水稻高速插秧机固体颗粒肥料变量施肥装置设计与试验
2023-09-23刘赛赛王宇唯王曦成李泽华
马 旭 赵 旭 刘赛赛 王宇唯 王曦成 李泽华
(1.华南农业大学工程学院,广州 510642; 2.岭南现代农业科学与技术广东省实验室,广州 510642;3.华南农业大学数学与信息学院,广州 510642)
0 引言
合理施用化肥是保证水稻产量的重要因素。变量施肥技术是精准农业的重要组成部分,依据实际生产所需施肥量精准施肥,能够有效地提高经济、社会和生态效益[1-4]。因此,研究固体颗粒肥料变量施肥技术与装置,可为水稻高速插秧机与同步科学施肥提供技术支撑。
目前,国内外肥料流量检测方法主要有直接称量法、光电法、排肥轴标定法、电容法和微波多普勒法等。SWISHER等[5]采用激光发射器将光传输到光电二极管阵列,通过肥料对光线遮挡强度间接测得肥料流量。VAN BERGEIJK等[6]基于动态称重方法获取肥料质量,并结合位置信息实现肥料合理施用。BACK等[7]利用摄像头采集肥料颗粒下落图像,通过图像识别方法得到肥料颗粒直径及数量,获得肥料实时流量。GRIFT等[8]根据光学传感器输出集群长度与肥料流量的关系模型检测肥料流量。周利明等[9]设计了一种基于电容法的施肥量在线检测系统,根据肥料经过电容两极板时极板介电常数发生变化,使得输出电容发生变化,以此获取肥料流量。杨立伟等[10]设计了一种基于微波多普勒法的肥料流量检测系统。丁永前等[11]提出了基于动态称量原理的泛函式播种施肥量检测方法。余洪锋等[12]提出了一种基于皮带秤的施肥量检测装置用于检测排肥口肥料流量。赵斌等[13]利用编码器测量排肥轴转动的周数及角度的方法间接测量肥料流量。目前研究成果仍存在不足,光电法易受肥料粉末影响,电容法和微波多普勒法易受电磁干扰影响,直接称量法受田间振动影响较大,导致测量精度变低。
近年来,国内外变量施肥方法主要采用电控、液压控制、气动控制和机械式无级变速等控制方式[14-18]。美国凯斯(Case)公司研制的Flexicoil系列变量施肥播种机,根据施肥处方图,通过控制液压马达调节排肥轴转速,实现变量施肥,可同时对3种肥料进行变量控制[19]。德国AMAZONE公司研发了一种基于视觉传感器的变量施肥机,通过作物长势传感器,测得叶绿素含量,并计算所需施肥量,通过液压驱动装置控制离心撒肥盘工作转速,实现变量施肥[20]。法国库恩(Kuhn)公司研制的Axis系列悬挂式变量撒肥机,通过撒施分布处方图,集成 CDA 撒肥系统、称量系统及自动调节撒肥量的精准变量EMC 控制系统,自动调节撒肥盘开度与角度,实现变量施肥作业[21]。CAMPBELL等[22]设计了一种双圆盘撒肥机,通过控制液压流量比例阀的开度和转盘转速,结合机具前进速度进行变量施肥作业。OLIESLAGERS等[23]研究了转盘转速对圆盘式撒肥机撒肥分布的影响,设计了变量施肥控制系统,通过控制转盘转速实现变量施肥。胡晓丽等[24]设计了小型变量施肥机,采取控制排肥轮转速和排肥轮长度的方式有效控制施肥量。贾洪雷等[25]研制了2BDB-6(110)型大豆仿生智能耕播机,基于系统采集插秧机前进速度,结合处方信息控制排肥轴转速调节施肥量。郭明伟等[26]设计了小麦种肥同播一体机,通过手动调节变速齿轮调节排肥轴转速,变化排肥量,实施变量施肥作业。马旭等[27]进行变量施肥机具的设计,根据农田参数,读取IC卡中所需施肥量,并结合地轮转速信息控制排肥轴转速。齐兴源等[28]设计了稻田气力式变量施肥机,在变量施肥作业时,按照所需施肥量并结合插秧机前进速度,实时调节排肥轴转速,实现变量施肥作业。可以看出,国内多数变量施肥技术与装置,主要采用传统的机械技术通过标定的方式实现变量施肥作业,施肥量调节精度受限制;国外主要采用光电、图像肥料流量检测方法和先进的液压调控技术,导致现有变量施肥插秧机具价格昂贵,推广难度较大[29]。
本文依托团队在井关PZ60型水稻高速插秧机上研制的同步侧深施肥机,采用气力输送式外槽轮排肥装置,提出一种基于压电原理的固体肥料流量检测方法,并通过控制插秧机传动机构,设计一种固体肥变量施肥装置,构建施肥量在线检测及智能调控系统,为智能农机装备精准作业提供快速和准确的变量施肥技术与装置。
1 整机结构与工作原理
1.1 总机结构与工作过程
固体颗粒肥料变量施肥装置安装在井关PZ60型水稻高速插秧机上,主要由井关PZ60型高速插秧机、控制系统、送肥风机、外槽轮排肥器、肥料流量检测机构、传动机构、输肥管、肥料堵塞报警机构及开沟器等组成,结构如图1所示。
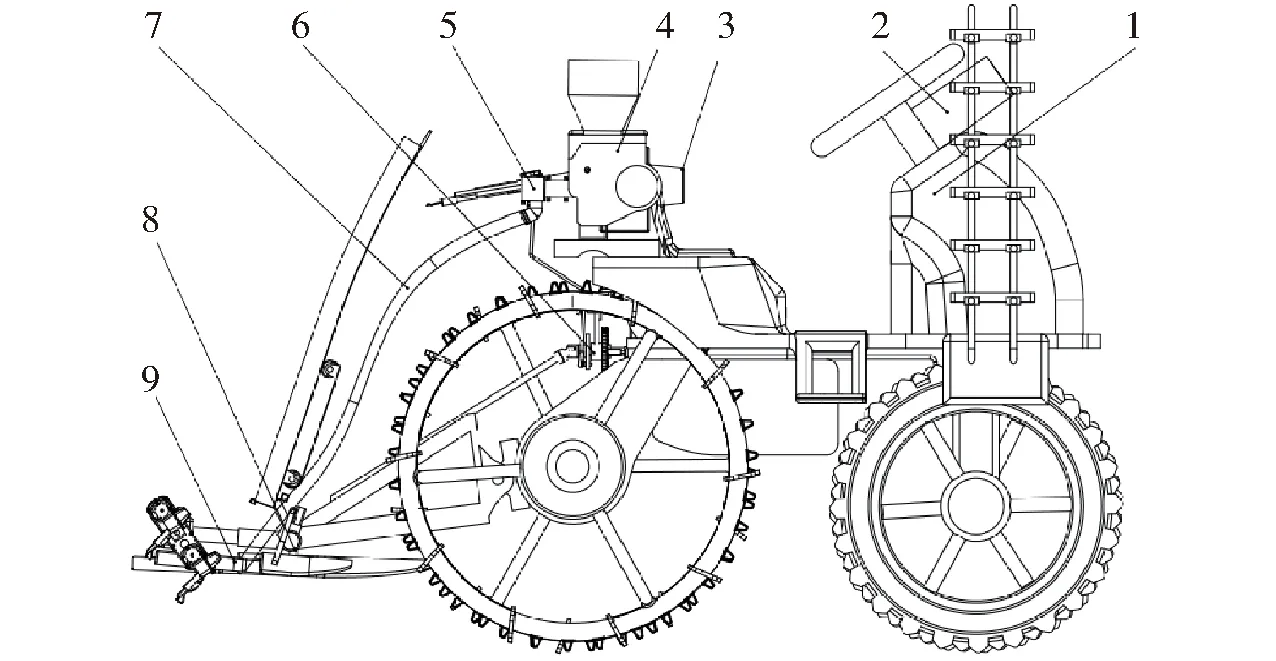
图1 带有同步施肥机构的水稻高速插秧机结构示意图
插秧机工作时,通过插秧机的发动机及传动机构为变量施肥装置提供动力,驱动外槽轮排肥器排肥,插秧机电力系统为送肥风机供电,送肥风机通过气流吹送使肥料沿肥料流量检测机构、输肥管及肥料堵塞报警机构(肥料规定时间不流动则声音报警)均匀排出,施到侧深开沟器在田间开出的沟内,完成侧深施肥作业。其中肥料流量检测机构安装在外槽轮排肥器出口采集肥料流量信息,根据设定施肥量,结合插秧机前进速度,通过控制系统调节传动机构改变外槽轮排肥器的排量,进而实现实际施肥量与设定施肥量一致,实施精准变量施肥作业。
1.2 传动机构及控制系统工作原理
传动机构主要由传动轴、链条、链轮、偏心轮、顶杆、万向节、摆动连杆、排肥传动轴、左棘轮机构、右棘轮机构及连杆机构等组成;控制系统主要由肥料流量检测机构、插秧机前进速度传感器、排肥轴转速传感器及推杆伸缩位移传感器等组成,结构如图2所示。
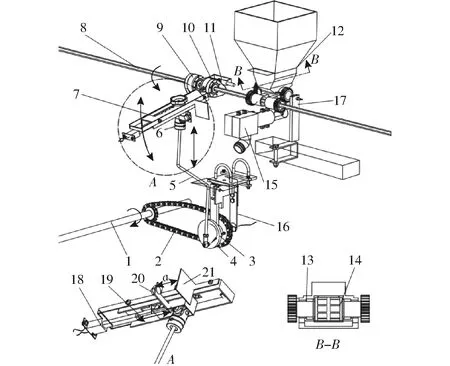
图2 传动机构及控制系统结构示意图
工作时插秧机的发动机为传动轴提供动力使其转动,通过链传动带动链轮和偏心轮旋转,顶杆在偏心轮转动过程中上下运动并带动摆动连杆往复运动。摆动连杆与排肥传动轴通过左、右棘轮机构连接,左、右棘轮机构反向安装并交替工作,使排肥传动轴无间断转动。当摆动连杆向上摆动时,在连杆机构作用下使左棘轮机构带动排肥传动轴转动;当摆动连杆向下摆动时,通过右棘轮机构带动排肥传动轴转动,排肥传动轴带动排肥轴转动,驱动排肥外槽轮排肥。排肥轴转速与排肥外槽轮转速相同,即传动比为1∶1,如图2所示。
肥料流量检测机构安装于外槽轮排肥器排肥口位置进行肥料流量检测。通过肥料冲击压电片传感器产生电压信号,即转化为压电片电压,通过构建肥料检测流量与压电片电压之间的变化规律模型,实时检测肥料流量。
根据变量施肥装置工作原理及分析,在进行施肥量调节时,需要掌握插秧机前进速度、排肥轴转速和推杆伸缩位移,进而实现变量施肥作业,为此需要对其主要参数进行精准测量。
插秧机前进速度传感器主要由编码器组成。编码器与链轮同轴心安装,链轮转动过程中,编码器输出脉冲信号,系统采集单位时间脉冲数,结合一个脉冲下插秧机前进距离(通过试验获得),计算插秧机前进速度。
排肥轴转速传感器主要由光电传感器组成。将光电传感器安装在排肥轴上,系统根据单位时间获取光电传感器发送的脉冲数,结合排肥轴每转实际脉冲数,计算排肥轴转速。
推杆伸缩位移传感器主要由电动推杆和激光测距传感器组成。激光测距传感器随电动推杆伸缩移动,电动推杆基础长度时,激光测距传感器与光源接收板间的距离为100 mm,通过实时检测激光测距传感器与光源接收板间的距离a,计算电动推杆工作长度l(见图2)。当系统检测施肥量发生变化时,基于肥料实际流量与排肥轴转速之间的变化规律模型、排肥轴转速与电动推杆工作长度和插秧机前进速度之间的变化规律模型自动调节电动推杆工作长度,改变摆动连杆的摆动幅度,使排肥轴转速变化,实际排肥流量也发生变化,进而达到预设施肥量的要求,实现精准变量施肥作业。
2 关键部件设计
2.1 肥料流量检测机构设计
2.1.1肥料流量检测机构安装位置确定
井关PZ60型水稻高速插秧机为6行作业,为了保证精准侧深施肥,对应设计6个排肥器,初步试验表明6个排肥器的总排量和单排量器均匀性都比较稳定,为节约装置成本,在变量施肥装置中仅安装1个肥料流量检测机构,通过检测单个排肥器的肥料流量,预测总肥料流量。为了确定肥料流量检测机构的安装位置,以挪威复合肥为试验材料,排肥轴匀速转动下,开展了6个排肥器的总排量和单排量试验(试验安排为排肥轴转动5圈,重复试验3次),试验结果如表1所示,施肥机各行一致性变异系数平均值为2.25%,其中2号排肥器排肥量与平均排肥量最为接近。因此,选定肥料流量检测机构安装于2号排肥器排肥口位置进行肥料流量检测,通过检测单体肥料流量预测6个排肥器的总肥料流量。
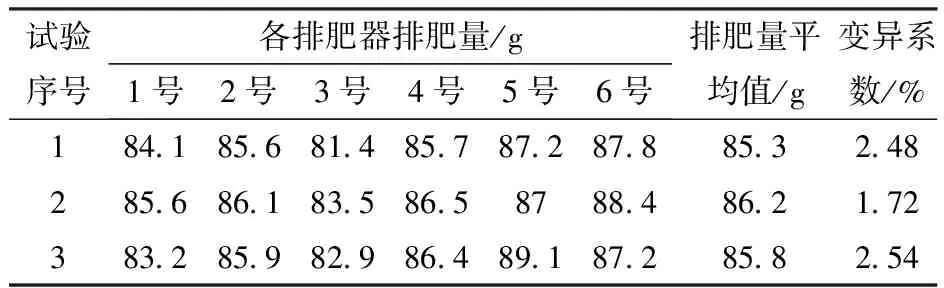
表1 排肥量各行一致性试验结果
2.1.2肥料流量检测机构结构设计
肥料流量检测机构是变量施肥装置的核心部件之一,主要由壳体、前板、后板、前压电片及后压电片等组成,结构如图3所示。
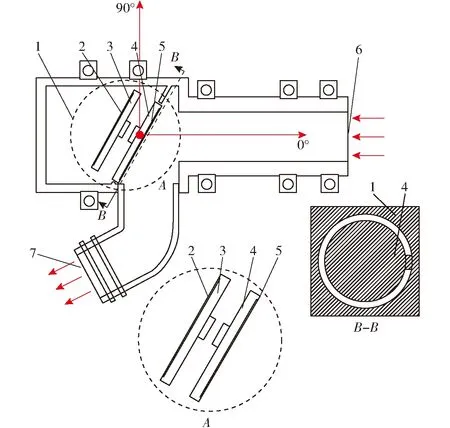
图3 肥料流量检测机构结构示意图
前、后板悬臂平行安装在壳体上,不接触;前、后压电片分别粘贴于前、后板上(图3放大部分);前板上压电片检测肥料冲击信号和机械振动信号;后板上压电片检测机械振动信号,肥料撞击前板后落下。前板和后板上压电片产生机械振动信号相似,因此,可通过电路差分方法有效地消除机械振动的影响[30-31]。
2.1.3肥料流量检测原理
前板上压电片产生的振动信号u1包括肥料冲击信号ui和机械振动信号un1,即
u1=ui+un1
(1)
后板上压电片产生的振动信号u2即机械振动信号un2,前板和后板上压电片产生机械振动信号相似,即
u2=un2≈un1
(2)
肥料冲击信号ui为
ui≈u1-u2
(3)
系统内部利用ADC数模转换电路采集肥料冲击信号ui,将其转换为压电片电压,通过建立肥料检测流量与压电片电压之间的变化规律模型,实时检测肥料流量。
2.1.4前板安装角度及风机风速确定
(1)工作参数双因素试验
为保证肥料可全部击中前板,且撞击前板后有较好的流动性,设计了排肥风机风力送肥,经试验,前板安装角度范围为50°~70°(平行地面方向为0°,见图3),风机风速范围为12~20 m/s。
为分析前板安装角度和风机风速两因素对肥料质量检测精度的影响,以挪威复合肥为试验材料,通过初步试验进行如下试验:选取前板安装角度为55°、60°、65°和风机风速为14、16、18 m/s进行二因素三水平试验,肥料质量检测精度每组试验重复3次,试验结果取平均值。采用Design-Expert 13.0软件进行数据处理和统计分析,试验方案与结果如表2所示。
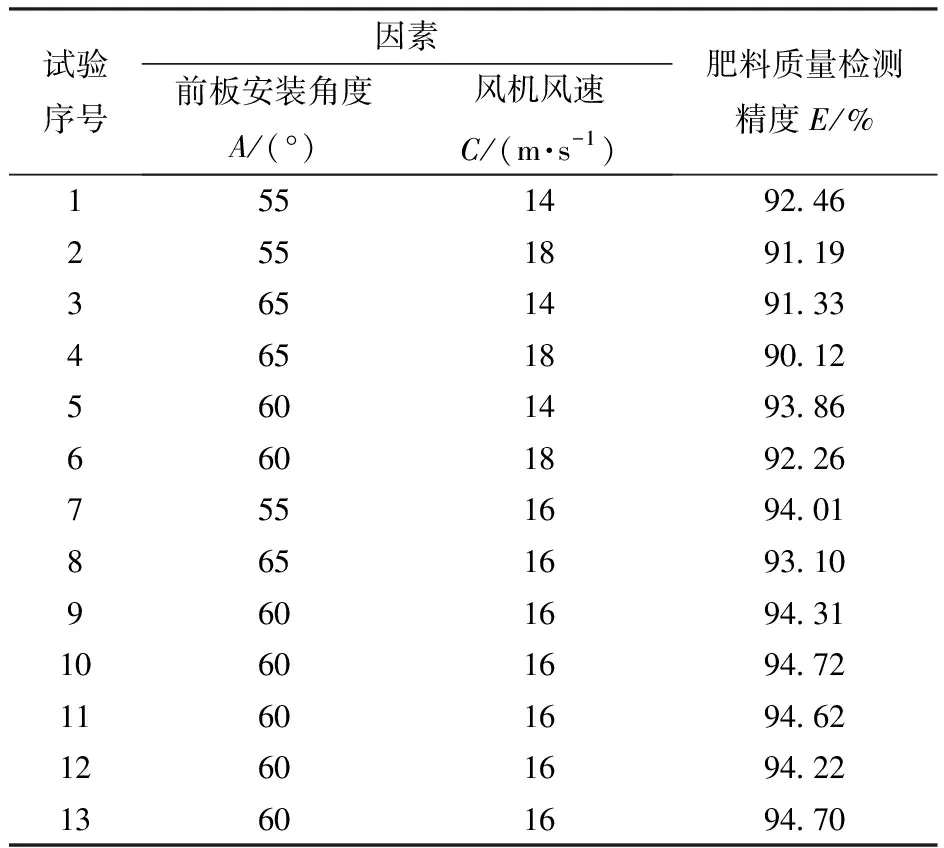
表2 试验方案与结果
(2)回归模型建立与显著性检验
采用Design-Expert 13.0软件,建立肥料质量检测精度E关于前板安装角度A、风机风速C回归模型,并检验模型和系数的显著性。
其方差分析结果如表3所示。
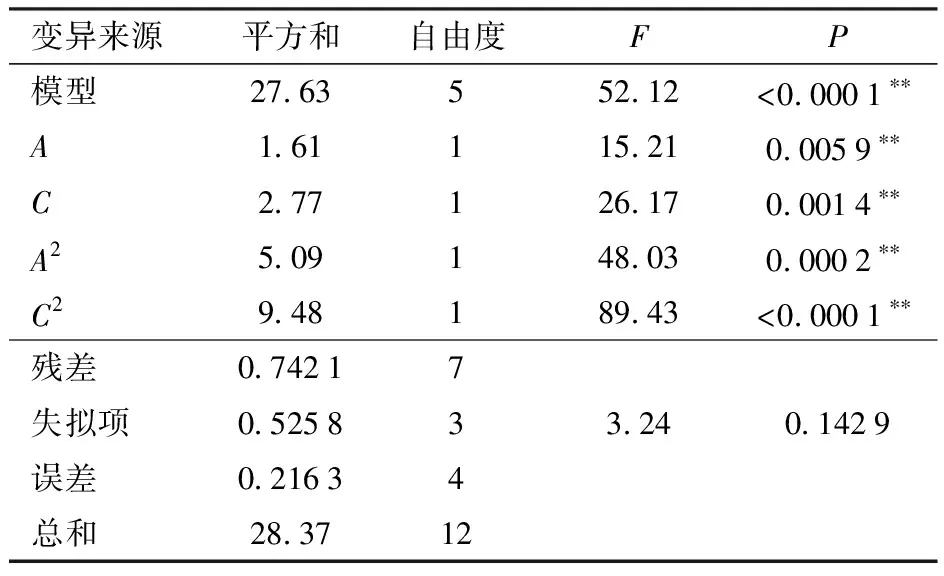
表3 肥料质量检测精度回归模型方差分析
由表3可知,肥料质量检测精度E回归模型通过显著性检验(P<0.01),因此模型有效,交互项AC的影响不显著,其他各项均通过显著性检验。
肥料质量检测精度E的回归方程为
E=-206.37+6.39A+14.39C-
5.43×10-2A2-0.46C2
(4)
由式(4)可知,肥料质量检测精度E与前板安装角度A和风机风速C呈开口向下的二次函数关系,表明存在前板安装角度和风机风速的最优参数组合。
各因素对肥料质量检测精度影响的主次因素为:风速、角度。通过高速摄像观察,当风速为16 m/s时,绝大部分肥料颗粒能够击中前板,仅有极少部分肥料颗粒间相互碰撞导致无法击中前板;当风速增大为18 m/s时,由于风速大使肥料颗粒相互碰撞明显增加,致使肥料质量检测精度下降。在风速为16 m/s时,随着前板安装角度变化,肥料质量检测精度大于93%,表明检测精度较好。
(3)参数优化
为了得到肥料流量检测机构的最优结构参数组合,采用单目标优化方法,同时优化肥料质量检测精度E。依据提高肥料流量检测精度的目标,结合各试验因素的边界条件,得到优化模型为
(5)
利用Design-Expert 13.0软件中的 Optimization模块进行参数优化并分析求解,结果表明,当前板安装角度为59.12°、风机风速为15.67 m/s时,肥料质量检测精度为94.74%,与表2中前板安装角度60°、风机风速16 m/s时检测精度为94.51%基本一致。
为便于参数测量,取其为整数,则确定组合参数为前板安装角度60°、风机风速16 m/s。
2.1.5肥料检测流量标定试验
使用井关PZ60型水稻高速插秧机与变量施肥装置进行肥料检测流量标定试验。肥料流量检测机构安装于排肥器出肥口位置,在肥料流量检测机构的肥料出口位置直接接肥,采用称量方法进行肥料检测流量标定试验。
根据华南地区水稻施基肥量最大分别为复合肥300 kg/hm2和尿素225 kg/hm2,计算得出单体外槽轮排肥器最大排肥量分别为复合肥9 g/s和尿素6.75 g/s,为了提高模型的显著性,在单体排肥器排肥流量分别为复合肥3~9 g/s和尿素2~7 g/s条件下分别取10种不同排肥流量进行标定,通过定时器定时排肥时间,待每次排肥结束后,采用电子天平称取实际排肥质量,同时记录肥料冲击信号ui转换的电压信号,即压电片电压,每次试验重复3次,对3种固体颗粒肥料(挪威复合肥、俄罗斯复合肥、国产尿素)分别进行标定试验。利用Origin软件对标定试验数据进行处理,得到肥料检测流量与压电片电压之间的变化规律模型为
(6)
式中U——单位时间压电片电压,V/s
q——肥料检测流量,g/s
关系曲线如图4所示。
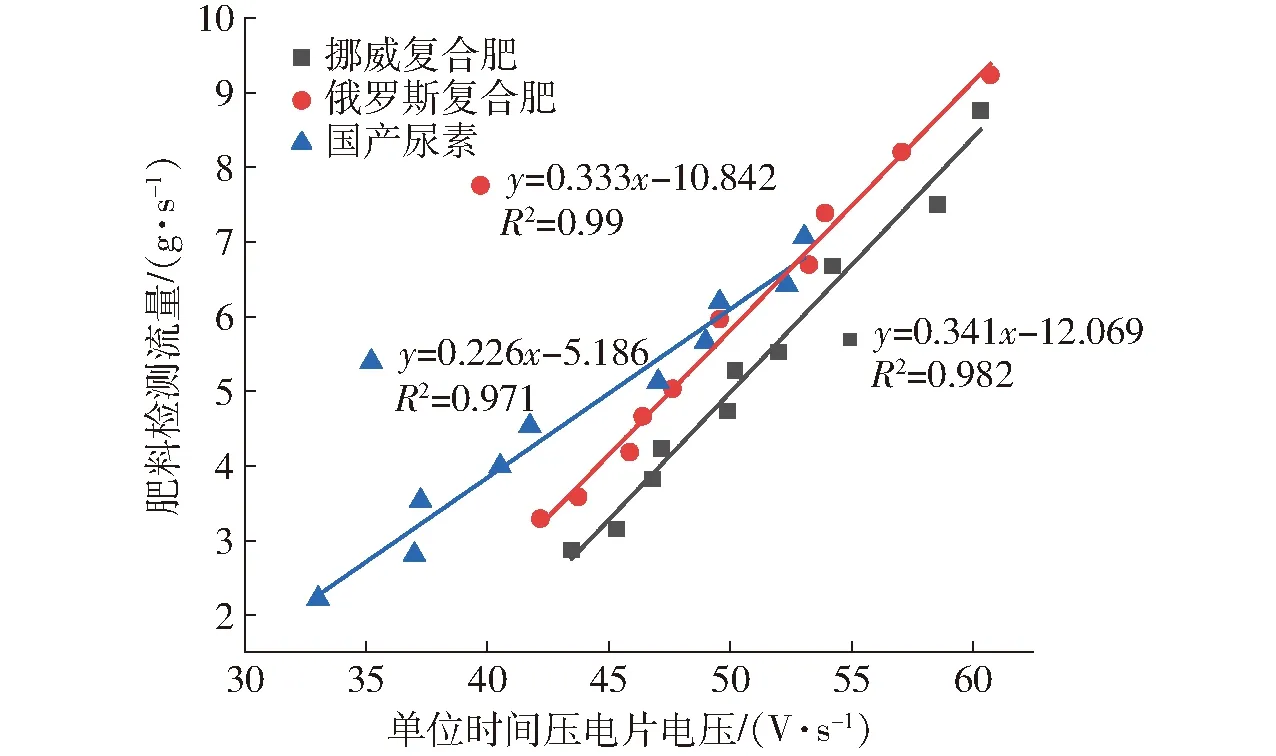
图4 肥料检测流量与压电片电压之间变化曲线
由图4可知,3种固体颗粒肥料检测流量与压电片电压之间均呈线性关系,且随着压电片电压增加,肥料检测流量也相应变大。经检验,3组拟合方程的决定系数R2分别为0.982、0.99和0.971,表明线性关系显著。可以看出,在相同的压电片电压下,其肥料检测流量略有差异,如要精确施特殊肥料时,需要对肥料提前进行标定,对其它类似的肥料可以参考式(6)计算肥料检测流量。
2.1.6肥料实际流量标定试验
使用井关PZ60型水稻高速插秧机与变量施肥装置进行肥料实际流量标定试验。在10种排肥轴转速下,通过定时器定时排肥时间,待每次排肥结束后,采用电子天平称取实际排肥质量,同时记录排肥轴转速,每次试验重复3次,对3种固体颗粒肥料(挪威复合肥、俄罗斯复合肥、国产尿素)分别进行标定试验。其中,排肥轴转速由光电传感器检测,即
(7)
式中c——排肥轴每转实际脉冲数,个/r
c1——每秒钟采集的脉冲数,个/s
n——排肥轴转速,r/s
利用Origin软件对标定试验数据进行处理,得到肥料实际流量与排肥轴转速之间的变化规律模型为
(8)
式中q0——肥料实际流量,g/s
关系曲线如图5所示。
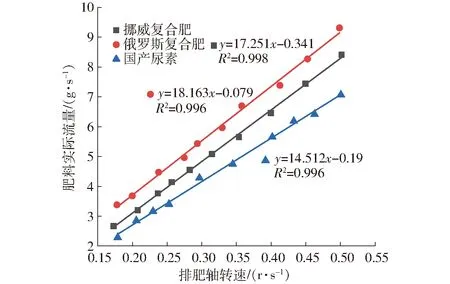
图5 肥料实际流量与排肥轴转速之间变化曲线
由图5可知,3种固体颗粒肥料实际流量与排肥轴转速之间均呈线性关系,且随着排肥轴转速的增加,肥料实际流量也相应变大。3组拟合方程的决定系数R2分别为0.998、0.996和0.996,表明线性关系显著。可以看出,不同肥料在相同的排肥轴转速下,其肥料实际流量略有差异。因此,控制系统可利用关系模型进行肥料实际流量调控。
2.1.7插秧机前进速度标定试验
为了准确检测施肥量,需要及时掌握插秧机前进速度,插秧机前进速度由编码器检测。
系统读取编码器每秒钟发送的脉冲数,结合一个脉冲对应插秧机前进距离计算插秧机前进速度,则插秧机前进速度为
(9)
式中v——插秧机前进速度,m/s
D——一个脉冲下插秧机前进距离(根据试验标定得到一个脉冲下插秧机前进距离为1.484 cm)
f——编码器每秒种发送的脉冲数,个/s
2.1.8排肥轴转速控制模型标定试验
使用井关PZ60型水稻高速插秧机与变量施肥装置进行排肥轴转速控制模型标定试验。插秧机在一定前进速度下,调节电动推杆不同工作长度可以改变排肥轴转速,进而实现变量施肥作业。经试验,电动推杆工作长度过长,上下摆动过程中与秧苗移箱器发生碰撞;长度过短,施肥量过小,无法满足水稻生产过程中所需施肥量,当选取电动推杆工作长度为0~60 mm(基础长度105 mm)、插秧机前进速度为0.4~1.4 m/s时,挪威复合肥、俄罗斯复合肥和国产尿素施肥量范围分别为170~360 kg/hm2、185~380 kg/hm2和145~300 kg/hm2,满足目前水稻生产过程中施底肥量的需要。在7种插秧机前进速度(0.4~1.4 m/s)和8种电动推杆工作长度(0~60 mm)下,试验记录排肥轴转速,每次试验重复3次,利用Origin软件对标定试验数据进行处理,得到排肥轴转速与电动推杆工作长度和插秧机前进速度之间的变化规律模型为
n=1.01×10-2v2+1.05×10-5l2+5.84×10-3vl+
0.282v-9.41×10-4l+0.018
(10)
试验关系曲面如图6所示。由图6可知,排肥轴转速与电动推杆工作长度、插秧机前进速度之间呈曲面关系,且随着插秧机前进速度变化或电动推杆工作长度变化,排肥轴转速也变化。拟合方程的决定系数R2为0.997,表明关系显著。
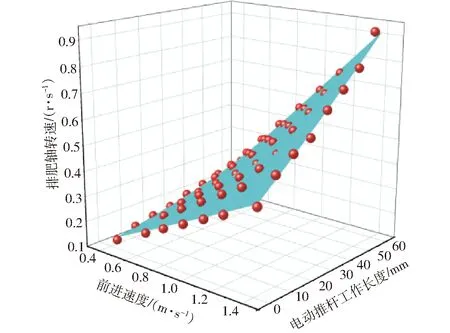
图6 电动推杆工作长度和插秧机前进速度与排肥轴转速之间的关系曲面
利用式(10)调控电动推杆工作长度达到所需排肥轴转速,改变实际排肥流量,进行变量施肥作业。
2.2 控制系统设计
2.2.1硬件设计
控制系统硬件构成如图7所示,控制器以STM32为核心,STM32单片机内置串口资源;电力系统选用6-QW-36电源、LM2596S降压模块,为控制器STM32单片机供电;肥料流量检测机构中选用2片FT-50T-3A1型压电片;插秧机前进速度传感器选用K22-ABZ-20P/R型编码器;排肥轴转速传感器选用GJ18-D80NK型光电传感器;推杆伸缩位移传感器选用XKC-KL200-UART型激光测距传感器、LA-T8-12-30-30-60/105型电动推杆及L9110型H桥模块,根据激光测距传感器检测电动推杆工作长度,通过L9110型H桥模块控制电动推杆启停、伸缩。
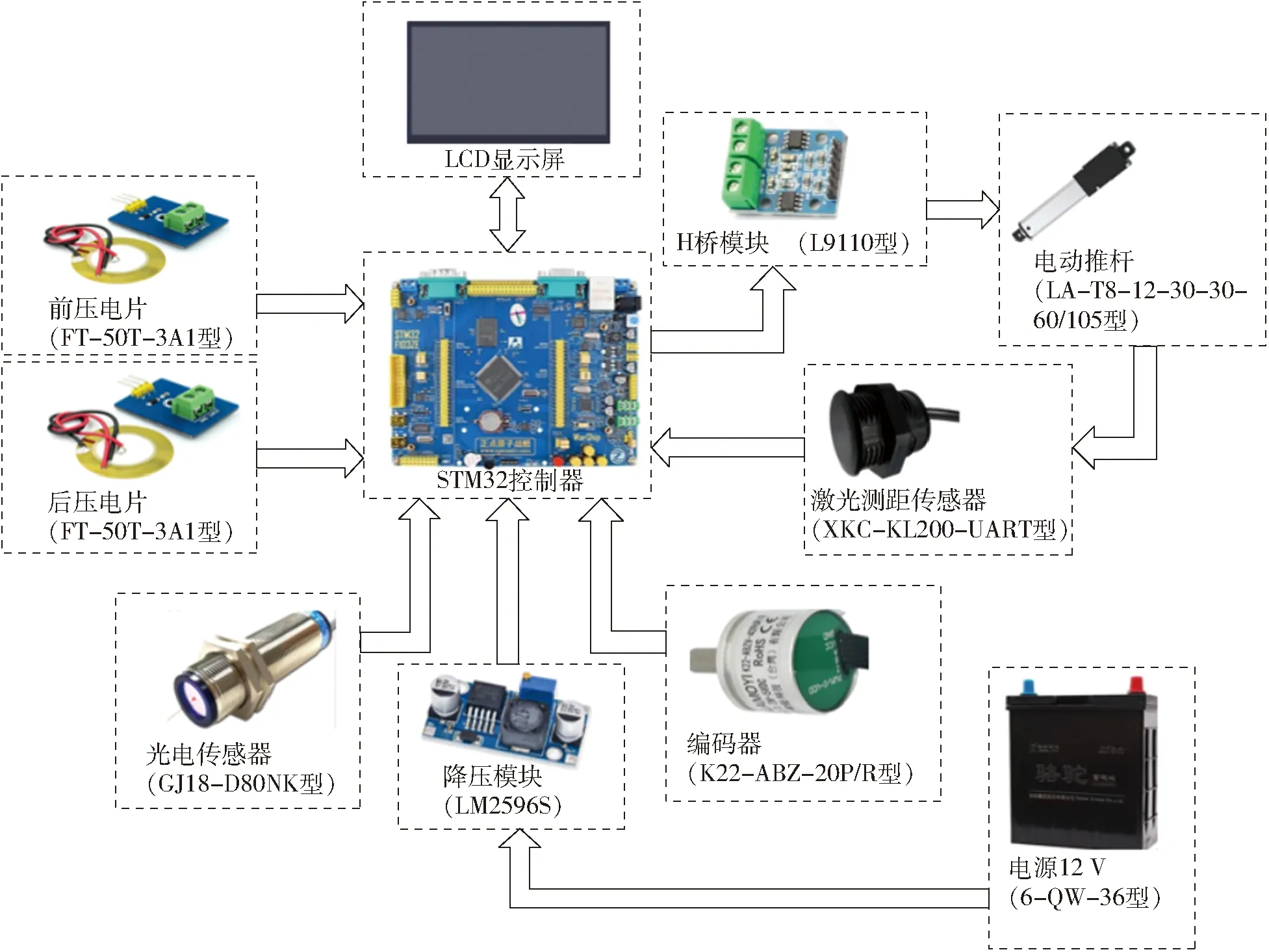
图7 控制系统硬件构成图
2.2.2控制算法设计
系统检测施肥量为
(11)
式中Q——检测施肥量,kg/hm2
W——排肥器数,个
B——插秧机具作业幅宽,m
系统计算预设肥料调控流量为
(12)
式中Q′——预设施肥量,kg/hm2
q′——预设肥料调控流量,g/s
控制系统开始工作时,系统进行初始化,通过手动指令输入肥料类型和施肥量,系统根据式(6)检测肥料流量,式(9)得到插秧机前进速度,式(11)检测施肥量,系统检测3次施肥量的平均值作为输出(每秒检测一次),并与预设施肥量进行比较,如果检测3次施肥量的平均值超过预设施肥量的10%,即
(13)
则进行如下调控。
由式(8)可知,外槽轮排肥器的肥料实际流量与排肥轴转速呈线性关系[32-33],因此,可对排肥轴转速进行调控,改变实际排肥流量,计算调控的排肥轴转速方程为
(14)
式中k——比例系数(即式(8)的斜率)
n′——调控的排肥轴转速,r/s
系统用式(12)计算预设肥料调控流量、式(14)计算调控的排肥轴转速,将调控的排肥轴转速代入式(10)计算电动推杆工作长度,通过系统调节电动推杆工作长度,改变实际排肥流量,进而达到预期施肥量,控制流程图如图8所示。
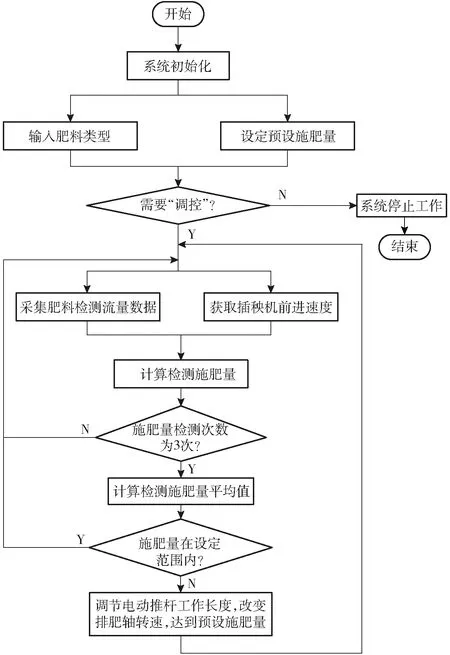
图8 控制系统流程图
3 性能试验
为检验固体颗粒肥料变量施肥装置性能,搭建试验平台,并开展了田间试验。以挪威复合肥、俄罗斯复合肥和国产尿素为试验材料进行肥料质量检测精度和施肥量调控性能试验,并进一步分析试验结果。
3.1 试验平台搭建
样机试验地点为华南农业大学工程学院农业工程楼,试验设备主要有井关PZ60型水稻高速插秧机与固体颗粒肥料变量施肥装置,试验现场如图9所示。
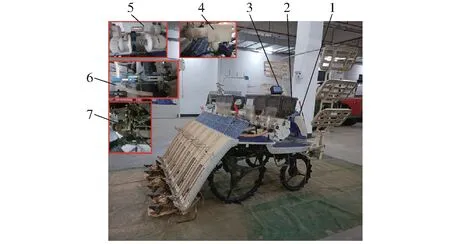
图9 室内试验装置
3.2 肥料质量检测精度试验
为验证不同排肥流量条件下肥料流量在线检测系统的准确性,试验时,插秧机1 m/s匀速前进下,分别设定排肥轴转速为20、25、30 r/min,同时在输肥管出肥口下方排肥,将肥料流量检测系统获得的肥料质量与实际排肥质量对比,每组试验重复3次,试验结果如表4所示。
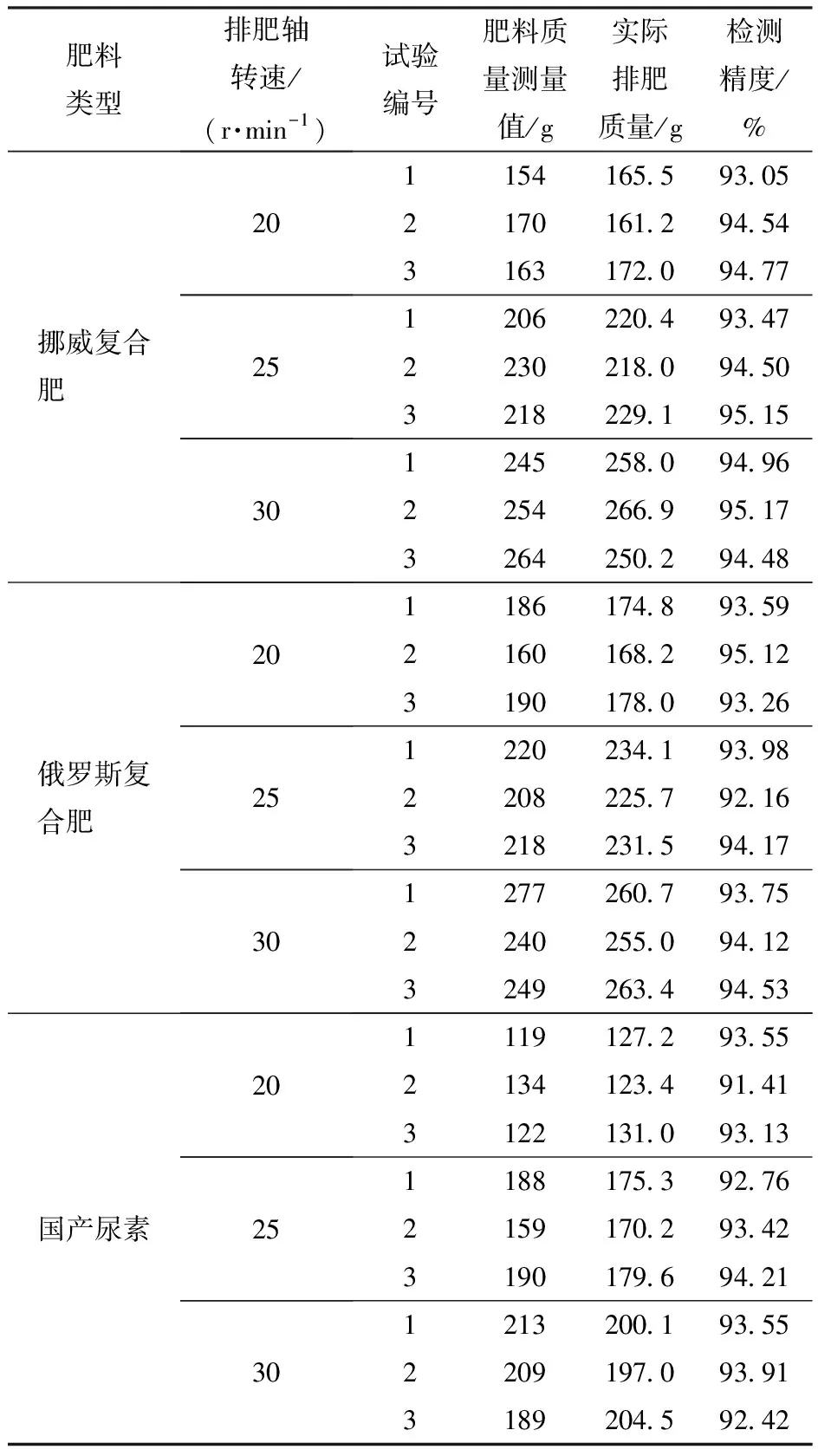
表4 肥料质量检测精度试验结果
由表4可知,在不同排肥轴转速条件下,挪威复合肥质量检测精度平均值分别为94.12%、94.37%和94.87%;俄罗斯复合肥质量检测精度平均值分别为93.99%、93.44%和94.13%;国产尿素质量检测精度平均值分别为92.7%、93.46%和93.29%。3种固体颗粒肥料总体质量检测精度平均值分别为94.45%、93.85%和93.15%。试验结果表明,采用压电原理的固体颗粒肥料流量检测方法在不同排肥轴转速下对不同品种颗粒肥料具有良好的适应性。
3.3 施肥量调控试验
为验证施肥量调控性能,开展不同品种颗粒肥料和施肥量条件下调控试验。试验时,设定复合肥施肥量为200、250、300 kg/hm2和尿素施肥量为165、195、225 kg/hm2,插秧机前进速度为0.6~1.4 m/s,同时在输肥管出肥口下方排肥,每次试验共计测定排肥时间16 s;试验后,在试验区域内测量每秒排肥量,计算单位面积施肥量,并记录最大误差和计算调控稳定后施肥量的变异系数,施肥量调控规律见图10,测量试验结果分析如表5所示。
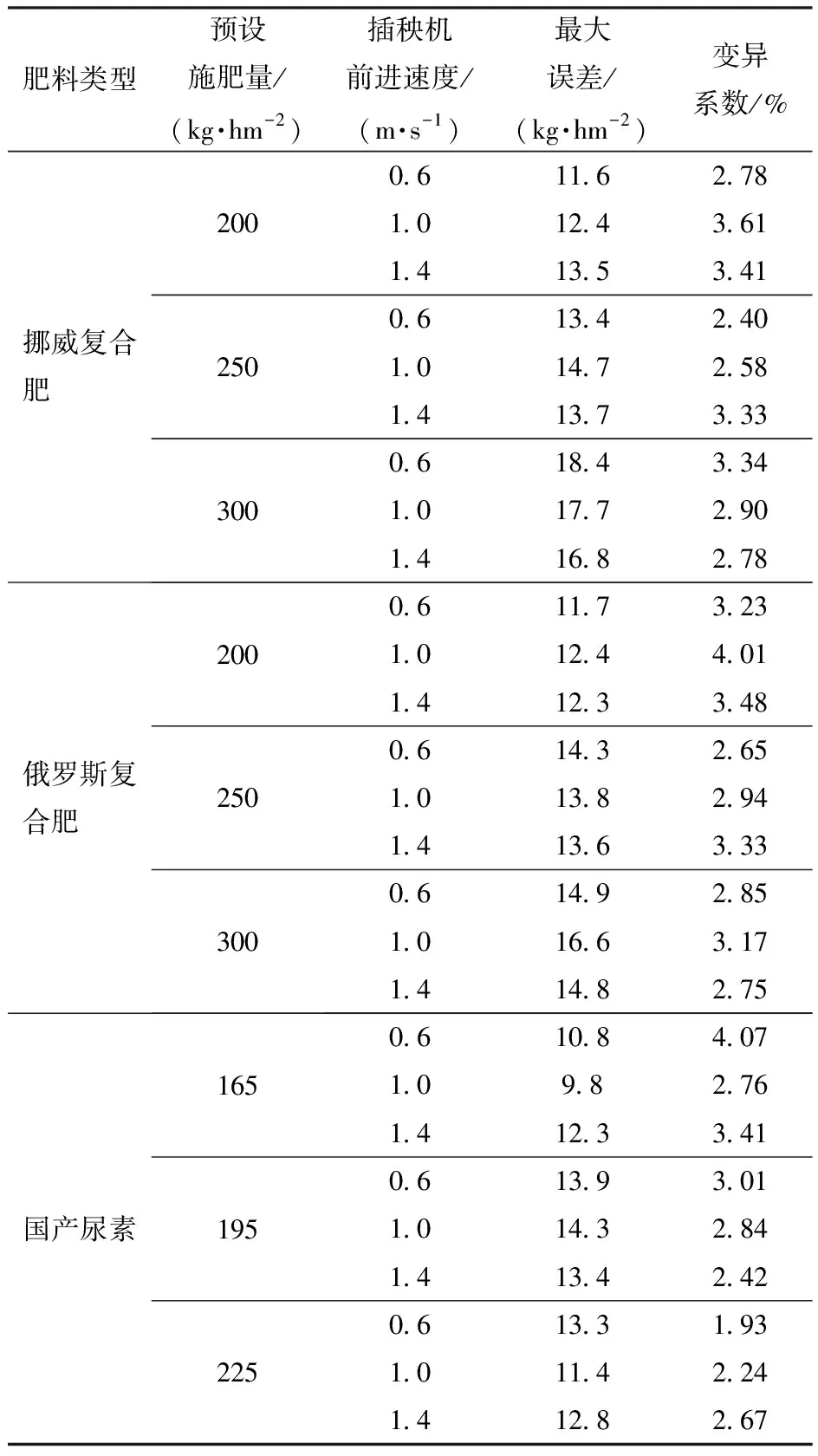
表5 施肥量调控试验结果
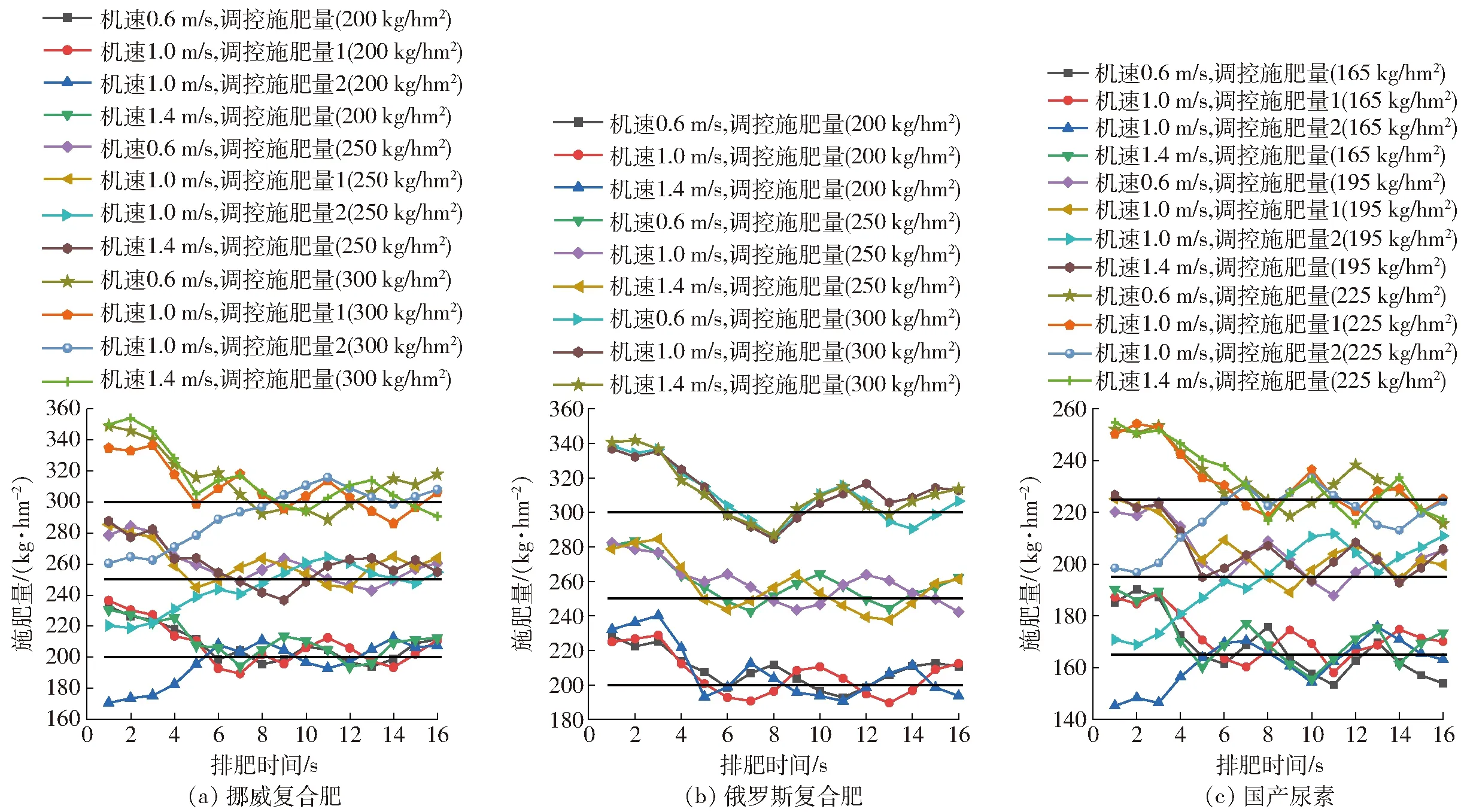
图10 施肥量调控试验结果
从表5和图10可以看出,控制系统经1~2 s调控施肥量稳定且与设定施肥量的误差在设定范围内。在复合肥施肥量为200、250、300 kg/hm2和尿素施肥量为165、195、225 kg/hm2条件下,调控后,挪威复合肥施肥量变异系数平均值分别为3.27%、2.77%和3.01%;俄罗斯复合肥施肥量变异系数平均值分别为3.57%、2.97%和2.92%;国产尿素施肥量变异系数分别为3.45%、2.76%和2.26%。3种固体颗粒肥料总体施肥量变异系数平均值分别为3.02%、3.15%和2.82%。试验结果表明,在插秧机前进速度不同条件下,调控后对不同施肥量和不同品种的颗粒肥料具有较好的施肥稳定性,满足水稻种植变量施肥作业的技术要求。
3.4 田间试验
利用井关PZ60型水稻高速插秧机与变量施肥装置,于2022年8月4日在广东省肇庆市沙浦农场进行晚稻精准变量施肥田间性能试验,试验现场如图11所示。试验地面积为1 hm2,试验肥料为挪威复合肥;试验前,将已知肥量的挪威复合肥放入插秧机中,根据农艺要求设定施肥量;试验中,插秧机以速度1~1.4 m/s前进;试验后,将施肥机中剩余肥料排出称量,通过作差方法计算肥料施入量,结合作业面积信息测得实际施肥量,将实际施肥量与预设施肥量对比,试验结果如表6所示。

表6 变量施肥田间试验结果
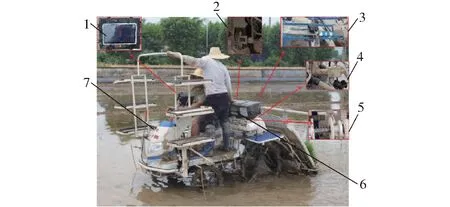
图11 田间试验
由表6可知,设定施肥量为180、225 kg/hm2,测得实际施肥量分别为189.2、220.1 kg/hm2,施肥量准确率分别为94.89%和97.82%。试验结果表明,设计的变量施肥装置在大田工作环境中仍能保持良好的施肥量控制精度,能够满足水稻侧深变量施肥作业的技术要求。
4 结论
(1)基于气力输送式外槽轮排肥装置,提出了一种压电原理的固体颗粒肥料流量检测方法,并通过控制插秧机传动机构,设计了一种固体颗粒肥料变量施肥装置,实现了固体颗粒肥料施肥量在线检测及智能调控的精准变量施肥作业。
(2)采用Central Composite Design试验设计方法,进行了肥料流量在线检测系统性能试验,应用单目标优化方法对肥料流量在线检测系统性能影响因素进行优化,得到最优前板安装角度和风机风速参数组合;通过标定试验构建了主要固体颗粒肥料检测流量与压电片电压之间的关系模型、实际流量与排肥轴转速之间的关系模型、排肥轴转速与电动推杆工作长度和插秧机前进速度之间的关系模型,为固体颗粒肥料变量施肥装置精准调控提供了基础。
(3)开展了不同条件下的室内和田间试验,试验结果表明,固体颗粒肥料变量施肥装置调控施肥量准确。开展了排肥轴转速分别为20、25、30 r/min肥料质量检测精度试验,当插秧机前进速度为1 m/s匀速条件下,3种固体颗粒肥料总体质量检测精度平均值分别为94.45%、93.85%和93.15%;进行了复合肥施肥量为200、250、300 kg/hm2和尿素施肥量为165、195、225 kg/hm2调控性能试验,当插秧机前进速度为0.6~1.4 m/s条件下,3种固体颗粒肥料总体施肥量变异系数平均值分别为3.02%、3.15%和2.82%;进行了施肥量分别为180、225 kg/hm2的田间试验,当插秧机前进速度为1~1.4 m/s条件下,挪威复合肥施肥量准确率分别为94.89%和97.82%,本研究设计的固体颗粒肥料变量施肥装置调控性能稳定,满足水稻种植变量施肥作业的技术要求。
