信号系统故障情况下的 RM 模式行车法研究
2023-09-21郭子兴马宝奎
郭子兴,马宝奎,李 征
(1. 北京市地铁运营有限公司运营四分公司,北京 102206;2. 北京市地铁运营有限公司调度指挥中心,北京 100035)
1 引言
地铁信号系统采用基于通信的列车自动控制(CBTC)方式,其主要由列车自动防护(ATP)、列车自动监控(ATS)、列车自动驾驶(ATO)、计算机联锁(CI)等子系统组成,是行车组织和列车运行自动化系统的核心,具有超速防护、自动驾驶、自动调整行车间隔等功能。地铁信号系统发生故障时,轻则使列车施加紧急制动,重则导致故障区段列车长时间迫停区间无法运营,行车调度无法通过ATS确定列车位置、道岔状态。
遇站间区间轨道区段故障,列车无法按进路闭塞法行车时,为维持列车运行,通常采用的措施为电话闭塞法,即相邻车站通过电话进行联系,以电话记录号码为依据,实现同一区段、同一时段只允许单独一组列车运行。由于行车调度从确认、调整列车位置到完成调度命令发布的时间较长、车站办理人工接发车作业流程繁琐、列车运行速度不得超过50 km/h、同一区段只允许一组列车运行等条件,导致执行电话闭塞法后列车运行延误较大。
为减少延误,快速开通正线,国内主要通过取消电话闭塞法书面调度命令、优化行车调度确认列车位置过程、提高限制运行速度等方式优化通行能力,本文主要研究故障区段使用限制位人工驾驶模式(RM)行车法替代电话闭塞法的适用性及效果。
2 主要规则和实施流程
2.1 主要规则
RM行车法是在无法使用进路闭塞法行车时,在确保安全系数的前提下,为维持连续运营,基于车载ATP和人工控制,最大化提高运输能力的行车方式,其主要规则如下。
(1)除调车、折返作业时,故障区段地面信号机需停用。
(2)对于无法建立RM的列车,司机须采用非限制人工驾驶模式(NRM)运行,列车速度不得超过25 km/h。
(3)中心及车站无法通过信号设备确认故障区段内的道岔位置时,列车运行中遇道岔,应在道岔前一度停车,确认道岔开通方向正确后,以不超过15 km/h越过该道岔。
(4)使用RM行车,需保证安全行车间隔,为便于司机观察,根据线路百米标设置列车运行间隔不得小于100 m,当列车运行间距小于100 m时应立即停车。如遇紧急情况时应及时采取紧急制动措施,并向行车调度报告。
2.2 实施流程
行车调度在判断无法按进路闭塞法行车后,会同故障区段内设备集中站综控人员确认故障情况及影响范围,并与列车司机确认车载设备情况。向司机、综控人员发布执行RM行车调度命令,命令车站综控人员确认区间道岔位置正确且锁闭,令迫停故障末端区段列车降级NRM或RM驶出故障区段。
3 行车间隔的确定
使用RM行车,需保证列车的安全行车距离,以确保当遇前方线路有停留车辆时能够避让且不发生相撞,因此判断车辆、线路条件是否满足RM安全行车要求,需计算分析各区段可视距离是否大于列车最小安全间隔。
3.1 列车最小安全间隔计算
3.1.1 计算方法
列车制动过程大致分为2部分:第一部分是从开始实施制动到全列闸瓦压上车轮这一瞬间的空走过程,列车在此过程中靠惯性力运行所走的距离即空走距离;第二部分是闸瓦压上车轮到列车停止的过程,即有效制动距离。
使用“相撞模型”计算列车最小安全间隔,如图1所示,假设前方列车停止于运营线上,后方列车采取紧急制动停车,后方列车从发现并施加紧急制动到列车停止时两车刚好相触碰,则有:

图1 列车紧急制动“相撞模型”
式(1)中,V0为后方列车初速度,m/s;T为司机反应时间,s;Sn为空走距离,m;Sk为有效制动距离,m。
3.1.2 计算实例
司机反应时间是指从潜在危险出现的时刻到司机开始采取措施的时间段。研究表明,司机危机感知时刻是影响紧急制动反应时间的重要因素,司机感知到危险的紧急制动平均反应时间为0.5~1 s。
地铁车辆按照《地铁车辆通用技术条件》(GB/T 7928-2003)相关技术规格进行设计,分为A、B 2种车辆类型,其最大常用制动平均减速度不低于1.0 m/s2,紧急制动平均减速度不低于1.2 m/s2。实际制动距离需考虑列车制动缸性能、线路曲线半径、坡道等多种影响因素。以北京地铁15号线车辆为试验对象,该车为B型DKZ31列车,初速度25 km/h条件下,按照GB/T 7928-2003中减速度的规定,平直区段紧急制动距离约为25 m,考虑坡度条件,下行孙河至马泉营区段,坡度26.073‰,紧急制动距离约为35 m。
为确保运行安全,取司机平均反应时间2 s,代入公式(1),列车最小间隔为54.32 m时,两车刚好相触碰,即为列车最小安全间隔。
实际RM行车中,当列车实际速度超过25 km/h时将自动施加最大常用制动,故列车实际运行速度平均保持在20~22 km/h,紧急制动距离将会相应缩短。
3.2 各区段可视距离计算
3.2.1 计算方法
列车在直线区段运行时,视距大于200 m,能够保障列车安全运行。列车在隧道曲线区段运行时,受空间结构及曲线半径影响目视范围减小,又因疏散平台设置在线路左侧,故司机视距最不利点为列车在单线隧道最小曲线半径区段右转时,视线相切于隧道内壁所能看到的距离,此时视距若大于列车最小安全间隔,则判定线路、车辆条件满足RM行车法。
单线隧道建筑结构分为矩形、圆形和马蹄形,司机视野随列车速度提高而变窄,当车速为40 km/h时,视野范围为90~100°,可满足司机在单线隧道内的视线夹角。不同隧道视距如图2、图3所示。

图2 矩形隧道司机视野

图3 圆形、马蹄形隧道司机视野
根据《城市轨道交通工程设计规范》(DB 11/995-2013),单线矩形隧道直线区段建筑限界如表1所示。曲线区段行车方向左侧建筑限界通常通过减小疏散平台宽度来满足要求,不再调整隧道的宽度,右侧建筑限界以直线隧道列车设备限界控制点为基础,通过测算偏移量进行加宽。

表1 单线矩形隧道直线区段建筑限界 mm
单线圆形隧道建筑限界直径宜为5 200 mm,马蹄形隧道建筑限界需结合地质条件、管线设备布置位置确定,曲线区段均通过隧道中心向线路中心线内侧偏移的方法代替隧道加宽。
根据《地铁设计规范》(GB 50107-2013)中加宽、偏移算法,测算不同隧道建筑结构曲线内侧建筑限界宽度。
单线矩形隧道曲线区段司机视距:
式(2)~式(5)中,h为轨道超高值,mm;s为滚动圆间距,mm,取值1 500 mm;(YK,ZK)为列车设备限界各控制点坐标值,mm;Ymax为列车设备限界控制点横坐标最大值,mm;WR为行车右侧限界至线路中心线距离,mm;ΔBi为曲线隧道内侧加宽值,mm;S为司机视距,m;R为区段曲线半径,m。
单线圆形、马蹄形隧道曲线区段司机视距:
式(6)中,d为隧道中线水平移动量,mm;h0为区段曲线半径,m。
3.2.2 计算实例
按照北京地铁15号线车辆设备限界、隧道建筑限界,列车设备限界控制点坐标如表2所示,矩形隧道行车方向右侧隧道宽2 100 mm,圆形隧道直径5 200 mm。为便于分析,R取困难地段最小值250 m,h取最大值120 mm,h0取隧道半径,设司机处于列车司机室中点位置,代入公式(2)~(8)。

表2 设备限界控制点坐标值 mm

表3 电话闭塞法故障区段各流程用时及延误 min
计算得出,矩形最小曲线半径隧道视距为68.49 m,圆形最小曲线半径隧道视距为72.11 m。由计算结果可知,15号线曲线区段可视距离大于列车最小安全间隔,适用RM模式行车。
当出现可视距离不满足列车最小安全间隔的曲线区段时,为保证运营安全,按照道岔防护模式,在驶入该曲线区段前停车,确认前方无停止列车后通过。
4 延误时间的计算
分析2种行车组织模式相较于图定运行时刻的延误,能够直观反映线路阻塞程度和通行服务能力。
4.1 计算方式
故障区段示意如图4所示。
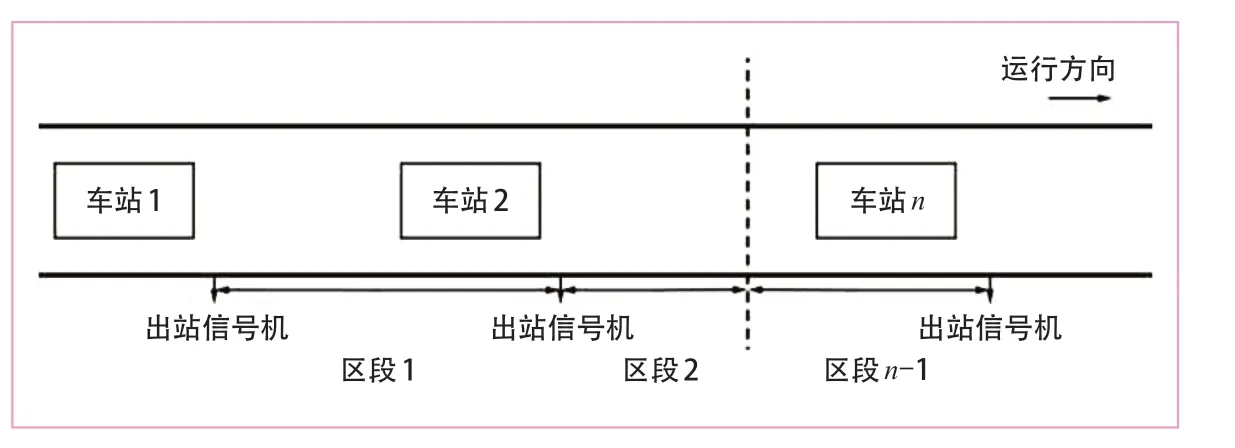
图4 故障区段示意图
相较列车在车站x的图定发出时刻,执行电话闭塞法或RM行车法后,列车通过故障区段的延误分为列车到达故障区段时延误、运行延误及站停延误,相应的计算公式有:
式(9)~式(12)中,Dsum为列车通过故障区段总延误,s;Darr为列车到达故障区段时的延误,s;Drun为列车在故障区段的运行延误,s;Dstop为列车在故障区段的站停延误,s;n为自运行方向起,故障区段内车站编号;tn,I、tn,L、tn,S为列车在第n站实际到达、发车、站停时间,s;Tn,I、Tn,L、Tn,S为列车在第n站图定到达、发车、站停时间,s;tn-1,R为列车在第n- 1区段实际运行时间,s;Tn-1,R为列车在第n- 1区段图定运行时间,s。
4.2 算例验证
选取北京地铁15号线下行石门至花梨坎(站间平均长度3.55 km),崔各庄至望京西(站间平均长度1.90 km)2区段,区段示意如图5、图6所示,模拟计算列车出清故障区段延误和后续列车间隔。
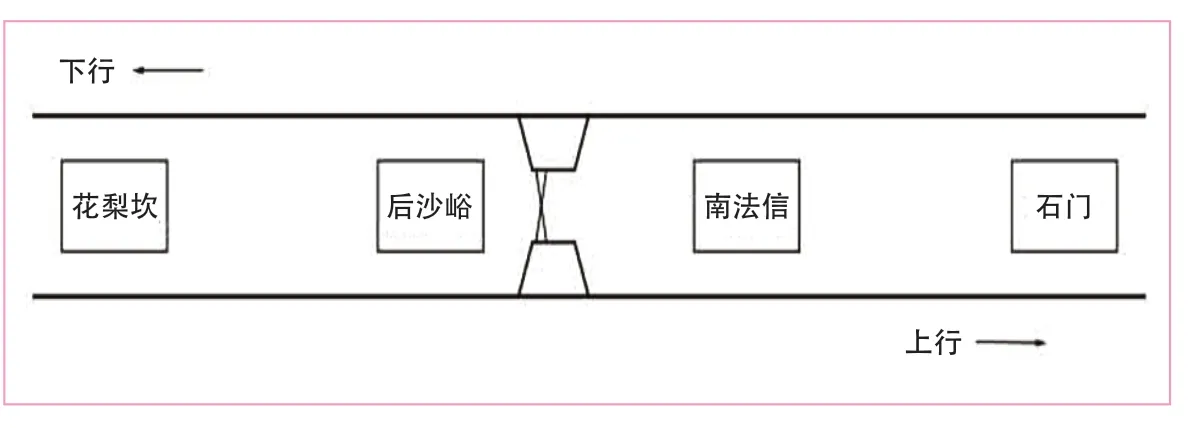
图5 石门-花梨坎区段示意图
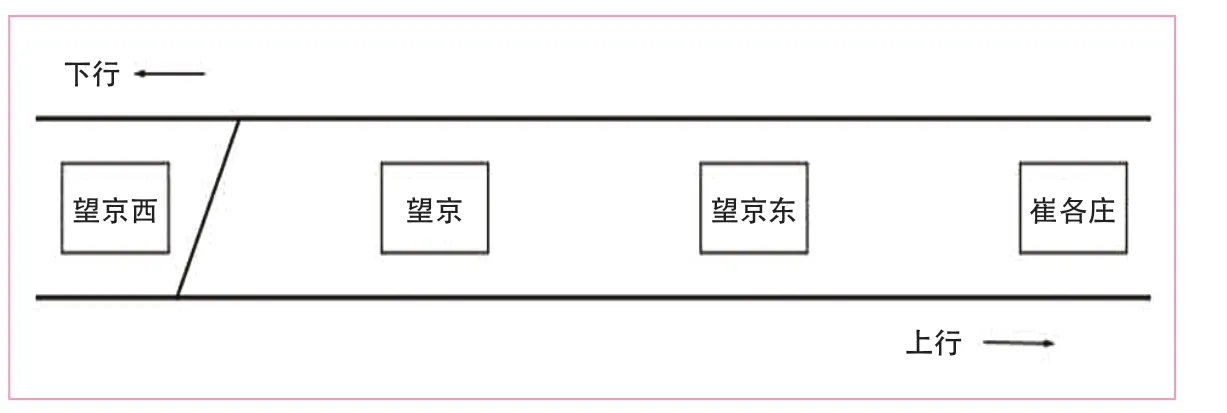
图6 崔各庄-望京西区段示意图
为便于计算,将人工作业延误设为定值,具体数值如下:
(1)两站一区段行车调度从确认、调整列车位置到完成电话闭塞发令延误时长为6 min,故障影响每增加一区段,发令延误时长则增加1 min;
(2)行车调度从确认故障范围到完成发布RM行车发令延误时长为1 min;
(3)车站综控员能够在列车站停时间内完成接发车流程,人工接发车作业延误为0;
(4)电话闭塞法和RM行车法区间最大运行速度分别为45 km/h、20 km/h。
如图7所示,设信号系统故障突发时列车2在望京站/后沙峪站,故障前各次列车均无延误,区间防护信号机故障。
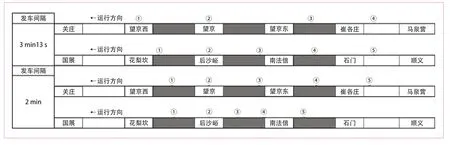
图7 故障突发时各次列车位置示意图
以2 min运营间隔,崔各庄至望京西、四站三区段故障为例,按照延误计算公式,各次列车运行过程如表 3、表4所示。

表4 RM行车法故障区段各流程用时及延误 min
按照同样模拟方式计算,代入2 min运行间隔和15号线运营图TS2004、列车最小间隔3 min13 s,分别模拟两站一区段、三站两区段、四站三区段故障,采用不同行车组织方式,延误如表5、表6所示。

表5 运行间隔3 min13 s时各次列车延误分析 min
4.3 时间延误分析
分析延误时间可知:
(1)RM行车法无需行车调度确认列车位置,响应时间快,首辆列车驶出故障区段延误小;
(2)电话闭塞法发令时间长,后续列车因需等待前方列车出清,会持续增加延误时间,若发生行车调度无法快速确认列车位置,或车站人工作业无法在图定站停时间内完成等情况,延误将进一步扩大;
(3)RM行车法对运行间隔小于5 min、故障区段平均间隔小于3 km的区段延误减缓明显,且运行间隔越短,延误减缓效果越大;
(4)对于长、大区段故障,RM行车法因限速较低导致效果不明显,故障长时间持续时,行车调度将采取抽车、故障区段前折返等方式,延长故障区段发车间隔,使RM模式行车通行效率降低,迫停列车可按照RM模式运行至前方站,到站列车改按电话闭塞法组织行车。
5 结语
在信息系统故障情况下,RM行车法能够避免行车调度确认列车位置耗时,维持列车运行,缓解乘客情绪,并有效降低运行延误。在实施应用阶段,一方面,要研判线路曲线半径、车辆技术参数、道岔位置等边界条件。另一方面,要针对行车调度发令、车辆操纵、手信号要求等各项作业环节风险进行辨识管控。与此同时,RM模式行车法主要基于车载ATP系统和人工控制方式进行运行,缺少技术防范措施。结合智慧地铁发展模式,未来可融合司机行为感知监测、地铁导航辅助等先进系统,通过采用监测感知、人工智能、无线传输网络、运行信息辅助等技术,实现运行中列车状态的在线监测、预警提示、处置决策支持和人工远程支援等功能,从源头降低安全风险。
