基于PLC的皮带机集控系统开发设计
2023-09-20张雅洁
摘 要:本文以蒲县蛤蟆沟煤业有限责任公司某矿为研究对象,开发设计了一套以西门子smart系列PLC为核心的皮带机集中控制系统,对全矿皮带机进行集中控制,全面实现蛤蟆沟煤矿皮带机智能控制,达到了降低事故率、提升生产效率、增加效益的目的。
关键词:Smart PLC;皮带机;集中控制系统
中图分类号:TP277
在生产领域,企业的生产效益和成本控制取决于生产经营管理的高效性、实时性、安全性。皮带机运输系统作为煤矿的生产主力军,其管理和调度也应向着智能化、信息化、集中控制的方向发展,因此集控制、保护于一体的远程调度系统应运而生。目前许多现代化的矿井都已经建成了此类系统,并取得了丰硕的直接和间接效益。
本文以蒲县蛤蟆沟煤业有限责任公司某矿为研究对象,开发设计以西门子smart系列PLC为核心的皮带机集中控制系统,该系统控制技术先进、合理、性能稳定可靠,扩展灵活,能够融合原有的集控系统,全面实现蛤蟆沟煤矿皮带机集中智能控制。
1 皮带机概述
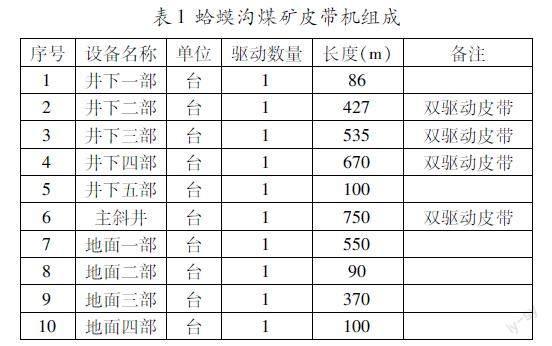
蛤蟆沟煤矿皮带机生产系统由地面4条皮带机、井下5条皮带机和1条主斜井皮带机组成,具体如表1所示:
2 系统设计
2.1 自动控制系统
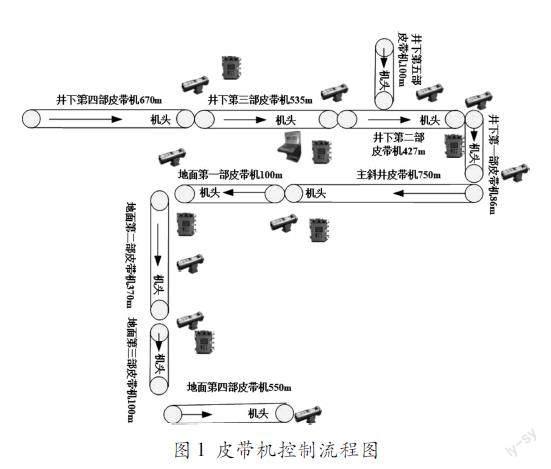
在每部皮带机机头安装使用一台控制箱,实现对井下所有皮带机的数据采集与集中控制。系统可以实现单机控制、检修控制及手动控制,具备就地及远程切换选择,并可显示系统内设备状态及参数。皮带机控制流程如图1所示。
2.2 视频监视系统
地面设备主要由组态运行上位软件组成,在现场对每条皮带机机头及刮板机安装摄像头,并通过光纤上传到集控室,可以实时监视及回放各皮带机视频监视点的情况。
3 系统方案
本控制系统设定了三种控制模式:集控自动顺序、集控手动单机及就地单机控制。其中集控自动顺序控制为系统的首选默认模式。工作时,可自由转换三种模式,不会影响系统的整体运行状态。
3.1 集控操作模式,可分为“手动”及“自动”两种
(1)“手动”模式:通过计算机,结合上位机界面,对单机设备进行起停控制。根据现场需要,可自行设定或取消设备之间的联锁保护关系。
(2)“自动”模式:根据现场需求,先选定工艺流程,再完成设备的自动起、停控制。自动模式下,一般都具备联锁保护,若在短时间内需要单独停止某一设备的运行,可自行取消联锁保护。[1]
3.2 现场单机操作
现场安装一台本安型操作台,完成单机设备的启动、停止控制,用于现场单机调试、维护使用。
3.3 现场停止
停止控制设定为紧急停止,用于设备发生异常时,确保生产安全。即当设备正在运行中,按下停止按钮,该设备立刻停止,待故障排查后,再恢复运行状态。
3.4 流程选择
根据现场的需求,自行选定合适的生产工艺,也可及时进行工艺流程变更。
3.5 启动功能
该功能仅在“自动”控制方式实现,先根据现场工艺流程选定顺煤流或逆煤流方向,再按顺序启动各设备,按顺序启动延时时间可以提前设定好。启动时,若优先启动的设备发生故障,则启动过程暂停,并发出报警。排除故障后,再由现场操作人员决定是否结束启动。
3.6 停止功能
该功能仅为组态功能,在“自动”控制方式实现,包括三种模式。
常规模式:在周期工作完成后,停止流程。
故障模式:当现场发生故障,在进行检测、保护装置动作时,设备立即停止运行,其后级设备经延时(延时时间可自行设定),待带式输送机上的煤運完以后,依次停止运行,防止重载启动。
紧急模式:现场出现意外或紧急情况时,按下组态画面上的紧急停止按钮,所有设备立即停止运行。[2]
3.7 预告功能
该功能仅在“集控—自动”控制方式实现,预告信号采用声光报警装置,并可持续10~30秒钟(可调)。启车信号发出前,在生产系统沿线发送信号,沿线人员听到后安全撤离,沿线设备方再按预设流程依次启动。
3.8 保护及故障报警功能
故障报警功能包括启车、停车以及传感器监测点报警。报警信号显示分为上位机界面及现场声光报警,同时为避免故障范围扩大,系统还可以根据报警级别自动做出对应的停车处理,并及时保存、打印故障报表。
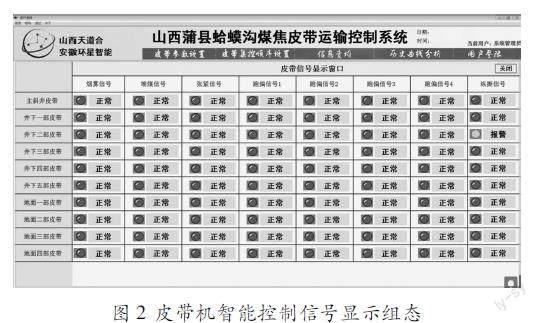
3.9 数据采集、处理及显示功能
本系统采用PLC及PROFIBUS总线通信网络,实时采集现场数据,包括设备启停时间、故障状态、工艺流程、运行状态及显示参数。使用组态王软件进行触摸屏界面设计,显示画面包括运行系统监控、皮带各项参数(报警、极限值等)设置、集控顺序设置、信号显示、报表查询等。
4 系统配置
4.1 地面集控室
地面集控室安装集控软件,用以实现地面计算机的人机交互界面平台。
正常运行工作时,操作员既可选择预定义的皮带机工艺流程自动控制,也可选择自定义流程的手动控制,屏幕上会实时显示选择后的流程;发生异常情况时,操作员可及时对被控设备进行远程操作。
在机房安装一台网络硬盘录像机,用于视频存储及回放,操作员可以通过操作员站实时监视皮带机运行情况,同时也可以回放以前监视画面。
4.2 矿用隔爆兼本质安全型PLC控制箱
矿用隔爆兼本质安全型PLC控制箱是集控系统的控制核心,用于实现系统传输信息、控制设备、采集数据等功能,采用西门子PLC、A/D(D/A)转换模块、开关电源、各类继电器等元器件。操作台根据用户的需求开发出编制程序,最终将结果输出到被控设备中。
4.3 皮帶机保护传感器
控制柜中接入各类传感器,包括烟雾传感器、温度传感器、速度传感器、压力传感器、煤位传感器、纵撕保护等。设备运行中,若发生故障使传感器被触发,则上位机组态画面会及时显示并发出报警信号。
4.3.1 烟雾保护
设备运行时若皮带打滑,易发生摩擦着火,从而产生烟雾,触发安装在各驱动部下风向处的烟雾传感器动作,设备立即停车。
4.3.2 温度保护
实时监测各皮带滚筒、减速器轴承温度,具有温度曲线查询和温度报表查询功能。
4.3.3 打滑保护
在实际运行中,由于多种原因,当皮带的速度与主滚筒转速产生差值,就会发生打滑现象。将检测皮带的实时速度及加速度的传感器接入PLC,将实际反馈值与整定值进行比较,判断是否输出打滑信号。
4.3.4 纵撕保护
当皮带机在卸煤过程中,有大块的锋利的尖状矸石落下时,容易发生纵向撕裂,因此纵撕保护通常都安装于输煤系统的落煤处。本系统采用矿用本安型撕裂传感器,当检测到撕裂时触发动作,皮带机立即停车并发出报警。
4.3.5 堆煤保护
堆煤保护是指在输煤过程中,当较大煤块堆积在皮带机机头时,皮带机能够自动停机。煤位传感器通常吊挂在皮带机头,当煤的高度超出标准范围时,传感器动作,皮带机自动停车并及时报警。
4.3.6 跑偏保护
皮带跑偏是煤矿皮带机在运行过程中较为常见的故障现象。将跑偏传感器固定安装在皮带机前后两端支架上,当皮带在运行发生跑偏时,传感器的滚轮偏转到规定角度外时,触发开关接点从而发出报警,并使皮带机立即停车。
4.3.7 拉线急停保护
拉线急停开关是煤矿带式皮带机沿线的紧急停止装置,当输送带出现跑偏、打滑、撕裂等情况时,工作人员能够及时拉动急停装置的钢丝绳,使皮带机停止工作。[3]本系统采用矿用本安型智能拉线开关,分别进入PLC系统和控制回路,一旦拉线开关发生动作,系统会立即发出报警并紧急停车。
4.3.8 张紧力保护
本系统采用矿用本安型张力传感器,检测输送机皮带张紧力,当皮带张紧程度超限时,将自动开启张紧绞车进行调整。
5 结论
该系统遵循的设计原则要求控制系统技术先进、合理、性能稳定可靠,扩展灵活,能够融合原有的集控系统。蛤蟆沟煤矿通过应用该系统,搭建了专用传输平台、数据平台和监控平台,大大提高了安全系数,实现了数据共享、报警联动功能,既保障职工人身安全,又减少由于矿井灾难所造成的损失。通过煤矿管控一体化,提高了煤矿的安全生产管理调度水平,从而全面实现了蛤蟆沟煤矿皮带机集中智能控制。
参考文献:
[1]王国富,王胜杰.浅谈西门子300PLC选煤厂集中控制系统[J].科技与企业,20150821.
[2]任杰,肖卫雄.选煤厂自动化集成平台的设计[J].工矿自动化,20101214.
[3]张晋锋.矿用带式输送机拉线急停开关故障及处理[J].机械管理开发,20200916.
[4]刘鹏涛.PLC在矿山机电自动控制中的应用[J].中国化工贸易,2019(04):110112.
[5]陈军君.PLC在煤矿皮带机监控系统中的应用[J].能源与节能,2019(05):151171.
基金项目:安徽水利水电职业技术学院2021年度高校科学研究项目(XJKJ202104)
作者简介:张雅洁(1983— ),女,汉族,安徽合肥人,硕士,讲师,研究方向:控制理论与控制工程。
