接触网巡检系统空间综合定位方法
2023-10-08宋佳明陈唐龙
宋佳明 占 栋 陈唐龙
(西南交通大学电气工程学院, 610031, 成都∥第一作者, 硕士研究生)
接触网是轨道交通系统基础设施的重要组成部分,其良好的运行状态是轨道交通系统安全运行的前提条件之一。电气化铁道接触网的巡检工作是保证接触网设备安全、提高供电可靠性、确保接触网正常运行的一项基础工作,是接触网运营管理工作的一项重要内容。接触网巡检过程中的定位精度是确保采集信息有效性的前提。单一的定位方式存在稳定性差、定位精度低和可靠性差等缺点,基于多种定位方式的综合定位系统是未来接触网巡检定位技术的重要发展方向。文献[1]根据列车运行轨迹的受限条件,提出了一种结合轨道约束的改进型粒子滤波融合估计方法。文献[2]研究了基于GPS(全球定位系统)/INS(惯性导航系统)及关键应答器的列车组合定位方法,提出了基于奇异值分解的容积卡尔曼鲁棒滤波算法。文献[3]研究了基于扩展卡尔曼滤波的GPS/ODO(里程计)列车组合定位方法,提出了当GPS信号中断时,宜采用里程计和数字地图数据库相结合的定位方法。文献[4]提出了一种基于GNSS(全球导航卫星系统)伪距测量值和轨道地图信息联合估计列车速度及位置的贝叶斯估计算法。
上述文献虽然研究了接触网巡检过程中的各种组合定位方法,但其均存在定位精度低、可靠性差等问题。针对上述问题,本文提出一种采用多定位方式的空间综合定位方法,该方法引入了误差比较机制,能够满足多场景综合定位的需求,以及提高接触网巡检系统的定位精度。
1 接触网巡检系统主要定位技术
1.1 轮速定位法
轮速定位法的原理是通过车轮转动使连接在车轮轴上的光栅盘将光源(发光二极管)变为断续光,进而带动光电模块中的光敏三极管进行通断运行。光电信号经过电路处理后,能够获得与速度成正比的方波脉冲,将脉冲信号送至车载计数器,根据脉冲数可以计算获得列车的里程数据。
铁路根据线路长度沿线设置公里标,列车采集轮速编码器信号并经累计换算,确定列车运行过程中在线路上的具体位置信息。轮速定位法易于实现,但主要缺点在于车轮磨损导致通过车轮直径获得的里程数据误差较大。而这种误差是线性累积的,即随着行驶里程的增加,其绝对误差会越来越大。这种定位方式的精度极大地受限于车轮空转和滑行。
1.2 RFID(射频识别)定位法
RFID技术是一种自动识别技术,通过射频信号自动识别目标对象,并获取相关数据。RFID系统一般由数据处理终端、电子标签、天线和阅读器构成。RFID定位法的优点在于地面应答器安装点的定位精度较高、维修费用低、使用寿命长,以及能在恶劣条件下稳定工作;其缺点为只能给出点式定位信息,且存在设置间距和投资成本等问题。
1.3 卫星导航定位法
随着卫星导航技术的不断发展,其在列车定位中的应用越来越广泛。目前,许多列车采用了GPS,只需在列车上安装GPS接收机,接收4颗以上的卫星信号就能够实现快速定位。但当列车进入隧道、山区及森林等地时,其GPS信号容易被遮挡;当列车处在并行线路上时,GPS易发生认错股道的现象。导致这些现象的原因是,GPS采用的是扩频通信,伪随机噪声码主要有精测距码和C/A(粗测距)码两种,由于一般民用接收机只能使用C/A码,经过处理后其定位精度降低了许多。
1.4 杆号识别定位法
杆号识别是接触网检测系统的一项基本功能。文献[5]提出了一种杆号识别方法,该方法基于OpenCV计算机视觉库,采用HOG(方向梯度直方图)特征提取和SVM(支持向量机)分类器将识别杆号与数据库匹配起来,进而获取列车的位置信息。但该定位方法需要采集和处理图片数据,存在一定的时间延迟。
2 接触网巡检系统空间综合定位方法
2.1 基本结构
本文提出的接触网巡检系统空间综合定位系统共有3层结构:第1层为外部接口层,主要为定位信息的服务接口;第2层为综合定位处理层,主要处理业务逻辑;第3层为硬件接入层,主要用于接入不同服务设备进行互联通信。空间综合定位系统结构示意图如图1所示。

注:MVB为多功能车辆总线。
2.2 系统组成
空间综合定位系统由数据采集、数据库、数据下发和参数设置4个模块组成,如图2所示。数据采集模块负责采集定位信号,计算出可靠的位置信息。数据库模块负责建立GPS公里标、RFID信息和杆号信息等基础线路信息数据库。数据下发模块负责将所获得的定位信息发送至其他模块。参数设置模块负责预设或在运行时设置线路信息。

图2 空间综合定位系统组成示意图
2.3 定位算法设计
空间综合定位算法需要结合所有接入的定位信息和基础数据库,才能获得列车当前的位置信息。所接入的硬件信息可以分为绝对定位信息和相对定位信息。绝对定位信息包括:GPS、RFID、MVB和人工校正。相对定位信息包括:锚段校正、杆号识别和速度传感器。空间综合定位算法需要结合绝对定位信息和相对定位信息才能精确定位,一般通过速度传感器计算当前位置,通过绝对定位设备及相对定位信息校正当前位置。
相对定位的执行条件为:无条件执行,只要收到相对定位信号,就进行无条件定位。
绝对定位需要满足以下任一条件,方可执行:
条件1,2εt<|s0-st|。
条件2,εt<εl。
式中:
εt——当前绝对定位信号误差;
s0——定位公里标;
st——当前公里标;
εl——最后一次绝对定位设备误差。
2.4 校正算法设计
2.4.1 锚段校正
锚段关节分为三跨非绝缘锚段关节、四跨绝缘锚段关节、五跨绝缘关节和七跨电分相锚段关节。由文献[6]可知,三跨、四跨、五跨锚段关节均由锚柱和转换柱组成,在最后一个转换柱前,两根接触线的导高相同,列车经过等高点后的第一个支柱即为该锚段关节的最后一个转换柱。通过识别该转换柱,同时结合支柱数据库,即可校正列车位置。
锚段校正示意图如图3所示。当雷达、照相机检测到列车经过等高点后,可以判断下一个支柱为最后一个转换柱。当列车经过等高点后,综合定位系统识别到的下一个支柱即为当前锚段关节内的最后一个转换柱。为避免误识别,在数据库内查找当前位置前后5个支柱范围内是否存在该转换柱,若存在,则将列车当前位置定位校正至该转换柱。

图3 锚段校正示意图
2.4.2 支柱触发信号校正
由于支柱的信号存在误识别,因此增加误识别剔除逻辑:若当前信号与上一次支柱信号位置小于等于15 m,即可判断为误识别。
2.4.3 GPS校正
由GPS数据库查找出的公里标并非实时校正的。GPS校正流程图如图4所示。当GPS定位点查询出的数据库公里标满足校正算法时,才可以将GPS数据库公里标设置为当前公里标。

图4 GPS校正流程图
2.4.4 RFID校正
RFID触发为连续触发,只有当RFID第一次触发时进行校正,其后若RFID连续触发,则系统将丢弃RFID触发信号。因此,RFID接收范围越小,触发精度越高。
2.4.5 MVB信号校正
MVB信号实际上就是运营列车提供的定位信号(各列车的MVB协议并不相同)。MVB信号的触发条件为:
2εm+εy<|lm0-lmt|
式中:
εm——MVB定位误差,即运营列车提供定位信号的误差;
εy——MVB延时误差;
lm0——MVB定位里程;
lmt——当前里程。
2.4.6 杆号识别校正
由于杆号算法有一定的延时误差,所以需引入杆号识别校正。为了进行杆号识别校正,空间综合定位系统需保存一段时间内所有速度传感器的定位信息,同时规定杆号识别必须在一段特定时间内完成。杆号识别校正流程图如图5所示。

图5 杆号识别校正流程图
2.5 定位校正优先级判定
综合定位系统由主定位和辅助定位方式构成,一般主定位采用速度传感器持续获得列车的行驶里程,辅助定位则是对主定位进行校正。对不同的应用场景、不同的检测载体(检测车)采用不同的主定位和辅助定位方式,不同定位方式的优先级有所不同。当综合定位系统同时接收到两个校正信号,其会自动选择最高优先级的辅助定位来对列车位置信息进行校正。
地铁运营车一般不能加装速度传感器,但可接入车辆的MVB信号(MVB信号包含速度、里程等信息)。地铁运营车定位校正优先级示意图如图6所示。地铁运营车属于无人值守设备,定位信息没有人为干预,故在辅助定位信息里未考虑到人工校准环节。起始公里标信息均从MVB信号中获得,地铁线路一般安装有RFID,其可通过RFID对列车位置进行精确定位。

图6 地铁运营车定位校正优先级示意图
MVB信号传输有一定的延迟,不同的车速会导致不同的定位信息误差,故在综合定位系统中增加开关门信息接入,以避免车速对定位的影响(开关门时车速为0)。锚段和支柱识别由于其本身的定位精度有限,故相较于其他辅助定位系统,二者的优先级较低。
3 空间综合定位系统试验数据分析
3.1 试验概况
以重庆轨道交通4号线为例,进行空间综合定位系统试验。该线路列车目前所具备的定位方式主要为MVB信号定位、RFID定位和锚段定位。分别取4号线下行线区段民安大道站—头塘站和线路上行线区段太平冲站—寸滩站为试验区段。上下行线各区段内的定位信息如表1所示。

表1 上下行线各区段内的定位信息
采集试验区段的速度信号和里程信号数据,可以获得上下行线试验区段的MVB信号数据曲线图,如图7所示。由图7可知,大部分时间段内,列车的运行速度均呈大幅度变化,说明频繁加减速会使列车发生轮轨蠕滑和空转,进而使列车的定位误差随着时间累积。
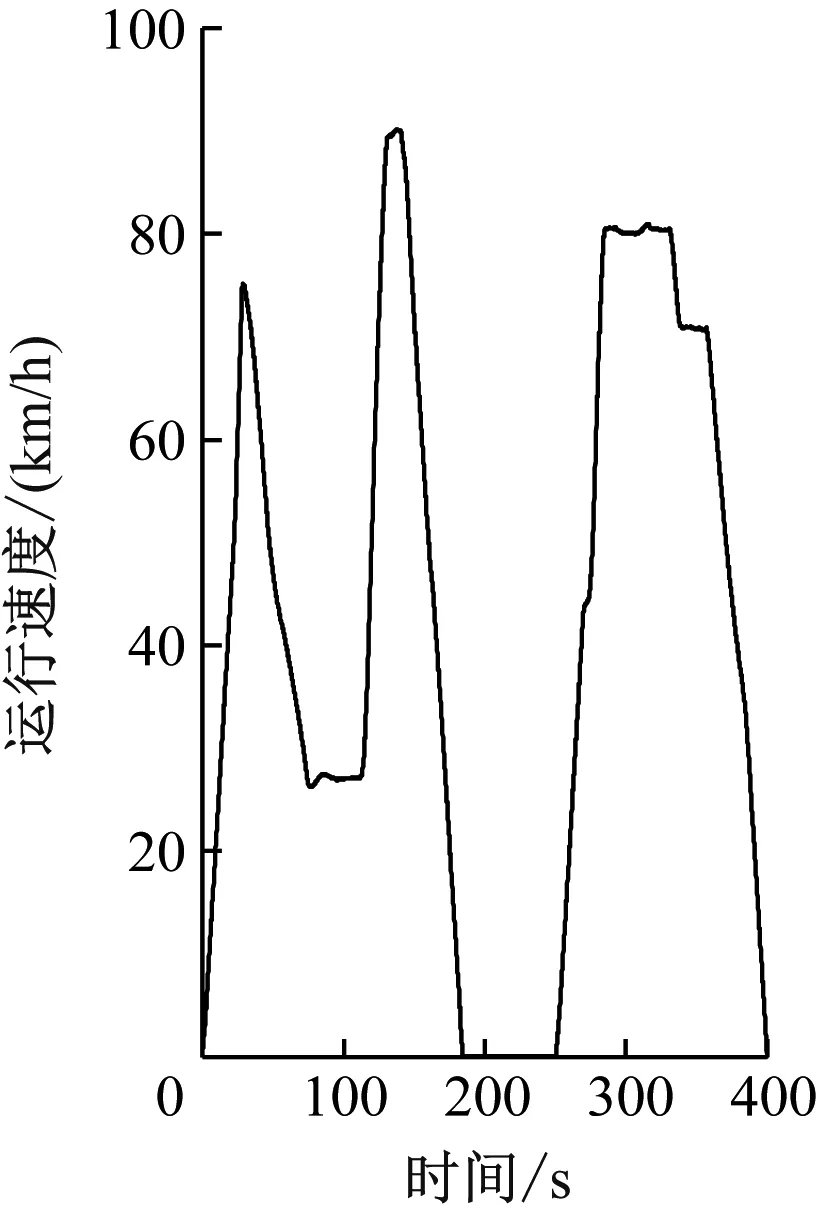
a) 下行线,速度-时间曲线
3.2 定位精度验证
为验证空间综合定位系统的定位精度,将MVB运行距离-时间曲线分别与RFID校正及锚段校正后的曲线进行对比,如图8所示。由图8可知,RFID和锚段校正均可以提高定位精度,且锚段校正的定位精度比RFID校正的定位精度更高,但是由于锚段识别可能存在误识别或漏杆等问题,可靠性不如RFID校正。
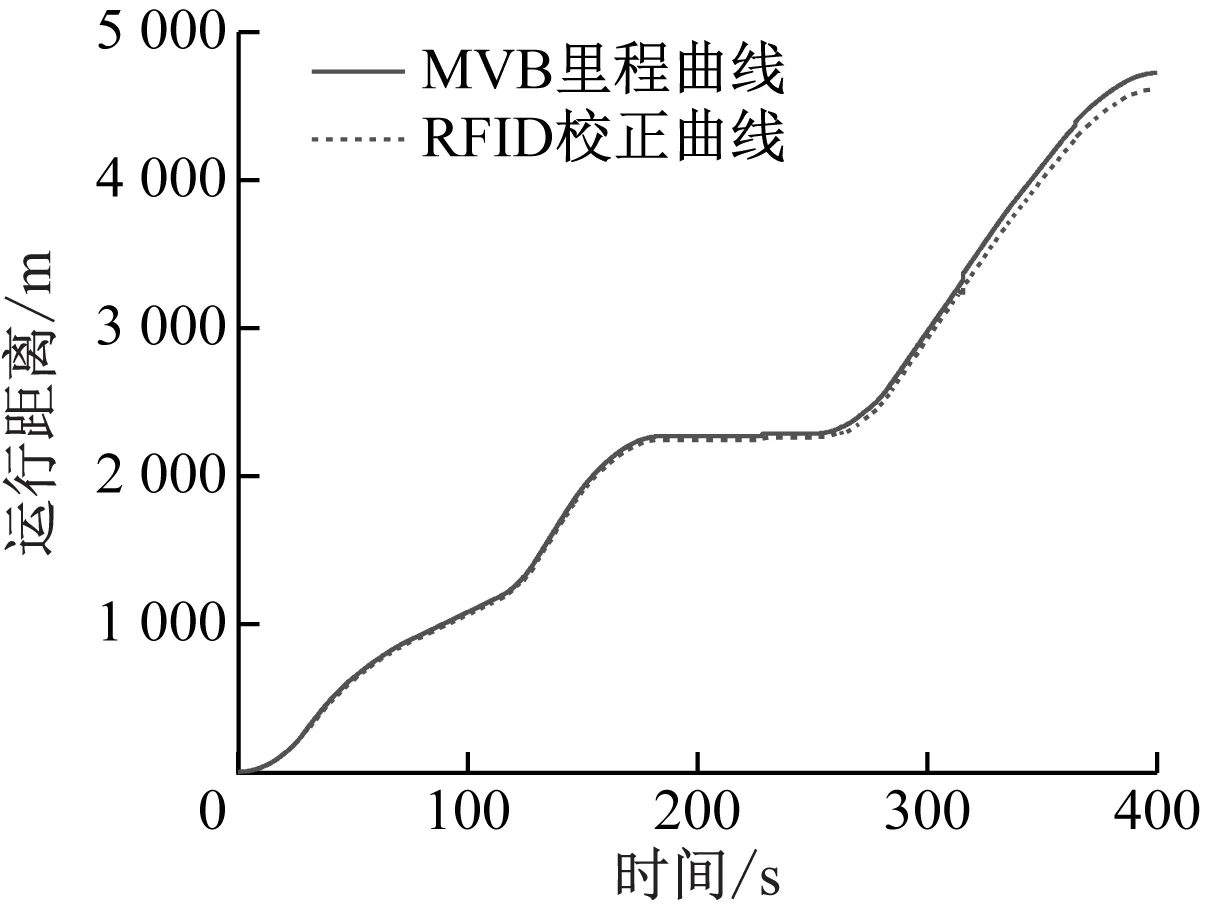
a) 下行线,与RFID校正对比
分别在两个试验区段中选取4个缺陷模拟点,采用不同定位方法的上下行线试验区段定位信息曲线对比如图9所示。由图9可知:在前100 s内,列车自带的MVB里程信息定位误差较小,可以较为精确地定位到第1个缺陷模拟点:随着时间的增加,列车位置信息的累积误差有所增大,导致里程信息产生了40 m左右的偏离;对于锚段定位校正和RFID定位校正,列车定位误差的修正效果并不理想,均存在20 m左右的误差;空间综合定位系统的列车定位误差获得了大幅度的修正,列车定位误差减小至5 m以内,能够较好地定位到后续缺陷点,进一步验证了所提空间综合定位系统的定位精度。

a) 下行线
4 结语
针对目前接触网巡检系统定位误差大、定位精度不高等问题,本文引入误差比较机制,提出一种空间综合定位方法。经过上线测试及相关验证表明,所提系统的定位精度达到了5 m,具有定位精度高、拓展性好等优点。所提系统的定位精度受限于定位技术,随着定位算法的改进及定位技术的发展,该综合定位方法的精度也会进一步有所提高。