基于Coanda 脉冲射流的D 型体主动减阻控制研究
2023-09-25张世雄白宏磊
张世雄,白宏磊
中山大学 深圳校区(中山大学·深圳) 航空航天学院,深圳 518107
0 引 言
钝体绕流问题是航空航天工程、风工程及海洋工程中的常见问题。D 型体绕流是钝体绕流的基本模型之一,如高速公路上行驶的货运卡车及其周围的流动即可简化为D 型体绕流问题。D 型体绕流涉及边界层流动、流动分离、自由剪切层,以及旋涡发展演化、脱落和相互作用等[1]。D 型体所受气动阻力主要来源于前后压差阻力,与尾缘流动分离及近尾流流动结构紧密联系。因此,对D 型体近尾流进行有效干扰或控制,可以提升背压、降低压差阻力[2]。
修改D 型体尾缘和背部几何形状,或在D 型体背部附近放置干扰小圆柱,能够影响或改变D 型体近尾流流动结构,使其背压恢复、压差阻力降低。这些措施无需输入外界能量,属于被动控制方式。Tombazis 和Bearman[3]沿展向将D 型体背部修改为正弦波形状,并研究了正弦波长对减阻效果的影响。在风洞实验(基于来流速度u∞和D 型体高度H 的雷诺数Re=4.0 × 104)中,发现旋涡在背部正弦波的波峰处发生分裂,部分旋涡在波谷处合并;当波长为3.5H 时,时均背压系数最大提高36%。Park 等[4]在D 型体尾缘上下侧面安装了沿展向排列的矩形凸起,在风洞实验(Re=4 × 104)中,这些凸起有效减小了D 型体近尾流中的旋涡脱落强度,改变了旋涡脱落的相位差,破坏了自然流动的卡门涡街结构。当凸起高度、宽度和间距分别为0.067H、0.2H 和1.667H 时,D 型体背压提高了33%。Thiria等[5]在D 型体尾缘下游流向0.5H、竖向距D 型体中心0.6H 处放置一个小圆柱体(直径为0.12H),以直接干扰尾缘处的分离剪切层。在风洞实验(Re=5 ×103~5 × 104)中,观察到受干扰的D 型体近尾流区域内的回流气泡变长为自然流动情况下的1.4 倍,对应17.5%的减阻率。上述研究表明:在一定条件下,被动控制方式能有效干扰D 型体近尾流流动,实现减阻,但是,随着流动条件(如雷诺数、流动的三维效应)变化,这些被动控制方式的减阻效果会降低甚至消失[6]。
与被动控制方式不同,主动控制方式需要输入外界能量,以实现多种控制参数组合及达到最优化控制目标。研究者采用开环或闭环方式及不同优化算法对D 型体绕流进行主动控制,以实现最大程度的减阻。Gao 等[7]通过改变合成吹吸射流(射流位于尾缘处,与流向成45°)的强度和频率,对D 型体近尾流进行开环控制。在射流动量系数大于0.05%、射流频率约为2/3 自然流动旋涡脱落频率的同向激励下获得了减阻效果,最大减阻率约为5%;在射流频率接近自然流动旋涡脱落频率的反向激励下,D 型体的阻力大幅上升。同样基于尾缘处的45°合成吹吸射流扰动,Henning 等[8]选取D 型体背部压力作为反馈信号,以闭环方式对近尾流进行主动控制(Re=4 × 104)。采用基于线性黑箱模型的鲁棒控制器和极值搜索控制器,在射流动量系数为0.2%、无量纲射流频率fA∗=fAH/u∞=0.17、驱动信号相位与D 型体上侧旋涡脱落相位差为180°的同向射流驱动下,获得了最大时均背压增量35%(对应减阻率约为10%)。采用与文献[8]相同的装置,Pastoor等[9]基于风洞实验(Re=2.3 × 104~ 7.0 × 104),在开环实验中获得了40%的最大背压增量,对应减阻率约为15%,对应射流动量系数为0.9%、无量纲射流频率为0.15、上下射流相位差为0°(即同相位)。基于开环实验结果,采用斜率搜索方式对D 型体绕流进行闭环控制,获得最大背压增量40%(对应射流动量系数为0.6%);同时,在最优控制参数下,观察到D 型体近尾流旋涡脱落不对称性减弱,回流区增大。
Oswald 等[10]在D 型体背部设置了不同于45°合成射流的Coanda 效应装置,结合水平脉冲射流对D 型体绕流进行主动减阻控制(Re=5.4 × 104)。在开环实验中,获得的最大减阻率为56%(对应的射流动量系数为0.16、无量纲射流频率为0.65~0.85、射流占空比为50%)。此外,还研究了不同参数对节能率(即节约的能量与总能量之比)的影响:当射流动量系数为4%、无量纲射流频率为0.25~0.35、射流占空比为50%时,获得的最大节能率约为0.22,对应减阻率为33%。基于开环实验结果,在射流动量系数为4%的条件下进行了闭环实验,采用机器学习优化算法(遗传编程)对射流驱动信号寻优,以时均阻力作为目标函数,获得最大减阻率27%,对应的节能率约为0.145;以阻力和动量系数之和作为目标函数,获得最大节能率0.154。
同样采用Coanda 水平射流的方式,Shaqarin等[11]基于不同雷诺数下的风洞实验,在开环实验中获得了约45%的最大减阻率(Re=3.45 × 104,射流速度为7.5u∞,无量纲射流频率为0.31,射流占空比为50%)及40%的最大减阻率(Re=5.50 × 104,射流速度为4.7u∞、无量纲射流频率为1.3,射流占空比为50%)。进一步地,采用线性参数控制器,以脉动压力作为反馈信号,在不断变化的流动条件下(u∞=12~16 m/s)进行闭环控制,实现了减阻率保持40%不变。研究结果表明,采用Coanda 脉冲射流能够更有效地控制D 型体近尾流流动、实现更好的减阻效果[11]。表1 对上述D 型体减阻问题研究进展进行了归纳总结。

表1 D 型体减阻问题研究进展总结Table 1 Summery of previous study of D-shaped cylinder drag reduction
此外,对于高速可压缩流动,Abramson 等[12]尝试在亚声速风洞实验中采用Coanda 恒定射流对翼型尾缘流动进行控制。在开环实验中观察到:当马赫数Ma=0.3~0.7 时,Coanda 恒定射流控制能够增大翼型升力;当Ma 增大至0.7~0.8 时,即使Coanda恒定射流的动量系数达到1.5%,对翼型流动的控制效果也很微弱。
总之,基于Coanda 脉冲射流的控制方式不仅受到诸多参数(包括Coanda 效应装置的位置和尺寸,脉冲射流的强度、频率和占空比,上下侧射流的相位差等)的影响,而且还会受到流动条件的影响。
遗传算法是机器学习中的一种进化算法,能够在复杂的参数空间中搜寻全局最优解。遗传算法已被应用于钝体绕流主动减阻控制,取得了令人满意的效果[13]。Chan 等[14]结合二维数值模拟与遗传算法,以能量系数作为目标函数,对Savonius 风力机叶片形状进行优化,获得了33%的能量系数增幅。Qiao 等[15]基于合成射流方式对偏航角10°的钝体进行主动减阻控制,采用遗传算法优化了控制参数,获得了20%的最大减阻率(左、右无量纲射流频率分别为1.42 和3.84,左、右射流速度分别为0.63u∞和0.67u∞),发现射流抑制了尾流的旋涡脱落,减小了流动分离区域,稳定了钝体近尾流。
综上所述,目前与D 型体主动控制减阻问题相关的研究仍有不足之处。Oswald 等[10]仅讨论了射流频率对减阻效果的影响,尚未深入研究最优控制参数组合;在Henning[8]、Pastoor[9]、Shaqarin[11]等的闭环控制方式中,控制器均采用降阶线性控制器,对复杂湍流流动进行了简化,最优减阻效果仍有待进一步探究。基于Coanda 脉冲射流的D 型体减阻主动控制问题涉及诸多控制参数(如射流的强度、频率和相位差等),需要开展深入研究。
本文结合Coanda 脉冲射流及遗传算法,对D 型体近尾流进行主动闭环控制。选取D 型体时均背压作为遗传算法的目标函数;控制参数包括脉冲射流驱动压力(反映射流强度)、射流频率、射流占空比,以及上下侧射流相位差。实验在风洞中进行,基于来流速度u∞和D 型体高度H 的雷诺数为1.8 ×104。另外,还采用烟流显示技术直观展现最优控制下的D 型体近尾流流动结构变化情况。
1 实验安排与控制方法
1.1 D 型体模型及Coanda 脉冲射流
如图1(a)所示,D 型体模型高度H=0.03 m,长度L=3.6H,前缘半径 r1=0.35H,展向宽度W=8.3H。在D 型体背部上下侧设置高度为H/30(即1 mm)、展向宽度为6.7H 的缝隙,以产生水平方向的射流。参考Semaan[16]的研究工作,在D 型体背部上下侧射流出口处对称放置1/4 圆柱(半径为0.2H)作为Coanda 装置。在D 型体背部布置21 个测压点(按3 × 7 的方式排列),以测量背压分布情况,如图1(b)所示。

图1 D 型体(对称面视图)、Coanda 脉冲射流示意图及背部压力测点Fig.1 Diagram of the D-shaped cylinder with Coanda pulsation jets and distributions of the pressure tabs on the base
以压缩空气作为射流气源。如图1(a)所示,压缩空气经电磁阀组进入D 型体内部,再经双三次曲线腔体扩张后进入背部上下侧狭缝,最后绕经1/4 圆柱表面形成Coanda 射流。电磁阀组由压力比例阀和高频电磁阀组成,分别控制射流驱动压力(pj)和射流频率(fA)。射流占空比(RDC)以高频电磁阀占空比调节。上下侧气路单独控制,便于调节上下侧射流之间的相位差(Δϕ)。
1.2 风洞实验
实验在直流式低速闭口风洞进行。实验段总长0.6 m,横截面尺寸0.25 m × 0.25 m。如图2 所示,D 型体模型横跨实验段中部水平放置,前缘距实验段入口0.1 m。模型阻塞比为12%,需对来流速度进行修正[17]。实验中,基于D 型体高度H 及修正后的来流速度u∞,c的雷诺数Re=1.8 × 104。

图2 D 型体模型风洞实验现场图片Fig.2 Photo of the experimental setup
在风洞实验中,使用航华PSU32 压力扫描阀(量程 ± 1 kPa,精度0.1%,32 通道,频响1 kHz)采集D 型体背部压力,采样频率为2 kHz,采样时间为30 s(对应2 200 个自然流动旋涡脱落周期)。D 型体背压测孔内径为1 mm,通过70 cm 长的PU 管与压力扫描阀连接(基于固有频率和频率响应测试,本文采用的背压测量系统能够准确分辨D 型体近尾流中的主要频率成分)。在D 型体近尾流受到控制干扰的情况下,采集背压的开始时刻设置为射流控制开启后5 s,以确保射流与D 型体近尾流充分作用。
在相同雷诺数下,采用烟流技术对无控制(即自然流动)及有控制的D 型体近尾流流动结构进行直观显示。实验中,将一条不锈钢丝(直径0.1 mm)绷紧并垂直放置于D 型体背部下游1 mm 处的对称面内。在钢丝上均匀涂抹石蜡油,通过电容瞬时放电使钢丝发热,产生跟随流动的烟流。根据来流速度,调节放电时刻与闪光灯照明时刻及拍摄时刻之间的延迟(10 ms)。以Canon EOS 650D 相机(搭配18~55 mm 变焦Canon 镜头)拍摄烟流,相机分辨率为5 184 像素 × 3 456 像素,拍摄区域流向长约4H,横向高约3H。
1.3 控制方法
Coanda 脉冲射流的控制参数包括射流驱动压力pj、射流频率fA、射流占空比RDC和上下侧射流相位差Δϕ,这些参数决定着Coanda 脉冲射流的性能及对D 型体近尾流的控制效果。
本文分别采用开环控制和闭环控制方式对D 型体近尾流进行主动控制。从控制角度来讲,控制对象为D 型体近尾流流动,Coanda 脉冲射流作为执行器对控制对象进行扰动,压力扫描阀作为背压传感器提供不同射流参数下控制对象的响应情况。在开环控制方式下,通过调节执行器(即Coanda 脉冲射流)参数对控制对象(即D 型体近尾流)进行扰动,可以得到控制对象不同的响应(即D 型体时均背压)。与开环控制方式相比,闭环控制方式增加了控制器单元。以背压传感器测得的D 型体时均背压作为反馈信号输入至控制器,经控制器处理后形成控制策略,指挥执行器(即Coanda 脉冲射流)对D 型体近尾流进行扰动。
在本文研究中,遗传算法作为控制器为闭环控制系统提供控制策略。在遗传算法优化过程中,D 型体时均背压作为目标函数,射流参数组合作为种群个体,经过评估、选择、交叉和变异等运算后得到新的种群(即新的射流参数);随着遗传代数增加,种群个体逐步被优化,直到获得最小的目标函数。值得注意的是,遗传算法作为闭环控制器,不能得到解析的控制律表达式。
基于遗传算法的闭环控制流程如图3 所示。首先,在射流控制参数范围内,遗传算法随机产生第一代种群个体—射流控制参数组合(比例阀输入电压,高频电磁阀输入信号的频率、占空比和相位差)。然后,将产生的参数组合依次通过函数发生器生成输入信号传递至电磁阀组。电磁阀组对Coanda脉冲射流进行控制,以改变D 型体近尾流流动结构;同时,测量射流控制下的D 型体背压变化情况。随后,对初始种群参数控制后的D 型体时均背压(即目标函数)进行评估。根据目标函数大小,对射流控制参数组合进行选择、交叉和变异运算,产生下一代射流控制参数组合。最后,判断是否达到终止条件:若未达到终止条件,则将新一代控制参数组合施加于Coanda 脉冲射流,对D 型体近尾流进行控制并计算目标函数,进入下一次优化过程;若达到终止条件,则输出最优目标函数(即最大时均背压值)及最佳控制参数组合。

图3 基于遗传算法的闭环控制流程图Fig.3 Flow chart of the genetic algorithms-based closed-loop control
本文所采用的遗传算法参数如表2 所示。每代种群包含20 个独立个体,选择保留2 个最优个体,交叉率为0.7,变异率为0.3;遗传代数为10 代(即终止条件)。Coanda 脉冲射流控制参数范围为:基于大气压力(pa)的无量纲射流驱动压力p∗j=pj/pa=0~2,无量纲射流频率fA∗=fAH/u∞,c=0~0.35,射流占空比RDC=30%~70%,射流相位差Δϕ=0°~180°。

表2 遗传算法参数设置Table 2 Genetic algorithm parameters
目标函数是D 型体的时均背压,在迭代过程中,遗传算法约需44 000 个旋涡脱落周期的时间对每一代种群中的所有20 个个体进行评估。因此,本文所采用的基于遗传算法的闭环控制不能对D 型体近尾流进行实时控制,即一旦流动情况发生变化(如雷诺数增大或减小),基于遗传算法的闭环控制就不能找到最优控制参数。能够对流动实现实时控制的闭环控制器包括斜率搜寻控制器[9]和线性参数控制[11]等。
2 结果与讨论
2.1 无控制下的流动结果
图4 为未施加控制的D 型体近尾流流动条件下第4、18 号测压孔(测压孔分布如图1 所示。第4 号测压孔位于背部上侧,第18 号测压孔位于背部下侧)的压力系数Cp0随时间t*的变化情况。其中,Cp0=(p - p∞)/,t*=tu∞,c/H;p 为测得的D 型体背压,p∞为实验段入口压力(通过风洞收缩段出口处测压孔测得)。基于所有21 个测压孔压力信号的D 型体时均背压=-0.54,与Pastoor 等[9]的研究结果一致。从图中可以看到:压力信号存在明显的周期,上下侧的压力信号存在180°的相位差。这反映出自然流动状态下D 型体近尾流中存在交替脱落的旋涡结构。图5 中烟流显示的瞬时流动结构也提供了很好的验证。
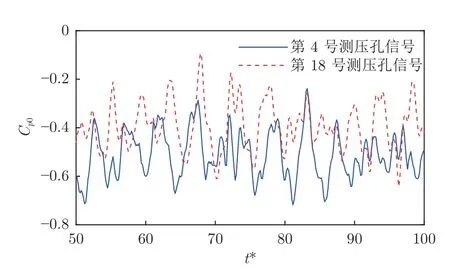
图4 D 型体背部压力系数随时间变化曲线Fig.4 Time-histories of the base pressure coefficients of the uncontrolled D-shaped cylinder flow

图5 自然流动状态下的D 型体近尾流流动结构Fig.5 Smoke-wire flow visualization of the near wake of the uncontrolled D-shaped cylinder flow
基于快速傅里叶变换,对压力信号进行能谱分析。图6(a)~(c)分别为功率谱密度(PSD)函数、互谱(Cross spectrum)、上下侧压力信号相位差Δθ随傅里叶频率f 的变化情况。从图6(a)和(b)可以看到:当无量纲频率f*=f H/u∞,c=0.23 时,功率谱密度函数出现一个明显峰值,对应D 型体近尾流中的旋涡脱落主导频率f0[7];在f*=2f0和3f0处,也可看到明显峰值。从图6(c)可以看到,当f*=0.23时,上下侧压力信号相位差在 ± 180°之间跳动。上述能谱分析结果再次表明:D 型体近尾流中存在反向交替脱落的旋涡结构,与前文的压力随时间变化特征及烟流显示结果一致。
2.2 开环控制下的流动
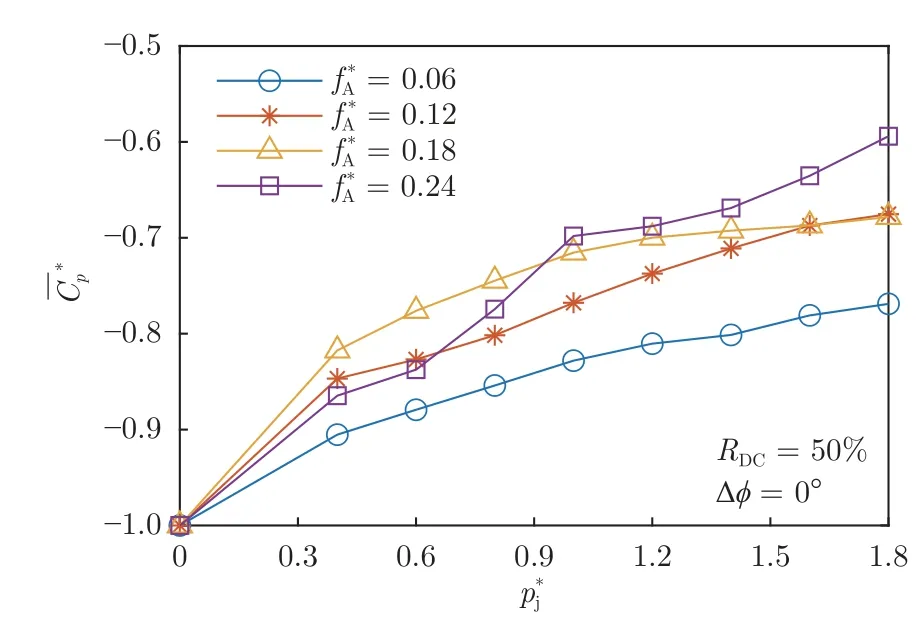
图7 D 型体时均背压随驱动压力的变化Fig.7 Variations of the mean base pressure with the driving pressure
无量纲射流频率fA∗对 无量纲时均背压的影响如图8 所示(p∗j=1.0、Δϕ=0°)。从整体上看,随着fA∗增 大,呈现出“先增大后减小”的趋势。当fA∗增大至0.19、0.29、0.23 和0.16 时,占空比30%、40%、50%和60%对应的增大至最大值,分别为-0.67、-0.58、-0.67 和-0.71。当fA∗=0.29、RDC=40%时,获得了42%的最大背压增量。
射流占空比对时均背压的影响相对复杂,如图9 所示(p∗j=1.0、Δϕ=0°)。当fA∗=0.06 时,随占空比增大而缓慢增大,并在占空比为60%~70%时增至最大值-0.80。随着fA∗增大,占空比对的影响趋势逐渐发生改变:fA∗=0.12 时,随占空比变化不大,在-0.77 附近波动;fA∗=0.18 时,整体上随占空比增大而减小,在占空比30%时,最大值为-0.67;fA∗=0.24 时,随着占空比增大,先增大、后减小,最大值为-0.61(对应占空比35%)。因此,在p∗j=1.0、Δϕ=0°、RDC=35%、fA∗=0.24 的控制参数组合下,获得的最大背压增量为39%。

图9 D 型体时均背压随占空比的变化Fig.9 Variations of the mean base pressure with the duty cycle
图10 为不同fA∗及 对应的最优占空比参数组合下,随Δϕ的变化情况(p∗j=1.0)。从整体上看,随着fA∗增 大,逐渐增大。当fA∗=0.06、RDC=70%时,随Δϕ的变化并不显著,在-0.82 附近波动;当fA∗增 大至0.12、RDC=70%时,随Δϕ先减小、后增大,在Δϕ=0°时提升至最大值(-0.74);当fA∗=0.18、RDC=30%时,整体上随Δϕ单调增大,并在45°~135°范围内增大显著。Δϕ=180°时,增大至-0.63;当fA∗=0.24、RDC=35%时,随Δϕ缓慢增大,在180°时达到最大值(-0.58)。因此,在p∗j=1.0、fA∗=0.24、RDC=35%、Δϕ=180°的控制参数组合下,Coanda 脉冲射流对D 型体近尾流的控制效果最好,获得的最大背压增量为42%。基于上述研究结果可以发现:不同控制参数对背压提高的影响各不相同;在某些参数组合下,Coanda 射流能够使背压大幅增大,射流强度越大,控制效果越好。

图10 D 型体时均背压随相位差的变化Fig.10 Variations of the mean base pressure with the phase lag between the upper and lower jet
2.3 闭环控制下的流动
图11 为闭环控制方式下D 型体背压随遗传代数的进化过程。以不同颜色的圆圈表示每一代种群中不同个体所对应的目标函数值。可以看到:随着遗传代数增加,D 型体背压向增大的方向收敛;进化至第8 代时,其中的个体已取得最优控制效果,对应的时均背压提升达61%。

图11 D 型体时均背压随遗传代数的变化情况Fig.11 Variations of the mean base pressure coefficient with the generation of genetic algorithms
图12 为Coanda 脉冲射流的控制参数随遗传代数的变化情况。从图12(a)可以看到,随着遗传代数增加,p∗j向搜索范围内的最大值收敛,最终收敛于1.94。这与图7 中的趋势相同,即射流驱动压力(反映射流强度)越大,时均背压提升越大。图12(b)为fA∗随 遗传代数的变化情况:在优化过程中,fA∗具 有良好的收敛性;最优射流频率fA∗=0.27,略大于自然旋涡脱落频率0.23。图12(c)为射流占空比随遗传代数的变化情况:占空比向范围下限逐渐收敛,最优占空比为37%。图12(d)为相位差Δϕ随遗传代数的变化情况:在优化过程中,相位差表现出较好的收敛性,最优相位差为136°。以上研究结果表明,基于遗传算法的闭环控制找到了最优控制参数组合(p∗j=1.94,fA∗=0.27,RDC=37%,Δϕ=136°)。与开环实验中观察到的最优控制效果(时均背压提高42%)相比,基于遗传算法的闭环控制帮助Coanda 脉冲射流对D 型体进行了更有效的控制,使时均背压增量进一步提高19%。最大时均背压增量达到了61%。

图12 Coanda 脉冲射流控制参数随遗传代数的变化情况Fig.12 Variations of the control parameters with the generation of genetic algorithms
图13 为最优控制参数(p∗j=1.94,fA∗=0.27,RDC=37%,Δϕ=136°)下D 型体背部第4、18 号测压孔的压力系数Cp随时间的变化曲线。从图中可以看到,压力信号呈现出明显周期性,且上下侧压力信号相位差接近0°。这表明在Coanda 脉冲射流控制的影响下,自然流动状态下D 型体上下侧的反向脱落旋涡趋向于同向脱落。

图13 最优控制参数下的D 型体背部压力系数时程图Fig.13 Time-histories of base pressure coefficients of the optimal controlled D-shaped cylinder flow
对最优控制参数下的压力信号进行能谱分析,如图14 所示。图14(a)~(c)分别为压力信号的功率谱(PSD)和互谱(Cross spectrum)、上下侧压力信号相位差随无量纲频率f*的变化情况。从图14(a)和(b)可以看到,在无量纲频率f*=0.27 处存在峰值,对应Coanda 脉冲射流频率0.27;此外,在2f*和3f*处也存在峰值。图14(c)表明,在射流的控制作用下,上下侧压力信号相位差在0°附近波动。

图14 最优控制参数下的D 型体背部压力功率谱密度函数PSD、互谱Cross spectrum 及相位差Fig.14 Power spectrum density functions of the base pressure,Cross spectrum,and phase lag in the presence of the pulsation jet control
基于D 型体背部中间5 列上下侧测压点的压力信号,对最优控制参数(=1.94,fA∗=0.27,RDC=37%,Δϕ=136°)下的压力信号相位差Δθ进行统计,如图15 所示(横轴z*表示D 型体背部展向无量纲坐标)。在最优控制频谱峰值的邻域内(f*=0.265~0.270),对上下侧压力信号的相位差进行平均,计算其均方根并以误差棒图形式表示于图中。显然,在最优控制参数下,上下侧压力信号相位差由180°减小至0°左右。

图15 最优控制参数下的D 型体上下侧背压信号相位差Fig.15 The phase lag between the upper and lower base pressure in the presence of the pulsation jet control
基于上述结果可以发现,在Coanda 脉冲射流的控制下,D 型体近尾流区域内交替脱落的反向旋涡发生变化,存在同向脱落或对称脱落的趋势。从图16 的D 型体近尾流瞬时流动结构可以看到,自然流动情况下的反向大尺度脱落旋涡消失,进一步验证了图13 中的压力信号测量结果。此外,与自然流动的情况(图5)相比,射流控制下的交替旋涡脱落尺度得到明显抑制,横向摆动幅度大幅减小。

图16 最优控制参数下的D 型体近尾流流动结构Fig.16 Smoke-wire flow visualization of the near wake of the Dshaped cylinder flow in the presence of the pulsation jet control
在无来流情况下,Barros 等[18]的粒子图像测速(PIV)结果表明,在Coanda 脉冲射流出口附近,受Coanda 效应的影响,脉冲射流卷起的一对反向旋涡明显向下偏移,且外侧的逆时针旋涡变得比内侧的顺时针旋涡更强。因此,在最优控制参数下,位于D 型体上下尾缘的Coanda 脉冲射流分别通过这对非对称反向旋涡与上下尾缘分离剪切层相互作用:一方面,非对称反向旋涡会破坏尾缘的分离剪切层发展和卷起过程,抑制大尺度旋涡的形成,特别是在Coanda 射流控制下,D 型体上下侧的旋涡对称脱落(图13~15),使尾流结构趋于稳定;另一方面,Coanda 射流的向下偏移作用也使D 型体近尾流区域变窄,回流区的流向尺度减小(图16)。这两方面的作用,使得D 型体背压回升、阻力减小。
2.4 控制效率
控制效率是主动流动控制技术的一个重要指标[6]。与Jukes 和Choi[19]相同,本文把控制效率定义为分别为有控制和无控制情况下的D 型体时均背压,=pjRDC为有效射流驱动压力。图17 为开环控制下控制效率η随Coanda 射流参数的变化情况。从图17(a)可以看到,当Coanda 射流工作在RDC=50%、Δϕ=0°及不同fA∗的 情况下,控制效率整体随p∗j增大而单调减小;仅当fA∗=0.24 时,控制效率随p∗j增大呈现“先减小、后增大、再减小”的变化趋势。此外,从图17(a)还可以看到,在p∗j=0.4、fA∗=0.18、RDC=50%、Δϕ=0°的控制参数组合下,控制效率达到最高(η=47%)。从图17(b)也可以看到,在p∗j=1.0、Δϕ=0°及不同fA∗下,控制效率随射流占空比的增大而单调减小;仅当fA∗=0.24 时,控制效率随占空比增大而先增大后减小,在RDC=35%时取得最大值57%,对应的控制参数组合为:p∗j=1.0、fA∗=0.24、RDC=35%、Δϕ=0°。
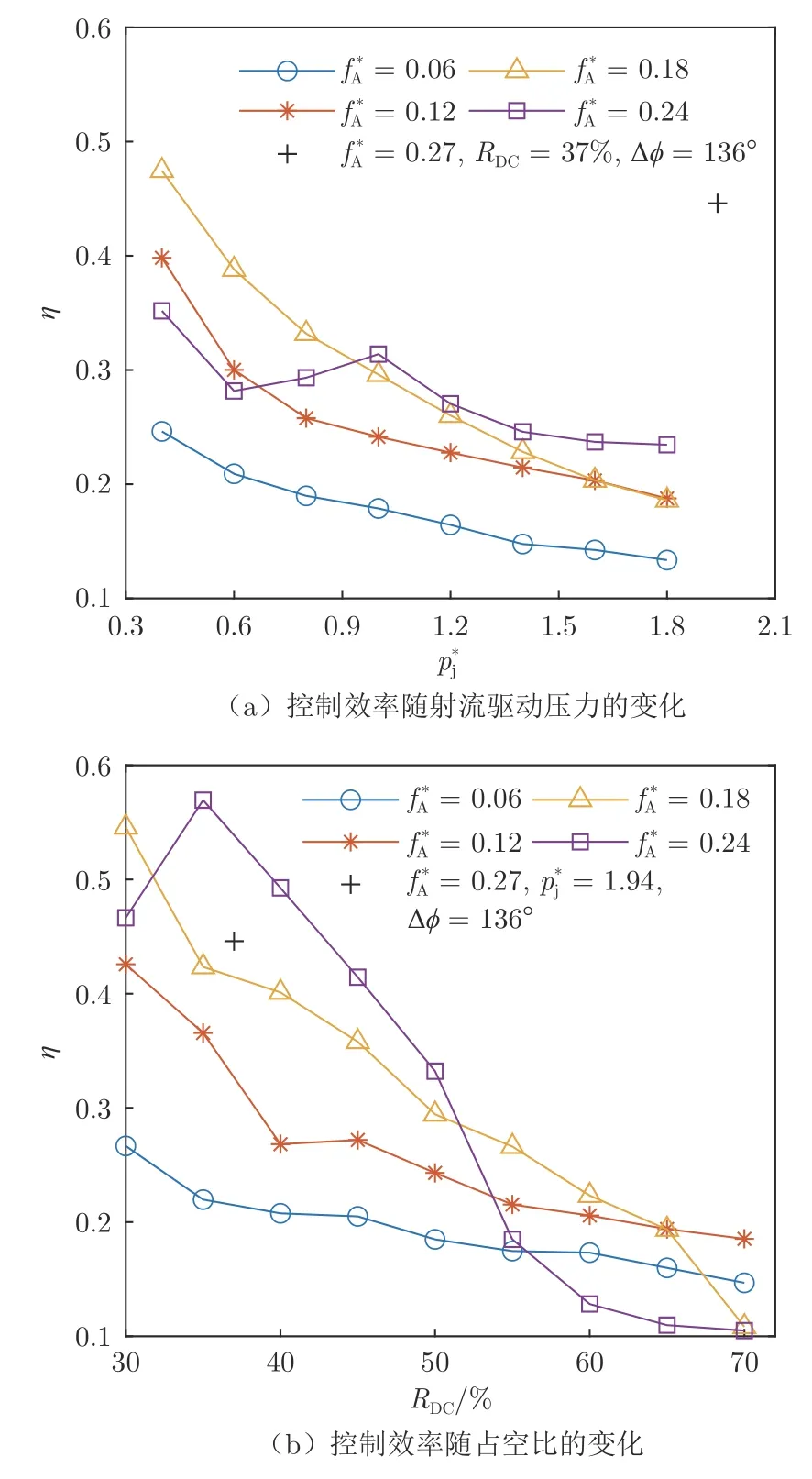
图17 控制效率随射流驱动压力和占空比的变化Fig.17 Variations of the control efficiency with the driving pressure and the duty cycle of jets
图17 还给出了最优控制参数(p∗j=1.94,fA∗=0.27,RDC=37%,Δϕ=136°)下闭环控制对应的控制效率(η=45%,图中以“+”表示)。通过对比可以看出:在闭环控制中,最优控制参数下的控制效率较高;特别是在图17(a)中,在较大的射流驱动压力下,闭环控制的控制效率显著高于开环控制。
3 结 论
结合Coanda 脉冲射流及遗传算法,对D 型体绕流进行了主动减阻控制研究,得到以下结论:
1)Coanda 脉冲射流能够对D 型体近尾流实现有效干扰,提升背压,减小气动阻力。控制效果取决于控制参数组合。在开环控制方式下,给定射流频率、占空比和射流相位差,D 型体时均背压随射流驱动压力增大而单调增大,在本文实验条件下,无量纲射流驱动压力达到1.8 时,无量纲时均背压增幅可达40%。同样,在无量纲射流驱动压力为0.1、占空比为50%、射流相位差为0°的条件下,当无量纲射流频率为0.268 时,无量纲时均背压增幅超过40%。此外,时均背压也依赖于占空比和射流相位差。在具有自主寻优能力的闭环控制方式下,本实验实现了61%的最大时均背压增量,对应的最优控制参数为:无量纲射流驱动压力1.94,无量纲射流频率0.27,占空比37%,射流相位差136°。在闭环控制下,最优控制参数对应的控制效率(45%)显著高于开环控制方式下大部分控制参数组合对应的控制效率。
2)在最佳控制参数组合下,Coanda 脉冲射流大幅改变了D 型体近尾流流动结构。D 型体背部上下侧压力信号能谱结果表明,Coanda 脉冲射流使近尾流中大尺度旋涡脱落频率从自然流动下的0.23 变为0.27,上下侧旋涡相位差从自然流动下的180°减小为0°左右,即最佳控制参数组合使自然流动中反向脱落的大尺度旋涡趋向于同向或对称脱落。同时,烟流显示结果直观展示了D 型体近尾流流动结构从上下交替脱落大尺度旋涡结构转变为横向摆幅减弱、尺度变小的流动结构。
