基于无人机倾斜摄影技术的桥梁有限元逆向建模方法研究
2023-10-08周云刘鹏郝官旺朱正荣潘恒李剑
周云 ,刘鹏 ,郝官旺 ,朱正荣 ,3,潘恒 ,李剑
[1.工程结构损伤诊断湖南省重点实验室(湖南大学),湖南 长沙 410082;2.湖南大学 土木工程学院,湖南 长沙 410082;3.长沙市建设工程质量安全监督站,湖南 长沙 410016;4.中建三局第一建设工程有限责任公司,湖北 武汉 430020]
桥梁有限元模型在结构健康监测[1]、抗震分析[2]、事故分析[3]等方面应用广泛.在实际工程中,由于桥梁年久失修、图纸丢失[4]、图纸权限及保密原因,研究人员难以获得目标桥梁的设计图纸,或桥梁在进行突发事故和区域抗震分析时,需要短时间内高效建立有限元模型[5],因此需要提出一种快速可靠的桥梁逆向有限元建模技术.
近年来点云扫描与处理技术发展迅速,以此为基础的结构数字化建模也受到了越来越多的关注,并得到广泛的应用[6-8].结构数字化建模是从结构实体快速获取三维几何数据实现结构数字模型重新构建,目前常用的方法有基于图像的建模方法(Image-Based Modelling,IBM)和基于范围的建模方法(Range-Based Modelling,RBM)[9].IBM 方法是基于相机或无人机等被动传感器获取结构多视角序列影像,使用运动恢复结构(Structure form Motion,SfM)和多视图立体匹配算法(Multi-View Stereo,MVS)提取结构尺寸数据,建立结构数字模型[10-12].IBM 方法成本较低,但受天气因素影响大,精度较低.RBM 方法是利用三维激光扫描仪(Terrestrial Laser Scanner,TLS)等主动传感器扫描目标建筑,获取目标建筑点云模型,再对点云进行优化和处理以建立结构数字模型[13-14].RBM 方法精度较高,受外界影响小,但成本也更高,适用性受到限制.
随着结构数字化建模技术的发展,桥梁有限元逆向建模技术也受到了越来越多的关注,桥梁有限元逆向建模是在项目竣工后,对工程实物进行3D扫描、数据采集等工作,再通过数据处理和三维重建等过程,得到具有相同设计参数的有限元模型.国内外学者围绕桥梁有限元逆向建模开展了一系列研究.Conde-Carnero 等[15]使用TLS 建立了一座高架桥和人行桥的点云模型,依此重建了桥梁的有限元模型并进行了结构分析;Lubowiecka 等[16]使用TLS 提取了一座砌体结构桥梁的几何数据,使用探地雷达确定了桥梁的材料组成,进而重建桥梁有限元模型;Bautista-De 等[17]对一座钢筋混凝土桥使用了地面激光扫描、环境振动测试、结构材料试验、数值模拟等多学科方法精细地建立了桥梁有限元模型;Pepe 等[9]使用无人机和相机建立了一座两跨石拱桥的三维点云模型,基于工业基础类标准定义材料本构,进而重建桥梁有限元模型;Batar 等[18]使用TLS 建立了一座历史拱桥的点云模型,采用混凝土损伤塑性材料模型定义材料本构,进一步重建桥梁有限元模型.
目前开展的桥梁有限元逆向建模存在成本较高及结构内部细节信息不明确的问题.当前开展的研究主要是基于TLS 建立结构点云模型,进而建立有限元模型.这种方法多用于房屋建筑和非水域桥中,虽然准确,但是激光扫描仪价格昂贵,适用性受限.对于内部信息,国内外学者通过高度假设[15,19-21]、采用精密仪器检测[16]、实验室检测[17]以及利用工业基础类标准获取[9].然而,这些方法存在依赖假设较高,无法反映结构内部真实信息,或者成本较高导致适用性较低的问题.针对以上问题,本文引入了倾斜摄影技术、大数据及专家先验信息,有效解决在水域桥中逆向建模难、内部信息不明确的问题.
本文将对桥梁有限元逆向建模技术开展研究,利用无人机倾斜摄影技术重建目标桥梁三维实景模型.已有研究表明,倾斜摄影技术精度满足工程要求[22],可达±3.4 cm.使用非均匀有理B 样条技术(Non-Uniform Rational B-Splines,NURBS)拟合桥梁复杂曲面以提取目标桥梁的详细几何信息,结合大数据信息和专家先验信息实现桥梁Midas 有限元模型重建,进一步对有限元模型进行参数分析,研究桥梁逆向建模过程中的关键问题.研究结果有望为桥梁健康监测和区域抗震分析提供技术支持.
1 无人机有限元逆向建模方法
利用无人机倾斜摄影技术逆向建立桥梁有限元模型流程如图1 所示,主要包括定义参数、参数获取、建模分析等步骤.首先将有限元建模过程参数化,基于SfM-MVS 算法生成三维点云模型和三维实景模型提取结构简单几何参数,在点云模型基础上利用NURBS 算法提取结构复杂几何参数,结合调查方法获取桥梁内部参数重建有限元模型,对有限元模型进行参数分析并校正模型,实现桥梁有限元模型逆向建模.
1.1 定义参数
基于材料强度、截面尺寸、构件相对位置及形状、连接方式四个方面对逆向工程进行参数化建模,通过三维实景模型确定桥梁外部参数,采用调查方法确定桥梁内部参数,建模过程即确定参数的过程.参数来源分为四个部分:无人机倾斜摄影、现场实测、规范参考取值、大数据获取.获取桥梁建模参数后,考虑到参数来源不同,其准确性也不一样,有必要对参数进行准确可靠程度分级,以研究不确定参数对结构模型精度的影响.依据参数的可靠性对获得的参数进行分级(Level),从0 级(L0)到5 级(L5)共6 个级别,L0 为完全不可靠,L5 为非常可靠,参数分级的详细原则如图2所示.
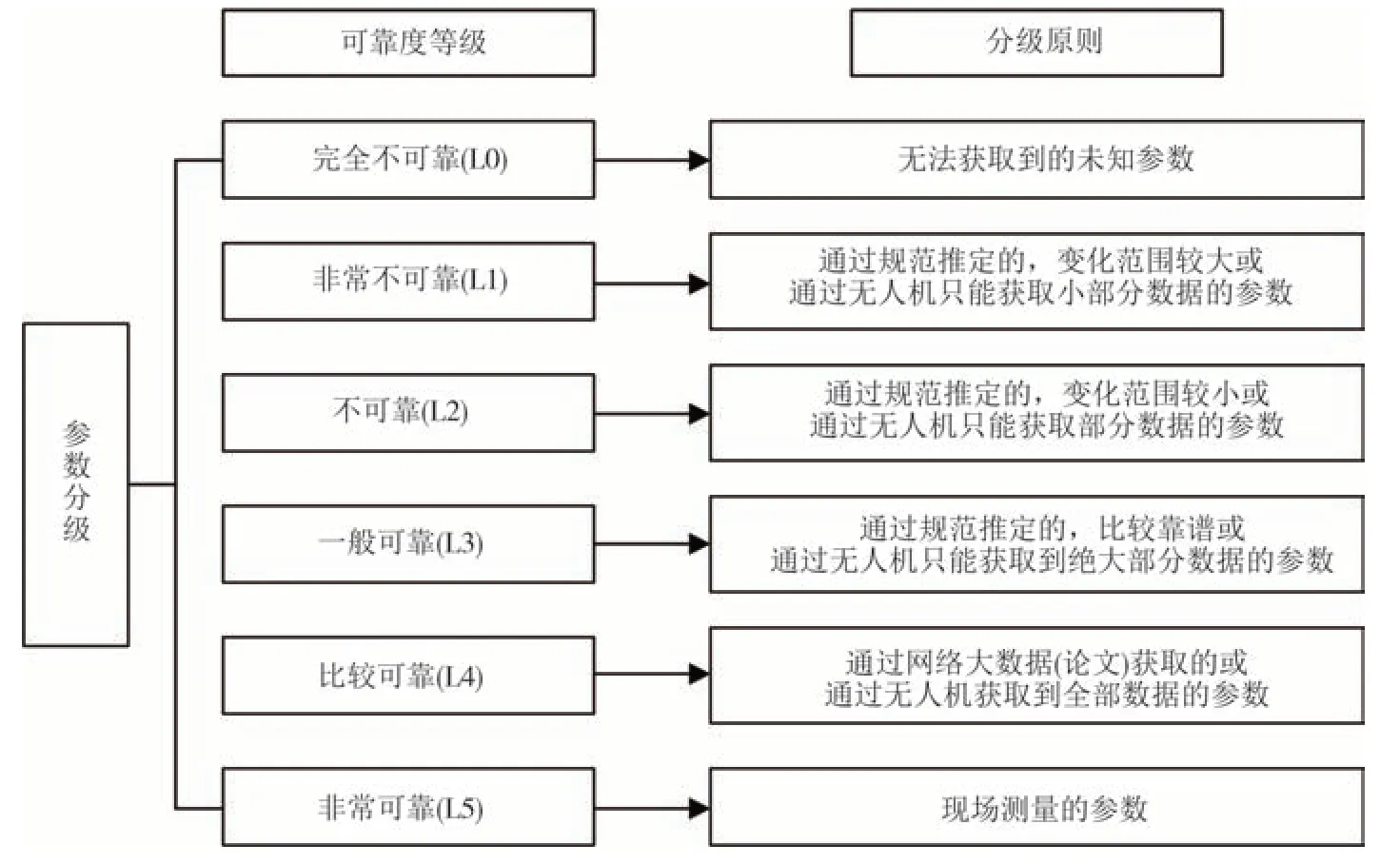
图2 参数分级Fig.2 Parameter classification
1.2 参数获取
参数获取包括内部参数获取和外部参数获取两个部分,内部参数主要通过调查方法获取,以下主要介绍外部参数获取方法原理.
1.2.1 无人机倾斜摄影技术原理
基于SfM-MVS 算法构建桥梁三维实景模型,具体流程包括多视图影像采集、特征点提取与匹配、区域网平差空中三角测量、多视图影像匹配、自动切片纹理映射等(图3).
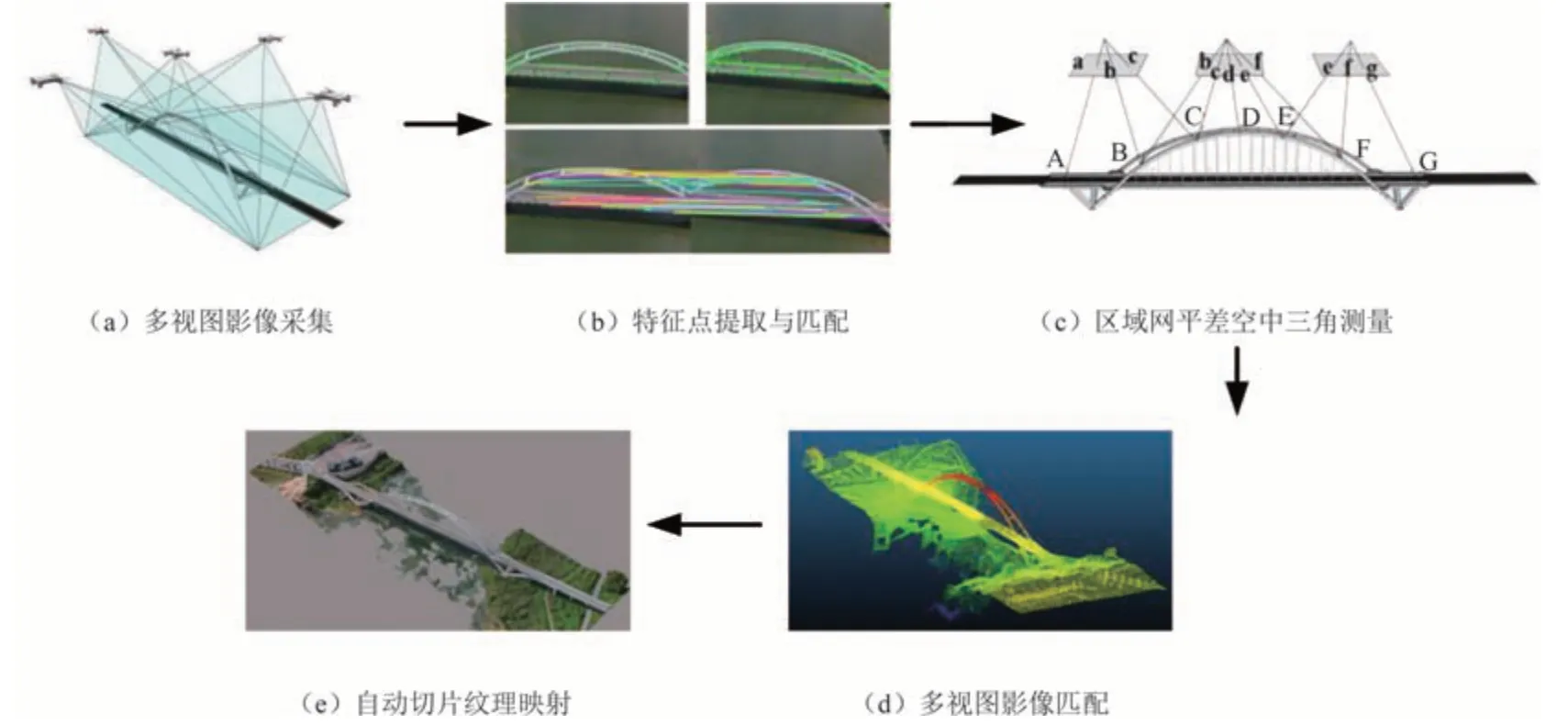
图3 无人机倾斜摄影技术路线图Fig.3 The technical route of UAV oblique photography
1)多视图影像采集:根据倾斜摄影测量原理,需要采集目标区域一个正射及四个倾斜角度航线多视图序列影像数据.无人机航摄时其航线重叠度不宜小于80%,旁像重叠度不宜小于50%,为了控制和消除由于数字积累误差造成的远距离几何失真,应加入位置和姿态系统数据和外控点成果.
2)特征点提取与匹配:利用尺度不变特征变换算法构建尺度空间提取和定位无人机影像序列特征点并确定其特征方向.使用高斯核函数建立图像高斯尺度空间[23]:
式中:L(x,y,σ)为图像尺度空间;I(x,y)为原始图像;σ为尺度空间因子;∗表示卷积运算符;G(x,y,σ)为高斯函数;(x,y)代表图像的像素坐标.
使用差分高斯构建高斯金字塔进行极值检测:
式中:D(x,y,σ)为高斯差分算子;k为相邻高斯尺度空间的比例因子.
提取尺度空间的极值点作为特征点,利用图像的局部特征为每一个特征点分配一个基准方向.使用图像梯度方法求取局部结构的稳定方向,使特征点提取与影像旋转、大小无关,减少无人机系统及航测过程中,因光照、环境差异引起的尺度差异、相片畸变、旋转等问题.同时利用无人机图像中的POS数据,建立影像空间拓扑关系,利用最近邻原理可显著提高特征点匹配效率,快速建立大量同名像点.
3)区域网平差空中三角测量:以摄影中心、像点、物点所组成的光束线为平差的基本单元,使用中心投影共线方程进行平差.在空间中旋转、平移各个光束线,以达到最佳交会[24].即:
式中:(x,y) 为像点坐标;(x0,y0)为像主点坐标;X、Y、Z为像点坐标对应的物方点坐标;XS、YS、ZS为成像投影中心坐标;ai、bi、ci(i=1,2,3)是三个姿态角的方向余弦;f为焦距.
将各航线的正射、倾斜影像平差单元联合为统一的平差区域,进行整体平差,基于最小二乘法解算误差方程,实现稀疏点云构建.
4)多视图影像匹配:使用多视图立体视觉匹配算法对稀疏点云进行加密,使用PMVS 算法,利用Harris算子和DoG算子检测每幅图像的特征点,利用匹配算法得到稀疏三维点云结构,将这些匹配点定义成种子面片,将种子面片进一步扩展,过滤错误面片,迭代扩散,得到稠密的面片结构,完成密集点云的重建.
5)自动切片纹理映射:采用Delaunay 三角化方法对三维密集点云进行三角剖分构建不规则三角网(Triangulated Irregular Network,TIN),将三维网格封装成三维白膜,建立三维点和图像中坐标的对应关系,将图像纹理映射到空间三维白膜上,最终完成三维实景模型的重建.
1.2.2 非均匀有理B样条(NURBS)
NURBS 是3D 几何图形的数学表示,在3D 建模内部空间使用曲线和曲面精确定义几何轮廓和外形,其数学定义如式(5):
式中:wi是权因子:Pi是控制点;Ni,p(u)是p次样条基函数,基函数由递推函数定义.
式中:ui为节点矢量U={u0,u1,⋅⋅⋅,un+p+1}中的第i个元素.
由式(6),NURBS 由四个参数定义:阶数、控制点、节点矢量和权因子.NURBS 的阶数在数学上定义了分段多项式混合函数,多项式阶数越高,曲线和曲面越灵活.控制点由一组不少于(阶数+1)的点组成,其作用是确定曲线位置.节点矢量定义适当的平滑度将多项式片段连接在一起.权因子确定控制点的权值.
1.3 建模分析
基于获取的参数对桥梁进行有限元重建,对重建的有限元模型进行精度验证和参数分析,并基于分析结果矫正有限元模型.
静载挠度和模态频率是评估有限元模型准确度的重要指标,本文基于静载挠度和模态频率使用校验系数和前三阶模态频率误差评估有限元模型精度;为研究参数对建模精度的影响,对模型进行灵敏度分析.校验系数η是评定结构工作状态和变形性能的一个重要指标,由静载数据与有限元模型分析结果比值得到,如式(7)所示.
式中:De、Dr分别表示实测挠度与有限元计算挠度.η≤1 说明有限元计算结果偏于安全;η=1 说明有限元分析结果接近实测结果.
灵敏度分析是分析目标函数相对于不确定参数的敏感程度的过程,研究影响模型输出的各个敏感参数,使用迭代循环的方法实现结构不确定参数的准确识别[25].本文选用静载挠度和模态频率两种数据构成的目标函数进行灵敏度分析,如式(8)和(9)所示.
式中:dai表示实测测点的有限元模型挠度计算结果;dei表示静载试验中的实测挠度;t为不确定参数;i表示测点编号.
式中:fai和fei分别为有限元模型分析得到的模态频率和由SSI方法分析得到的模态频率.
2 巴溪洲大桥三维实景模型重建
本次现场试验使用无人机采集长沙市巴溪洲大桥多视图序列影像,使用基于SfM-MVS 算法的无人机倾斜摄影技术建立桥梁三维实景模型.
2.1 试验对象与设备
本次试验研究对象为巴溪洲大桥,该桥位于湖南省长沙市,结构形式为飞燕式钢箱提篮拱,桥长280 m,桥宽9.5 m,拱肋结构为全焊提篮式钢箱拱,拱轴系数1.8,跨径142 m,矢高24.89 m,由五道钢箱横撑连为整体[26-27](图4).
本次试验采用DJI Mavic2 型无人机,其最大像素2 000 万,等效焦距28 mm,可实时接收全球卫星导航系统信号,获取准确的无人机飞行定位信息.
2.2 数据采集
数据采集宜在晴朗、光照充足、可见度高、风力较小的环境下进行.使用无人机航线规划软件DJI Pilot 进行自动数据采集,三维建模软件采用Context-Capture10.17软件.在大水域面积下进行无人机倾斜摄影时,水面光滑,表面纹理特征较少,软件进行解算时无法匹配到特征点,导致实景模型产生大量空洞,同时传统的五视倾斜摄影无法获取到桥梁底部的照片.为了解决这些问题,本研究采用三种摄影方式进行影像采集.
首先采用五视倾斜摄影采集目标桥梁多视图影像数据,采集目标区域一个正射及四个倾斜角度影像,飞行高度100 m,航向重叠度80%,旁向重叠度80%,云台俯仰角度-45°.然后对目标桥梁进行细节补拍,对目标区域进行四周环绕摄影,设置飞行高度60 m,云台俯仰角度-45°.最后采用“阶梯式”摄影方式采集桥梁底部影像,以桥梁一侧南北两边距桥梁100 m、高度80 m 处为飞行起点,桥梁另一侧底部为终点,每前进5 m 和下降5 m 拍摄一张影像,手动调整云台角度,确保桥梁底部位于影像中间,如此反复,直到无人机获取到桥梁另一侧底部结构影像.采用“阶梯式”摄影方式能使桥梁底部影像与五视倾斜摄影影像的重叠度满足要求,防止软件解算时无法匹配桥梁底部的同名特征点,具体航线如图5所示.
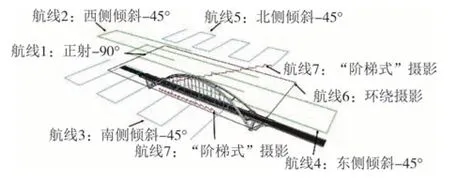
图5 无人机数据采集航线Fig.5 Data acquisition route of UAV
2.3 三维实景模型
对采集的桥梁影像数据进行处理,依据第一节SfM-MVS 算法原理重建巴溪洲大桥三维实景模型,如图6所示.
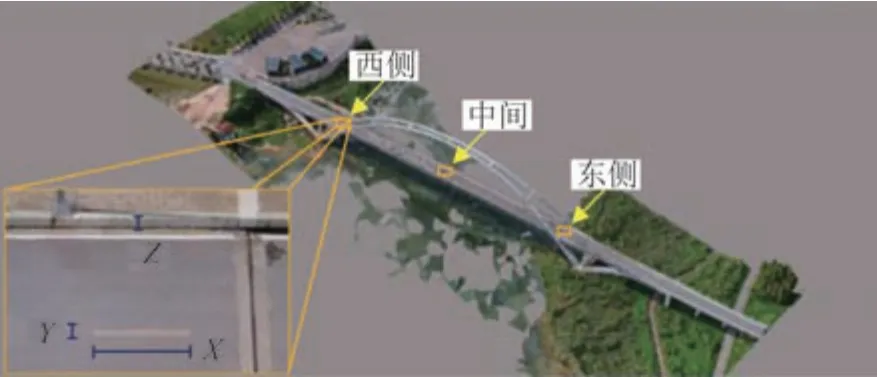
图6 巴溪洲大桥三维实景模型Fig.6 3D realistic model of Baxizhou Bridge
对桥梁东侧、西侧和中间的3 条道路分道线及3处车行道与人行道的高度差进行了实测(图6).从模型中提取相应的模型值,利用均方根误差对所有检查点误差进行分析,用均方根误差和平均实测长度的比值作为误差率,以分道线X向(桥梁横向)和Y向(桥梁纵向)长度误差表征模型X向和Y向精度,以车行道与人行道高度差表征模型Z向精度.X、Y、Z三个方向及三维精度计算公式分别如下:
式中:Ti和分别表示X、Y、Z三个方向第i段现场实测值和模型分析值;ST为T方向均方根误差;S为三维方向均方根误差.
相应的计算结果如表1 所示,X、Y、Z向及三维误差均在2%以内,三维实景模型的精度和云台精度、飞行高度、光照条件等密切相关,本模型精度满足要求.
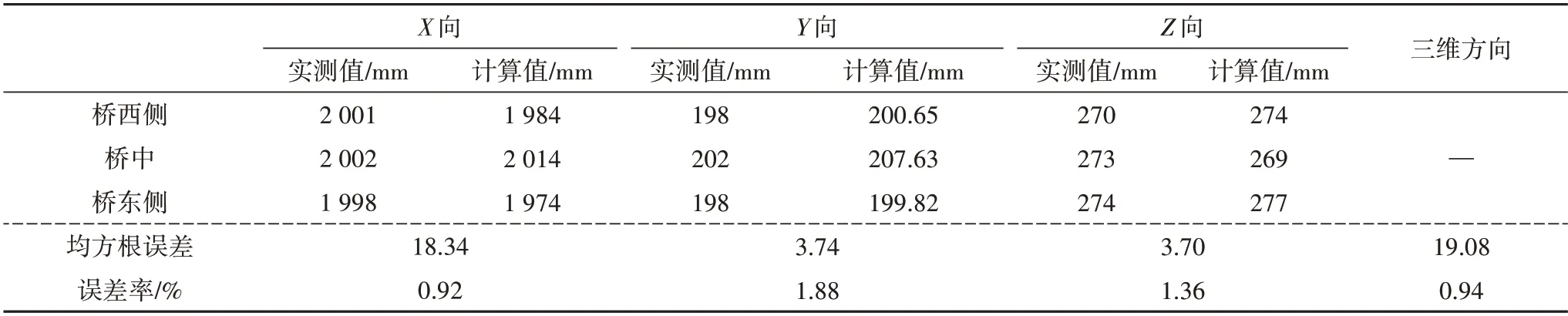
表1 高度差实测值和计算值Tab.1 Altitude intercept measured values and calculated values
仅有五视倾斜没有“阶梯式”摄影的建模结果如图7所示.具体细节对比如表2所示.
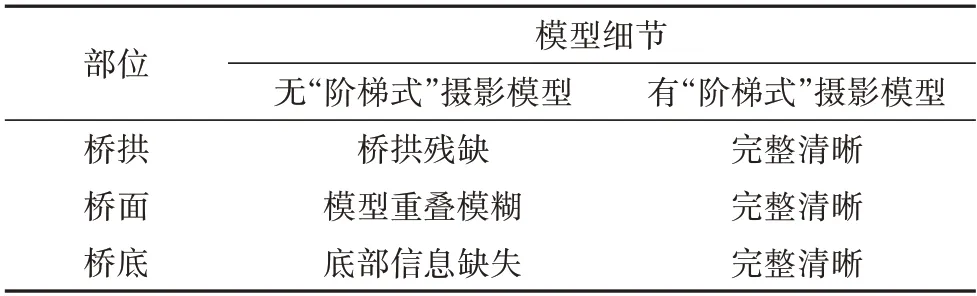
表2 模型细节对比Tab.2 Model details comparison

图7 无“阶梯式”摄影模型Fig.7 No-ladder photography model
由图7和表2可知,“阶梯式”摄影可以有效提高在大水域面积下的桥梁建模完整度和精度.
3 巴溪洲大桥有限元逆向建模
3.1 有限元建模过程参数化
为简化有限元建模过程,对模型进行参数分类,根据1.1节参数化原则和参数分级细则,将巴溪洲大桥建模过程参数化为49 个参数,具体的参数内容和分级如表3~表5所示.
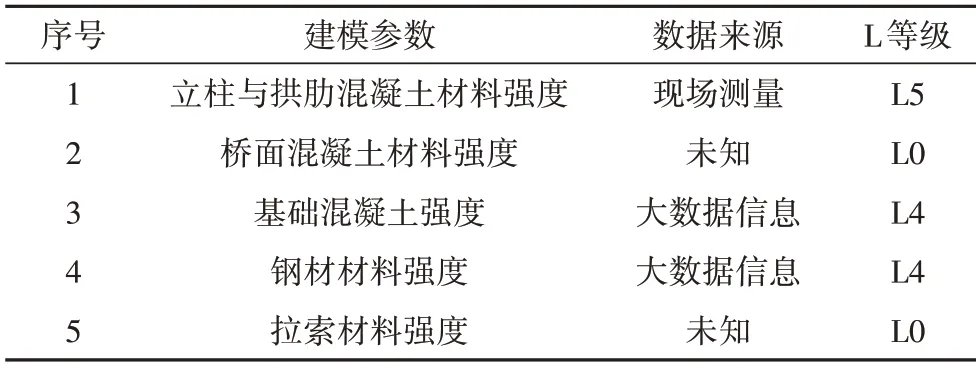
表3 桥梁建模材料参数Tab.3 Material parameters of bridge modeling
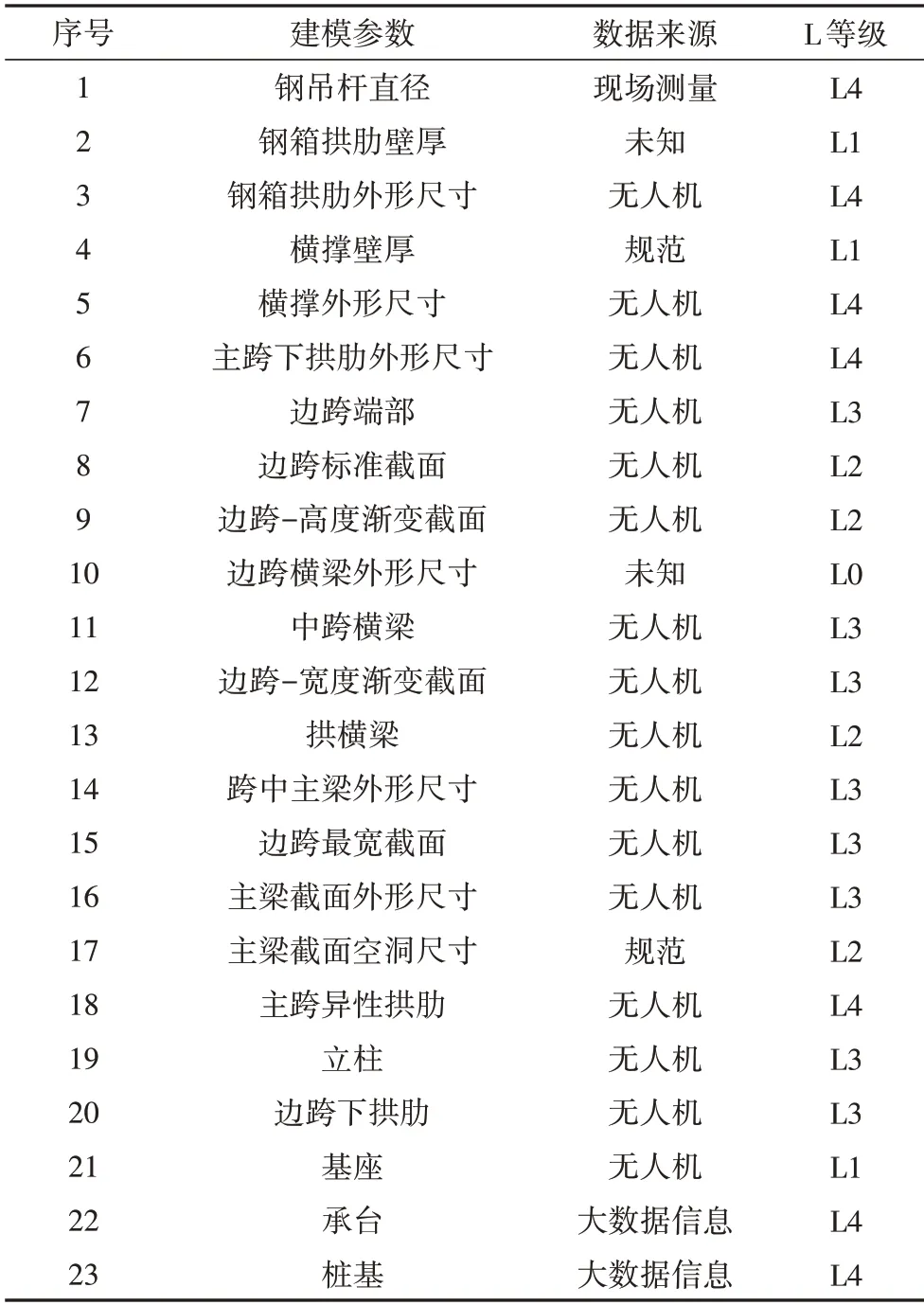
表4 桥梁建模截面参数Tab.4 Section parameters of bridge modeling
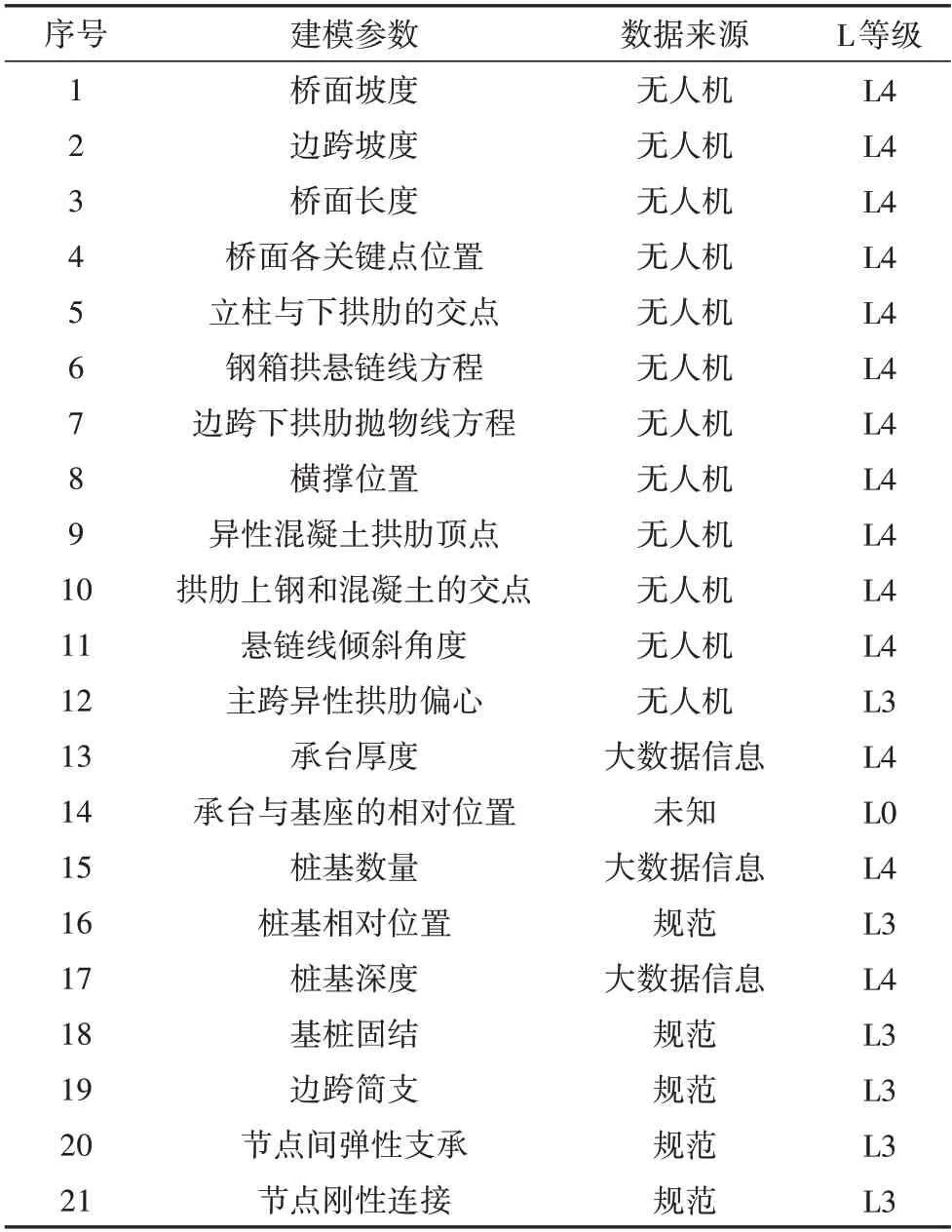
表5 桥梁建模位置与形状参数Tab.5 Position and shape parameters of bridge modeling
3.2 桥梁有限元逆向建模
本文采用Midas Civil 软件对桥梁进行手动建模,对于未知参数,根据规范确定合理值以便进行建模,这些参数被定义为不确定参数,随后进行灵敏度分析.
基于1.2.2节NURBS方法获取桥梁的拱肋曲面,将SfM-MVS算法生成的桥梁三维点云模型导入Rhi-noceros 软件中,该软件根据点云模型生成复杂且精密的NURBS 曲面,如图8 所示.随后将曲面导入AutoCAD 中,利用CAD 确定截面尺寸和钢拱曲线的关键点坐标,利用Matlab 拟合拱肋曲线的悬链线方程,得到拱轴系数为1.797,与设计值1.8 较为接近.桥梁有限元模型最终建模结果如图9 所示,定义有无大数据信息模型分别为模型1和模型2.
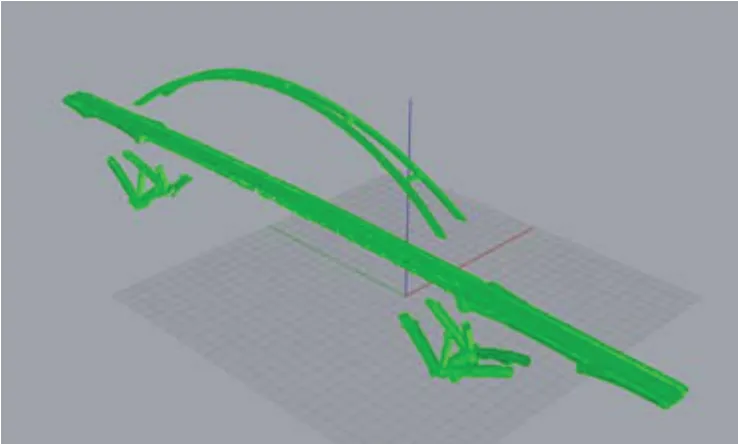
图8 巴溪洲大桥NURBS曲面Fig.8 NURBS surface of Baxizhou Bridge
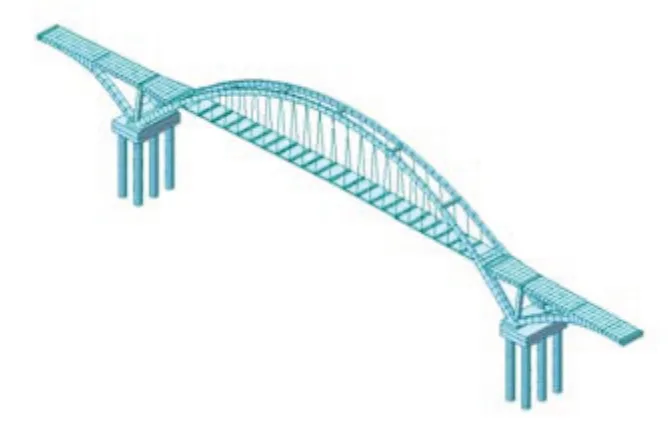
图9 巴溪洲大桥有限元模型Fig.9 FE Model of Baxizhou Bridge
4 逆向建模精度验证及参数分析
4.1 精度验证
本研究团队于2014 年对该桥梁进行了成桥试验,目前该桥通行交通量不大,结构状态良好.将模型1 与实桥试验的分析结果[27]进行对比.选取加载变形最大的主跨1/2 位置加载4 台车工况下的结构静载变形及桥梁前三阶振动频率进行对比,计算结果与实测结果的对比如图10 所示,前三阶振动频率对比结果列于表6.
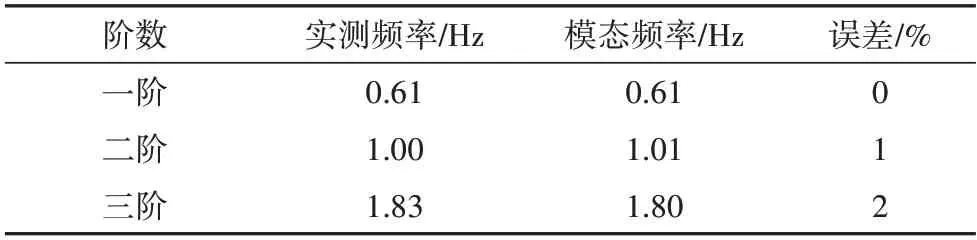
表6 前三阶频率对比Tab.6 Frequency comparison of the previous three orders
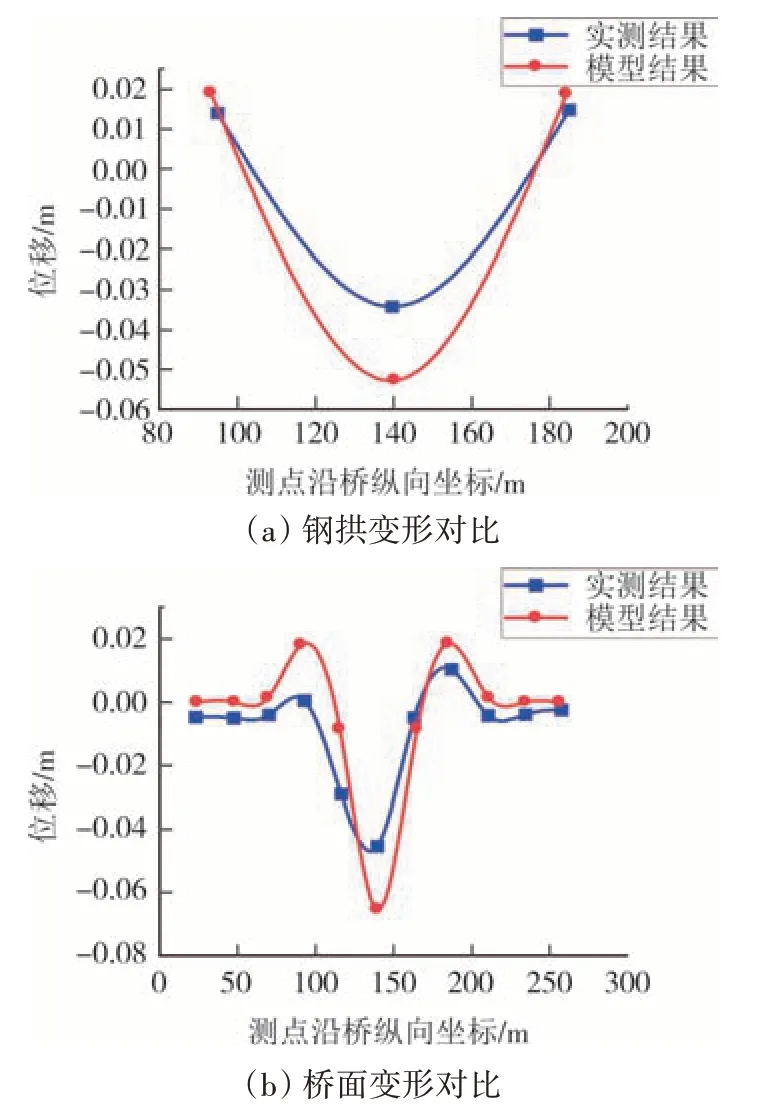
图10 静载变形对比Fig.10 Comparison of static deformation
依据1.3节校验系数评估模型静态挠度,钢拱和桥面校验系数在0.57~0.79,满足钢筋混凝土拱桥挠度校验系数在0.5~1.0 的要求,由于未考虑钢筋对结构的影响,模型预测偏于保守.
由表6 可知,前三阶分析振动频率与实测值较为接近,最大误差在2%以内,精度满足要求.分析静载变形和模态频率可知,有限元模型分析结果与实桥试验结果吻合良好,基于无人机倾斜摄影技术逆向建立的桥梁有限元模型可以反映桥梁的实际状况.
考虑无法从大数据信息获取到参数的场景,剔除这部分参数重建有限元模型,在模型2 中删除基座以下部分,设置基座完全刚性连接,通过分析得到模型2 的校验系数和模态频率与模型1 对比结果如表7所示.
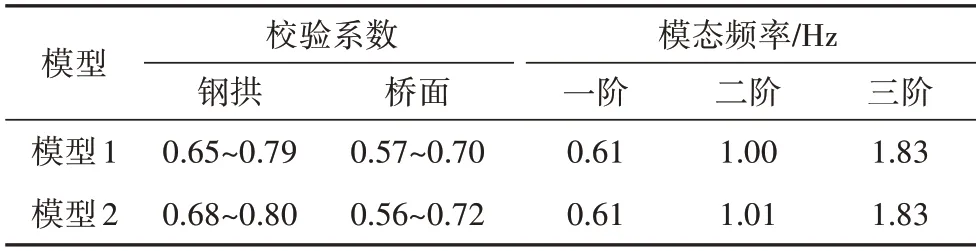
表7 模型1与模型2计算值对比Tab.7 Comparison of model 1 and model 2
由表7 可知,仅依靠视觉外观和专家先验信息重建的模型也可较为真实地反映桥梁实际状况,说明此方法也可以应用在无法从大数据信息获取参数的场景中.根据实际情况,本研究在以下分析中以模型1为基准.
4.2 不确定参数对逆向建模精度的影响
对L0~L2 不确定参数进行灵敏度分析,参数灵敏度分析在基于经验结合工程实际基础上确定取值范围,取最大值作为上限,最小值作为下限,对取值范围进行十等均分,以分析目标函数在不确定参数的取值范围内的变化趋势,结果如图11所示.
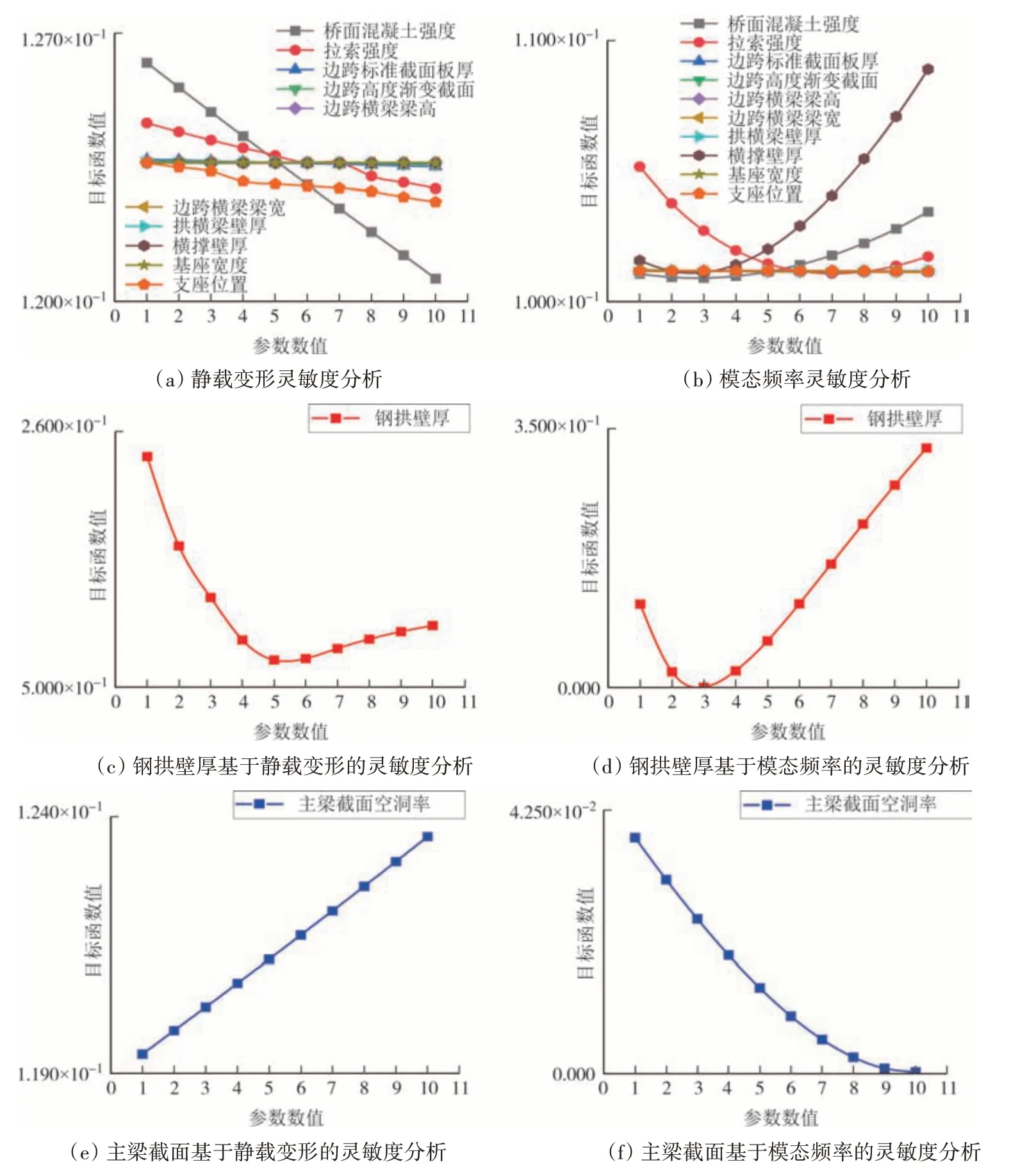
图11 不确定参数灵敏度分析结果Fig.11 Sensitivity analysis results of unreliable parameters
综合考虑两种目标函数的灵敏度分析结果,对计算结果影响最大的不确定参数是钢箱拱肋壁厚,其次是主梁截面空洞率、横撑壁厚、桥面混凝土强度、拉索强度.分析以上结果,桥梁主要受力构件对模型分析结果影响较大,非主要受力构件影响较小,符合桥梁结构分析的基本原则.
4.3 模型修正
基于模态频率灵敏度分析结果进行修正,将工作模态分析结果前三阶模态频率选为修正参数,通过调整影响最大的5 个不确定参数的取值,确定与工作模态分析结果最接近的有限元模型,校验结果统计见表8.

表8 基于模态频率的灵敏度分析参数及校验结果Tab.8 Sensitivity analysis parameters and verification results based on modal frequency
相较于修正前,修正后的模态频率误差由2%降低至1%,校验系数从0.57~0.79 提升至0.63~0.81,修正前后的模型分析结果比较接近.究其原因,基于无人机倾斜摄影技术建立的桥梁有限元模型精度较高,修正前的模型分析结果接近实测结果.
5 结语
本研究提出了基于无人机倾斜摄影技术的桥梁有限元逆向建模方法,将该方法成功应用于长沙市巴溪洲大桥有限元模型重建,通过现场实测验证了桥梁三维实景模型精度,桥梁有限元模型可以较为真实地反映桥梁真实状况,得出以下结论:
1)大水域面积下利用无人机倾斜摄影技术建立桥梁三维实景模型时,水面表面纹理特征较少导致软件解算时无法匹配特征点,使模型产生大量摄影空洞.在传统五视倾斜摄影的基础上对桥梁进行环绕摄影补拍可以解决模型空洞问题,采用“阶梯式”摄影方式获取桥梁底部三维实景模型细节.
2)基于无人机倾斜摄影技术逆向建立桥梁有限元模型方法可以有效重建桥梁的有限元模型,桥梁三维实景模型的精度可以达到2%,NURBS方法可以有效拟合桥梁复杂曲面,有限元模型的校验系数为0.57~0.79,模态频率的误差在2%以内,表明该方法建立的桥梁有限元模型可以反映桥梁真实状况.
3)将建模过程参数化可以使逆向建模系统化,有助于提高桥梁的建模速度和精确度,对参数进行可靠度分级可以量化参数的可靠性,灵敏度分析可以分析不确定参数对建模结果的影响.桥梁主要受力构件对建模结果影响较大,建模时应该重点关注相关参数.
今后的研究将针对不同桥梁结构类型分别进行参数化建模研究,建立桥梁有限元逆向建模系统理论,研究逆向建模自动化方法,实现基于无人机技术系统化、流程化、快速化地建立目标桥梁有限元模型,为桥梁健康监测和区域抗震快速分析提供技术支撑.
