220 kV管母线周围无人机巡检电场安全距离研究
2023-09-27邓金锁刘庆达李心达
邓金锁,刘庆达,李心达
(1.东北电力大学,吉林 吉林 132012;2. 国网吉林供电公司,吉林 吉林 132011;3. 长春工程学院, 长春 130012)
0 引言
随着智能电网的快速发展,变电站巡检机器人被大量投入使用,变电站的安全巡检工作越来越智能化[1-3]。变电站母线支柱绝缘子多发生一些较为严重的事故[4-7],所以给支柱绝缘子的巡检维护工作提出了更高的要求。常用的人工巡检或者机器人巡检由于视角较低,很难准确检测到绝缘子缺陷。无人机具有视角灵活的独特优势,可以有效弥补人工和机器人巡检的不足。在无人机巡检应用过程中,众多学者已针对无人机飞行安全距离做了相应的研究。
为保证无人机的安全飞行,文献[8-9]利用双目测距原理,实现了无人机巡检安全距离的测量;文献[10]研究了无人机巡检±500 kV直流输电线路时的电磁场分布规律及放电特性,并结合试验确定了无人机巡线安全距离;文献[11-12]利用无人机激光点云确定了输电线路与周围物体之间的距离;文献[13]以平均电场强度(以下简称场强)作为约束,得出了无人机巡检500 kV猫头塔时的理论安全距离。综合来看,当前对于无人机巡检的安全距离研究主要集中于架空输电线路巡检作业方面,而对无人机巡检变电站设备的安全距离问题关注较少。同时,无人机与220 kV管母线间的安全距离问题当前尚未解决。
变电站设备集中布置,空间间隙相对较小,加之设备之间电磁耦合性强,导致变电站设备附近电场分布比输电线路复杂得多。设备周围空间的紧促性及电场分布的复杂性对无人机巡检安全距离提出了更高的要求。本文针对220 kV变电站,分析了无人机在巡检母线和支柱绝缘子时对空间电场的畸变程度,研究了无人机表面最大场强分布特征;通过放电测试平台,研究了无人机-母线间隙的起始放电电压,并以起始放电最大场强和起始放电平均场强作为约束,提出了无人机巡检220 kV管母线时的安全距离,研究结果为变电站无人机巡检作业提供数据支撑。
1 无人机表面电场分析
1.1 仿真模型
220 kV变电站母线及绝缘子结构见图1,其参数见表1。仿真时母线施加相量形式的电压激励,且偏严格考虑,设定母线电压比线路电压高10%,见公式(1)。绝缘子为两段式支柱绝缘子,瓷绝缘和中间金属部分的相对介电常数分别为4.2和1×1015。

表1 220 kV母线模型参数 单位:mm

图1 220 kV母线及绝缘子结构
(1)
变电站巡检无人机模型见图2。其中,4个机臂端的无刷直流电动机、云台和相机外壳均为电位悬浮的金属材质,是电场比较集中的部位;其余外壳部分均为复合塑料材质,相对介电常数为2。忽略机翼部分后,无人机仿真模型的几何尺寸为290 mm×290 mm×196 mm。
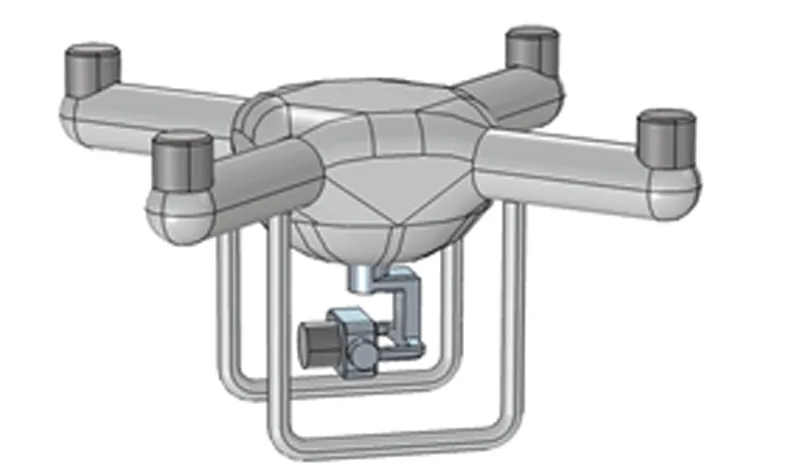
图2 无人机模型
1.2 无人机位于绝缘子周围时电场分布
变电站无人机在绝缘子周围巡检时其电动机和云台等金属部位会出现感应电荷和电场,并畸变原空间电场分布。图3(a)为没有无人机时绝缘子周围的空间电场分布,当绝缘子附近存在无人机时,电场分布见图3(b),此时无人机与B相母线水平间距为70 cm,可以看出无人机对应位置处的电场由0.94 kV/cm增大至5.10 kV/cm,这是由无人机金属部位上的感应电荷所致;B相-C相母线间隙的电场分布见图3(c),可以进一步看出无人机对电场的畸变程度,畸变后的电场约为原值的5倍。

图3 无人机引起的电场畸变
无人机在巡视支柱绝缘子时需要不断改变位置,本文选择B相支柱绝缘子右侧空间88个位置进行电场计算,见图4。为准确描述无人机表面电场与位置之间的关系,以B相母线所在位置为原点,以B相指向C相母线方向为水平方向,以沿B相支柱绝缘子向下为竖直方向建立直角坐标系,以(30,0)作为无人机初始位置,水平和垂直方向上的步长分别为40 cm和30 cm。无人机处于不同位置时,其表面最大场强变化趋势见图5。
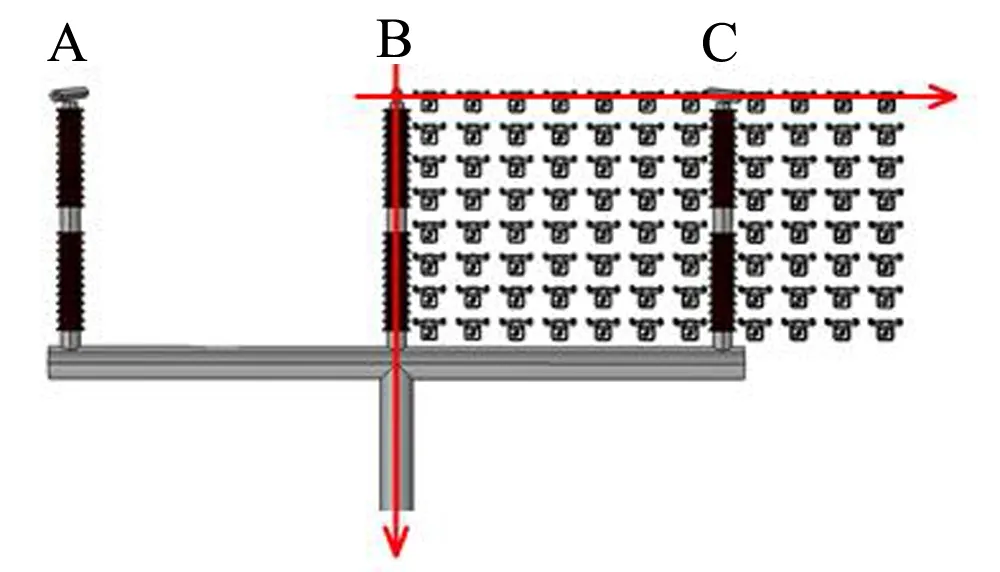
图4 绝缘子周围巡检区域
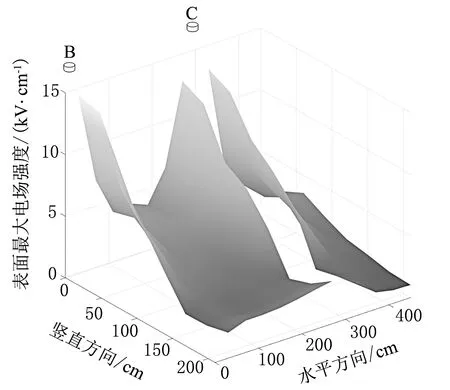
图5 无人机表面最大电场分布
由图5可以看出,在水平方向上,无人机越靠近B相或者C相母线,其表面场强最大值越大,在B相和C相母线之间整体呈“U”型分布;在竖直方向上,场强最大值随垂直距离增加而逐渐减小,即无人机与母线处于同一高度时场强最大;在本文讨论的空间范围内,当无人机处于(30,0)位置时,其表面最大场强取得最大值14.49 kV/cm,此时无人机在水平和垂直两个方向上均距离B相母线最近。另外,当无人机靠近支柱绝缘子下方金属横杆时,其表面最大场强有略微增大的趋势;当无人机位于C相绝缘子右侧时,其表面场强最大值随距离的增大而迅速衰减。
1.3 无人机位于母线下方时电场分布
无人机巡检作业时可能位于母线正下方,为确定此时其表面最大电场分布规律,以无人机处于C相母线正下方为例进行分析(见图6),空间位置的选取及描述与前述类似。

图6 母线下方巡检区域
无人机表面最大场强与其空间位置的关系见图7。由图7可以看出,在竖直方向上,随距离增加场强最大值迅速减小,当竖直距离大于100 cm时,场强最大值衰减趋势明显减缓;在水平方向上,场强最大值变化不明显,只是在接近两段绝缘子中间部位的金属导体时,场强有所增加,这是由导体的静电感应电荷引起。当无人机位于初始位置(30,5)时,其表面的最大场强为24.0 kV/cm,此时无人机与母线和支柱绝缘子的位置最近。从整体来看,无人机的水平坐标大于70 cm时,其表面最大场强与竖直距离的关系相同,即不再受绝缘子的影响。

图7 无人机在母线下方时表面电场分布
2 放电试验及巡检安全距离
2.1 直流电动机-母线间隙放电试验
上述仿真中无人机表面最大场强均出现在机臂端的无刷直流电机上,因此,电机部位容易产生放电并与母线之间形成放电发展通道。本节开展电动机-母线间隙的放电试验研究,接线见图8。母线与电动机置于绝缘平台上构成放电间隙;母线端部缠绕绝缘胶带,防止局部场强畸变引发电晕;绝缘平台整体放在支柱型绝缘子上,离地高度约为1.7 m;工频试验变压器型号为YDTW-500 kV/500 kVA,额定输出电压为500 kV。试验时将间隙分别设置为5 cm、10 cm、15 cm、25 cm、35 cm、45 cm、50 cm、55 cm,每个间隙做10次放电试验,且每2次放电试验间隔5 min以上,使绝缘平台上的空气充分恢复,尽量保证试验的精确性。
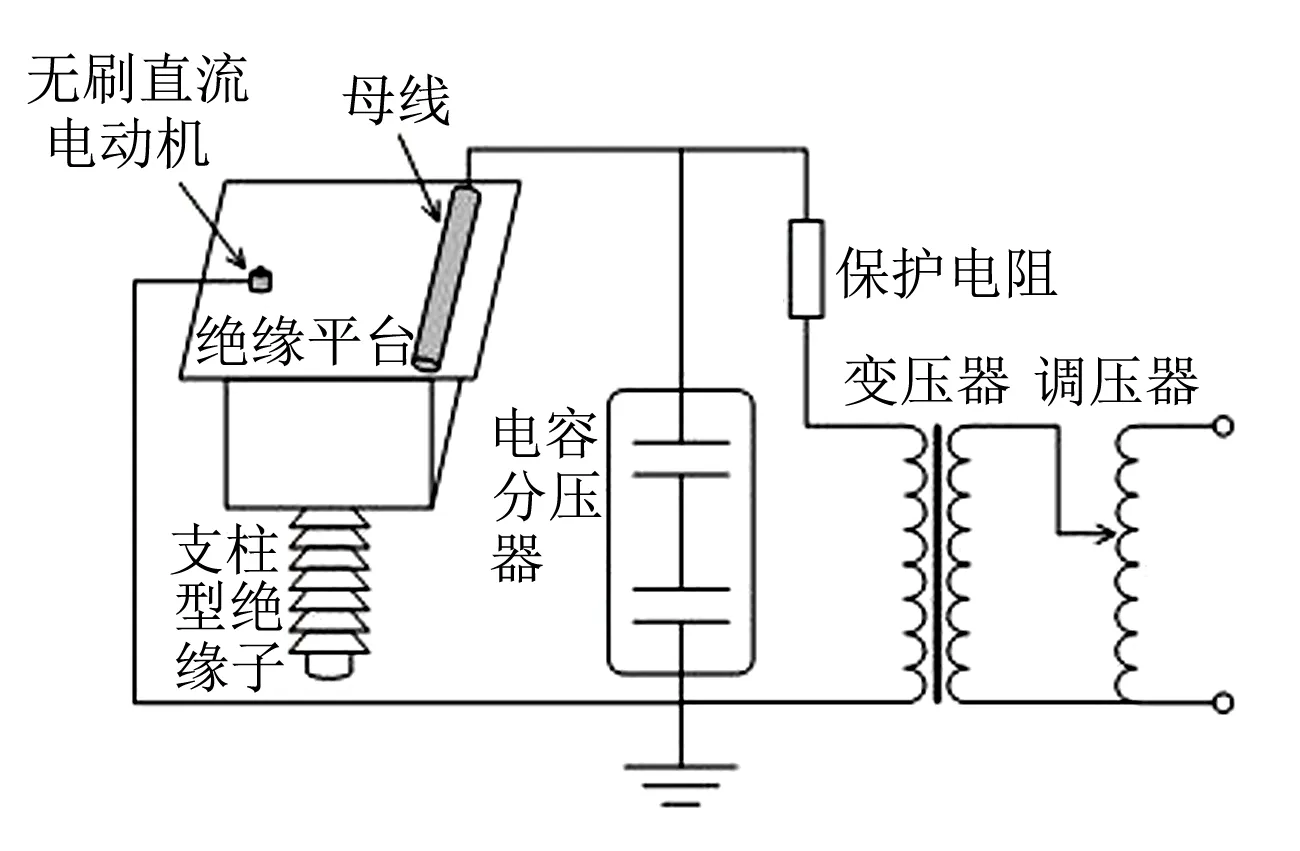
图8 试验接线
将各间隙的10次放电电压取平均值,得到各间隙的平均放电电压,并计算对应的平均场强,结果见表2。当间隙距离较小时,其平均场强较大;随着间隙距离的增大,其平均场强会逐渐减小。这主要是因为无刷直流电动机与母线均为圆柱体,当间隙较小时,电场分布比较均匀,间隙可等效为球-球间隙;而间隙较大时,电场不均匀程度加剧,只能视为棒-棒间隙,此时间隙的平均放电场强较小。无人机现场巡检作业时,不可能距离母线太近,所以无人机与母线间的间隙可视为棒-棒间隙处理。
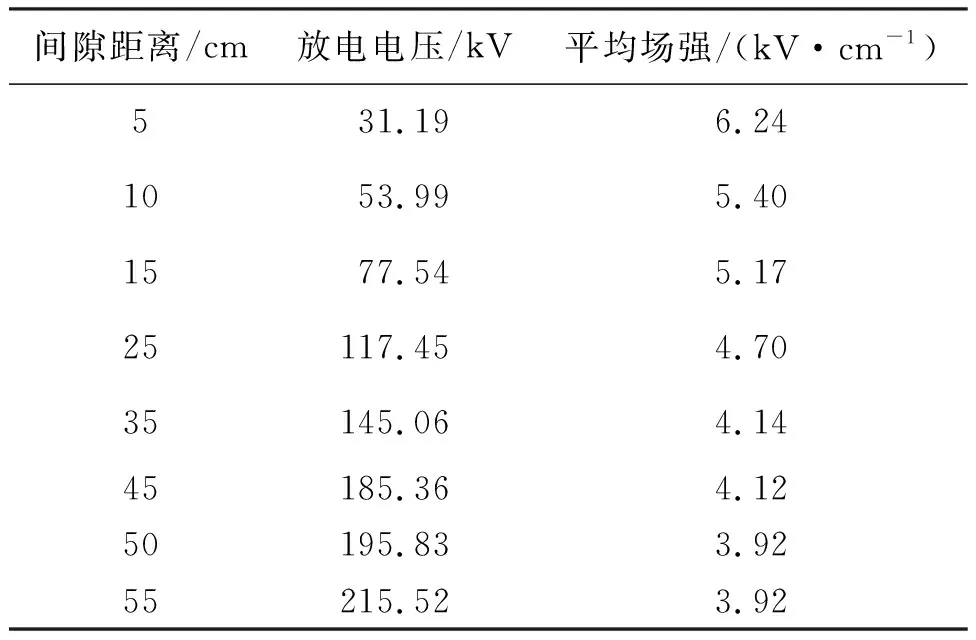
表2 电动机-母线间隙的放电电压和平均场强
间隙放电不仅和间隙距离有关,也和电极形状即电极附近电场分布有关,对电动机-母线间隙放电瞬间电场进行分析,得到电动机表面最大场强,当间隙距离为50 cm时,放电电压为196 kV,此时电动机表面最大电场为8.69 kV/cm;其他间隙距离下电动机表面最大电场见表3。可以看出,随着间隙距离的增大,电动机表面最大电场逐渐增加。

表3 试验各间隙放电时电动机表面最大场强
本节采用表2中的平均场强和表3中的表面最大场强作为约束确定220 kV变电站无人机巡检安全距离。前述已经通过仿真得出了无人机位于绝缘子周围及母线下方时的表面最大场强(见图5、图7)。
2.2 无人机巡检安全距离
当无人机位于绝缘子周围且与母线同高时,对应的间隙平均场强见图9(a),可以看出,场强曲线呈左右对称分布;本次选取无人机-B相母线间隙(左侧)进行分析,此时间隙平均场强的仿真值和试验值见图9(b),可以看出,以平均场强作为约束,无人机与母线之间的最小安全距离为10 cm;同理,以无人机表面最大场强作为约束,得到的最小安全距离为25 cm,见图9(c)。
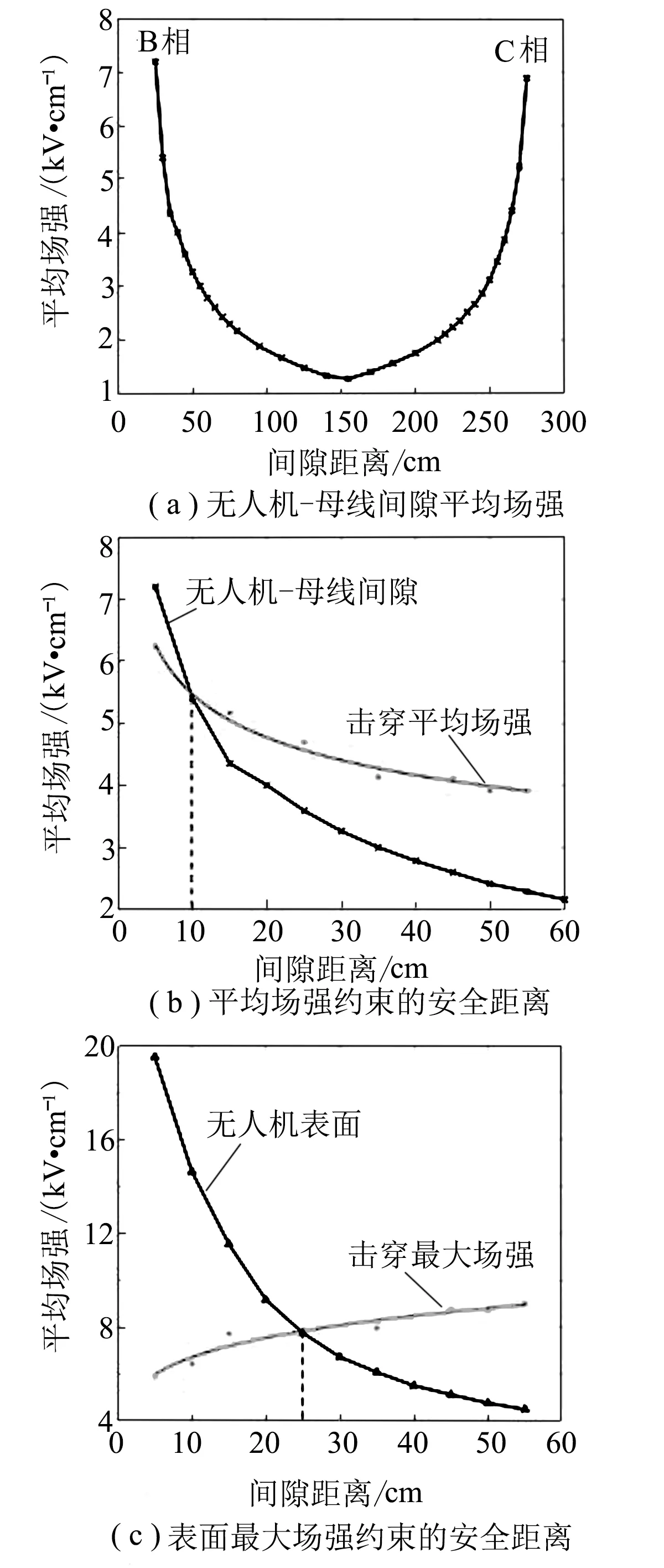
图9 无人机与母线同高时的安全距离
当无人机处于母线下方巡检时,通过2种场强约束得出的最小安全距离分别约为16 cm和40 cm,见图10。由以上分析可知,通过最大场强约束得到的安全距离比平均场强约束的距离大,这是因为用后者确定安全距离时未能充分考虑无人机表面结构对场强分布和放电过程的影响。
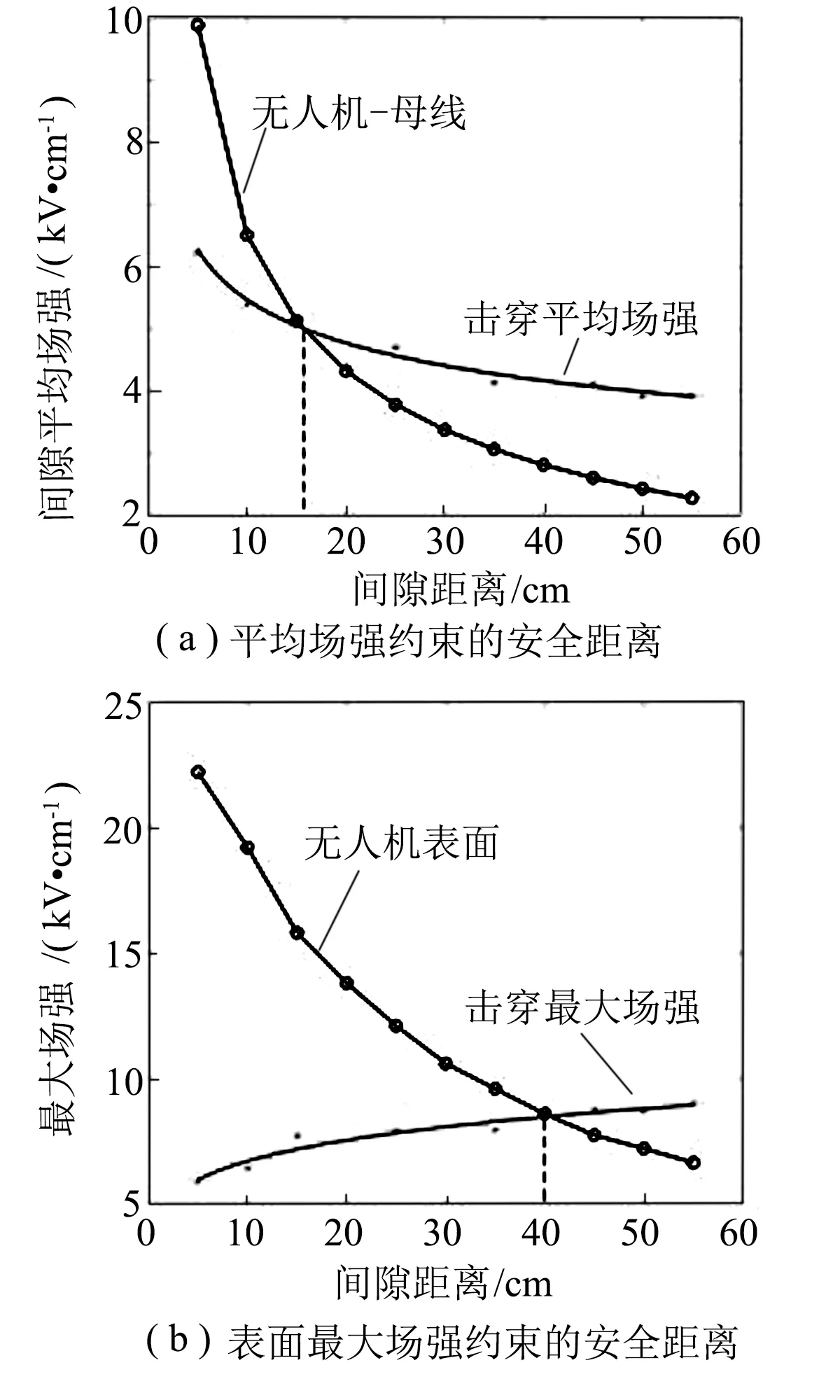
图10 无人机处于母线下方时的安全距离
综上所述,为确保220 kV变电站无人机安全巡检作业,避免放电现象的发生,当无人机与母线同高度巡检时,应使无人机与母线之间的距离保持在25 cm以上;当无人机处于母线下方巡检时,应使无人机上端部与母线之间的距离保持在40 cm以上。
3 结论
本文通过有限元数值计算和间隙放电试验研究了220 kV变电站无人机巡检作业时的安全距离,以起始放电时无人机表面最大场强及无人机-母线间隙平均场强作为约束,确定了无人机巡检临界安全距离,即无人机与母线同高度巡检时,两者之间的临界安全距离为25 cm;无人机位于母线下方巡检时,两者之间的临界安全距离为40 cm。