移动机器人障碍感知的应用研究分析
2023-10-07黄振华肖银宝
黄振华 肖银宝
1.佛山科学技术学院机电工程与自动化学院 广东佛山 528225;2.嵩明县科学技术和工业信息化局 云南昆明 650000
1 概述
移动机器人对周围环境的感知与局部的路径规划也成为当今研究与应用领域的一大热点问题,无论是学校还是企业都在深耕这一块技术。自主移动机器人对于周边环境的精确感知也是局部路径规划的重要前提[1],自主移动机器人对所处环境的理解程度决定了其自主完成运动规划等任务的可能性,尤其在具有随机性和复杂性的环境。为了更好地理解室内外场景,提高机器人对环境的感知能力是一个有效途径。
自主移动机器人所配备的激光、深度视觉等外部传感器是其获取场景信息感知外部环境的主要途径[2]。激光传感器可以快速准确地获得场景的深度信息,利用三维激光测距传感器获取原始三维激光点云描述室外场景。将激光点拟合成平面描述环境,利用平面参数的变化修正自主移动平台的位姿,并实现三维环境导航。由于激光传感器缺乏颜色和纹理信息,对环境描述不全面,应用于复杂室外环境时会出现漏报和误报现象,给自主机器人的安全运行带来威胁[3]。

图1 雷达盲区情境
针对上述情况,尝试提出将激光信息和图像信息相融合的感知方式,利用视觉传感器获取的丰富物体或场景信息来弥补激光传感器的不足,从而增强物体或场景表达与信息[4]。深度视觉传感器则可以粗略地获得更丰富的外部场景信息,其常用于描述更丰富的场景。因此,在获得良好外界感知信息的条件下,可更好地为路径规划计算部分做好铺垫,才能更高质量地研究并改进下一层的路径规划算法。
2 研究方案
基于现有Turtlebot3移动平台无法进行局部三维障碍规避和粗糙地形下最优路径可达性规划问题出发,设计出用于移动平台粗糙地形下局部障碍感知与路径规划系统。
该系统能够通过测距传感器获取移动机器人前方一定距离环境点云信息,并将其和机器人的姿态估计融合构建出局部概率高程图。通过将高程图中一些障碍物和地形的几何信息抽象为可达性地图,再根据移动机器人的运动学性能和人为的约束条件结合可达性地图规划出一条可达性最高的路径,使得移动机器人在跟随全局规划器的路径同时做出平滑的局部避障动作。
上述研究方案可拆分为以下两大研究内容:
(1)地形与地面障碍物的栅格化高程地图表示的研究。通过移动平台搭载的距离测量传感器感知前方地形与地面障碍物,并通过处理传感器测量不确定性和位姿协方差矩阵来形式化高程映射框架,最后在栅格地图上实现移动平台局部概率地形高程图。

图2 高程图
(2)基于可达性地图的局部避障与路径规划的研究。结合移动平台的运动学性能、概率地形高程图和一些人为的约束条件设计一套局部路径规划器,使得移动平台能在粗糙地形下实现流畅的动态避障功能,并能够平滑地跟随全局规划器规划出来的路径。
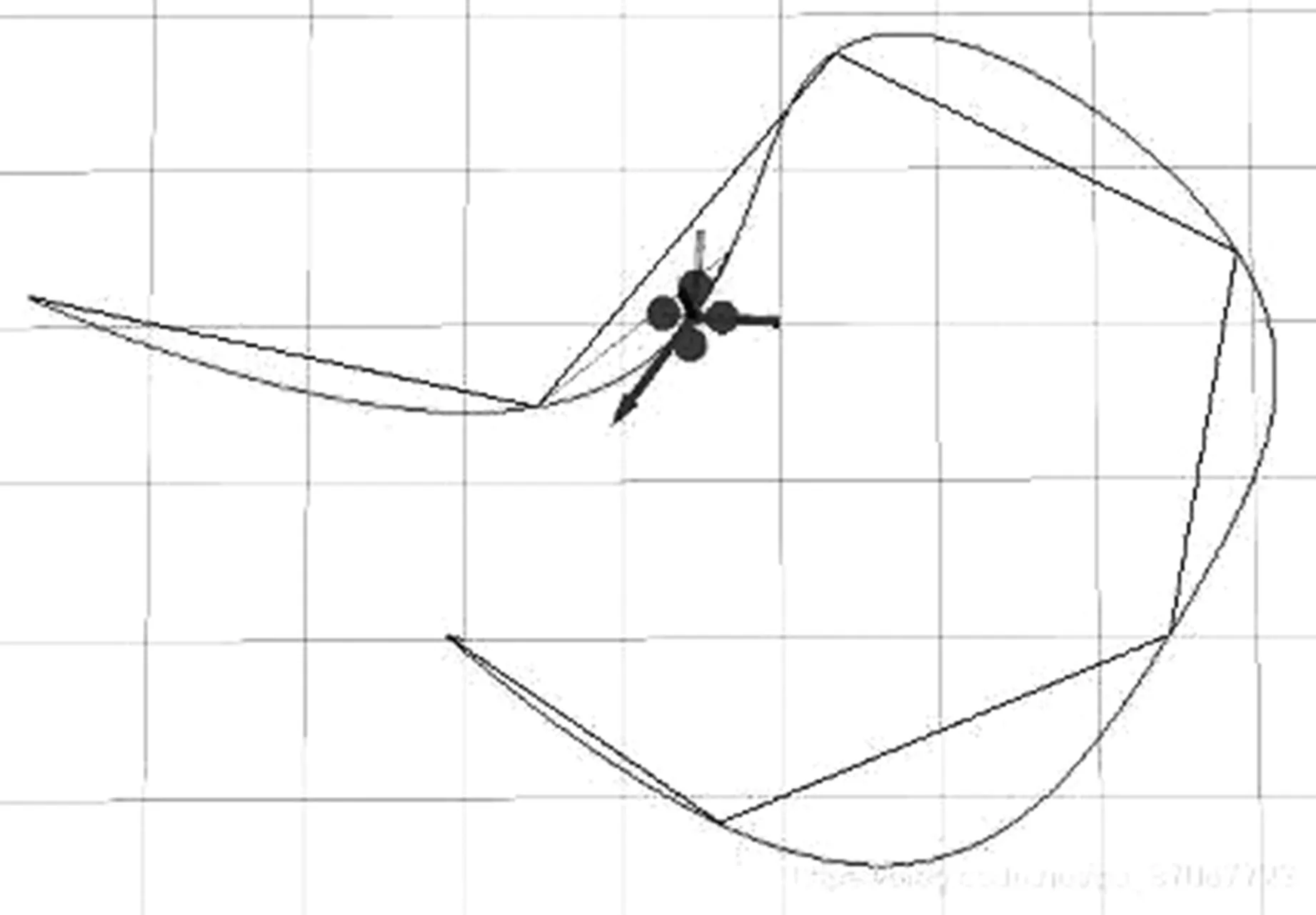
图3 路径规划图
3 技术步骤及路线
根据上述研究内容可拟定以下技术步骤和路线:
(1)以机器人为中心构建概率高程图。通过测距传感器获取移动机器人前方一定距离障碍物与地形信息,以移动平台为中心进行高程图的映射。映射出的每个单元格中存储了坐标、高度和方差信息。始终保持相对于移动平台进行距离测量,当机器人移动时,根据位姿估计不确定性的增量以及周围单元的估计值来更新每个单元的方差和均值,对局部不确定性和相邻单元格的处理用以估计高程图置信区域的上限和下限[5]。在任何时候,以移动平台为中心的高程图是从局部角度对地形的估计。一方面,前方的区域通常具有较高的精度,因为它通过平台前方的测距传感器的新测量值不断更新。另一方面,由于以移动平台相对位姿估计漂移,在传感器的视野之外(移动平台的下方或后方)的区域将会减少可信度概率。

图4 概率高程图
(2)基于概率高程图的可达性地图的构建。在获得高程图的数据之后,就需要相对应地建立可达性地图。可达性地图使用与高程图相同的网格形式,它在局部描述了基于三种不同地形特征的目标路径可达性,分别为局部坡度、局部地形粗糙度和局部垂直高度。使用单元格周围的圆形区域来计算网格中每个单元格的局部坡度、局部地形平整度和局部垂直高度的值,并且这些圆形的区域应该在传感器精度允许的范围内尽可能地小。通过对于这三种不同地形特征的分析,基本可以将移动平台运行环境中的几种常见障碍环境描述清楚,如地面上的斜坡、非规则形状独立障碍物、垂直的阶梯和地面坑洼等。

图5 可达性地图
(3)基于可达性地图与移动平台运动学性能的局部路径规划器的设计。局部路径规划器的目的就是在能够跟随全局路径规划器的全局最优路径的同时,在移动机器人的局部范围内对一些新增障碍与动态障碍做出一系列的规避动作,并在考虑机器人运动学性能的情况下局部修正和平滑全局规划器的轨迹。因此需要针对机器人的足迹模型设计成本函数,路径规划器计算出具有高可达性且短而平滑的目标路径并反映在成本函数中,最终计算出一条可达性最高且成本最低的路径作为跟随全局路径方向的局部路径,并作为移动机器人当前行驶的轨迹[6]。

图6 规划器路径规划效果
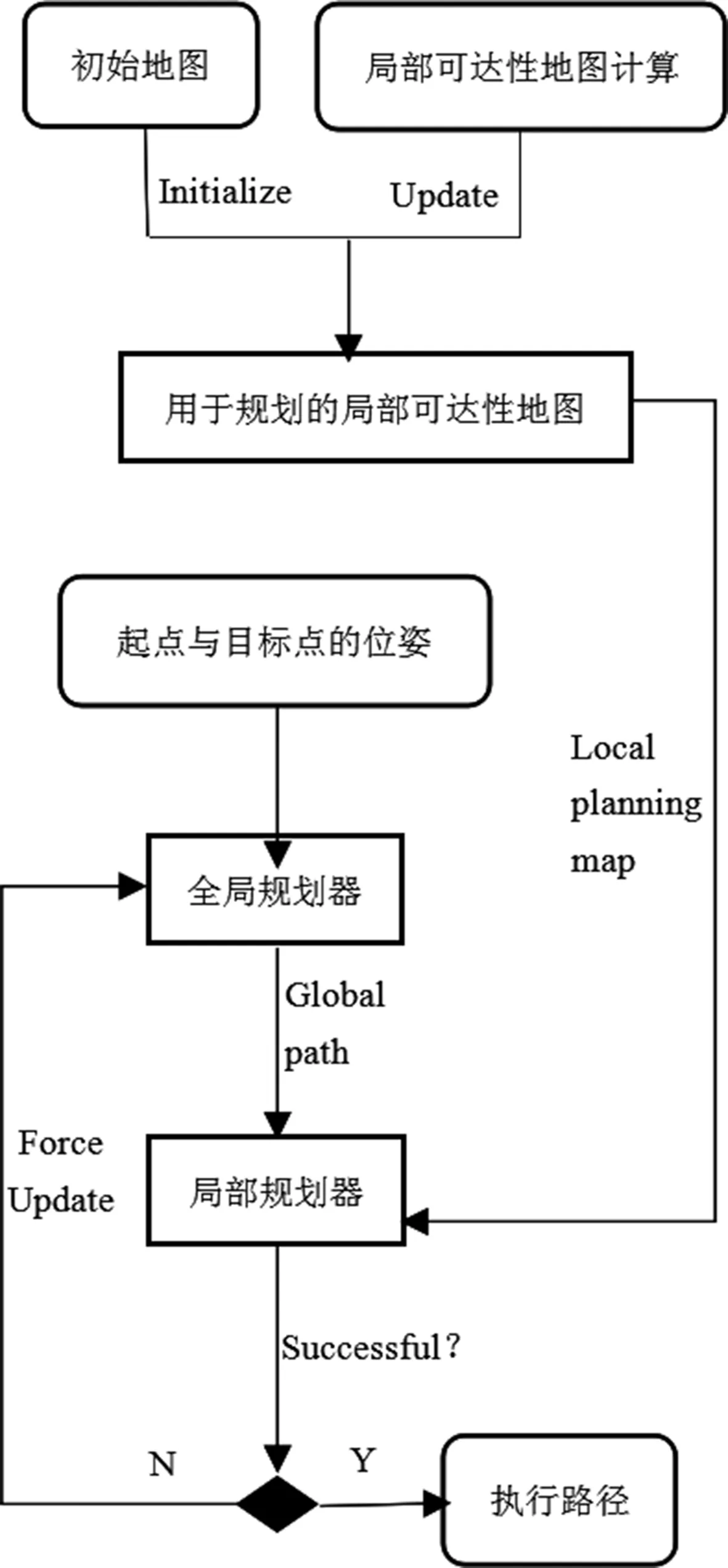
图7 技术路线图
4 分析总结
本课题主要研究智能制造领域移动机器人障碍感知与路径规划技术,预期提出并建立一套基于Turtlebot3平台的局部障碍感知与避障方案。

图8 仿真效果图
主要创新点:
(1)区别于以往对于三维空间障碍物直接投影压缩到二维平面的表示方法[7],本设计使用基于栅格的概率高程图表示地形与障碍物,使得高度可见,能够清晰地区分可越过障碍与不可越过障碍,使其后期规划算法的可操作性更大。
(2)可达性地图结合了障碍物中的一些几何特征信息、移动平台的足迹模型和部分运动学性能,大大提高了路径规划时的运动表现[8]。后期还可以考虑优化轨迹的规划,使得移动平台的运动更具人性化。
(3)对于地面移动机器人,基于高程图所设计的路径规划算法比基于二维栅格地图的路径规划算法有着针对高度障碍物的避障优势,同时又少了使用八叉树地图做三维路径规划中必须要搜索每一个分支子节点的大量计算[9],是一种对于实际应用来说性价比较高的方案。
(4)基于现有总结的路径规划算法的基础上,分析总结其独有的算法优劣性和适用的使用场景,最后根据得出的数据设计出一种针对复杂环境场景的规划器,该规划器主要在计算效率、路程最短和轨迹平滑三方面进行关键改进和优化[10]。
