蔬菜精量播种机关键部件设计与试验
2023-09-19秦圆圆
秦圆圆
(重庆化工职业学院,重庆 401220)
0 引言
随着人口增加和城市化进程的加速,蔬菜作为人们饮食中必不可少的营养来源,需求量也越来越大[1-2]。然而,传统的人工种植方式已经无法满足大规模生产的需求,农业机械化逐渐成为了现代农业生产的必然趋势。在蔬菜种植领域,蔬菜精量播种机作为一种重要农业机械化设备,能实现高效、精准种植,有效提高生产效率和质量[3]。因此,研究蔬菜精量播种机的关键部件设计显得尤为重要。
通过深入探究种子储存器、送料器、播种器、控制系统等关键部件的设计和制造过程,并进行田间试验和优化,可以为蔬菜种植技术的进一步发展提供有力支持,同时推动农业机械化生产的普及和推广。因此,本文重点研究蔬菜精量播种机的关键部件,为推进蔬菜种植领域的高效、精准生产提供参考和借鉴。
1 国内外蔬菜精量播种机研究现状
1.1 气力式蔬菜播种机
气力式蔬菜播种机是一种利用气流将种子输送到种植槽中,实现蔬菜种植的农业机械化设备。目前,气力式蔬菜播种机的研究和应用已经得到了广泛关注。
在气力输送方面,许多学者和研究人员对气力输送系统设计和优化进行了深入研究。通过对气流的控制、传输速度的调整、种子的大小和形状的匹配等手段,提高了气力输送系统的精度和效率,使播种的成功率得到了提高[4]。
在播种机的结构和控制系统方面,研究人员提出了新型气力式播种器结构,使种子可以更加均匀地分布在种植槽中,从而提高了播种精度和质量。同时,一些学者也对气力式播种机的控制系统进行了优化和改进,以提高机器的稳定性和可靠性[5]。
此外,还有一些学者对气力式播种机的应用进行了实践和验证。通过对不同种类蔬菜的播种试验,验证了气力式播种机在蔬菜种植中的可行性和优势,同时也探索了不同的播种参数和条件对播种效果的影响。
1.2 手扶式精量蔬菜播种机
手扶式蔬菜精量播种机是一种便携式、小型化的农业机械设备,适用于小面积蔬菜种植和家庭菜园种植。目前,手扶式蔬菜精量播种机的研究和应用也得到了广泛的关注和研究。
手扶式蔬菜精量播种机的结构设计相对简单,一般包括种子储存器、送料器、播种器、行走装置等组成部分。研究人员主要在种子储存器、播种器等部分进行了结构优化和改进,提高了机器的稳定性和精度,相关研究人员提出一种手扶式油菜精量穴播机,采用摇臂式送料器和活动式种植头,通过调整送料速度和种植头位置来实现种子的精准排种(图1)[6]。
在播种精度方面,手扶式蔬菜精量播种机主要通过改变送料器的开口大小、角度和形状等方式来实现种子的精准量控制和均匀分布。研究人员也在此方面进行了不少的研究和实践,通过实验验证了不同参数下播种机的播种精度和成功率[7]。
手扶式蔬菜精量播种机在植保和施肥等方面的应用也受到了一定程度的关注和研究。例如,在播种过程中同时进行植保和施肥等操作,能有效提高种植效率和产量。
1.3 电动式蔬菜精量播种机
随着农业机械自动化水平的提高和农业生产方式的转型,电动式蔬菜精量播种机作为一种新型农业机械设备,受到了越来越多的关注和研究。电动式蔬菜精量播种机相对于气力式和手扶式蔬菜播种机,在自动化程度、生产效率、播种精度等方面具有更大的优势。
在电动式蔬菜精量播种机的结构设计方面,主要采用带有电机驱动的送料器、种子储存器和播种器等组成部分。在电机控制方面,电动式蔬菜精量播种机一般采用单片机或PLC控制系统,通过编程来实现种子的精准控制和自动化操作[8]。
在播种精度方面,电动式蔬菜精量播种机一般采用电子秤、光电传感器等装置来对种子进行重量检测和流量控制,以实现种子的精准计量和均匀分布。此外,电动式蔬菜精量播种机还具有智能化控制和故障自诊断等功能,能提高生产效率和设备的稳定性。
电动式蔬菜精量播种机在节能环保方面也具有一定优势。采用电动驱动代替传统的气动驱动,不仅能降低能源消耗,减少环境污染[9],而且还能减少工作人员的劳动强度和生产成本。
2 蔬菜精量播种机总体设计
2.1 整体结构
蔬菜精量播种机的整体结构包括送料系统、种子储存系统、播种系统和控制系统等几个部分。其中,送料系统负责将种子从种子箱中输送到播种系统中,种子储存系统负责储存种子,播种系统则是将种子精准地排放到田地中,控制系统则是对整个播种过程进行控制和调节。
1)送料系统。送料系统由送料器和送料管道等组成,其中送料器是将种子从种子箱中输送到播种系统中的主要部件,可以采用旋转式或者振动式送料器,通过送料管道将种子输送到播种头部分。
2)种子储存系统。种子储存系统是负责储存种子的部分,采用密闭式设计,防止种子受到外部环境的影响。种子储存器通常设置在播种机的前部或者侧面,方便对种子的添加和更换。
3)播种系统。播种系统是将种子精准地排放到田地中的主要部分,主要由播种头、窝孔排种器、覆土板和压实器等组成。其中,播种头是将种子导向窝孔排种器的部件,窝孔排种器是将种子从窝孔中排放到田间的部件,覆土板和压实器则是确保种子与土壤接触良好,有利于生长的部件。
4)控制系统。控制系统是对整个播种过程进行控制和调节的部分,一般采用单片机或者PLC控制系统,通过编程来实现种子的精准控制和自动化操作。控制系统还可以设置各种传感器来实现对种子流量、速度、密度等参数的实时监测和调节。
2.2 工作原理
蔬菜精量播种机的工作原理是将种子从种子箱中输送到播种系统中,然后通过窝孔排种器将种子精准地排放到田地中,最后由覆土板和压实器确保种子与土壤接触良好,有利于生长。在整个播种过程中,控制系统通过编程来实现对种子流量、速度、密度等参数的实时监测和调节,确保播种精准性和稳定性。蔬菜精量播种机通过精准控制种子流量和速度,以及窝孔大小和排放速度,实现对种子的精准控制和自动化操作,提高了播种效率和播种质量。
3 关键部件的设计
3.1 传动系统的设计
风力传动系统是蔬菜精量播种机的重要组成部分,主要由风机、带传动、带轮联轴器等组成。风机通过带传动在带轮联轴器的带动下高速旋转,形成正负压,为排种器的吸种和落种提供动力。通过试验测得,常见类球型蔬菜种子所需吸种负压值不大于4 kPa,因此将4 kPa作为设计参考量。经试验测量,所选的负压风机转速为6 000 r/min时,负压风口的压力值为4 kPa,此时出风口的正压值为500 Pa。汽油机输出轴额定转速为3 600 r/min,因此风力传动系统第一级传动比可确定为1.67,即联轴器带轮直径D1与风机带轮直径D2之比为1.67。这样的设计可以保证风力传动系统能提供足够的动力,以确保蔬菜精量播种机的正常运行。
3.2 播深调节系统的设计
播深调节系统是蔬菜精量播种机的关键组成部分之一,可以调整种子的播深,从而满足不同作物的播种要求。一般来说,播种深度的调节可以通过改变种子落地时排种器的高度来实现。具体设计中,可以采用可调节的支架,通过调整支架的高度,改变排种器的高度,进而实现种子的不同播深。同时,支架可以使用带有刻度的调节螺旋杆,以实现精确的播深调节。此外,还可以在支架上设计限位装置,以保证播种深度在一定范围内可控,不会过深或过浅。
4 田间试验
4.1 试验方法
1)选定试验田地并准备好相应的试验材料,包括种子、肥料、土壤等。
2)根据不同的试验设计要求,制定相应的试验方案和实验指标。
3)进行机器的调试和预试,以确保机器的正常运行和调整到适合试验要求的工作状态。
4)进行试验操作,在试验田地内播种,记录相关数据,并进行实时监测和记录。
5)在试验结束后,对数据进行分析和处理,包括统计分析、误差分析等,从而评估蔬菜精量播种机的性能和优化方案。
4.2 测定值指标与方法
1)播种深度。使用深度计测量播种深度,根据标准计算播种深度的误差。
2)播种均匀度。采用取样方法,在不同地点取样,统计播种量,根据标准计算播种均匀度的误差。
3)种子萌发率。在播种后的一定时间内,取样计算种子萌发率,根据标准计算种子萌发率的误差。
4.3 结果与分析
播种深度试验结果如表1所示。结果表明,在所做的10次试验中,播种深度的误差在25%以内,其中有3次误差大于或等于20%,说明在某些情况下,蔬菜精量播种机可能无法精确控制播种深度。需要进一步优化设计,提高精度。
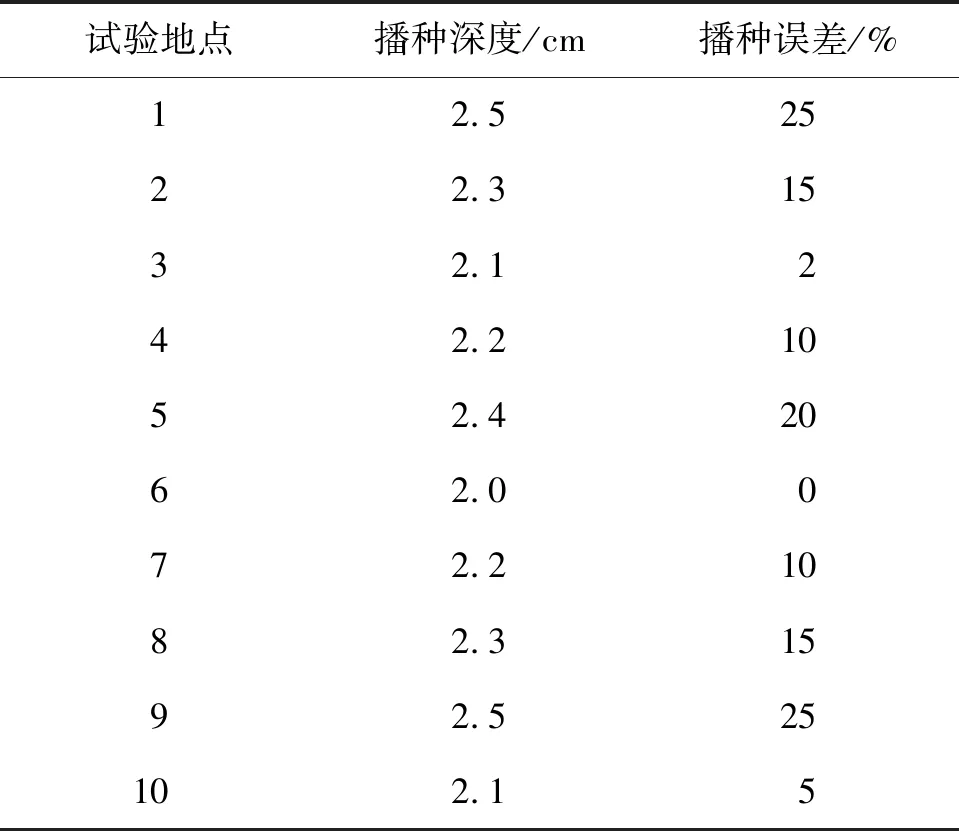
表1 播种深度试验结果
播种均匀度试验结果如表2所示,播种机的播种均匀度较高,试验中均匀度均在90%以上,其中有2次试验的均匀度达到了97%左右,说明本次设计的播种机在保证精度的同时,能实现较高的播种均匀度,能满足实际种植需求。
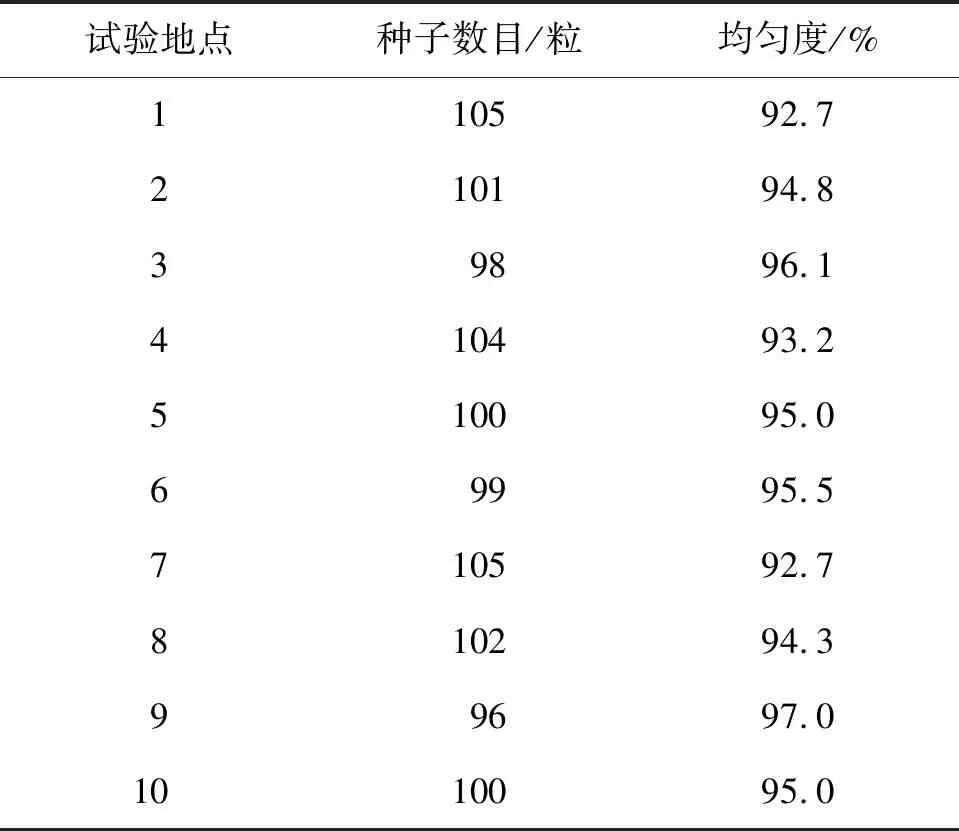
表2 播种均匀度试验结果
种子萌发率试验结果如表3所示,在所有蔬菜种类中,精量播种机播种的实验组的萌发率都高于人工播种的对照组。但是,在不同的蔬菜种类中,精量播种机播种的实验组与人工播种的对照组之间的萌发率差异并不相同,表明不同的蔬菜品种对播种方式可能有不同的响应。
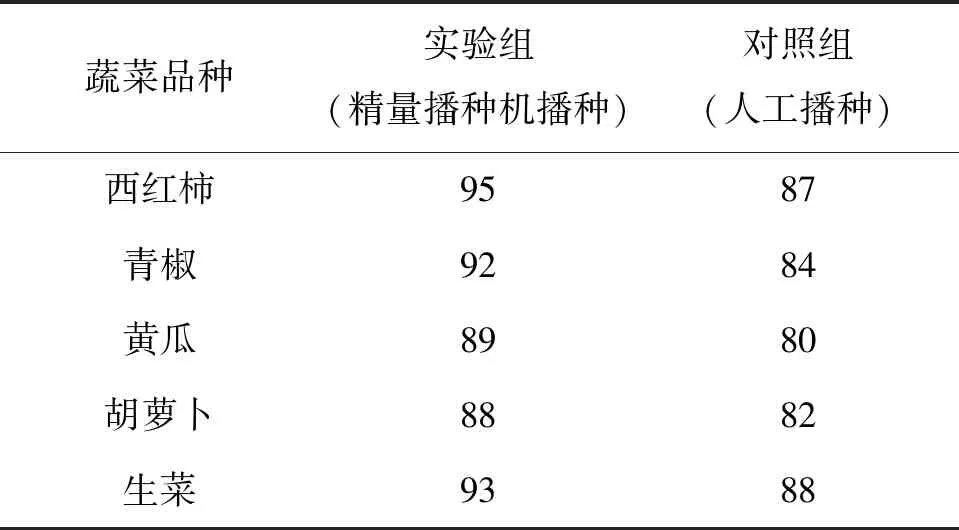
表3 种子萌发率试验结果 单位:%
5 结论
本文设计了一种新型蔬菜精量播种机,该机采用风力传动和可调节播深系统,能实现蔬菜种子的精准定量播种。经田间试验,该机播种深度均匀且调节灵活,播种均匀度高,种子萌发率良好,具有较好的播种效果和适用性。与传统的手扶式播种机和气力式播种机相比,该机具有操作简便、投入成本低、精准播种等优点,可以满足不同规模和需求的蔬菜种植者的播种需求。
