基于UWB定位的智能温室三维温湿度检测系统研究
2023-09-23刘艳伟李思雯杨启良何家俊
刘艳伟 李思雯 杨启良 何家俊
(1.昆明理工大学现代农业工程学院,昆明 650500; 2.昆明理工大学季节性旱区水-土-作物系统云南省野外科学观测研究站,昆明 650500;3.云南省高校特色作物高效用水与绿色生产重点实验室,昆明 650500; 4.惠州市赢合科技有限公司,惠州 516008)
0 引言
传统温室温湿度有线检测系统在实际应用中布线复杂、可靠性低,并且不方便管理。与之相比,无线传感器技术解决了温室环境参数采集和通信上的问题,使温室检测系统逐渐成为以信息网络为基础的精准农业模式,从而加快温室环境检测系统的网络化、数字化和智能化进程。
近些年随着对温室环境监测精准性要求的不断提高,部分学者提出在温室内布置多点传感器以全面监测温室环境数据变化特征。RODRIGUEZ等[1]设计了一种基于无线传感器网络的玫瑰温室精准农业数据监测与预测系统,该系统通过ZigBee无线通信网络将传感器节点采集的温湿度等环境参数上传到数据库,再根据神经网络算法预测此环境下玫瑰的生长状况,并在远程客户端进行显示。邓小蕾等[2]设计了一种能够监测土壤水分移动的自动化系统,该系统以ZigBee技术实现无线通信,并在温室内多个位置布置土壤水分监测节点,然后通过GPS对监测节点进行定位,最后使用Surfer 8软件绘制土壤水分等高线分布图,以了解温室土壤水分迁移变化规律。车艳双等[3]设计了基于GPS以及PDA的智能农田采集系统,该系统以ZigBee网络组成信息节点,对温室温湿度等环境参数进行测量并实现无线传输,并通过GPS差分信息定位方式对传感器节点进行定位,提高了节点定位的精度。
以上温室环境多节点检测系统有效显示了温室内环境数据变化趋势,提升了环境数据的可靠性和精准性。但此类温室检测系统的检测节点主要是分布在二维平面中,而温室内的温湿度在空间范围内流动变化快,并且受温室内设备(排风扇、遮阳布等)以及植物冠层等影响在垂直方向出现分层分布状态,平面内温湿度数据无法准确有效反映温室内温湿度变化特征。为进一步推动温室内温湿度变化规律的研究,对常见的定位技术及特点进行了广泛研究。目前常见的定位技术主要包括GPS定位技术、蓝牙定位技术、Wi-Fi定位技术、UWB(Ultra wide band)定位技术、超声波定位技术、射频识别(RFID)技术、红外线定位技术、ZigBee定位技术等[4]。实际应用中温室多节点检测系统需要对各传感器节点进行定位,温室内密闭环境的多径效应,以及植物密布的复杂环境和灯光、冷雾等设备都会对信号的传输产生影响,传统定位方式已无法满足传感器节点日益提升的高精度定位需要。UWB采用极窄脉冲实现无线通信,与其他无线通信方式的定位原理相比有着较大不同。极窄脉冲时间分辨率较高,能精准分辨多径反射信号。UWB 定位方法穿透能力好、抗多径效应强,具备很高的安全性和低功耗特点,可进行一维、二维和三维高精度定位,并且还可实现室内移动物体的定位[5]。
基于上述温室温湿度检测技术发展现状,以及在检测过程中出现的节点定位精度低、三维温湿度检测手段缺乏等问题,本文设计一种基于UWB定位的温室三维温湿度检测系统。该系统实现包括检测温室内三维温湿度的下位机、传感器节点空间定位的方案、远程数据监测与管理的PC端监测软件和温室三维温湿度数据可视化的HTML5技术方案。结合UWB室内定位技术、传感器技术、4G网络通信技术、C#编程和Web前端开发等技术,实现温室三维温湿度的智能检测以及三维空间温湿度可视化。
1 系统总体设计
智能温室三维温湿度检测系统由下位机检测端、上位机监测端2部分组成。下位机检测部分主要实现温室内环境参数的测量以及传输,主要包括各传感器检测节点、UWB定位系统以及4G通信模块,其中UWB标签与多个传感器绑定共同构成传感器节点,根据温室高度确定每个标签对应温湿度传感器数量,本文研究以每个标签对应3个传感器,每个传感器之间间隔1 m为例。在UWB定位系统中含有4个基站,可实现各标签位置的高精度三维定位,UWB主基站接收到各UWB标签和基站传输的位置信息以及传感器数据后,使用4G通信网络与远程终端实现数据交互。
上位机监测部分主要是实现环境数据的远程显示,上位机读取4G通信模块传输的环境参数以及位置信息后,将其储存在相应数据库中,登录PC端软件即可实现数据的查看和管理等,并在Web端实现温湿度数据的三维可视化显示。系统总体结构如图1所示。
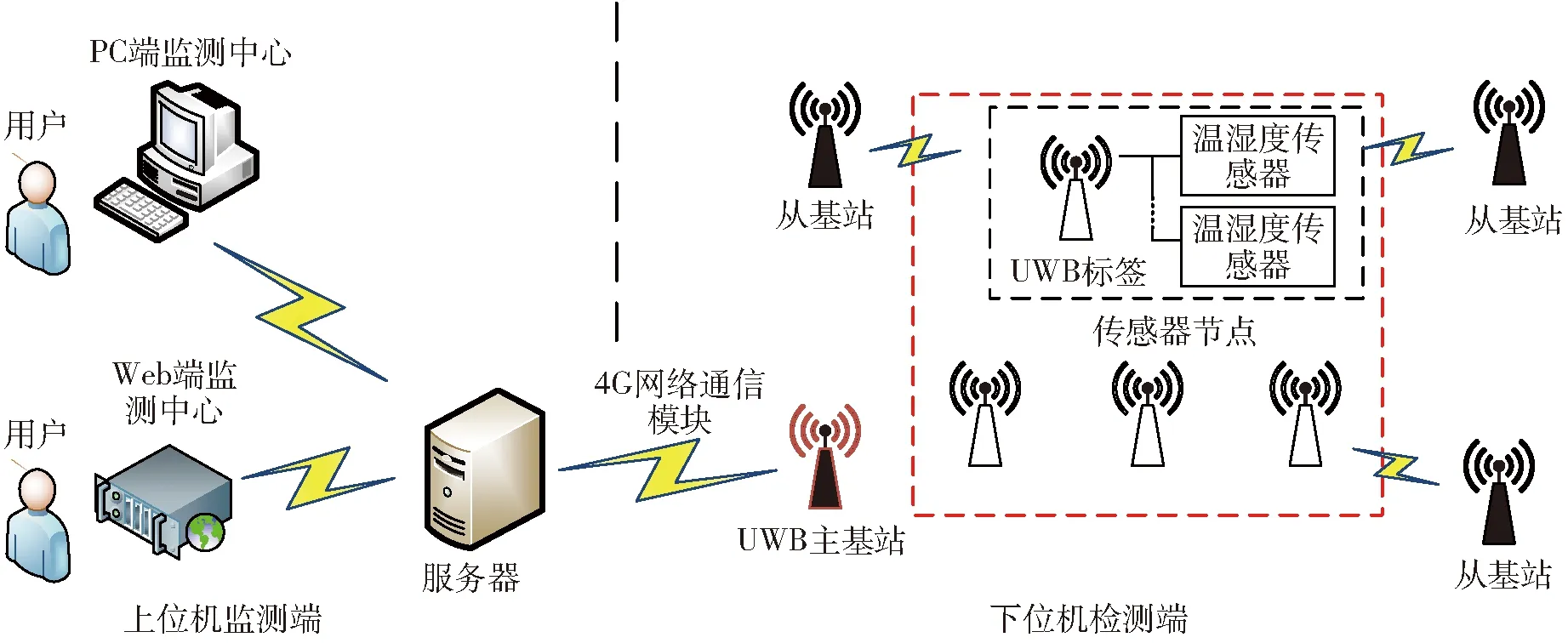
图1 系统结构图
2 系统硬件设计
温室三维温湿度立体检测系统硬件部分主要包括各传感器检测节点、UWB定位系统以及4G通信模块,以主基站为坐标原点建立坐标系,在系统初始工作时,传感器检测节点及其顶端装有的UWB定位系统标签同时进入工作状态,UWB定位系统通过对标签的空间三维位置测量,进而得出传感器节点上各传感器的三维位置。传感器节点上各传感器将温室环境数据采集完成后,将数据发送到UWB标签,同时UWB基站收集各标签信号时间戳,最后将定位数据以及传感器信息数据统一汇总到UWB主基站。UWB主基站对数据进行统一处理后,通过4G无线通信模块将传感器数据以及对应空间位置传输到PC端,进而对数据进一步处理、储存以及显示。硬件结构如图2所示。
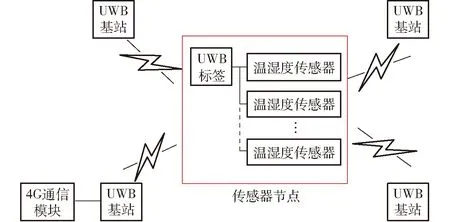
图2 硬件结构框图
2.1 传感器节点硬件设计
传感器节点硬件设计主要分为5部分:MCU、锂电池电源、LED显示模块、高精度温湿度传感器以及UWB信号发射模块(UWB 标签)。传感器节点硬件设计框图如图3所示。
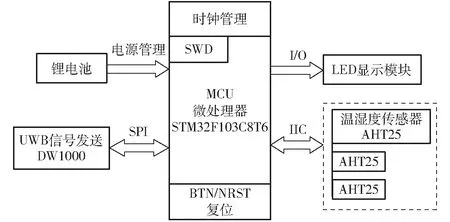
图3 传感器节点硬件设计框图
MCU微处理器选择STMicroelectronics公司生产的STM32F103C8T6型32位标准RISC微控制器,该处理器拥有Cortex-M3高性能内核,采用LQFP48协议封装。STM32F103C8T6的工作频率高达72 MHz,内部含有20 K×8 bit的 SRAM和128 K×8 bit 的Flash存储器,能够发挥出ARM内核的性能[6],同时拥有12个DMA通道,每个DMA通道均可独立管理外部设备到储存器之间数据的双向传输、存储器之间的数据双向传输,可有效提升数据传输速度,节省大量CPU资源[7]。
传感器节点终端设备上装有垂直分布的3个高精度温湿度传感器,实现各传感器Z轴定位,选用奥松电子生产的AHT25型传感器,该传感器测量范围较大,并且具备标准间距的插销方式连接器。同时AHT25型传感器表面覆盖有一层IP67高透过滤膜,可防止外界沙尘和雨水进入传感器内部,同时配置有AF02过滤帽,能有效减小灰尘对过滤膜孔隙的堵塞,防止湿度测量精度降低,因此AHT25型传感器在恶劣环境下运行时,依然能够具备较高的稳定性和精准性。AHT25型传感器采用IIC协议,IIC总线即SDA、SCL集成电路总线,是飞利浦公司发明的一种双向、二线制性质的同步串行总线[8]。IIC采用同步通信,即根据时钟信号,每次发送数据量仅为一帧,发送的信息位数不受限制,通信效率高,要求在传输过程中保持精确的同步时钟;通信传输方式为半双工通信,即在同一工作时刻,只能从发送数据或接收数据2种状态中选择一种数据传输方式。在传感器节点中,MCU与2~4个AHT25型传感器相连接,因此AHT25型传感器的IIC连接中,采用一主多从的通信方式,即一个主设备(MCU),多个从设备(AHT25型传感器)。传感器节点实物图如图4所示。
2.2 UWB基站硬件设计
UWB基站分为普通定位基站以及主基站,普通基站的功能主要是接收UWB标签信号时间戳,主基站在接收信号时间戳的同时对传感器节点数据进行接收和储存,并将数据分析处理后,通过4G网络通信模块将传感器数据及位置信息发送到上位机。与UWB标签相比,UWB主基站微处理器也是STM32F103C8T6,但添加了数据存储模块、4G网络通信模块,减少了温湿度传感器模块。UWB主基站硬件结构示意图如图5所示。UWB主基站实物图如图6所示。
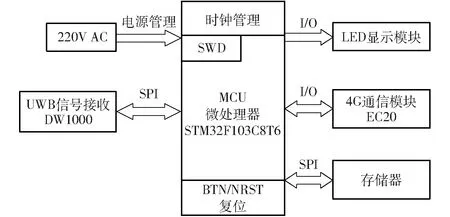
图5 UWB主基站硬件结构示意图
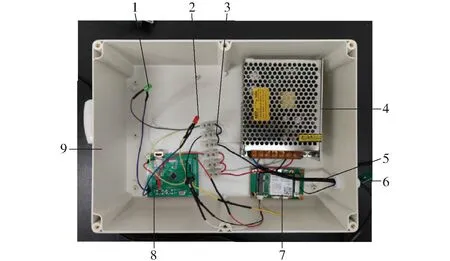
图6 UWB 主基站实物图
在温室内,由于空间密闭,多径效应严重,同时受到温室内照明、喷灌等设备的影响,UWB信号传播介质容易改变,且存在一定的非视距影响。UWB定位系统通过TDOA定位方法测量UWB信号从标签到2个基站之间传播时间的差值,得到标签到2个基站之间的固定距离差,利用多个基站接收到信号的时间差来确定移动目标的位置。根据待测标签的脉冲信号到各基站的时间差来拟合双曲线[9-10],待测标签广播一次数据,只需基站之间保持时钟同步即可。再利用Chan算法对TDOA定位结果进行分析得出标签位置,实现监控环境参数[11]。
UWB定位系统采用深圳安信可科技有限公司生产的BU01模块,信号收发器采用荷兰DECAWAVE公司生产的DW1000芯片,DW1000芯片属于低功耗射频收发器,内部集成全部基本电路,其遵循IEEE802.15.4-2011 UWB标准。UWB定位的精度处于厘米级别,采用极窄脉冲通信技术,因此具有极高的时间分辨率,可有效减小定位误差。BU01模块使用3.5~6.5 GHz之间的4个信道,支持多种数据传输速率(100 kb/s、850 kb/s 以及6.8 Mb/s),能有效处理多径效应,能够实现高反射密闭区域内的定位计算。其内部功能如图7所示。
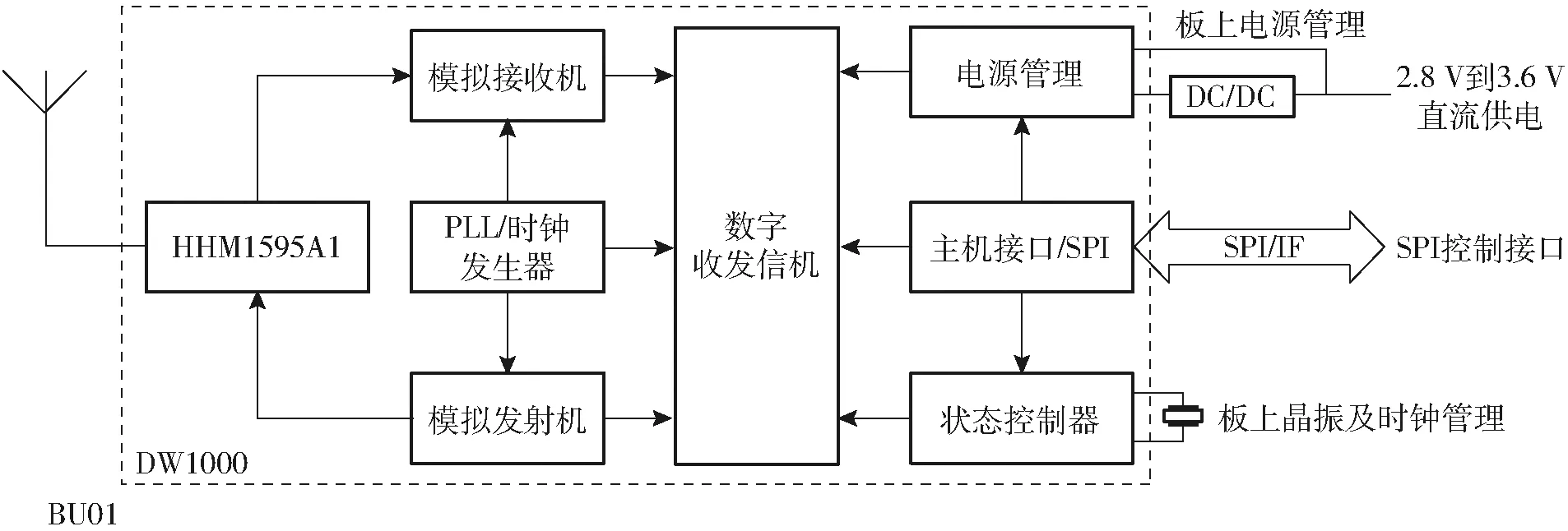
图7 BU01内部概览图
2.3 4G通信模块
UWB主基站通过4G模块将传感器数据以及位置信息发送到上位机,在系统中采用的4G网络模块是EC20 R2.1 Mini PCIe-C模块。采用Mini PCIe接口(PCI Express Mini Card 1.2 标准),电压范围为3.0~3.6 V,支持射频带宽范围为1.4~20 MHz,上下行根据频道选择具有不同的最大速率,LTE-FDD:150 Mb/s(上行)~50 Mb/s(下行),LTE-TDD:130~35 Mb/s。EC20支持下行MIMO操作,可增加天线数量,保证通信质量。同时兼容GSM/GPRS网络,当3G/4G网络缺乏时可正常工作。
3 系统软件设计
3.1 UWB标签程序设计
UWB标签及传感器节点嵌入式程序开发选用Keil Software公司设计的Keil u Vision5软件,Keil支持STM32全系列单片机的C语言开发,其使用简单、操作简捷。Keil具备包括IDE(uVision5)、库管理、μVision 调试器、C编译器、宏汇编、安装包以及链接器等在内的C语言完整开发方案[12]。UWB标签及传感器节点的程序设计流程如图8所示。
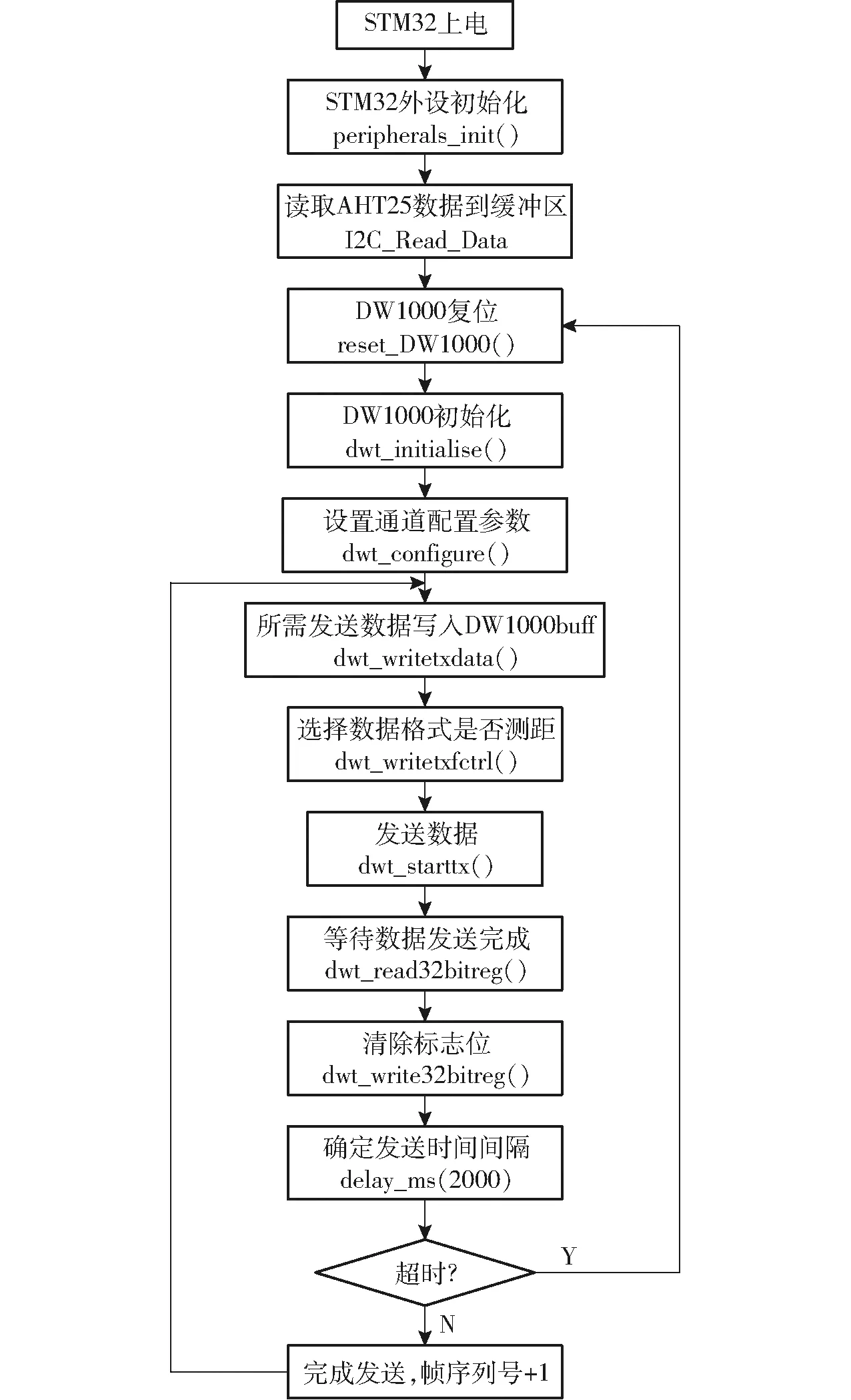
图8 UWB标签程序设计流程图
UWB基站的软件主要实现接收UWB标签信息,并将信息打包通过4G模块发送到主站的功能。UWB基站程序设计流程如图9所示。
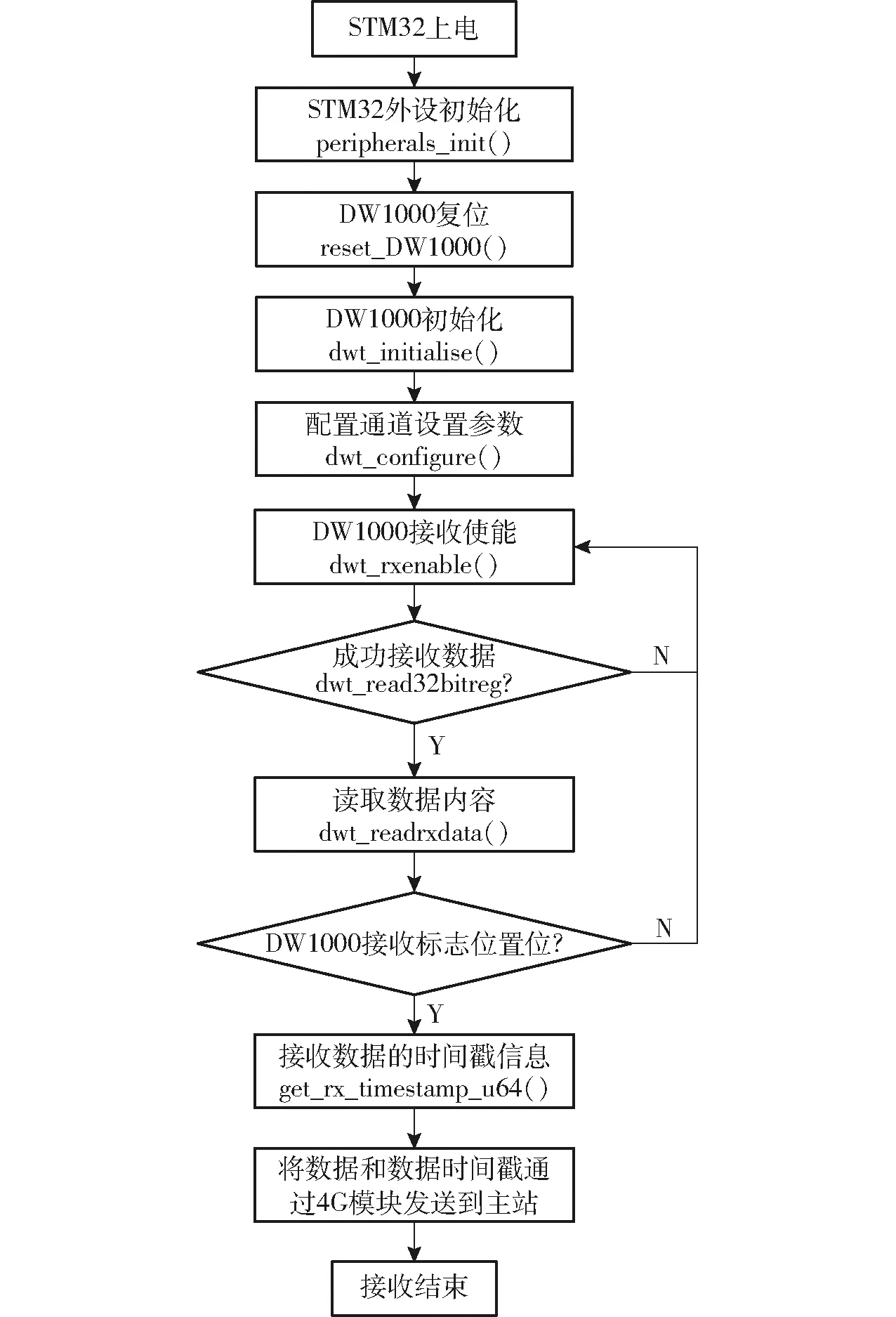
图9 UWB基站程序设计流程图
3.2 PC远程端监测中心总体设计
本系统软件采用C#语言和Microsoft Visual Studio 2012开发平台为基础进行开发设计。
3.2.1远程端监测中心
远程端监测中心(上位机软件)主要是将温室内温湿度数据在PC端进行显示,包括各传感器节点处实时温湿度数据,以及历史温湿度数据曲线等。当温室内温湿度数据在设定值范围之外时,远程端监控中心发出警告,提醒管理员进行处理,远程端监测中心功能规划图如图10所示。
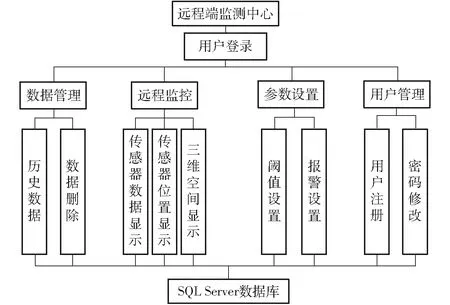
图10 远程端监测中心功能规划框图
3.2.2监测平台界面设计
监测平台界面设计包括MySQL数据库设计、登录模块、主界面、用户管理界面、数据管理模块、远程监控模块6部分。
(1)MySQL数据库设计
远程端监测中心在运行过程中会产生大量数据,这些数据对于温室的建造和植物的生长管理及研究有重大意义,将这些数据存放在数据库中,可方便随时查看调用。SQL Server数据库属于一种关系数据库智能管理系统(RDBMS),是目前全球使用最广泛的数据库之一,其使用便捷、功能强大、响应速度快,在SQL Server中具备一系列分析报告工具,为数据库的建立和数据的备份、拷贝等提供强力保障[13-14]。
根据远程端监测中心的功能,将需要储存的数据分为3大类,分别为:温室环境参数数据库、用户信息数据库以及植物生长参数数据库。
(2)数据管理模块
在数据管理界面,主要分为温室大棚选择区、数据显示区以及功能区。
(3)远程监控模块
在软件的远程监控模块中,主要含有3种功能:实时监测、历史曲线以及异常数据显示功能。
4 试验结果与分析
4.1 系统测试
4.1.1试验场地准备
试验在昆明理工大学智慧农业教学科研基地进行,基地温室为拱圆形双层塑料大棚,长21 m、宽6 m。首先在温室内部署一套完整的下位机检测平台,包括220 V交流电铺设以及悬挂架搭设等辅助准备。UWB定位系统选择3个定位基站1个主基站,数据采集部分共布置8个传感器节点(网格式分布,间距1.5 m×1.5 m),其中每个传感器节点上含有3个AHT25型温湿度传感器,单个传感器节点上AHT25型传感器间距为1 m。采集终端部署情况如图11所示。主基站及传感器分布示意图如图12所示(以主基站为坐标原点建立坐标系,X、Y、Z分别表示在温室中的实际长、宽、高。1-1~8-3表示传感器)。
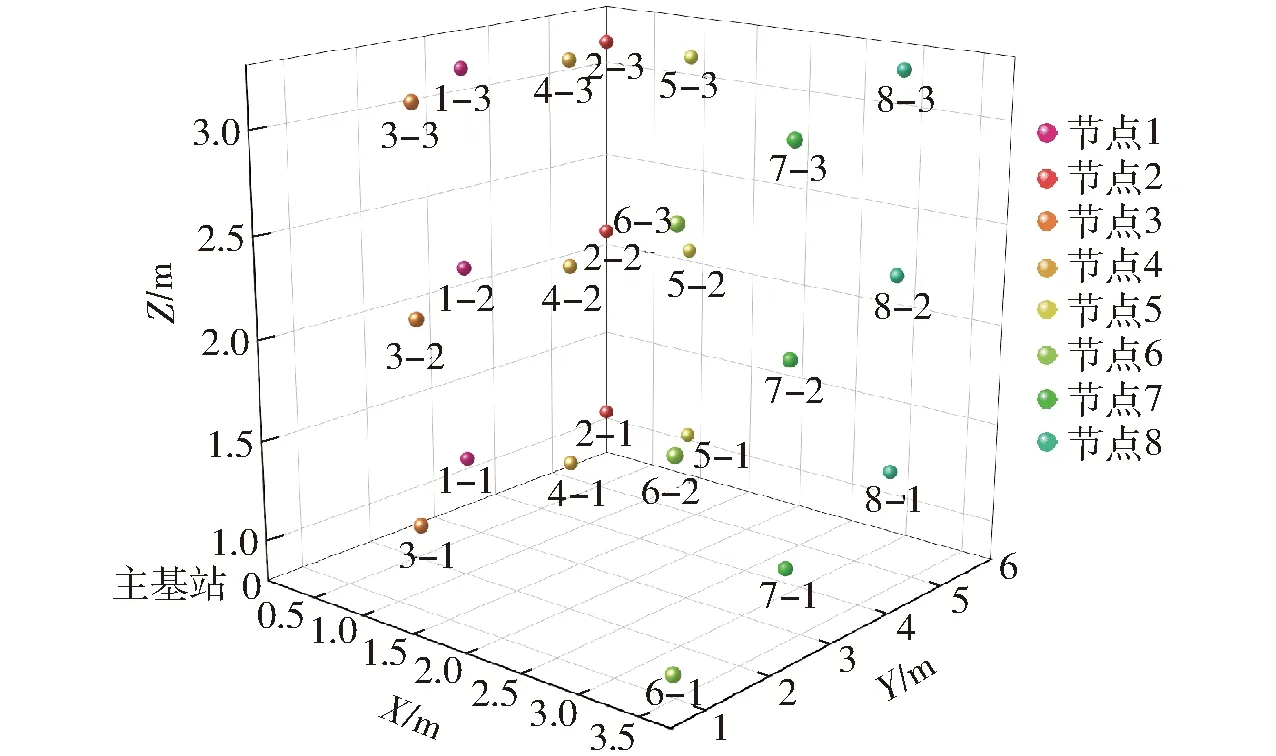
图12 主基站及传感器分布示意图
4.1.2数据传输显示功能测试
下位机通过4G网络通信模块将数据发送到Web端和远程端监测中心,在对系统数据传输功能检测前,可先通过4G网络调试助手观察UWB主基站与4G网络通信模块的连接情况以及传感器数据的发送情况。节点信息用节点-传感器编号、温度、相对湿度、X、Y、Z、日期、时间表达,以节点3为例。服务端接收数据界面如图13所示。
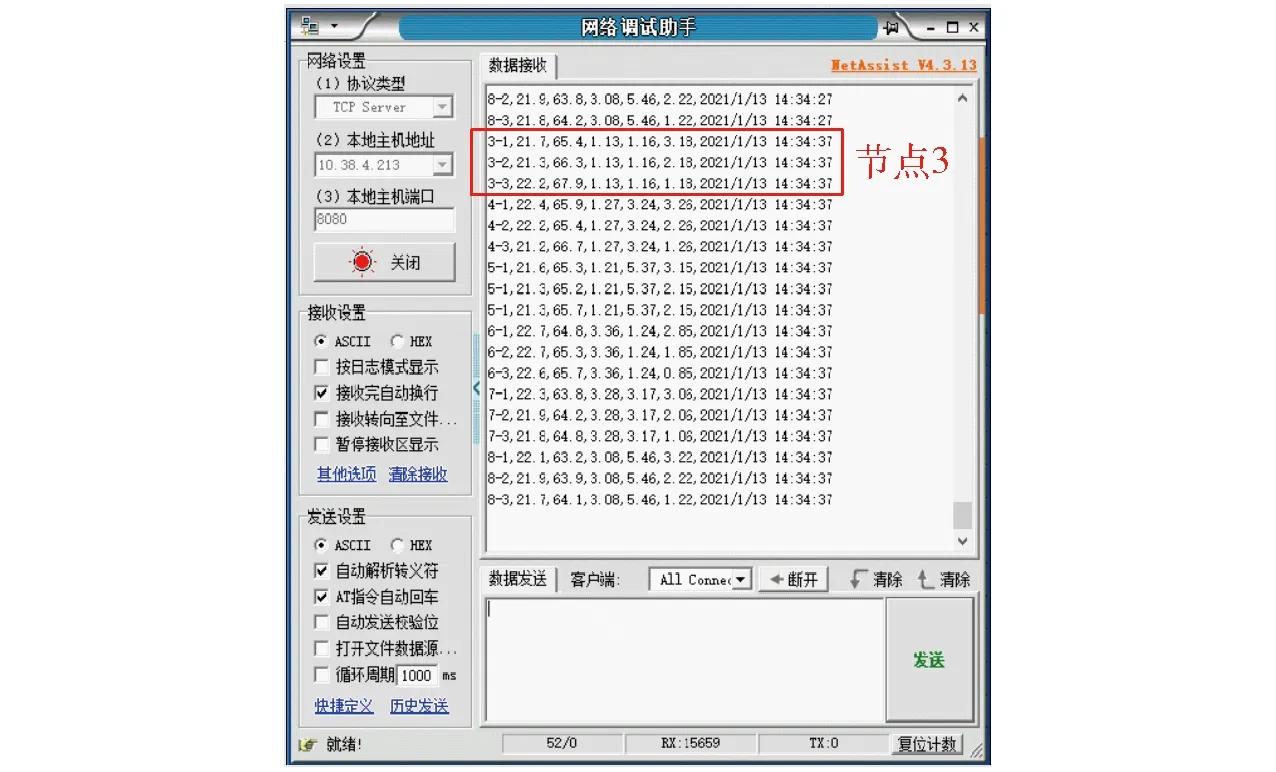
图13 4G 网络调试助手调试界面
通过测试可以看出服务器端准确接收4G网络通信模块发送的数据帧,其格式准确。表明系统下位机的4G网络通信模块稳定、可靠,能够实现系统的远程无线传输功能。
4.1.3软件监测功能测试
打开远程端监测中心软件,在登录界面登录管理员账号,分别测试远程监测以及数据管理功能。
(1)远程监测功能
实时监测界面测试结果如图14所示,警报界面如图15所示,异常数据界面测试结果如图16所示,历史曲线界面测试结果如图17所示。

图14 实时监测界面测试结果
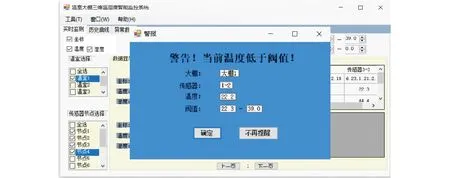
图15 警报界面
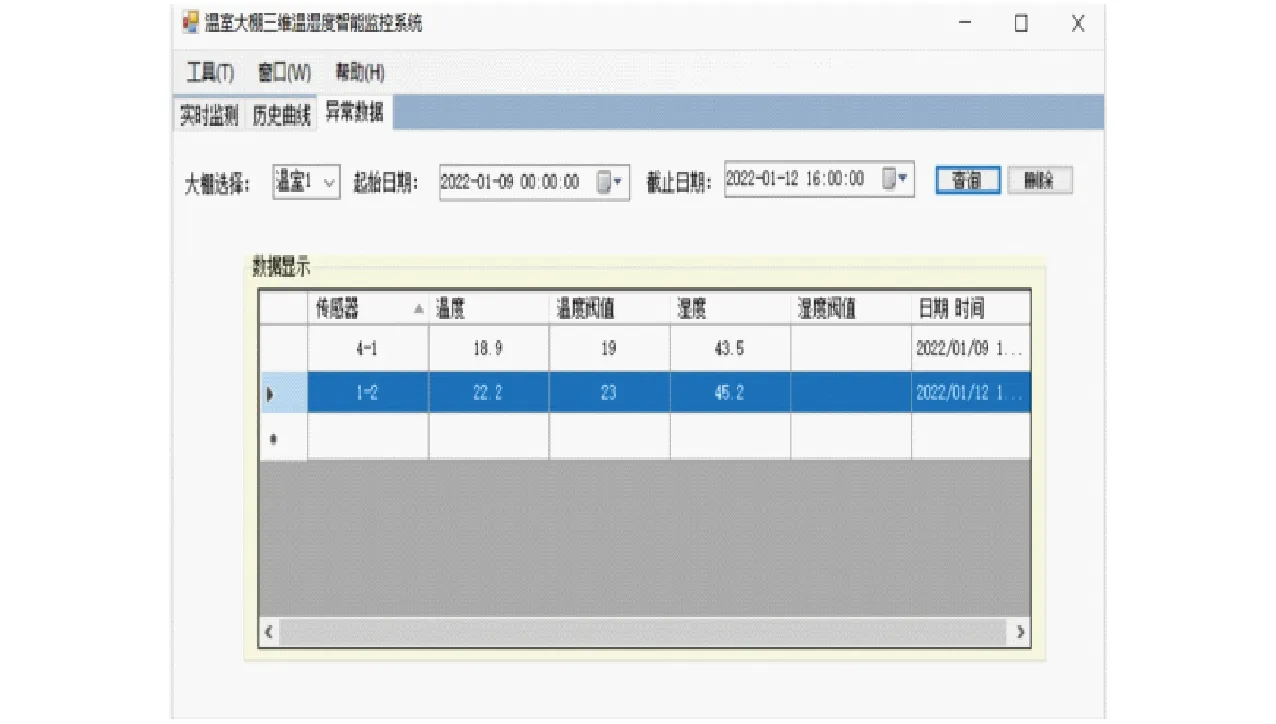
图16 异常数据界面测试结果
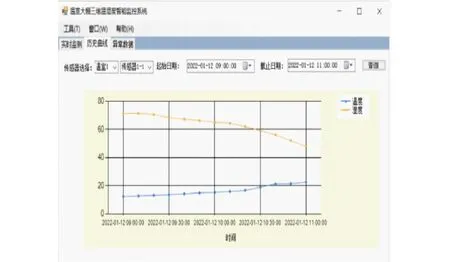
图17 历史曲线界面测试结果
(2)数据管理功能
在数据显示区可以看到温室大棚环境参数数据库中的信息已经通过 DataGridView控件进行显示,表格列标题及表格数据均准确无误,说明通过该数据管理窗口可以实现历史数据查询功能。数据管理界面测试结果如图18所示。
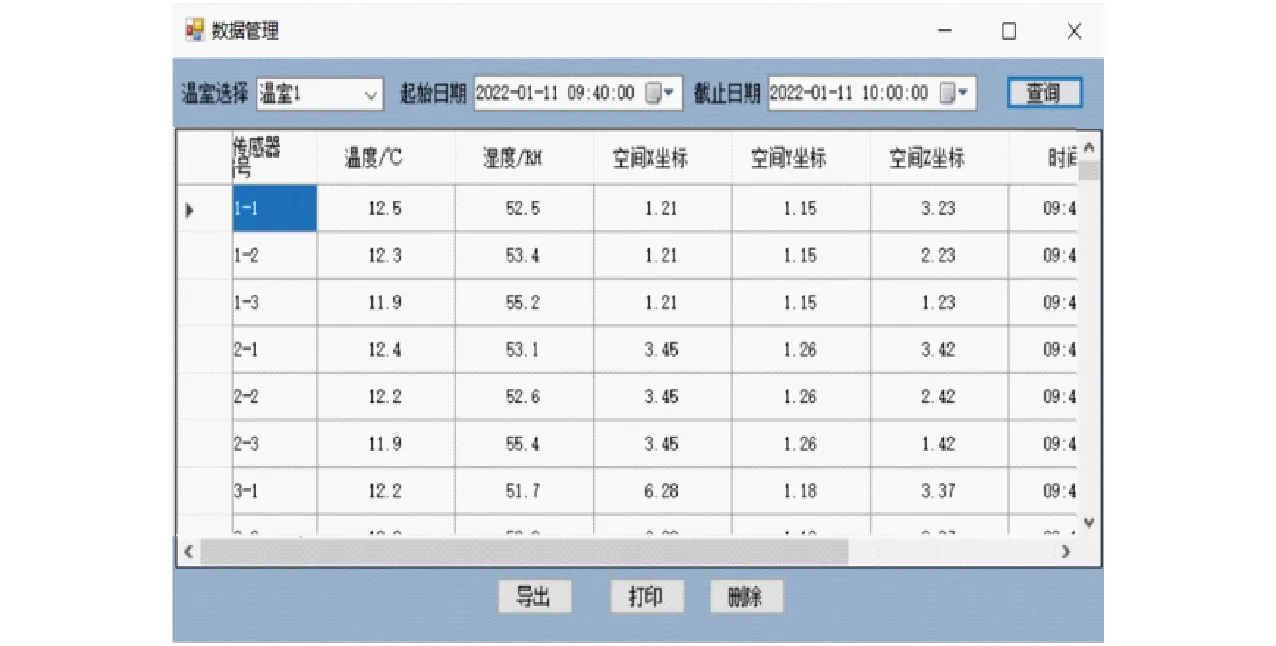
图18 数据管理界面测试结果
通过对该软件的登录、远程监测、数据管理等功能的测试,可以查询实时监测数据、显示历史曲线及异常数据等。表明该系统远程端监控中心很好地实现了数据的显示和存储等功能,满足系统上位机软件的常规需求。
4.2 系统定位精准性测试
系统定位精准性测试于2022年1月13日14:00—17:00期间在昆明理工大学智慧农业教学科研基地进行,试验期间关闭喷雾、通风等设备,温室内平均温度为14.5℃,平均相对湿度为54.3%。使用米尺、尼龙线等测量各节点位置,以3次测量数据的平均值为节点实际位置,各节点以频率5 s/次,发射1 000次真实数据,以PC端监测软件接收各节点测量数据,通过Matlab的norm函数对节点测量位置与实际位置之间的距离进行计算,将定位误差分为[0 cm,10 cm]、(10 cm,30 cm]、(30 cm,50 cm]3个区间,各节点定位精度如表1所示。
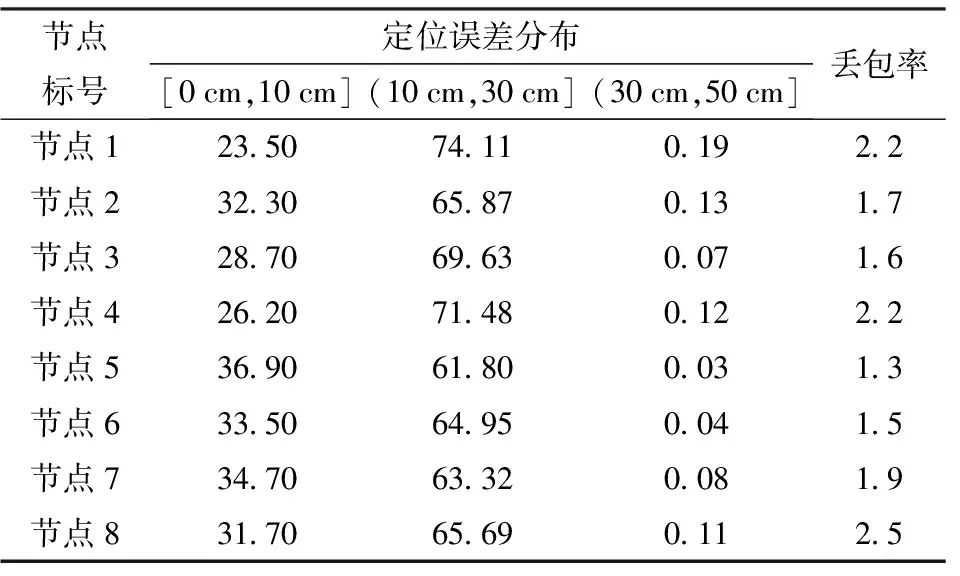
表1 节点定位精度测试
从表1中可以看出,各传感器节点精度主要集中在10~30 cm范围内,达到UWB定位精度的亚米级标准[15-17],与传统GPS[18-19]、WiFi[20-21]、蓝牙[22]等定位方式的精度(米级)相比,有较大提升。在系统定位测试过程中,部分节点测量位置误差大于50 cm,主要是由于基站间的非精准时钟同步,以及试验开始时人员走动产生遮挡所导致。对数据包丢失率(PLR)进行计算,公式为
式中A——数据包丢失率
n——丢失数据包个数
N——数据包总数
以节点1为例,丢包率为:[1 000-1 000×(23.5%+74.11%+0.19%)]/1 000×100%=2.2%。同时,各节点最大丢包率为2.5%,平均丢包率为1.9%,满足温室测量基本需求[23]。其中,节点1和节点4因通风扇的运转影响了传感器的精度和稳定性;节点8因与主基站之间传输距离过远,数据包容易丢失或损坏,造成丢包率偏高。为尽可能减小丢包率,可以通过重新设计网络拓扑和优化设备配置,有效减少数据包的误差率,从而降低数据包丢失率。
4.3 可视化测试
在温室内,检测点通常均匀分布,但通风扇、冷雾机等设备会对环境参数产生较大影响。因此,反距离加权插值算法[24]更适合于温室三维温湿度场的可视化。
通过HTML5 Canvas实现温室三维温湿度可视化,首先需要建立相应温室模型,然后把温度、相对湿度三维云图添加到温室模型中,模拟3D效果,最后添加查询、扫描等功能。试验地点选择昆明理工大学智慧农业教学科研基地温室,试验时间选择2022年1月15日14:00—17:00,期间温室内平均温度为18.3℃,平均相对湿度为57.8%。与单点式检测系统相比,在本系统三维检测效果中可以明显看出在温室垂直空间内,温度由地面向温室塑料薄膜呈现逐渐升高的趋势,温差最高可达5℃左右,这主要是由土壤水分蒸发及植物呼吸作用带走热量所导致。在纵向上,温室内温度由温室进口向温室内深处逐渐升高,通过对温室密封性检查,发现温室大门存在宽20 cm左右缝隙,由此认为温室进口密封缺陷是带来纵向温差的主要原因。三维可视化效果图如图19所示。
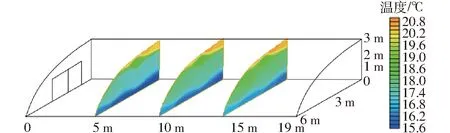
图19 三维可视化效果图
5 结论
(1)设计了基于UWB定位的智能温室三维温湿度检测系统,通过UWB室内定位技术建立无线传感器数据传输网络,在保证传感器数据稳定传输的同时,提高了各传感器节点位置精度,提供了从数据采集到远程监测的完整方案,能够有效实时监测温室内三维温湿度变化。
(2)以Microsoft Visual Studio软件设计了上位机远程监测软件,实现了传感器数据的远程监测和历史查询,并通过HTML5 Canvas软件在Web端对温室温湿度进行了三维可视化。
(3)系统下位机设计了一种集成DW1000芯片和STM32F103C8T6微处理器的最小系统板,通过测试,该STM32F最小系统板能够准确完成各指令,在减小设备体积的同时,降低了系统成本,提升了系统可靠性。
