城市水体表观污染颜色识别技术的优化研究
2023-09-25韦安琦唐毅施骄阳张正峰孙为豪
韦安琦 唐毅 *,2 施骄阳 张正峰 孙为豪
(1.苏州科技大学环境科学与工程学院,江苏苏州 215011)(2.苏州科技大学城市生活污水资源化利用技术国家地方联合工程实验室,江苏苏州 215011)
1 引言
随着城市化进程加快,城市景观水体污染不断加剧,呈现出悬浮物增多、水体颜色发灰发黑、散发刺激性气味等不良表观性状,城市水体景观功能丧失,降低了居民的生活品质[1-2]。
我国已建立一系列针对景观水体的判断标准,但这些标准无法区分景观水体的表观污染程度。申杰[3]使用吸收光谱法表征城市水体表观污染,基本吻合率接近80%。陈鸣等[4]优化了表观污染指数方程及其分级标准,使吻合率提升接近93%。潘杨等[2]对吸收光谱表征城市水体表观污染进行研究,确定可见光区吸收光谱曲线面积能够对水体表观污染进行表征,同时建立了新的表观污染指数方程。李奂等[5]提出表观质量指数法,为评价水体修复成果提供表征方法。魏攀龙等[6]构建了新的水体表观污染指数法(SPI),修正了SPI 公式,使其能够针对水体表观质量作出多层次的评价,科学反映水体表观污染现象的进程。本文基于SPI 建立了城市水体表观污染的线上检测系统,自主开发颜色识别系统,使用数字化表述减少主观判别产生的误差,通过HSB 颜色模式数值(色度、饱和度、亮度)以及浊度,建立了颜色判别模型来实现颜色的分类判别[7]。
城市水体表观污染评价方法可以对水体表观污染程度进行客观评估,定量化表征水体污染程度,该方法已被纳入住房和城乡建设部《城市黑臭水体整治工作指南》。本文基于城市水体表观污染评价方法及线上检测系统中的颜色识别系统,以苏州市城市景观水体为研究对象,对颜色识别系统的吻合率进行验证,并对颜色判别模型及颜色识别程序进行了修改,使颜色的自动化分类判别更加准确。同时使用手机照片进行了颜色判别,验证吻合率,确定使用手机进行颜色识别的可行性,解决使用线上检测系统准确性验证不足、相机不方便携带的问题,更加简便且精确地判断城市河道表观水体的污染程度。
2 材料与方法
2.1 数据获取
景观水体是苏州城市河道的重要组成部分。本课题组以苏州城市水体为例,选取苏州市内市民反映的具有不同表观污染程度与特征的水体,范围涵盖27 处城市景观水体和苏州科技大学石湖校区及江枫校区内的开放、封闭、半封闭河道,共计73 个采样点。在采样点进行拍照以及采集水样,共采集到有效样本数据458 个,其中,绿色水体189 个、黄色水体163 个、灰色水体101 个、黑色水体5 个。
2.2 使用颜色识别程序处理数据
城市水体表观污染线上检测系统中的颜色识别程序,是基于HSB 色彩空间的颜色判别模型实现颜色的分类判别,其中H 值表示色度,S 值表示饱和度,B 值表示亮度,HSB 色彩空间可以反映人的视觉对自然界光线颜色的感觉,与人的视觉感官接近。使用HSB 数值解决了表观污染指数自动化测定的关键技术难题,通过网络环境部署,最终实现表观污染指数的线上检测[7]。
使用颜色识别程序时,需要在现场拍摄带有色卡的水体照片,记录人工识别的颜色,同时进行水样采集。本课题组采用德塔颜色(datacolor)公司Spydercheckr 24 色标准色卡,使用的设备是佳能单反550D(保证2 000 万像素及以上),选择自动白平衡模式,拍摄时选择光圈优先模式,自动对焦色卡区域,镜头距离水面2~3 m,不超过5 m。在拍摄取景时,需要考虑取景范围能够代表水体颜色的特性,需正对水面接近垂直方向拍摄,避免完全垂直拍摄受到倒影的影响,避免波浪、树叶等其他物体的干扰,取景范围必须包含完整清晰的24 色色卡(使用不同的模型需要先在识别系统里建模),还要避免光线太弱或太强(光强不得小于8 000 lx,不得大于20 000 lx)[7]。将拍摄的照片导入颜色识别程序中,程序通过提取照片中色卡中色块的颜色值与色卡颜色的标准值之间的关系,实现色偏修正。得到修正后的水体颜色值后,与测得的采集水样的浊度一起导入颜色判别模型进行水体颜色判别。
人工识别时采用张立的颜色优化模式,即将水体颜色划分为绿色、黄色、黑色和灰色4 个色系[8]。绿色系是指水体表观状况良好,水体呈现清澈、纯绿;黄色系是指水体颜色呈现黄色,包括土黄、黄绿等;黑色系是指水体颜色中带黑色,包括黑、灰黑、黑绿;而灰色系是指除了黑色、绿色、黄色以外的水体[7]。
最后将经过颜色识别程序判别的颜色与人工识别的水体颜色相对比,进行吻合率分析。具体流程见图1。
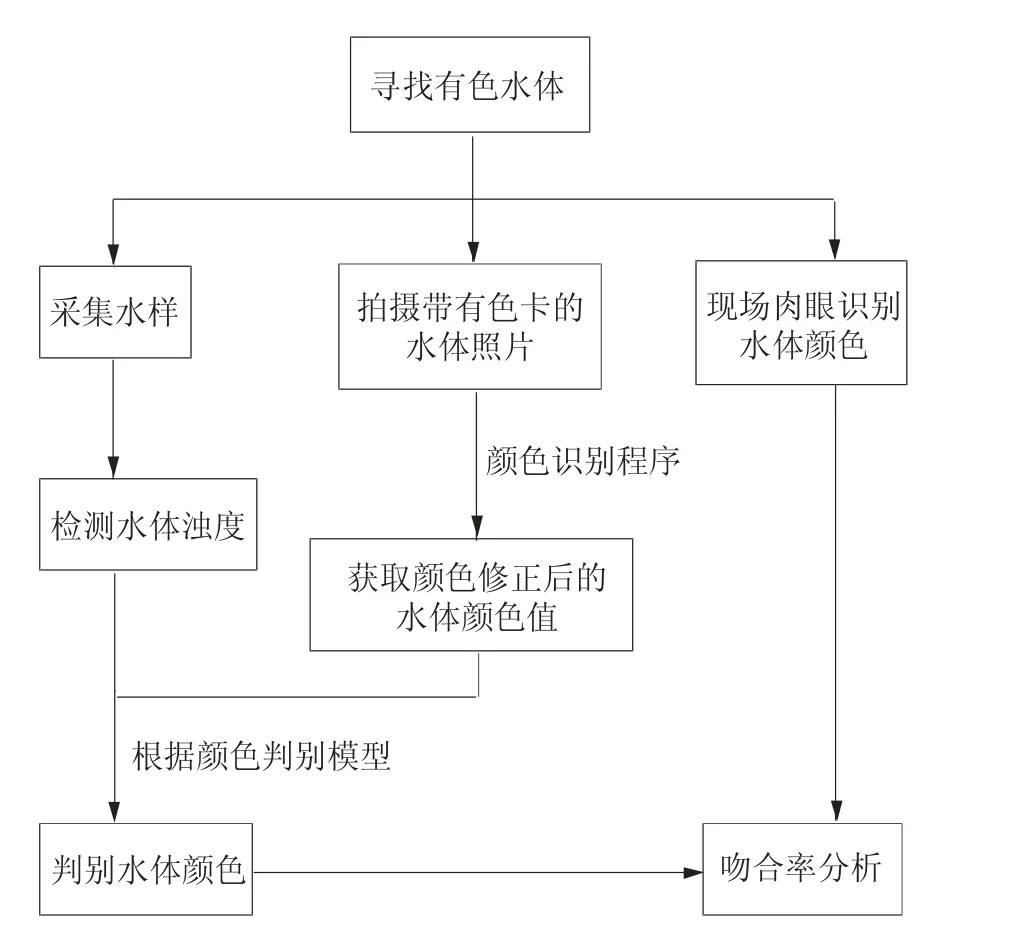
图1 处理数据流程

图2 4 种水体水样的水面B 值
3 分析与讨论
3.1 修改颜色判别模型
取总实验数据的90%做吻合率分析,共计458组数据,其中,黑色水样5 个、黄色水样163 个、绿色水样189 个、灰色水样101 个。通过吻合率可知,颜色判别模型得到的结果与实际主观判别结果基本一致,黑色水体的吻合率为100%,黄色水体的吻合率为97%,绿色水体的吻合率为83%,灰色水体的吻合率为86%,表明颜色判别模型仍有可以完善的地方。
根据对水体颜色HSB 值的梳理分析,绿色水体的误差中有70%是由于绿色水体被判别为黑色,有30%是由于绿色水体被判别为黄色。
黑色水体与其他3 种颜色的水体可以通过水面亮度B 值区分开,通过观察数据图表可知,黑色水体的亮度均小于28(见图1),因此将区分黑色水体的B 值减小到28。
饱和度S 可以区分黄色水体和灰色水体,色度H 值可以区分绿色水体与黄色水体,对绿色水体和黄色水体的H 值观察,结果见图3。

图3 水面H 值与水面S 值的关系
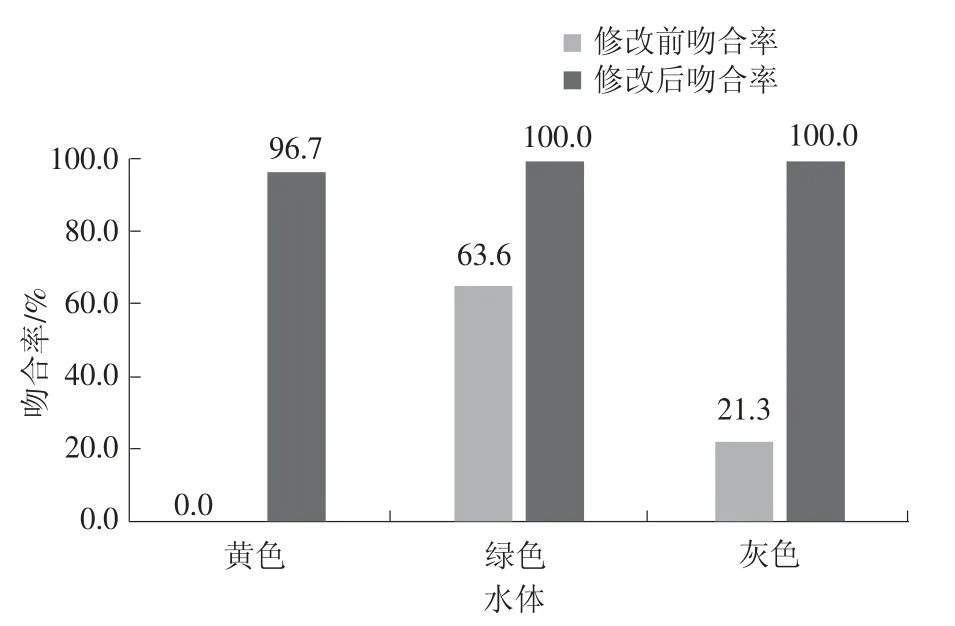
将H 值进行调整,绿色水体75 图4 修改后的颜色判别模型 在进行颜色识别程序应用的过程中发现会产生修正图片偏黄的情况,其为颜色判别吻合率无法达到预期的可能原因之一,于是对颜色识别程序进行检验。 对比框选水体照片大小所得数据后,发现数据变化不大,随后进行修正颜色前后色卡参数值的提取比照,检查软件参数等检验操作后,最终确定颜色识别软件所采用的标准参数造成了颜色识别出现较大误差。原颜色识别软件的标准参数为色卡的sRGB标准参数。sRGB 是一个通用的标准色域,它可以使各种计算机外部设备与应用软件在色彩方面语言互通[9]。但同为表示颜色范围的色域标准,Adobe RGB的色域覆盖范围比sRGB 更广,与sRGB 相比,Adobe RGB 多占据CIE 色域标准约20%,提高了青绿色系上的显示,能够记录更多的颜色细节,也拥有更高的影像信息保存度。因此,本课题组将软件参数值调整为Adobe RGB 标准参数值,以提升绿色水体的吻合度。Adobe RGB 标准参数见图5。 图5 Adobe RGB 标准参数 经过颜色判别模型的修改,区分黄色水体与绿色水体, 从数据中选取10%用于验证分析,共计45个水样,其中,黄色水样19 个、绿色水样16 个、灰色水样10 个。通过验证结果可知,颜色判别模型修改后的总体吻合率得到提升,黄色水体的吻合率降低了2%,绿色水体的吻合率从83%上升到94%,灰色水体的吻合率从86%上升为100%。 3.4.1 应用于手机照片的颜色识别 鉴于手机的便携性,本课题组在肉眼识别河道水体表观颜色以及相机拍摄水体照片的同时,按要求使用手机对河道水体进行拍摄。手机型号为华为CDY-AN20,在拍摄前将照片的存储格式设置为RAW,确保原片不会因修图或压缩导致受损。将手机拍摄的照片通过修改后的颜色软件进行颜色识别,并结合浊度,依照颜色判别模型进行颜色判别。 使用优化后的颜色识别技术进行数据分析,共计91 组数据,其中,灰色水体10 个、黄色水体30个,绿色水体51 个。进行数据分析后,得到各颜色水体吻合率为:灰色水体吻合率达到100%,黄色水体吻合率达到96.7%,绿色水体吻合率达到100%(见图6)。识别吻合率高,可见手机照片可以应用于城市水体颜色识别。 图6 手机颜色识别技术优化前后吻合率对比 3.4.2 应用于城市水体线上检测 优化后的颜色识别系统通过自动识别照片中的标准色卡,对照片进行色差的修正,再对水体的颜色进行识别,得到较为准确的水体颜色HSB 值,过程方便快捷,导入照片即可快速得到结果,然后将系统给出的HSB 值与城市水体的浊度值一并导入到优化后的颜色判别模型当中,可以更加精准快速地对城市景观水体的颜色进行定性判别和描述。 同时采用紫外—可见分光光度计扫描原水水样及经过0.22 μm 滤膜抽滤后的水样,得到滤前滤后扫描文件,导入城市水体表观污染线上检测系统,生成SPI 值(见图7)。根据SPI 值的不同,将表观污染状况分为5 个等级:SPI<10 表示水体表观质量好,10≤SPI<25 表示较好,25≤SPI<45 表示尚可,45≤SPI<70 表示较差,SPI>70 表示差[8]。通过SPI 值进行城市水体表观污染程度的判别。 图7 城市景观水体线上检测系统流程[8] 研究结果表明,使用相机拍摄照片时,将颜色判别模型中区分黑色水体的B 值减小到28,区分绿色水体调整为75 使用手机拍摄照片时,使用优化后的颜色判别模型及参数,灰色水体吻合率达到100%,黄色水体吻合率达到96.7%,绿色水体吻合率达到100%,确定使用手机照片进行城市水体颜色判别的可行性,使得城市水体表观污染评价方法更加便捷,可为城市水体表观污染线上检测系统的进一步推广提供坚实基础,提高城市水环境管理的效率,实现对城市水环境的智能化管理和信息化建设。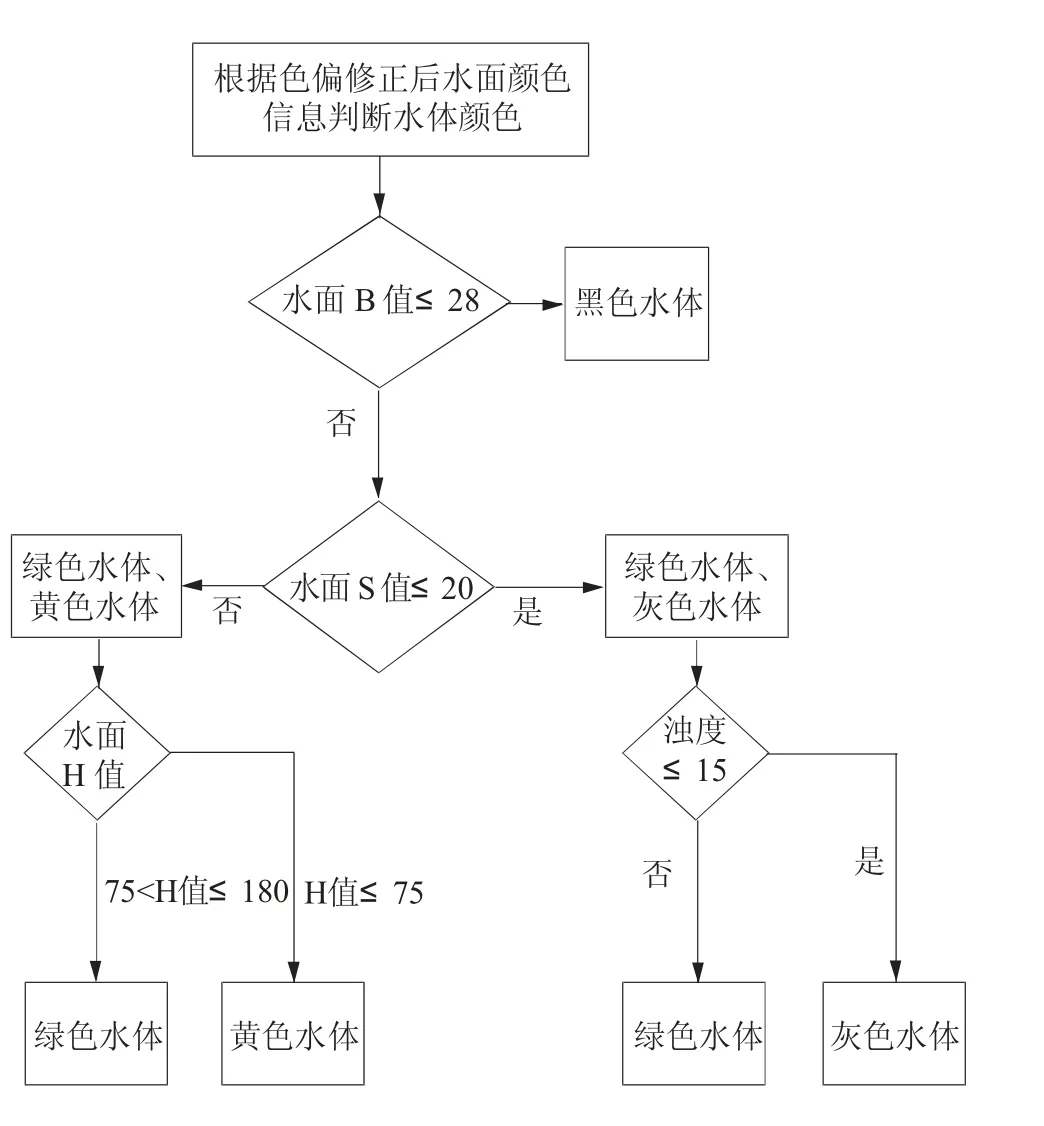
3.2 颜色识别程序参数的调整

3.3 颜色识别优化验证
3.4 优化后颜色识别技术的应用

4 结语
