基于道路限速策略的规划路网噪声控制*
2023-09-20闫啸林李巧茹郝恩强武泽宇王少航
闫啸林 李巧茹 郝恩强 武泽宇 王少航
(1 河北工业大学土木与交通学院 天津 300401)
(2 天津市道路运输事业发展服务中心 天津 300192)
(3 天津市公路工程设计研究院有限公司 天津 300201)
0 引言
随着城市的快速发展,环境噪声问题日益显著。据2021中国环境噪声污染防治报告[1],全国城市昼间区域声环境受交通噪声影响比例达21.7%,城市居民长期处于交通噪声污染的危害当中。鉴于此,设置声屏障或隔离带、实行车辆限行管理、合理分配交通干道车流量等措施经常被用来减轻道路交通噪声污染。而规划路网限速控制策略由于其预防性噪声控制的特性引起了广泛关注。
长期以来,学者们研究道路限速主要聚焦于安全问题[2-3]。Aarts等[4]验证了道路限速和交通事故发生率之间的关系。聂进等[5]研究了道路限速和行人自行车的安全关系,发现降低车辆行驶速度可以明显降低行人和自行车骑车人伤亡风险。同时,道路限速也会带来路网效率的变化[6]。Lave等[7]发现限速可以影响整个路网的交通流分布,并可能减少出行时间。近年来,随着环境问题日益受到重视,不少学者开始研究道路限速与环境污染之间的联系[8-9]。Madireddy等[10]的案例研究表明,如果将住宅区的速度限制从50 km/h 降低到30 km/h,CO2和氮氧化物排放将减少约25%。但是,结合道路限速与噪声污染的研究很少。同时,路网规划阶段决定了路网流量分配,在路网规划阶段中,考虑道路限速策略,可以从系统整体说明限速的影响[11]。Yang等[12]从网络层面研究特定路段限速重新分配交通流的方法及系统表现,描述了道路限速阻抗函数的形式。Wang[13]研究了速度限制对路网效率的影响,发现采取道路限速后,总出行时间可能减少或增加,不同起讫点(Origin-destination,OD)对的道路使用者的出行时间变化趋势不同。帅斌等[14]研究了限速条件下多模式交通网络中的分类问题,得到了限速有使交通量从私人交通向公共交通转移的作用。王丹丽等[15]研究了道路上下限速时,用户均衡状态的改变以及系统总时间和总污染排放的变化。
综上,现有研究没有从路网规划角度,考虑道路限速策略带来的区域噪声和系统整体的变化情况。因此,本文通过建立基于道路限速的随机用户均衡模型,对路网进行交通分配,研究规划阶段道路限速策略控制噪声的规律,为采取道路限速策略进行噪声控制提供有效参考。
1 基于道路限速的随机用户均衡模型
为在路网规划阶段研究道路限速策略下噪声的变化规律,需要在分配过程中模拟出道路限速约束下的交通控制策略。随机用户均衡模型作为交通分配的主要应用模型,根据出行分布情况及道路阻抗函数的设置对出行者的出行情况进行预测,从而得到路网中交通量的分布,然后结合噪声预测模型对噪声进行模拟计算。本文对Fisk随机用户均衡模型[16]添加道路限速约束,建立基于道路限速的随机用户均衡模型。
1.1 道路限速约束条件下的阻抗函数
道路阻抗函数反映道路上行程时间与交通负荷之间的关系,决定交通分配中的路径选择。道路限速策略分两种情况:当车辆行驶速度高于限制速度时,需减至限制速度;当车辆行驶速度小于限制速度时,车辆沿原速度行驶。根据速度、时间与流量的关系,阻抗函数以流量作为自变量,故使用临界流量代替限制速度描述阻抗函数。本文基于美国联邦公路局(Bureau of public road,BPR)函数[17]建立限速约束下道路阻抗函数。鉴于限速条件在用户均衡下的存在性和路段阻抗的唯一性[14,18],限速控制下的阻抗函数可以表现为
式(1)中:f(qa)为路段a上的行驶时间,h;t0为车辆以自由流速度运行在路段a上时的行驶时间,h;qa为路段a的实际交通量,pcu/h;ca为路段a的实用通行能力,pcu/h;α、β为标定参数,α=0.15,β=4。为车辆在限制速度下在路段a的出行时间,计算方式如下:
式(2)中:la为道路a的长度,m;~va为路段a在限速控制下的限制速度,km/h。
1.2 基于道路限速的随机用户均衡模型
在进行交通分配的过程中,确定性用户均衡模型假设出行者完全掌握其他出行者的出行信息。由于上述假设在实际出行过程中过于理想,因此本文采用随机用户均衡模型进行交通分配,该模型更能反映交通流的实际运行情况[19]。本文基于Fisk 随机用户均衡模型,改进阻抗函数的BPR函数模式为道路限速条件下的约束阻抗函数模式,构造基于道路限速的随机用户均衡模型,如下:
1.3 模型准确性分析
应用Python 软件对Fisk 随机用户均衡模型及所建模型进行编程,并利用相继平均算法(Method of successive algorithm,MSA)[20]进行求解。以图1为例(相关参数在2.1节中详述),选取其中局部道路研究模型的准确性,计算结果如表1所示。

图1 路网规划图及噪声控制区域Fig.1 Planned road network and noise control area
由表1可得,无限速条件下,基于道路限速的随机用户均衡模型计算结果与Fisk 的随机用户均衡模型结果相同,证明所建模型模拟结果的准确性;限速条件下,对道路13采取限制速度为30 km/h的限速策略,结果表明限速后道路13及其路径上所建模型模拟流量小于传统模型模拟流量,其他路径所建模型模拟流量大于传统模型模拟流量,符合道路限速策略施行前后的流量变化规律。因此,该模型可以反映出道路限速的变化情况。
2 案例研究
为在路网规划阶段研究道路限速策略控制噪声的规律,本文以某城市规划路网作为研究对象。通过调整不同的道路限速策略,使用所建模型进行交通分配,研究控制区域和整体路网的变化规律。
2.1 研究区域及指标设置
图1 为某城市局部规划路网,该规划区域包含主干路、次干路和支路3 种等级的道路。路网内共21个节点,34 条路段。并根据规划用地类型及道路影响情况划分出不同控制区域。其中路段属性表示方法为:路段编号、路段长度/m、道路结构编号。
主干路、次干路、支路3 级道路相关参数如表2所示。

表2 道路结构及其编号Table 2 Road structure and numbering
以噪声控制点描述区域噪声,其噪声影响道路与接收点距离如表3所示。

表3 噪声控制点选取Table 3 Noise control point selection
研究采用国家标准JTGB03-2006 中交通噪声预测模型为基础模型,如式(4)所示。
式(4)中:Leq为车流在接收点处的等效声级,dB;L0为车流参照点处的平均辐射噪声级,dB;q为该段道路的实际交通量,pcu/h;V为该段道路上车辆的平均出行速度,km/h;r0为参考点至等效行车线距离,m;r为接收点距等效行车线的距离,m;T为计算时间,h,一般取T=1;α为与地面相关的吸收因子,一般取α=0.5。
为描述路网车辆出行变化情况,定义概念绕行系数如式(5)所示:
式(5)中:R为绕行系数;R0为无控制策略下,路网中所有车辆出行距离之和;R′为当前道路限速策略下,路网中所有车辆出行距离之和。
2.2 讨论与分析
应用Python 对所建模型进行编程,并采用MSA算法对模型进行求解,研究道路限速策略控制噪声的规律。
2.2.1 无控制策略下交通分配结果
在无限速控制条件下,应用所建模型进行路网交通分配,其结果如图2 所示。用来作为道路限速策略下噪声控制研究的对照组。
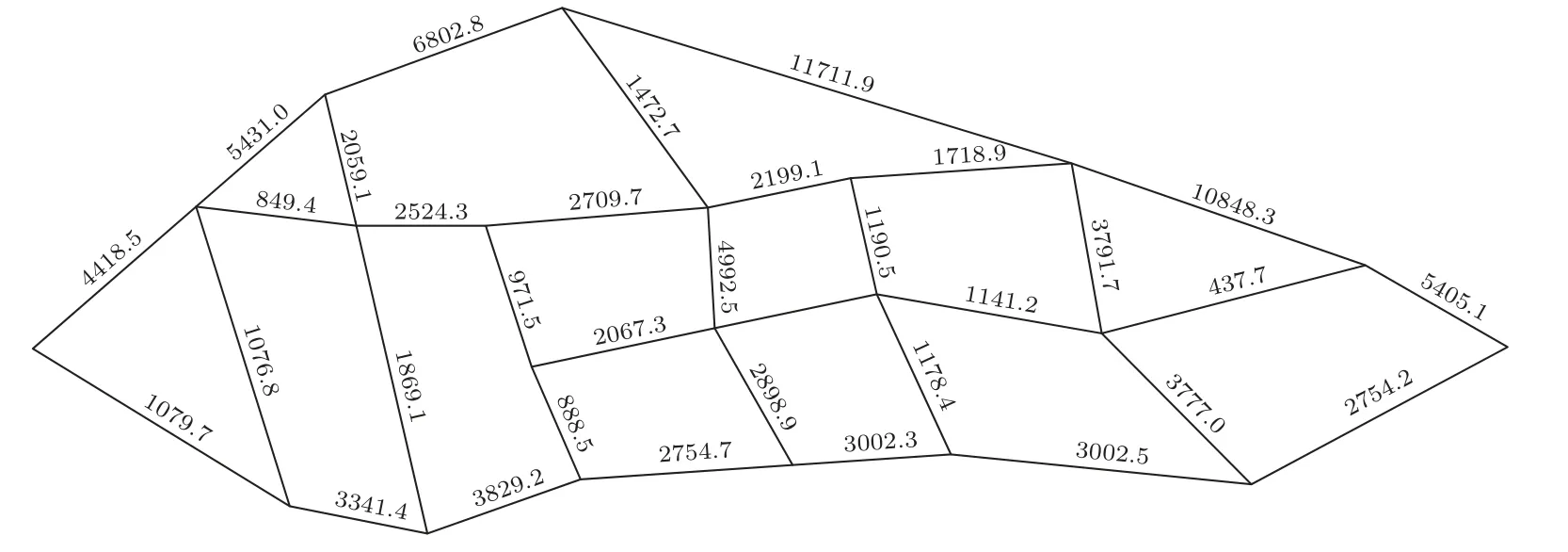
图2 无控制下路网流量分配结果Fig.2 Without control,the flow distribution results of the road network
2.2.2 噪声控制点限速控制道路选择
本文以点A为例研究道路限速策略中控制道路选择与噪声控制的关系。对路网所有道路分别采取降低道路设计速度20 km/h 的限速控制,得到各条道路限速控制后点A的噪声控制效果如表4所示。
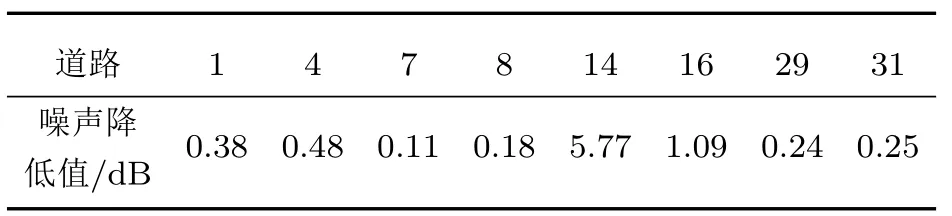
表4 有效控制道路及控制效果Table 4 Effective control of road and control effect
据表4 知,控制道路14 (即点A影响道路)的控制效果最佳,可降低噪声值5.77 dB。控制与点A相接的道路16,控制效果次之,可降低噪声值1.09 dB,但其控制效果仅为最佳方案的18.89%。因此,应选择控制区域影响道路作为控制对象。
研究同时控制多条道路对噪声控制的影响,首先对点A影响道路14 进行30 km/h 的限速控制,再对控制效果次优的道路16 进行限速控制(以1 km/h 为步长,道路16限制速度由50 km/h 降至20 km/h),应用所建模型进行分配,得到点A噪声降低情况及路网总出行时间变化情况如图3所示。
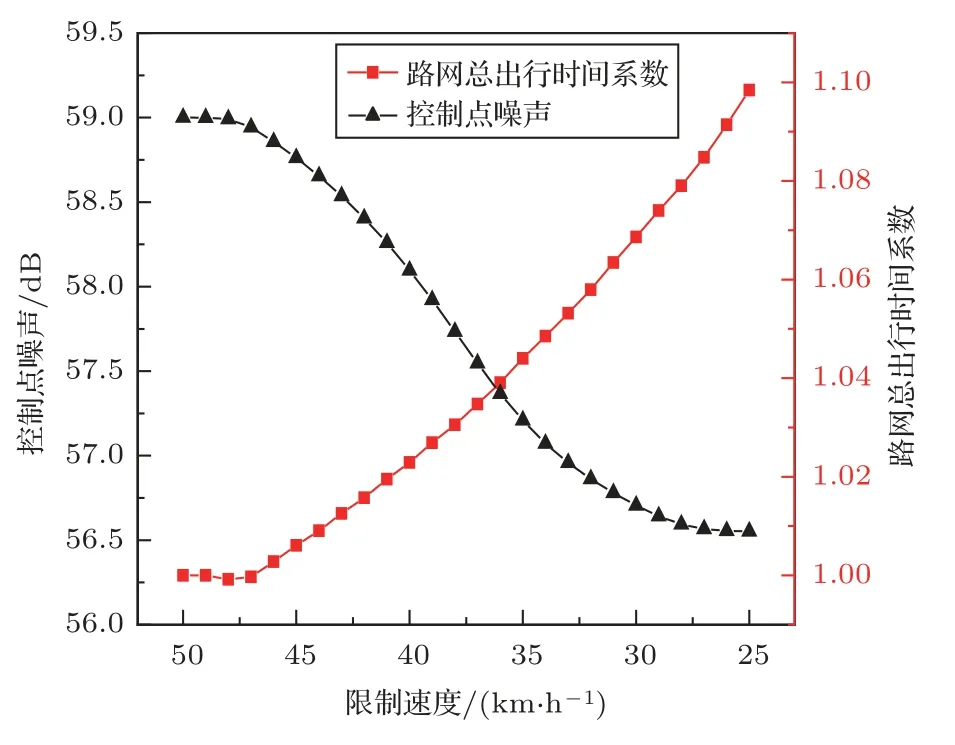
图3 同时控制道路14 和16 下噪声与路网总出行时间变化Fig.3 In the case of simultaneous road 14 and road 16,control point noise and road network total travel time variation with limited speed
据图3 知,同时控制道路14 和道路16 后,该点噪声值进一步降低2.50 dB。然而路网总出行时间增加10%,极大降低路网运行效率。因此,采用道路限速策略控制噪声,应控制该区域的噪声影响道路,当控制单一道路难以完成控制任务时,可以考虑控制该区域的相接道路,但是需要注意路网总体运行效率的变化。
2.2.3 限速控制下区域噪声与路网整体出行时间变化
研究限速控制下区域噪声与路网整体出行时间变化的规律。应用2.2.2 节研究得到的控制策略,对各点影响道路进行限速控制,控制方案为:以1 km/h为步长,限制速度由设计速度控制到设计速度的50%,应用所建模型进行交通分配。得到控制点噪声和总出行时间系数随着限速控制程度变化的趋势图,如图4所示。
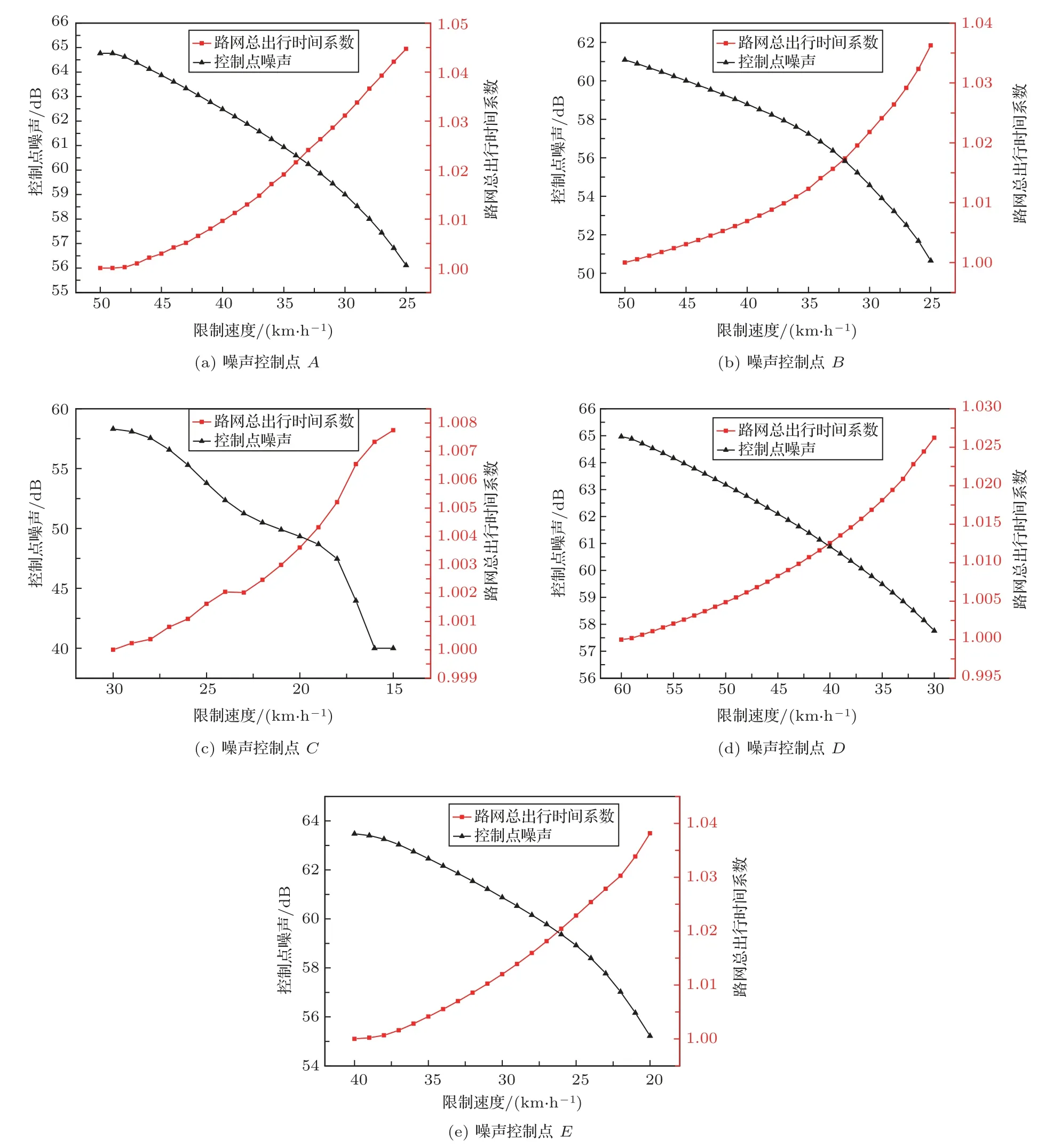
图4 控制点噪声-路网总出行时间随限制速度变化Fig.4 Control point noise and road network total travel time variation with limited speed
各点限制速度为设计速度80%时的控制结果如表5 所示。结果表明,限速控制平均降低区域噪声2.94 dB,采用道路限速策略可以有效降低控制区域的噪声,且限制速度越低,降低噪声效果越明显;对路网总体而言,限速控制平均增加路网总出行时间0.66%,路网总出行时间随着限制速度的降低而增加。

表5 噪声控制点控制结果Table 5 Results of noise control point
研究发现,各区域的噪声变化趋势和路网总出行时间变化趋势相似,对两者进行相关分析,得到各噪声控制点的噪声-路网总出行时间系数相关系数如表6所示。

表6 控制点噪声-路网总出行时间相关系数表Table 6 The correlation coefficient between the control point noise and road network total travel time
分析可得各控制点噪声与总出行时间系数均存在线性关系。以点A为例,其控制点噪声LeqA与路网总出行时间系数ta的拟合关系式为
为研究道路限速策略下,路网各条道路的变化情况,采用交通饱和度即道路实际流量与最大通行能力的比值(简称VC比),并通过计算得到VC比差值以描述道路服务水平变化情况,噪声差值以描述道路噪声变化情况,结果如图5所示。
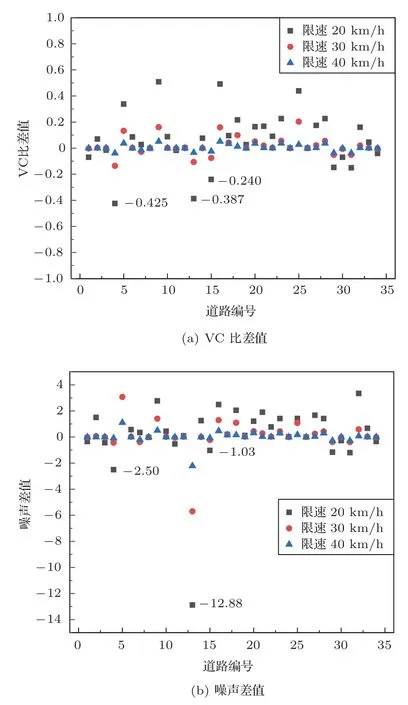
图5 不同限速条件下VC 比差值和噪声差值散点图Fig.5 VC ratio difference and noise difference with limited speed
通过对比图5(a)和图5(b),发现道路4、道路13、道路15 均存在VC 比大幅降低的情况,但道路13 的噪声差值远远大于道路4 及道路15 的噪声差值,其具体变化数值如表7所示。
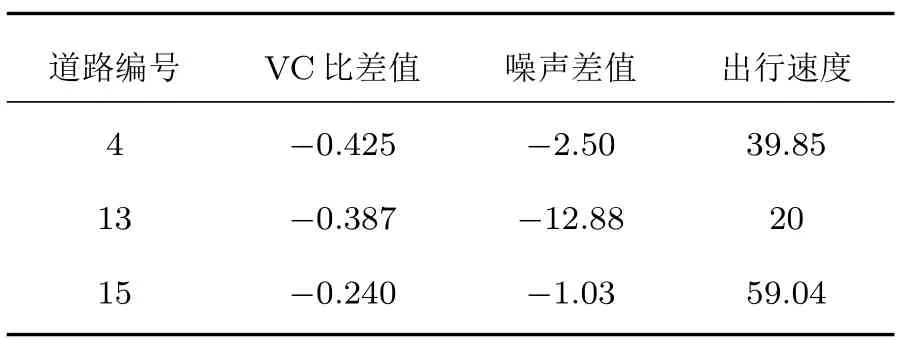
表7 限速条件20 km/h 下,道路数值变化Table 7 The variation of road characteristics under the speed limit of 20 km/h
由表7 知,造成道路13 噪声差值远大于道路4 和道路15 噪声差值的原因在于出行速度的不同。假设限速控制仅影响道路车辆出行速度,道路流量不发生变化,则道路13 的速度为20 km/h,道路流量6802.81 pcu/h,据式(4),得到点A噪声值为55.55 dB,降低噪声值为9.16 dB,降低效果为假设前的71.12%。因此,道路限速策略降低路段噪声的主要因素为对于路段车辆出行速度的限制。
2.2.4 限速控制下控制区域噪声与路网排放总声压级变化
研究限速控制下控制区域噪声与路网排放总声压级的变化规律,限速控制方案同2.2.3 节,控制点噪声与路网排放总声压级变化如图6 所示。结果表明,路网排放总声压级在区域A、B、D和E均随着限制速度的减小呈减小趋势,路网排放总声压级平均降低0.19 dB。

图6 控制点噪声-路网排放总声压级随限制速度变化Fig.6 Control point noise and road network noise emission total sound pressure level variation with limited speed
区域C的路网排放总声压级变化总体呈增加趋势,与其余控制区域的趋势相异。对区域C的路网排放总声压级与其他路网特征进行相关分析,得到表8。

表8 区域C 路网排放总声压级与其他路网特征相关系数Table 8 The correlation coefficient between the road network noise emission total sound pressure level and other network characteristics in region C
由表8 知,路网排放总声压级与路网总出行时间系数和绕行系数呈高度正相关,与绕行系数的相关程度最高,为0. 984371;路网排放总声压级与控制点噪声,出行速度和道路流量呈负相关关系。为研究路网排放总声压级在不同道路上采取限速策略时的变化情况,对路网所有道路进行独立的限速控制,控制方案同2.2.3 节,使用所建模型进行交通分配。得到各条道路的道路号,道路等级以及道路噪声与路网排放总声压级的相关系数如表9所示。
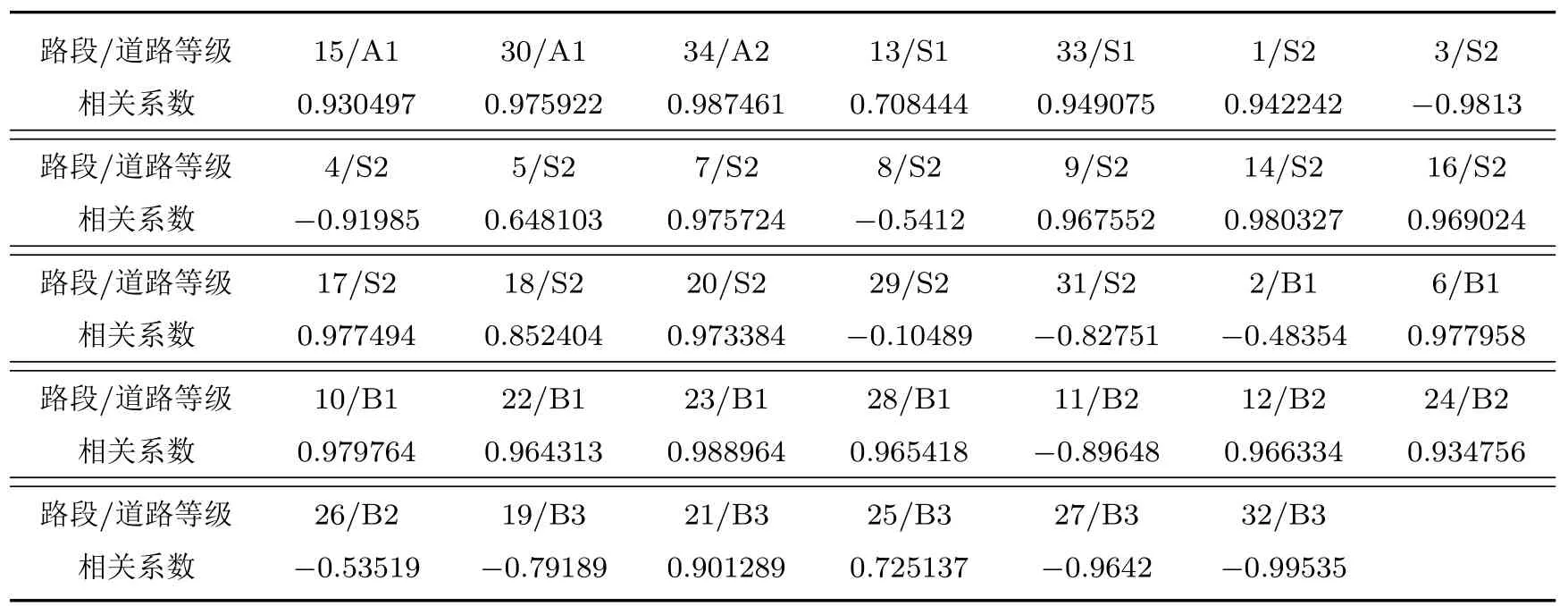
表9 各道路区域噪声与路网排放总声压级相关系数Table 9 The correlation coefficient between road area noise and the road network noise emission total sound pressure level
由表9 知,道路等级为A1、A2 和S1 的道路,控制点噪声和路网排放总声压级均呈高度正相关关系(即路网排放总声压级随着控制点噪声的降低而减小,亦随着道路限制速度的降低而减小)。道路等级为S2、B1,B2、B3 的道路均存在道路噪声值与路网排放总声压级呈负相关关系的道路变化情况(如控制区域C),对呈现负相关关系的道路进行路网排放总声压级与绕行系数的相关系数研究,得到表10。

表10 负相关关系道路上路网排放总声压级与绕行系数的相关系数Table 10 The correlation coefficient between the road network noise emission total sound pressure level and detour coefficient on negative correlation road
由表10 知,在负相关变化的道路上,路网排放总声压级与绕行系数存在高度正相关关系。可能的原因为绕行系数代表路网整体出行距离的增加,反映了车辆的绕行情况。当车辆绕行,使得其他道路噪声增加,导致路网排放总声压级增加。
3 结论
本文构建基于道路限速的随机用户均衡模型,通过模拟不同道路限速策略下的交通分配对区域噪声、路网总出行时间和路网总噪声排放情况进行分析,得到了道路限速控制噪声的规律,可以为规划者进行路网噪声控制提供相应的理论支持。
研究结果显示,施行道路限速策略控制区域噪声,限速设置为80%设计速度,平均降低区域噪声2.94 dB,同时增加路网出行时间0.66%。并得到以下结论:道路限速策略控制对象应选取该区域噪声影响道路,当控制单条道路难以满足控制要求时,可以对该区域相接道路进行控制;限速控制导致路网总出行时间的增加,且路网总出行时间与控制区域噪声呈线性关系;道路限速策略控制噪声的主要因素在于降低影响道路上出行车辆的出行速度。同时,路网总噪声排放在限速控制下,呈现两种不同变化趋势:一是随着高等级道路控制程度的增加,路网排放总声压级下降;二是针对很大比例的低等级道路,路网总噪声排放随控制程度的增加呈先减小或平稳趋势,后增加的趋势,且变化趋势与绕行系数高度相关。
规划者可以有效地采取道路限速策略控制噪声,而期间应平衡路网总体出行与噪声控制方案,以期达到交通环境最优效果。
