变稳直升机控制律设计与仿真验证
2023-09-20刘炎辉刘立彬王永红
刘炎辉,刘立彬,王永红
(1. 中国飞行试验研究院,陕西 西安 710089;2. 空军装备部驻西安第一军代表室,陕西 西安 710089)
1 引言
变稳直升机通常在成熟的原型机上加装一套特殊的电传飞控系统,通过变更飞控系统控制律参数使原型机呈现不同动态特性,并利用原型机机械操纵系统保证飞行安全。在成熟的平台上加装试验系统有利于控制试验变量及保证飞行安全,所以变稳直升机广泛应用于飞行品质研究与规范制定、新技术飞行验证、试飞员培训及无人直升机控制技术等领域,是支撑航空航天基础技术发展的载体[1,2]。国外利用变稳直升机开展了多项研究。德国宇航中心将轻型、双发、涵道尾桨的EC-135直升机改装成变稳直升机,推动了显模型控制、主动侧杆等技术的发展[3]。美国国家航空航天局将JUH-60A直升机改装为变稳直升机,完成了基于模型跟踪原理的全权限电传飞行控制系统演示验证[4-6]。而国内目前仅有中国飞行试验研究院先后研制成功了KW-1和IFSTA两型固定翼变稳机,在变稳直升机研制领域尚属空白。
变稳直升机研究的关键在于突破变稳控制律设计技术,与传统的直升机控制律不同,变稳直升机控制律需要在空中实时改变参数,并且使变稳直升机根据控制律参数的变化实现不同等级飞行品质改变。美国、德国、加拿大等国家均采用显模型跟踪控制律架构实现变稳控制功能,通过空中实时改变显模型跟踪控制律中指令模型参数及反馈参数实现不同等级飞行品质模拟功能,加拿大的BELL-205变稳直升机甚至通过一个Ipad实现变稳控制律参数的改变。而国内直升机显模型跟踪控制律尚未投入使用,更没有成熟的变稳控制律。本文将基于显模型跟踪控制律架构开展变稳直升机控制律研究。
研究思路如下:首先基于模型跟踪控制律在simulink中构建变稳控制律架构。其次基于NSGA-Ⅱ算法开展反馈控制器参数优化,优化过程中保持指令模型参数不变。最后进行控制律仿真,通过改变指令模型参数,可实现不同等级飞行品质的改变。
2 控制律架构
控制律架构采用显模型跟踪控制律架构(如图1所示),美国JUH-60A变稳直升机,德国EC-135变稳直升机均采用此种控制律架构。

图1 直升机显模型跟踪控制律架构
控制律架构主要由指令模型、原型机逆模型、原型机模型、等效时延、反馈控制器5部分组成。其中指令模型是被模拟飞行器动力学的数学表达式,通常可以采用一阶或二阶系统。原型机逆模型将指令模型输出的状态量转变为对应的桨距角输入到原型机模型中,可以降低高频跟踪误差。原型机模型是原型机平台的九阶线性小扰动方程。反馈控制器采用姿态角、角速率反馈降低低频跟踪误差。等效时延用来等效控制律前向通道的时间延迟。对指令模型和原型机逆模型进行简单介绍。
2.1 指令模型
指令模型是被模拟飞行器动力学的数学表达式,这个模型可以采用具有优良飞行品质的状态空间、传递函数等模型。本文中指令模型采用传递函数形式,其中俯仰通道、滚转通道、偏航通道的显模型是二阶线性模型,总距通道为一阶线性模型,四通道指令模型如式(1)~(4)所示[7]

(1)
(2)

(3)

(4)
对俯仰通道来说,θm为指令姿态角,We为纵向周期变距杆输入,ξ为阻尼比(默认值设定为0.7),ωn1为频率(默认值设定为3rad/s),C11为灵敏度系数(默认值设定为6°/cm)。其余通道类似。与传统模型跟踪控制律不同。在变稳直升机控制律中上述参数可以通过构型控制器在空中实时改变,从而使指令模型发生改变,实现不同等级飞行品质模拟。不同参数对飞行品质的影响见后文。
2.2 原型机模型
原型机模型采用0km/h,气压高度100m,正常重量某型直升机的9阶线性气动模型。
2.3 原型机逆模型
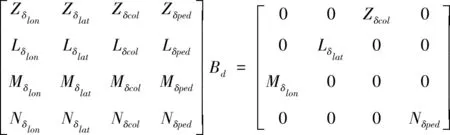
原型机逆模型可以根据指令模型输出的状态反算原型机平台对应的桨距角。其本质是原型机状态空间的”逆”。分别根据(解耦矩阵+原型机模型)的状态空间算出直升机四通道对应响应(w,p,q,r)和桨距角之间的传递函数,然后使用参数辨识将纵向、横向、航向通道降为二阶,总距通道降为一阶。解耦矩阵按式(5)确定。
(5)
式中,左边矩阵为B矩阵对应w,p,q,r的行被选出组成的方阵,解耦矩阵为Bd。将四通道输入与解耦矩阵进行相乘后可以降低操纵耦合。
将解耦后的状态空间转化为传递函数并采用参数辨识的方法进行降阶,滚转通道降阶后的二阶传递函数如式(6)~(7)所示,式中k0为-4.54,k1为-0.39,k2为-0.0004其余通道类似。

(6)

(7)
2.4 反馈控制器
模型跟踪控制律反馈控制器将直升机实际响应与指令模型输出的期望响应作差并通过PI控制器反馈至主通道。其具体结构及参数设置在下一节中介绍。
2.5 等效时延
3 控制律调参优化
当控制律架构搭建完成后,需要对反馈控制器进行参数优化从而完成显模型跟踪控制律的设计。
3.1 设计变量
优化过程中不改变显模型跟踪控制律架构及反馈控制器外的其它部分,设计变量为反馈控制器中的所有参数。纵、横、航、总距4通道共计17个参数。表1为优化参数列表。图2为滚转通道反馈控制器,图中红圈所标为滚转通道优化参数。

表1 优化参数列表

图2 滚转通道反馈控制器
3.2 优化目标
式(12)~(13)分别为时域优化目标与频域优化目标。
0.01745(∠Tcmd-∠Thost)2]
(8)

(9)
对于俯仰通道的优化而言,俯仰通道存在输入,其它通道无输入,上式计算结果对俯仰通道为跟踪性,对滚转通道、航向通道、总距通道为解耦性。
3.3 优化算法及结果
优化算法采用NSGA-Ⅱ优化算法,图3所示为俯仰角积分反馈系数优化时间历程。

图3 俯仰角积分反馈系数优化时间历程
图4所示为不同设计变量对姿态角跟踪性影响。Z轴值越低,该设计变量跟踪性越好。表2为俯仰通道优化结果。

表2 俯仰通道优化结果

图4 不同设计变量对姿态角跟踪性影响分析
优化结束后,以纵向通道为例,从跟踪性、解耦性2方面对显模型跟踪控制律进行验证。
3.3.1 跟踪性
跟踪性基于在一个规定时间内指令与实际测得响应之间误差的平均值计算,如式(10)所示计算结果为纵向通道跟踪性。图4所示为指令模型输出俯仰角与实际观测俯仰角对比。根据式(10)计算结果及图5来看,控制律跟踪性良好。

图5 指令模型输出俯仰角与实际观测俯仰角对比

(10)
3.3.2 解耦性
用类似跟踪性方法求解滚转角对纵向阶跃输入的解耦性,如式(11)所示。根据式计算结果及图6来看,控制律解耦性良好。

图6 指令模型输出滚转角与实际观测滚转角对比

图7 俯仰通道指令模型频率对系统带宽的影响

(11)
4 变稳直升机控制律仿真验证
完成控制律参数优化后,即完成显模型跟踪控制律设计,在此基础上,可以实现变稳功能。已知显模型跟踪控制律实际跟踪指令模型,因此通过改变指令模型参数就可以改变整个系统的响应特性,实现不同等级飞行品质模拟功能。已知各通道指令模型分别为一阶或二阶系统,如式(1)~(4)所示,改变对应参数就可以实现变稳功能。下面以俯仰通道为例进行验证。
4.1 带宽
完成控制律参数优化后,即完成显模型跟踪控制律设计,在此基础上,可以实现变稳功能。已知显模型跟踪控制律实际跟踪指令模型,因此通过改变指令模型参数就可以改变整个系统的响应特性,实现不同等级飞行品质模拟功能。已知各通道指令模型分别为一阶或二阶系统,如式(1)~(4)所示,改变对应参数就可以实现变稳功能。下面以俯仰通道为例进行验证。
4.2 阻尼比
通过改变俯仰通道指令模型中频率的大小,可以实现不同等级阻尼比的改变。当俯仰通道施加脉冲输入时,图8所示为指令模型阻尼比对系统阻尼比的影响。

图8 俯仰通道指令模型阻尼比对系统阻尼比的影响
4.3 姿态敏捷
通过改变俯仰通道指令模型中灵敏度系数及频率的大小,可以实现不同等级姿态敏捷的改变。当俯仰通道施加阶跃输入时,图9所示为指令模型频率对系统姿态敏捷的影响。
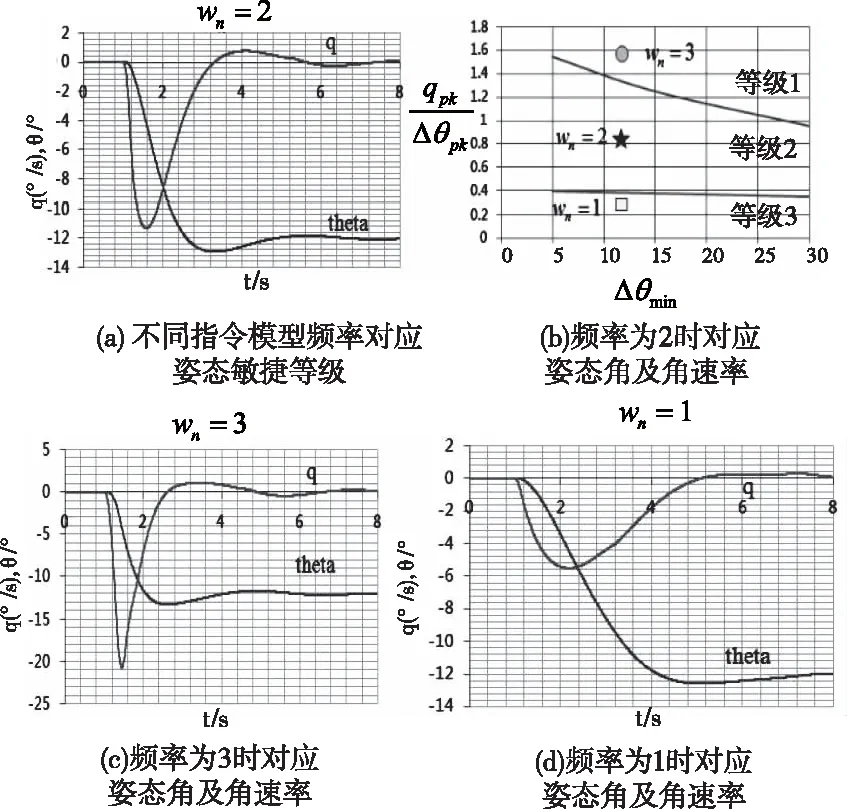
图9 俯仰通道指令模型频率对系统姿态敏捷的影响
4.4 总距偏航耦合
在指令模型中将总距输出引入航向通道,并通过改变增益调节总距-偏航耦合的大小。当总距通道施加阶跃输入时,图10所示为指令模型总距及航向通道间增益对系统总距-偏航耦合的影响。

图10 指令模型总距及航向通道间增益对系统总距-偏航耦合的影响
4.5 响应类型
通过将指令姿态变为指令速率可以实现ACAH响应类型到RCAH响应类型的转变。式(12)与式(13)分别对应ACAH响应类型指令模型与RCAH响应类型指令模型。

(12)

(13)
当俯仰通道施加阶跃输入时,图11所示为不同响应类型对阶跃输入的响应。

图11 不同响应类型对阶跃输入的响应
5 结束语
本文探索了变稳直升机控制律设计及仿真的流程,以显模型跟踪为控制律架构,第二代非劣遗传算法为优化方法从带宽、阻尼比、姿态敏捷、轴间耦合、响应类型等方面验证了常见任务下变稳直升机控制律,结果证明通过改变指令模型参数,可实现不同等级飞行品质的改变。
