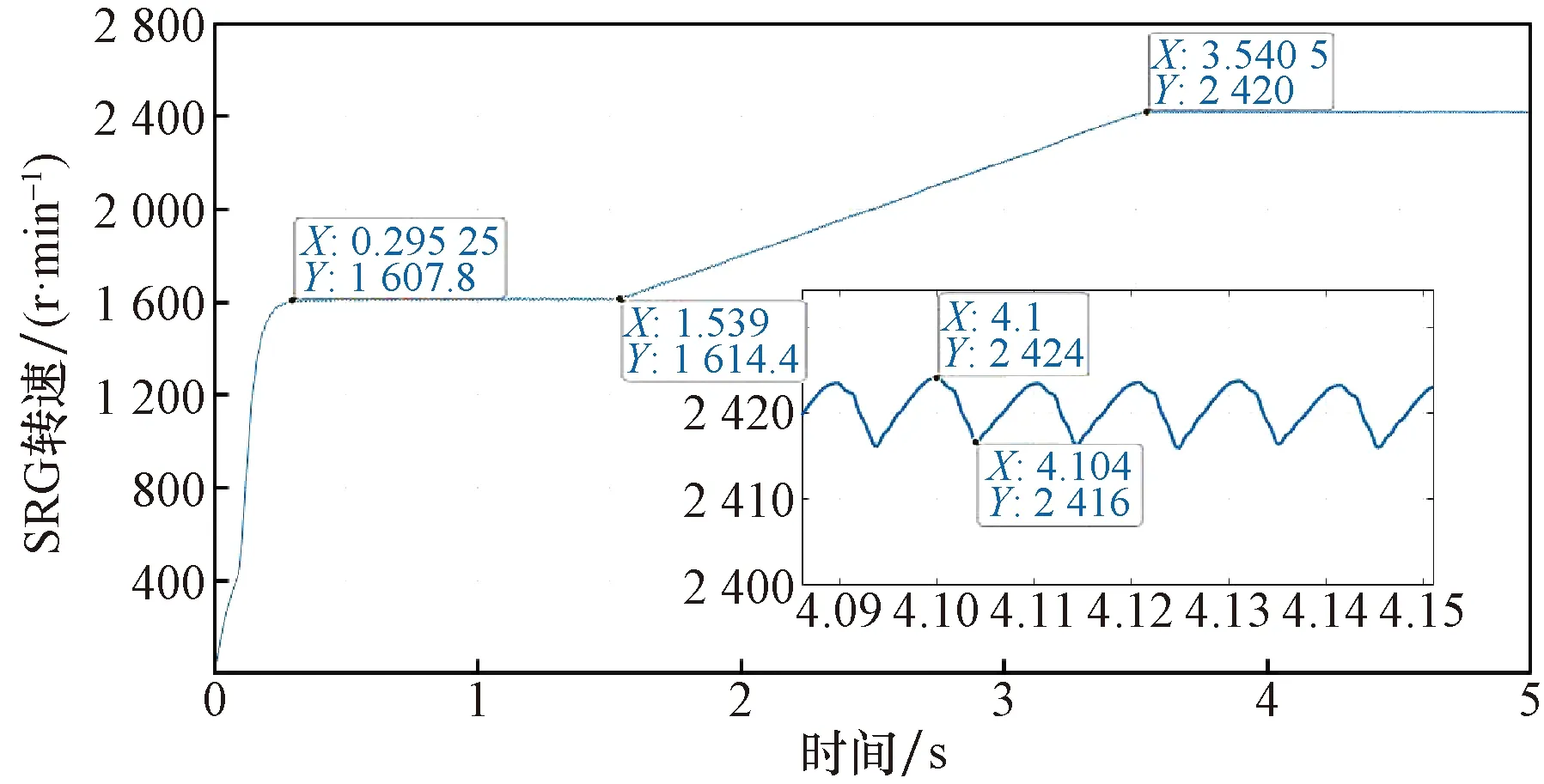
图14 渐变风速下AWGWO-PID控制SRG转速跟踪
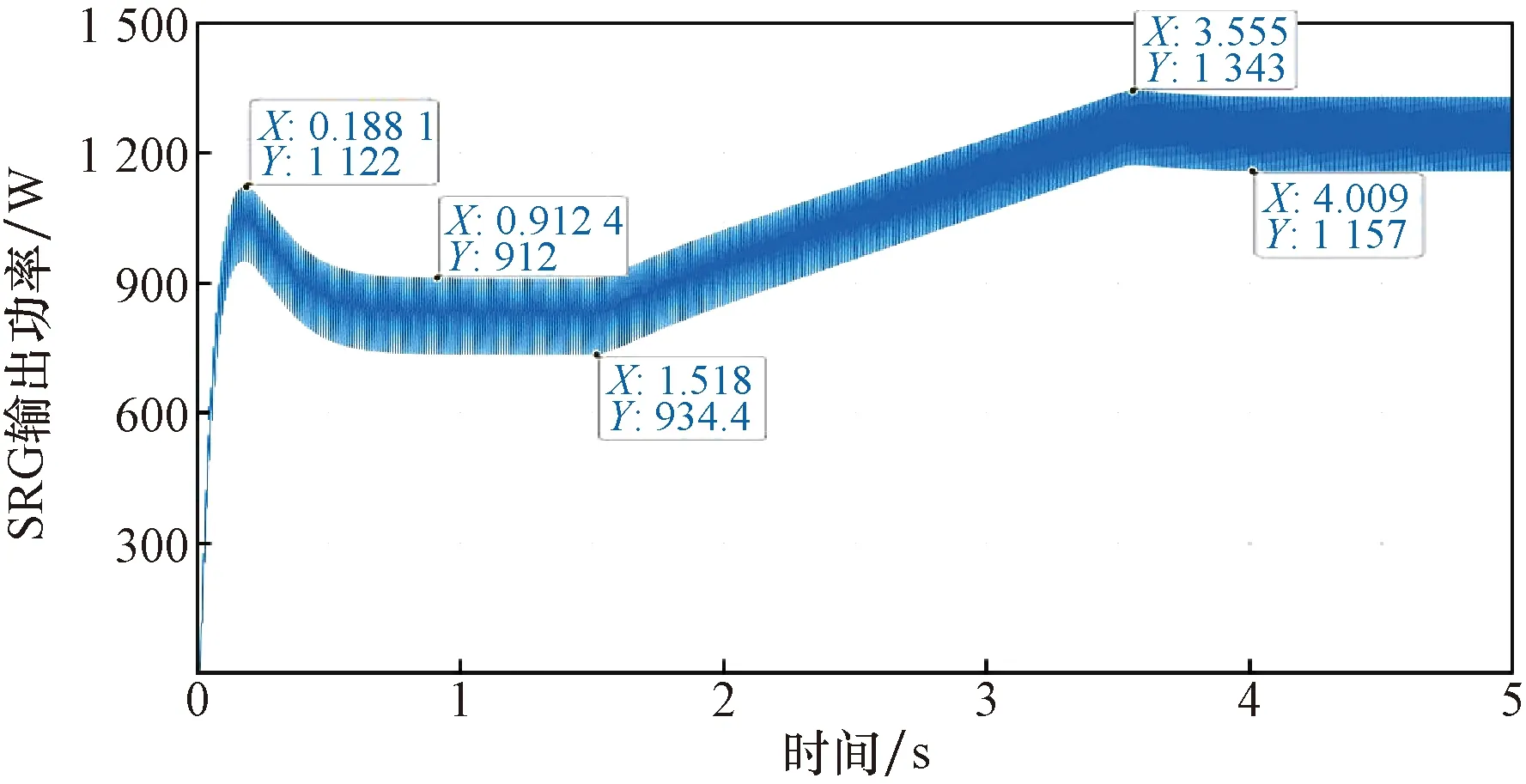
图15 渐变风速下传统PID控制SRG输出功率
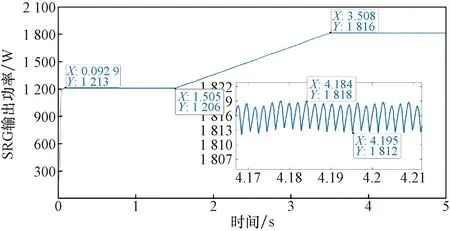
图16 渐变风速下AWGWO-PID控制SRG输出功率
4 结论
针对风速频繁变化的使用场景和需求,开展了开关磁阻风力发电系统最大功率点跟踪控制的研究,利用Ansys建立了开关磁阻发电机有限元仿真模型,将有限元仿真得到的转矩和电感参数导入MATLAB/Simulink建立基于自适应加权灰狼优化PID算法的SRG风力发电系统模型,并进行对比仿真试验,得到如下结论。
(1)改进的自适应加权灰狼优化PID算法能够实现全局搜索和快速寻优,准确输出SRG脉宽调制最优占空比,快速达到最优转速。
(2)无论风速阶跃上升还是下降,改进灰狼优化PID算法的SRG控制系统均能够稳定跟踪最优转速指令,使系统能够以良好的动静态性能实现最大功率点跟踪。
(3)在外界风速渐变情况下,系统仍能够以较快的响应速度和较高的跟踪精度实现最大功率点跟踪,并且减小了跟踪转速波动和输出功率波动,具有较好的鲁棒性。
