基于多传感器信息融合与混合感受野残差卷积神经网络的调相机转子故障诊断
2023-09-28钱白云吕朝阳张维宁朱霄珣董利江吴玉华王鲁东李震涛
钱白云,吕朝阳,张维宁,林 翔,朱霄珣,董利江,吴玉华,王鲁东 ,李震涛
(1.国网新疆电力有限公司电力科学研究院,乌鲁木齐 830000;2.华北电力大学 动力工程系,河北 保定 071003;3.国网新疆电力有限公司,乌鲁木齐 830000;4.新疆新能集团有限责任公司乌鲁木齐电力建设调试所,乌鲁木齐 830000)
0 引言
如今风电、光伏等新能源正在大量并网,特高压直流输电技术也在不断发展,电网对无功调节的需求正在逐步提升。调相机作为大型无功调节设备,其无功增加能力与无功吸收能力均较强,可以在电网中增强电压的动态调节能力[1-3],凭借出色的动态无功补偿能力,调相机能够消除电力系统电压突然提高带来的不良影响,尤其在网侧,调相机能够快速、大量的吸收换相失败产生的无功功率,同时对无功进行快速补偿,保障系统无功的稳定[4]。因此,调相机的安全稳定运行尤其关键。
调相机作为一种典型的旋转机械设备,转子是其最主要的组成部分,若发生故障会导致机组停机,产生较大的经济损失,甚至威胁人身安全[5-6]。因此,针对调相机转子进行准确快速的智能故障诊断,对提升机组的安全性和经济性具有十分重要的意义。对于大型旋转机械设备而言,振动传感器布置测点丰富、经济性、准确性较高,因此针对振动信号进行分析是一种普遍的状态监测方法。目前国内外学者尝试在转子、轴承等旋转机械的故障诊断中分析振动信号的特征。文献[7]通过改进经验模态分解(EMD,empirical mode decomposition)对转子振动信号进行分析,有效定位了转子故障特征。文献[8]通过联合定子振动特性与磁密谐波的综合特征,实现了大型调相机转子偏心故障的识别。文献[9]提出一种可调品质因子小波变换方法,识别了早期轴承故障。然而转子振动信号的故障特征相对更微弱,极易被现场噪声或其他无关信号淹没,进而影响到对转子运行状态的判断。
随着数据挖掘和人工智能技术的不断发展,信号特征提取结合传统机器学习模型实现故障诊断的方法被广泛研究,如:人工神经网络(ANN,artificial neural network)、支持向量机 (support vector machines,SVM)、模糊识别[10-11]等。然而,实际工作时,设备工况经常发生变化,且许多信号特征提取方法无法在现场强噪声、多源干扰下分离并捕捉故障特征,同时浅层机器学习模型学习深度不足,在面临如今海量的工业数据时,此类方法的应用范围和诊断效果将受到制约[12]。
深度学习(DL,deep learning)的出现解决了信号处理方法特征提取能力有限和浅层机器学习中学习深度的问题[13]。而卷积神经网络CNN作为DL的一种特殊结构形式,是计算机视觉领域最强大的模型,因此最近受到了故障诊断领域研究人员的广泛关注[14]。文献[15]将原始信号转化为AE声谱图特征,结合CNN实现了转子碰摩故障的识别。文献[16]采用短时傅里叶变换将振动信号转化为时频图输入CNN,实现了滚动轴承的故障诊断。文献[17]通过希尔伯特变换 (HT,Hilbert transform)处理原始振动信号,并采用PSO算法对CNN参数进行优化,识别了5种转子故障。另外,多个传感器捕获的信号包含系统运行的更多信息。在过去几年里,基于CNN的多传感器数据信息的融合策略也被广泛应用于全面描述旋转机械设备状态,利用多传感器数据所具有的同步关联性,有助于提高模型诊断准确率和抗噪声干扰能力[18-19],合理利用多传感器信息且实现准确、快速诊断是需要重点关注的。
调相机转子和其它旋转设备的转子在基本机械结构原理上相似,均是将转子固定在转轴上,两端以轴承承托,但调相机设备的整体复杂程度决定了其转子结构相对复杂,其特点如下:大型调相机尺寸和重量大,工作转速跨越二阶临界转速,振型复杂,对运行工况和运行参数的变化敏感,因此调相机随不同运行条件具有多种振动状态。除此之外,其定转子上均有励磁绕组,振动并非单一的机械场,而是电磁-机械场相互耦合作用发生的结果,并且由于它的暂态反应能力和暂态过载能力强,导致其转子转速高,急起急停,内部温度场复杂多变,也会影响转子的振动状态。固使用通常转子故障诊断方法对调相机转子进行诊断,无法取得理想效果。
目前基于传统深度学习的转子故障诊断方法的优化主要以复杂化模型结构加深学习深度,但卷积神经网络的卷积、池化层堆叠,缺乏对故障特征不同尺度方向提取的考虑,并且过于复杂的模型堆叠会降低训练速度、耗费大量算力。从提高训练速度、分类精度和模型适应振动信号多尺度特性的角度,如何将数据可视化和分尺度特征提取与模型特征学习能力增强三者相结合是本文创新性研究的切入点。
基于以上研究,本文提出一种基于多传感器信息融合SDP图像联合多尺度CNN的调相机转子故障诊断方法。首先,基于使用对称点模式(SDP,Symmetrized dot pattern,)对调相机多个传感器的振动信息进行整体特征融合,以更全面的映射出识别对象的特征;在此基础上,构建混合感受野残差卷积神经网络(MRFCNN,Multi receptive field CNN),采用不同感受野的多尺度卷积核对SDP图进行全局特征学习。
1 对称点模式SDP
SDP算法可将复杂时间序列以散点的形式清晰映射在极坐标图中,可以使原始时域信号通过图形化的方式提高可视化能力[20]。因为极坐标图像的特殊性,多源信息可通过SDP方法融合在有限区域中。
在极坐标中xi与xi+1分别为时域信号中i时刻和i+1时刻的幅值,原信号通过SDP方法可变成极坐标空间s[r(i),θ(i),φ(i)]中的点,上述变量的计算公式为:
(1)
(2)
(3)
其中:xmax和xmin分别为原始时域波形信号的最大振幅和最小振幅;θ(i)和φ(i)分别为点对于镜像对称面而言,沿逆时针和顺时针方向偏转的角度;r(i)为点的极径;θ为规定的镜像对称面的偏转角度(θ=360m/n,m=1,2,…,n);ζ为增益系数(ζ<θ),SDP算法基本原理如图1所示。
一维信号经SDP变化后,可得到“花瓣状”的散点图,避免了传统信号处理方法导致的数据压缩与特征丢失。而不同类别的信号间的差异主要表现在:1)散点花瓣的曲率;2)散点分布和形状特征;3)几何中心位置。在同一极坐标系中,在不同象限可实现多个信号的信息融合,更加凸显差异性。
2 混合感受野残差卷积神经网络MRFRCNN
2.1 卷积神经网络CNN概述
卷积神经网络CNN可以从数据中自动学习并提取抽象的深度特征信息,在图像识别领域具有巨大潜力。CNN 对输入样本数据进行逐层卷积与池化,具有一定的旋转、平移不变性,被广泛应用于科研和工程领域。传统 CNN 包含卷积层、池化层、全连接层等,以下对CNN主要操作进行概述。
给定第l-1层的输入,则下一层的特征图为,对应的卷积层操作如下:
(4)

传统CNN中,池化层会对每一个卷积层提取到的数据进一步降维,加快计算速度且可以避免过拟合[21]。
经过多层学习,原始数据信息初步被抽象成更高级的特征,在网络的末尾(L层)由全连接层(FC)实现网络的最终分类,全连接操作如下:
zL=σ(wLyL-1+bL)
(5)
其中,yL-1为L-1层的神经元组,zL为L层的神经元组,wL,bL分别为全连接层的权重和偏置。对于多分类问题,全连接输出层激活函数为Softmax,通过有监督学习方式和反向传播算法进行训练,利用梯度下降法,经历多次迭代使损失函数Loss值达到小,从而完成训练。
不同的卷积核对图像信息的捕捉不同,而通常情况下,卷积核越大,感受野(receptive field)越大,看到的整体信息越多,捕捉的全局特征越好,但会导致计算量的激增。反之,卷积核越小,感受野越小,获得的局部信息会更加具体。
调相机各部件振动耦合会导致转子振动信号表现多尺度特性,且SDP图像包含多传感器同步信息。为获取更全面的特征并提升CNN模型的识别准确率,本文构建了包含残差模块的多感受野卷积神经网络,采用不同卷积核联合提取调相机振动特征。
2.2 MRFRCNN架构
针对传统CNN的结构中存在的缺点,并结合调相机故障信息存在的复杂特征,本文提出的混合感受野残差卷积神经网络MRFRCNN,其结构如图2所示。
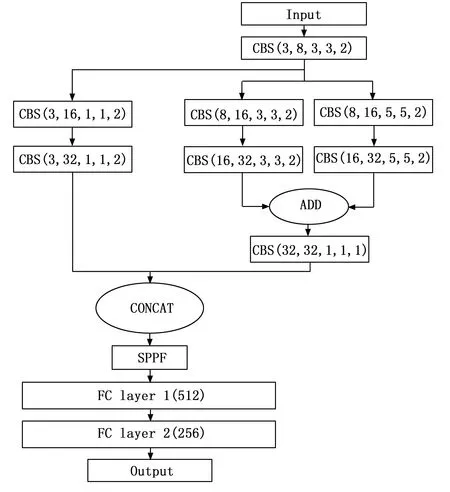
图2 MRFRCNN网络架构
其中,本架构中将传统卷积核后添加激活函数的操作改为:卷积操作+BN层+Silu激活函数(简称CBS层),实现在不同卷积特征提取后,将数据标准化并有效激活权重,CBS层的结构如图3所示。

图3 CBS层结构
传统的池化层即下采样层包括平均池(mean pooling)和最大池(max pooling)等等,一般直接连接在上一层卷积操作之后,可以对特征进行压缩、减小计算复杂度。但连续的池化层的堆积,难免导致丢失信息,也即降低了图像分辨率,某些蕴含故障信息的重要特征的丢失将给网络带来极大损失。因此在MRFRCNN网络构架中,用SPPF替代传统池化层,可以从全局角度出发,有效避免了对图像区域裁剪、缩放操作导致的图像失真等问题,避免对特征多次重复提取,提高了分类的精度,节省计算成本[22],SPPF的结构原理如图4所示。

图4 SPPF模块结构
假设输入层为128×128的原始图像,在通过第一个3×3卷积核的CBS层后,数据分流为3个支路,分别为支路1:1×1卷积CBS支路;支路2:3×3的CBS支路;支路3:5×5的CBS支路,因为各支路感受野不同,可以从多个尺度提取振动特征,达到特征融合的效果。三条支路均采用两个CBS层,核数量为16和32,步长均为2。其中支路2与支路3的输出进行ADD操作,随后通过1x1点卷积的CBS层,使数据流平稳,再与支路1的输出进行CONCAT操作,也即与支路1形成了残差连接,降低模型复杂度以防止过拟合,同时防止梯度消失或梯度爆炸。三条支路CONCAT后通过SPPF模块进行降维,使用多个窗口(pooling window),提取不同尺寸的空间特征信息,提升模型对于空间布局和物体变性的鲁棒性。最后为两层全连接层,并通过Softmax实现多分类。
3 实验验证
本文提到的SDP-MRFRCNN模型整体诊断流程如图5所示,实验过程模型按照如下环节进行。

图5 调相机多传感器信息融合与混合感受野卷积神经网络故障诊断流程图
3.1 数据来源
实验数据来自新疆乌鲁木齐天山站300 MVar大型同步调相机。该设备两端一端为盘车端,通过电机带动盘车齿轮进行盘车。另一端为励磁端,定子接入三相电流生成的旋转磁场以及转子接入直流电形成的稳定磁场共同维持转子转动,两端均由滑动轴承支撑,大型调相机实验机组实物及仿真结构结构示意图如图6所示。设备长期运行产生了碰摩,不平衡的转子故障,现场振动传感器布置于1号:盘车端x方向、2号:盘车端y方向、3号:励磁端x方向、4号:励磁端y方向,通过SKVMA振动监测分析仪进行采集,采样频率为6 666 Hz。本文所采用故障模式包含正常、碰摩、不平衡3种状态。

图6 新疆乌鲁木齐天山站300 MVar大型同步调相机
3.2 SDP多传感器信息融合
由前文可知,SDP 方法可以通过图像化的方式反映不同信号的特征,从而体现出调相机不同运行状态间的区别。首先,设置镜像对称面θ=45°,参数ξ=45°将调相机3种状态的4个单一传感器原始信号分别进行SDP分解,各自占满第一象限,形成一个清晰且对称的花瓣,如图7所示。

图7 SDP图像(单一传感器信息)
从图7可以看出,直接对单个采集通道进行SDP分析,调相机不同状态间已经可以体现出一定的区别,但由于4个传感器位置不同,也即包含信息不同,所以不同传感器采集的信号也是有差异的。因此,本文通过SDP 方法将4个传感器振动特征进行融合,设置镜像对称面θ=45°、θ=135°、θ=225°、θ=315°,参数θ=45°,也即从第一象限开始旋转,分别以1号、2号、3号、4号传感器信号作为输入,4个传感器的信号在极坐标每个象限各形成一对花瓣,形成最终的四花瓣图。通过将各传感器的振动信息融合起来,从整体突出状态特征的完整度和区分度,从而弥补单一特征成分导致的信息缺失。每种运行状态均随机抽取3张SDP图像作为展示,如图8所示。

图8 SDP图像(融合1、2、3、4号传感器信息)
由图8可以看出,单张SDP图像将调相机4个传感器的时域振动信号在有限范围内充分融合了起来,在保证不丢失特征的前提下,极大程度对数据量进行了压缩,而且更加体现不同出故障特征的可区分度。然而,通过人为识别图像特征往往需要大量的预先学习记忆,并且难以识别图像之间的小差异。另外,在工业大数据环境下,极高的采样率导致数据量的暴增,故人工识别无法满足快速、智能识别的需求。所以本文提出了基于MRFCNN的调相机故障SDP信息融合图像识别方法,即通过SDP-MRFCNN诊断模型实现调相机转子状态快速识别。
3.3 诊断实验
为验证本文方法的有效性,将经过信息融合的调相机振动SDP图像生成数据集,正常、碰摩、不平衡3种状态各250条数据,整体混合后设置随机数打乱数据后,以4:1的比例划分训练集和测试集,输入网络前3种状态被顺序编码为0、1、2。数据集的构成如表1所示。
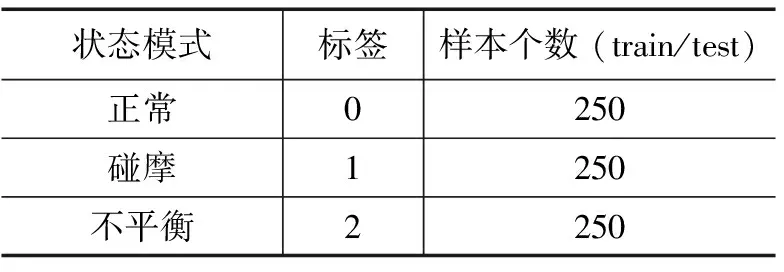
表1 数据集构成
基于以上数据集,在Pytorch环境下,搭建多感受野卷积神经网络进行诊断分类。设置网络学习率为0.000 1,批样本数为32,迭代50轮。模型训练后测试集上的结果表明,测试集最终识别精度达到了99.33%,模型在训练集和测试集上的效果曲线如图9所示。可以看出,模型在第10个epoch左右就达到了较高的精度并开始收敛,整个训练过程稳定,没有过拟合、欠拟合的现象出现,初步说明了本文诊断方法的优秀性。

图9 模型准确率曲线
为了更加清晰直观地评估模型效果,将测试集3种状态类别分类结果以热图形式绘制混淆矩阵,如图10所示。

图10 调相机故障样本分类混淆矩阵
图中坐标值0、1、2分别为表1中的标签编号,代表调相机的不同状态。阴影中的数字表示为实际样本标签和预测样本标签相符合的概率值,从混淆矩阵中可以看出测试的总样本中,除了类别1中有0.01的概率被误诊为类别0,其他预测样本的分类结果均正确。
同时,引入T-SNE方法对测试集数据分类后的全连接输出层数据进行降维处理,生成聚类簇,使结果进一步可视化,如图11所示。综合图10和图11可以看出,混淆矩阵的分类错误标签与T-SNE图中颜色簇的堆叠情况是相对应的。调相机的3种运行状态被错误分类的几率非常小,虽然仍可以观察到一定程度的错误诊断,但T-SNE聚类结果显示,不同类别间特征边界明显,同类别间特征分布紧凑。总体而言,测试结果表明,本文诊断方法取得了令人十分满意的分类结果。

图11 调相机故障样本分类T-SNE图
3.4 对比试验
3.4.1 SDP特征融合优越性
对1号传感器的振动数据,分别使用短时傅里叶变换STFT、小波变换WT、及非特征融合的SDP图(SoleSDP)即图7所示的未经融合的单一传感器SDP图,分别输入本文提出的MRFCNN网络结构中进行分类识别,同样以正常、碰摩、不平衡3种状态各250条数据整体混合后以4:1的比例划分训练集和测试集,实验结果如表2所示。

表2 对比实验结果
实验结果表明,同在本文提出的MRFCNN深度学习模型中,STFT和WT时频图作为特征输入时故障分类精度偏低,证明这两种传统时频分析图在调相机故障特征提取过程中对细微特征的提取能力较差;而方法3无融合的单一传感器SDP图和融合特征的SDP图实验结果比对,说明单一SDP图虽然较STFT和WT有更强的细微特征二维化表征能力,但是经多传感器融合后的SDP图对分类精度的提升有了更大的提升。
3.4.2 SDP-MRFCNN与其他模型对比
为了进一步说明所提SDP-MRFCNN深度学习网络架构有效性,选取了几种经典旋转机械故障诊断方法在本文数据集上进行测试,进行对比研究:1)EMD-SVM方法[23],使用EMD分解信号,构造IMF特征矩阵输入SVM进行状态识别;2)DBN方法[24],通过对多个传感器振动数据提取时域特征并融合,然后输入DBN网络,能够自适应融合多传感器数据完成分类任务;3)STFT-CNN方法[25],利用短时傅里叶变换将信号转化为时频图输入CNN进行诊断;4)SDP-CNN方法[26],将多传感器融合信息的SDP图像输入一个传统的CNN结构进行诊断分类;5)SDP-VGG[27],将单一传感器信号(本文采用3号传感器)进行SDP分析,得到相应SDP图像后,输入VGG网络结构中进行分类。6)本文所提SDP-MRFCNN方法,将多传感器融合信息的SDP图像输入一个包含多感受野和残差块以及SPPF池化的MRFCNN模型进行诊断分类。对比实验结果如表3所示。

表3 对比实验结果
由表2可知,本文方法识别准确率最高,达到了99.33%。其他方法的最高准确率仅达到了94.67%。虽然其他方法也在一定程度上实现了调相机转子故障诊断,但是在原始信号特征过于复杂时,很难以更高精度完成状态特征到识别结果的映射,极易造成误诊。特别地,方法4与本文方法十分类似,区别在于CNN结构不同,方法4采用了传统CNN,而本文针对传统CNN进行了有效改进;方法5则没有考虑多传感器信息融合的作用,仅利用单一传感器信息,单一传感器造成的设备状态运行特征不足,与传统诊断模型的特征提取能力弱,均限制了诊断精度的进一步升高。而本文方法SDP-MRFCNN在数据处理阶段通过SDP图像最小尺度的融合了调相机多传感器的振动信息,同时,MRFCNN模型结构避免了传统神经网络的单一感受野以及单支路卷积、池化的堆叠形式,具有更强大的特征提取能力,更利于调相机的故障诊断。
4 结束语
针对受现场强噪声干扰、故障特征复杂的调相机转子振动信号,本文提出了一种SDP-MRFCNN调相机转子故障诊断方法。该方法主要步骤如下:首先将来自现场设备4个不同方位传感器的振动信号通过SDP方法进行信息融合,获取全面、立体的设备运行状态特征;改进传统分类的CNN结构,构建多尺度、多感受野、具备更强特征学习能力的MRFCNN网络;最后,基于MRFCNN网络对融合信息的SDP图像进行识别,实现调相机转子设备智能故障诊断。通过两组对比实验分别验证了SDP多传感器信息融合以及MRFCNN网络的优越性,证明了SDP-MRFCNN模型在准确率上具有很大提升,达到了99.33%,大大提高了对于调相机振动信号特征学习效果与状态识别精度。但是,由于该模型以图形特征作为输入,对图片数量需求大,如何针对现场数据不平衡,克服故障样本量对网络的影响有待于进一步研究;同时如何在保证分类精度的前提下,对网络的轻量化研究也是一个改进方向。
