半挂汽车列车多轴主动转向控制策略研究
2023-10-08邓召文孔昕昕
邓召文,孔昕昕,高 伟,3
(1.湖北汽车工业学院 汽车工程师学院,湖北 十堰442002; 2.湖北汽车工业学院 汽车工程学院,湖北 十堰442002;3.南京航空航天大学 能源与动力学院,江苏 南京210016)
0 引 言
汽车列车车体长、质心高、体积大,低速圆形工况行驶时,路径跟踪性能差,车辆通过道路面积大,机动性差;在高速工况行驶时,车辆容易发生侧向失稳,稳定性差。近年来研究人员通过研究汽车列车主动转向控制,来提高半挂汽车列车低速机动性和高速稳定性。
S.MILANI等[1]提出了一种基于LQR控制的挂车主动转向控制器,并采用量子粒子群优化算法对权重因子进行优化,在低速时减小了轨迹跟踪误差,高速时改善了车辆后部放大比率RWA(rearward amplification)和侧倾稳定性;N.ESMAEILI等[2]基于滑模控制理论设计了滑模控制器用来控制挂车后轴的转向,提高车辆的操纵稳定性;刘春辉等[3]提出一种以牵引车横摆角速度为控制变量的模糊控制器,对牵引车后轮转角进行控制,以实现零质心侧偏角(理想状态下车辆质心侧偏角为零)的目标,显著提高了汽车列车的操纵稳定性;李卓青[4]利用模糊PID控制器对零质心侧偏角控制策略进行优化,提高了车辆的操纵稳定性;冯善坤[5]设计了LQR控制器与鲁棒控制器,改善了汽车列车的转向性能,且提升了控制器的鲁棒性;张磊等[6]提出一种LQR控制的挂车主动转向控制器,用来改善汽车列车的侧倾稳定性,但牺牲了挂车部分横向稳定性和路径跟踪性能。
现有的大多数研究主要针对牵引车后轴或挂车后轴进行主动转向控制,很少有同时考虑牵引车后轴和挂车后轴的主动转向控制研究。笔者基于LQR控制理论设计主动转向控制器,对牵引车后轴及挂车后轴车轮转角进行控制,从而达到提高半挂汽车列车低速机动性和高速稳定性的目的。首先,在MATLAB/Simulink建立三自由度线性参考模型,并对参考模型的有效性进行验证;其次,以牵引车和挂车实际横摆角速度趋近于参考模型横摆角速度为其一控制目标,以零质心侧偏角为另一控制目标,设计LQR主动转向控制器;最后,将TruckSim与Simulink进行联合仿真,通过低速360°圆形工况与高速单移线工况进行仿真试验,并与传统仅有牵引车前轮转向的无控制车辆模型进行对比分析,验证LQR主动转向控制器的控制效果。
1 建立三自由度线性参考模型
汽车列车模型结构复杂,笔者将三轴半挂汽车列车简化为考虑牵引车后轮、挂车后轮转向的三自由度线性模型,结构如图1。图1中:x1O1y1为牵引车车辆坐标系;x2O2y2为挂车车辆坐标系;XOY为全局坐标系。

图1 三自由度线性参考模型
由图1可得牵引车、挂车的运动方程:
(1)
(2)
(3)
(4)
式中:Fi为轮胎所受侧向力,Fi=kiαi,i=1、2、3,其中,αi为轮胎侧偏角。
第5轮处的铰接约束为:
(5)
轮胎所受侧向力为:
(6)
(7)
(8)
通过对式(1)~式(8)的带入计算及化简分析,最终可以得到线性模型的状态空间方程为:
(9)
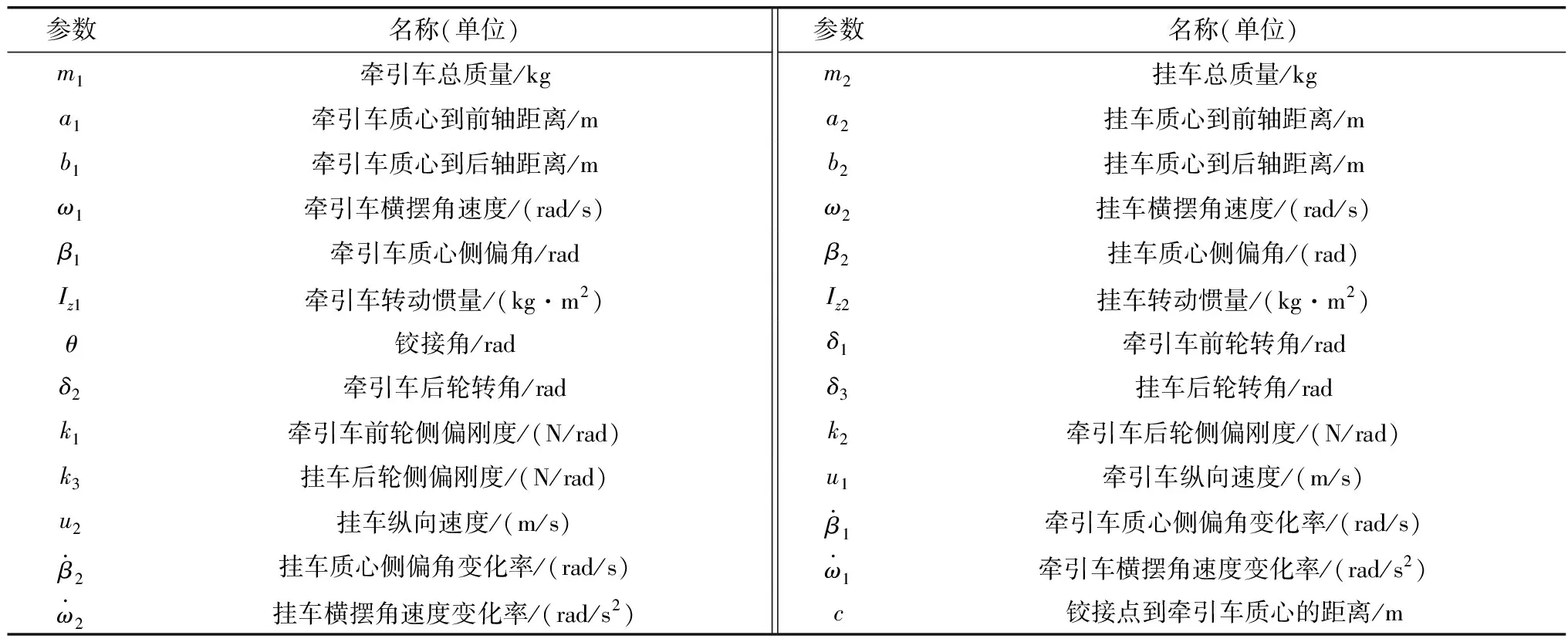
表1 参数名称
(10)
(11)
(12)
(13)
2 参考模型验证
为了验证三自由度线性参考模型的有效性,在TruckSim中建立三轴半挂汽车列车模型,利用方向盘角阶跃输入工况对比2个模型的偏差,从而验证三自由度线性参考模型的有效性。车辆基本参数如表2。

表2 车辆基本参数
方向盘角阶跃工况曲线如图2,验证对比曲线如图3~图6。
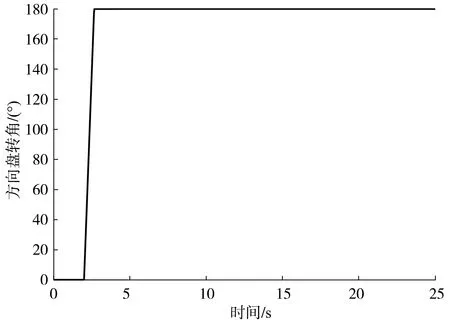
图2 方向盘角阶跃工况曲线
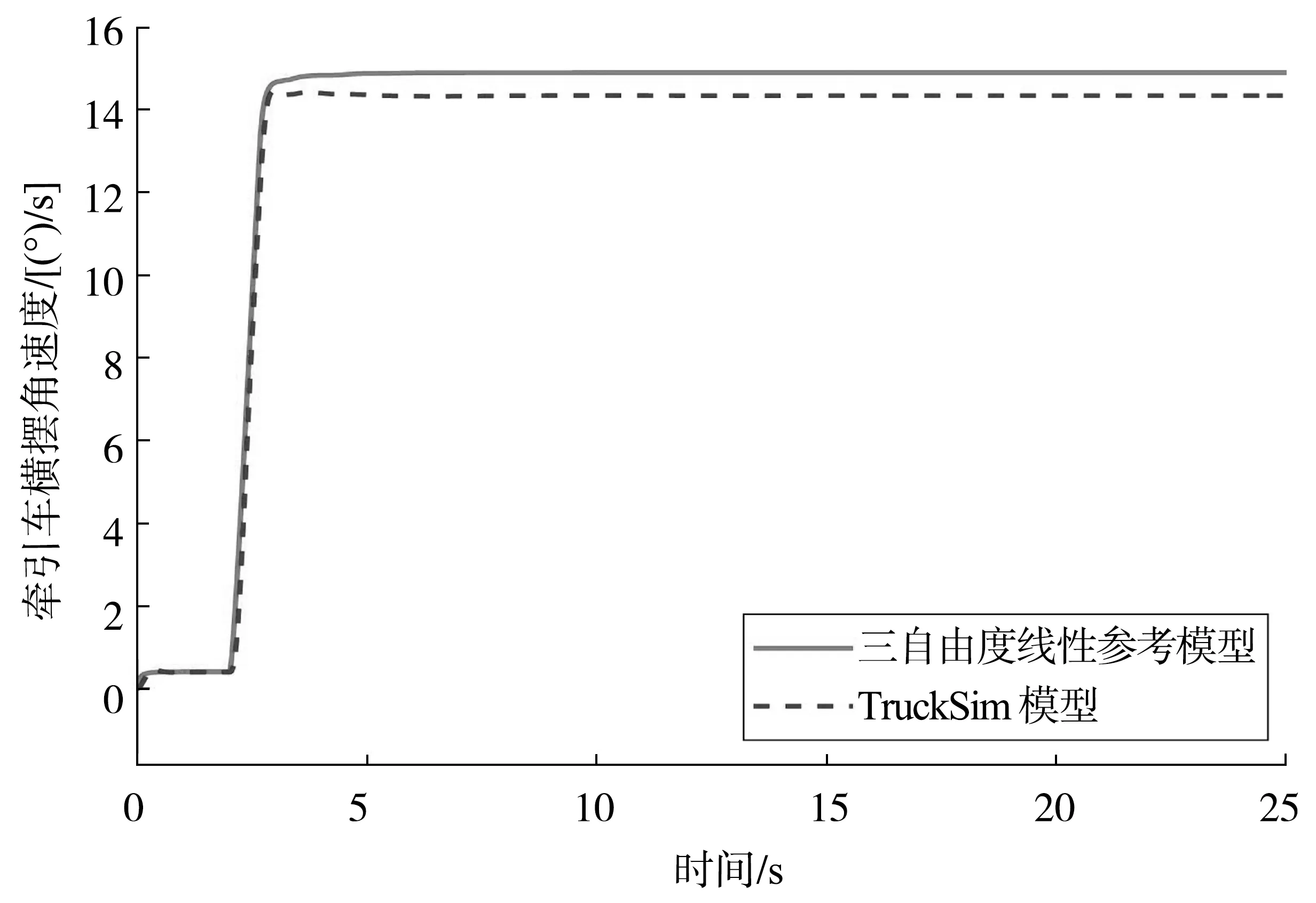
图3 牵引车横摆角速度对比

图4 挂车横摆角速度对比

图5 牵引车质心侧偏角对比

图6 挂车质心侧偏角对比
由图3~图6可知,三自由度线性参考模型与TruckSim模型的横摆角速度变化规律相同,且均能很快趋于稳定,偏差较小。质心侧偏角也具有相同的变化规律,TruckSim模型的质心侧偏角在3 s附近存在小幅度震荡,而线性模型的质心侧偏角在3 s附近存在一定超调量,但都很快趋于稳定且曲线拟合程度较高。将三自由度线性参考模型与TruckSim模型进行对比分析,三自由度线性参考模型能够较好地反映车辆的运动特性,模型有效。
3 主动转向控制器设计
设计了一种基于LQR控制的牵引车和挂车主动转向控制器,利用车辆实际的横摆角速度、质心侧偏角与参考目标的误差,通过LQR主动转向控制器获得反馈控制矩阵,得到最优车轮转角,从而实现对牵引车后轮及挂车后轮的转向控制,以改善汽车列车的低速机动性和高速稳定性。
为保证汽车列车在行驶过程中具有良好稳定性和转向性,将零质心侧偏角作为控制目标之一;以实际横摆角速度趋近三自由度线性参考模型的横摆角速度为另一控制目标。则LQR控制器的参考目标可以定义为:
(14)
式中:β1d、β2d分别为牵引车、挂车零质心侧偏角;ω1d、ω2d分别为牵引车、挂车线性参考模型的横摆角速度。
LQR控制器的误差向量为:
(15)
式中:e为实际状态量与参考目标状态量之间的误差,其表达式见式(16):
(16)
设计LQR控制器的目的是使牵引车和挂车遵循参考的横摆角速度,同时使质心侧偏角趋近于零。因此,LQR控制器的目标函数设计为:

(17)
式中:Q、R为权重矩阵。
最优车轮转角δ为:
δ=-Ke
(18)
式中:K为反馈矩阵。
LQR主动转向控制器结构如图7。

图7 LQR主动转向控制器结构
4 联合仿真与分析
4.1 低速圆形道路工况仿真分析
由于选用的车辆模型宽度为2.438 m,根据GB 1589—2016要求,设置半径为11.5 m的圆形工况路面进行试验[7]。仿真开始后,牵引车前轴中心沿直线行驶一段距离,然后逐渐进入圆形道路,车速为10 km/h,路面附着系数为0.85。LQR控制器的权重矩阵Q、R分别为Q=diag(10,0.1,10,0.1)、R=diag(1,1),权重矩阵的数值通过反复试验确定。圆形道路的中心轨迹如图8,车辆运动轨迹对比曲线如图9,车轮转角变化曲线如图10。

图8 圆形路面的中心轨迹

图9 车辆运动轨迹对比曲线

图10 各轴车轮转角曲线
在图9中,纵坐标和横坐标分别表示牵引车前轴、牵引车后轴和挂车后轴3个质心在Y轴方向和X轴方向的行驶轨迹。相比于目标轨迹半径(11.5 m),车辆施加LQR主动转向控制后,牵引车后轴最大转向半径为11.41 m,轨迹跟踪偏差为0.090 m,而无LQR主动转向控制的车辆的牵引车后轴轨迹跟踪偏差为0.405 m,即LQR主动转向控制相比于无控制,其牵引车后轴轨迹跟踪偏差降低了77.78%;同时,相比于目标轨迹半径(11.5 m),车辆施加LQR主动转向控制后,挂车后轴最大转向半径为10.81 m,轨迹跟踪偏差为0.690 m,而无控制车辆的挂车后轴轨迹跟踪偏差为2.335 m,即LQR主动转向控制相比于无控制,挂车后轴轨迹跟踪偏差降低了70.38%。
由图10可知,低速行驶时,牵引车后轴车轮与挂车后轴车轮的主动转向角与牵引车前轴车轮的转角方向相反。这是由于车辆在低速行驶时,前后轴车轮转角方向相反,可以改善车辆低速时的操纵轻便性,减小转弯半径,提高车辆的机动性[8]。
由此说明,LQR主动转向控制器显著减小了汽车列车通过路面宽度,有效提高了车辆的低速通过性和机动性。
4.2 高速单移线工况仿真分析
高速选用单移线工况进行试验,工况设计车速为88 km/h,路面附着系数为0.85。LQR控制器的权重矩阵Q,R分别为Q=diag(100,0.1,120,0.1),R=diag(1,1),权重矩阵的数值通过反复试验确定。单移线工况如图11;车辆轨迹、质心侧偏角、横摆角速度、车轮转角对比曲线如图12~图18;曲线参数最值如表3。

表3 曲线参数最值

图11 单移线工况曲线

图12 无控制轨迹曲线
由图12、图13可以看出,与无控制车辆相比,LQR主动转向控制的轨迹跟踪误差明显减小。由表3可得,与无控制车辆相比,LQR主动转向控制的挂车后轴中心轨迹最大跟踪误差由0.032 m减小到0.005 m,降低了84.37%,有效提高了汽车列车挂车高速的路径跟踪性能。
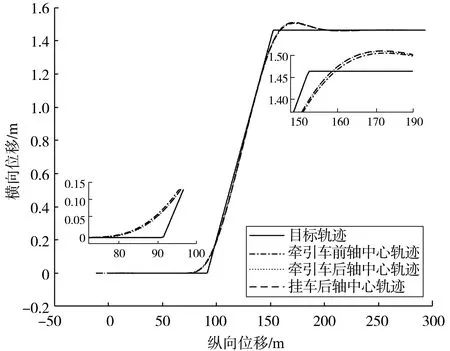
图13 LQR主动转向控制轨迹曲线
由图14~图17可以看出,与无控制车辆相比,LQR主动转向控制车辆质心侧偏角大幅度减小,横摆角速度也明显减小。由表3可得:牵引车质心侧偏角最大值降低了73.97%;挂车质心侧偏角最大值降低了79.18%;牵引车横摆角速度最大值降低了16.44%;挂车横摆角速度最大值降低了13.54%。由此可知,LQR主动转向控制有效改善了汽车列车的高速稳定性。
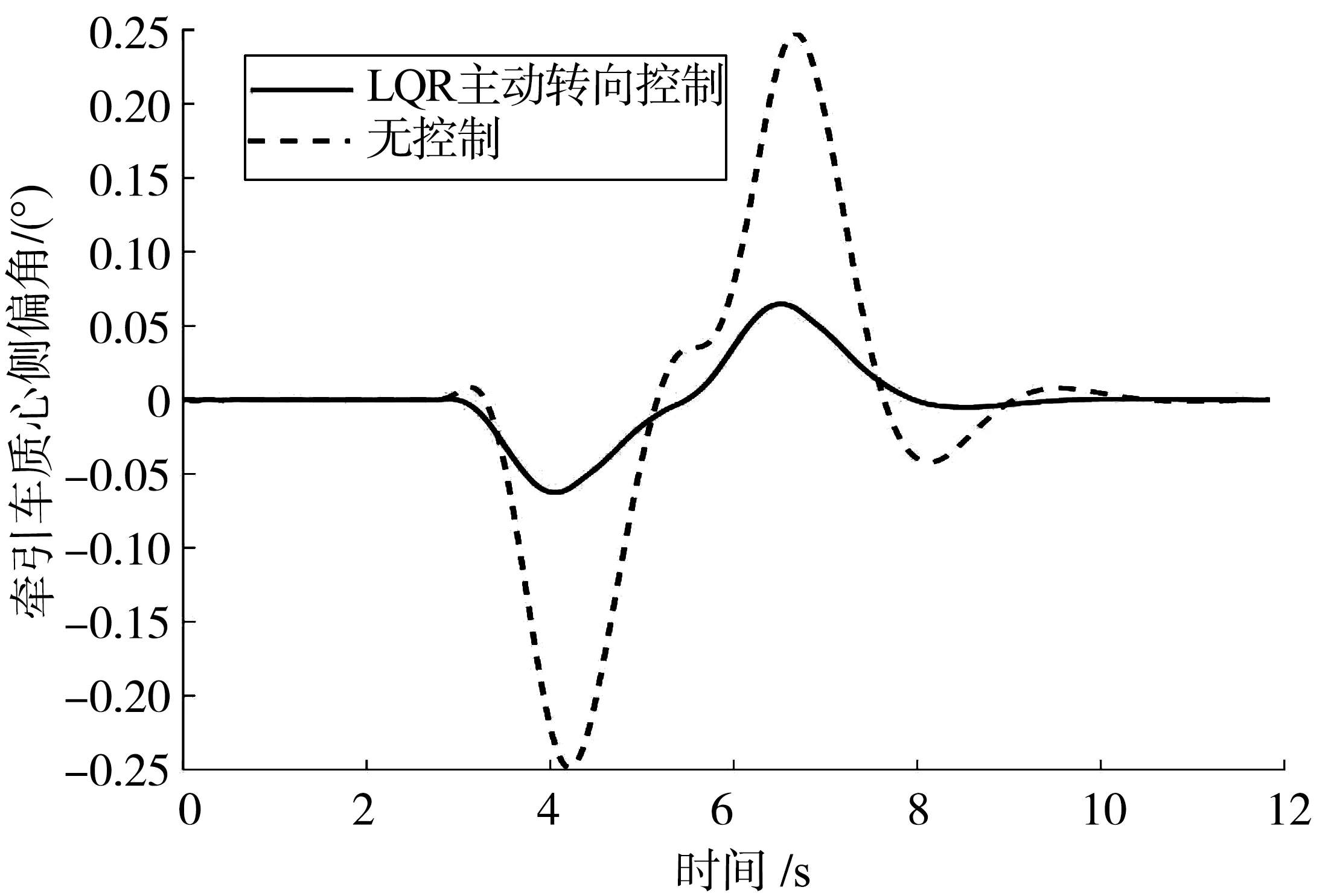
图14 牵引车质心侧偏角曲线

图15 挂车质心侧偏角曲线

图16 牵引车横摆角速度曲线

图17 挂车横摆角速度曲线
由图18可知,高速行驶时,牵引车后轴车轮与挂车后轴车轮的主动转向角与牵引车前轴车轮的转角方向相同。这是由于车辆在高速行驶时,前后轴车轮转角方向相同,可以使车辆的横摆角速度降低,防止车辆发生侧倾,提高车辆在高速行驶的稳定性[8]。这种主动转向机构可以使用电控液压转向桥实现,由前主转向液压缸、后副转向液压缸、储油器、油管及压力开关组成。可以有效实现商用车在大载重下的主动转向,提高车辆的操作稳定性。

图18 各轴车轮转角曲线
4.3 铰接式车辆后部放大性能测试
后部放大比率RWA是评价汽车列车高速横向稳定性的一个重要指标[9]。RWA是指挂车单元对牵引车单元横向运动的放大程度,一般用挂车质心处最大侧向加速度绝对值与牵引车质心处最大侧向加速度绝对值的比值表示,比值越小,横向稳定性越好[10]。文献[11]规定,RWA测试方法为高速单车道变道试验,车速为88 km/h。牵引车、挂车的侧向加速度曲线如图19、图20;牵引车、挂车侧向加速度的最值如表4。

表4 侧向加速度最值
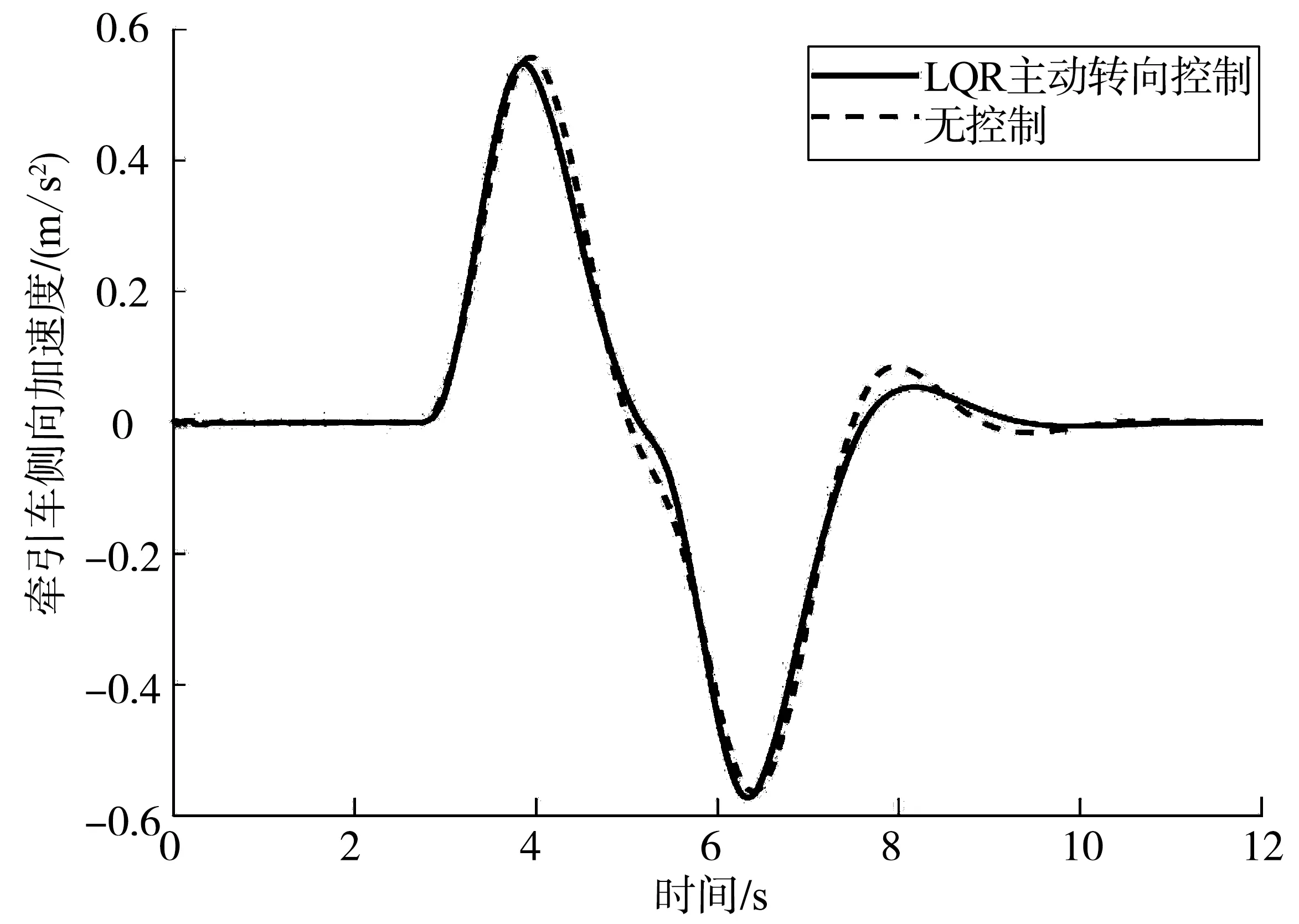
图19 牵引车侧向加速度曲线

图20 挂车侧向加速度曲线
由表4可得,无控制车辆的RWA=1.011,施加LQR主动转向控制的车辆RWA=0.99,说明设计的LQR主动转向控制器对车辆RWA有一定改善。
5 结 论
1)在MATLAB/Simulink中搭建半挂汽车列车三自由度线性参考模型,并验证了模型的有效性;为LQR主动转向控制器提供了参考的横摆角速度。
2)设计了LQR主动转向控制器,对牵引车后轴及挂车后轴车轮转角进行控制,将Simulink模型与TruckSim进行联合仿真,并与无控制车辆模型进行对比分析。
3)仿真结果表明,在低速圆形道路试验工况下,LQR主动转向控制车辆的牵引车后轴及挂车后轴轨迹跟踪误差分别降低了77.78%、70.38%;在高速单移线试验工况,LQR主动转向控制车辆挂车后轴轨迹跟踪误差降低84.37%,牵引车质心侧偏角、横摆角速度最大值分别降低了73.97%、16.44%,挂车质心侧偏角、横摆角速度最大值分别降低了79.18%、13.54%,车辆的后部放大比率由1.011减小到0.99。且车辆的主动转角满足车辆前轴转角在低速同向、高速反向的要求。研究结果表明,设计的LQR主动转向控制策略能够有效提高半挂汽车列车的低速机动性和高速稳定性,并且对高速车辆的路径跟踪性能也有所改善。
