线束在自动驾驶汽车上的应用
2023-09-19唐太师赵桂菊邱睿
唐太师 赵桂菊 邱睿

【摘 要】在人工智能技术、自动控制技术、计算机技术、信息融合、传感技术和通信技术集中运用的推动下,信息通信和汽车行业的融合成为必然之举,汽车产业或在不久之后迎来跨时代的改革,而软件与功能之间的连接需要线束来实现。本文主要阐述线束在自动驾驶领域中的作用,主要从汽车自动驾驶线束的工作原理、布置组成、材质选择以及压接技术等方面进行论述,希望通过运用科技手段来提高线束品质,以便能在未来汽车市场上占有一席之地。
【关键词】自动驾驶;自动驾驶线束;线束压接;线束材质
中图分类号:U463.62 文献标志码:A 文章编号:1003-8639( 2023 )09-0014-02
Application of Wire Harness in Autonomous Vehicle
TANG Taishi, ZHAO Guiju, QIU Rui
(Liuzhou Shuangfei Auto Electrical Parts Manufacturing Co., Ltd., Liuzhou 545112,China)
【Abstract】Driven by the centralized application of artificial intelligence technology, automatic control technology, computer technology and information fusion, sensing technology and communication technology, the integration of information communication and the automotive industry has become an inevitable move. The automotive industry may soon usher in a cross era reform, and the connection between software and functions requires wiring harnesses. This article mainly elaborates on the role of wiring harnesses in the field of autonomous driving, mainly discussing the working principle, layout composition, material selection, and crimping technology of automotive autonomous driving wiring harnesses. It is hoped that through the use of technological means, the quality of wiring harnesses can be improved, so as to have a place in the future automotive market.
【Key words】autonomous driving; automatic driving harness; wire harness crimping; wire harness material
作者简介
唐太师(1990—),男,主要从事汽车整车低压线束设计开发、汽车智能驾驶开发工作。
1 自动驾驶技术现状
随着自动驾驶技术的深度开发,市场上已初步实现自动驾驶技术为L0~L2级别的汽车,某些厂家已经初步达到L3级别自动驾驶的标准,但是若需普及L3级别的自动驾驶还有很多方面需要完善,其中最重要的一点就是可靠性。由于是一项新技术,还没有经过大量的时间检验,难保没有安全隐患。试想,就L3级别的自动驾驶技术而言,若车辆遇上无法识别的情况,需要驾驶员接管车辆,而此时驾驶员却不能及时接管,那么很可能就会发生交通事故。因此,一款可靠的自动驾驶系统就显得至关重要,而软件与功能之间的连接需要线束来实现,对有汽车血脉之称的线束而言亦面临着严峻的挑战。
2 自动驾驶的线束工作原理
自动驾驶的主要部件由主控制器ADU、网关、前后摄像头、前后雷达等组成。雷达传感器和摄像头均需使用先进的传感器、执行器,雷达与摄像头可以收集1~200m道路信息传回主控制器,主控制器ADU对雷达和摄像头传输回的数据进行分析计算,计算结果通过网关实现与汽车各系统的交互,从而达到对驾驶员、驾驶车辆、驾驶路面情况信息的全面监控,让车辆能够敏锐感知到周围的环境,并自主分析车辆的运行情况以及车辆可能遇到的危险情况,让车辆在运行过程中更加安全,实现安全性与平稳性的双重效应。线束从中起到一个桥梁的作用,其需要把摄像头录制到的信号平稳且快速地传输到主机上,主机计算出结果之后再通过线束快速传輸到网关,网关得到结果后把指令通过线束输送到整车控制器,整车控制器得到结果后做出反应,还需要通过线束传递到各个功能件,线束犹如人体血脉一般输送着各种电源和信号。
1)自动驾驶的电源。自动驾驶主机的电源通常是KL30+KL15,KL30主要是为各功能件提供电源,KL15为唤醒电源,启动车辆时不能关闭此电源,目前大部分汽车使用的前后雷达为毫米波雷达,毫米波雷达具有穿透力强、技术成熟、成本低的特点,缺点是探测距离较短,无法感知行人,对目标无法细化识别,因此毫米波雷达通常使用的是KL15电,既能满足性能要求又能降低静态能耗;而激光雷达是智能驾驶汽车主要动态障碍物检测传感器,其主要特点是探测精度高,受光照影响小,可以用来描绘周围环境参数,亦需要KL30+KL15电源的组合,KL30电可以持续供电,KL15只做唤醒用。其余的摄像头一般均由主机供电。
2)自动驾驶的搭铁。智能驾驶的搭铁属于重要系统,且易受其他用电器干扰,搭铁点最好能单独设定并离用电设备相对较近,搭铁位置要设置在能够防腐蚀的地方,由于后雷达位置的搭铁点易受污水、灰尘的腐蚀,所以应该通过线束主干把搭铁点设定在舱内的车身上。
3)自动驾驶的信号线。自动驾驶的信号传输使用CAN网络进行传输,通常左右雷达上会带有终端电阻,CAN线的终端电阻为120Ω,主机作为CAN线分支,由于分支点不能超过1m,主机与雷达距离较远,不能满足线束的设计需求,因此常常采用对CAN进行绕线的方法进行应对。
自动驾驶对安全可靠性要求比较高,面对复杂的行驶情况和车内电器情况,信号传输要求也很高,由于传输过程不能受到干扰,因此线束的性能要求显得格外重要。线束需要在保证自身可靠性的前提下屏蔽各方干扰,在材料与工艺上均需提高选择的等级。
3 自动驾驶线束在整车的布置
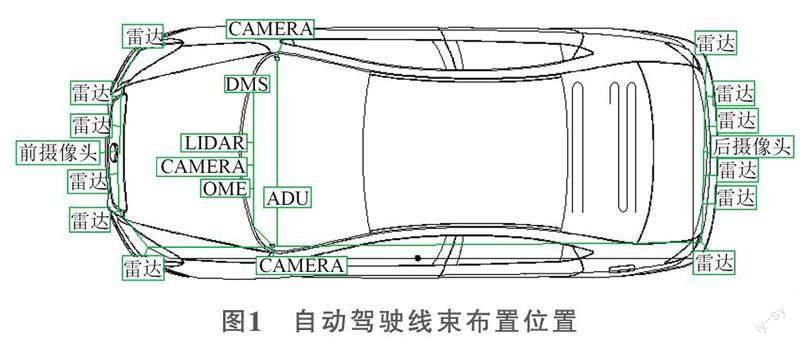
自动驾驶线束需要贯穿汽车的前部、后部和左右两侧,目前由于技术的不完善,大部分车企还停留在自动驾驶的L2~L3阶段,仍然需要驾驶员操控,市面上的自动驾驶汽车均保留了DMS和OMS摄像头,因此线束布置还涉及到车内。自动驾驶线束布置位置如图1所示。
1)自动驾驶ADU一般布置在仪表台里面。仪表台内部空间狭小,线束布置会很困难,因此线束会考虑分段布置,在宽阔的地方增加一对inline来连接仪表线束与自动驾驶相关线束,或者把一些功能分化出去,自动驾驶相关线束整合在主线中。
2)前摄像头和前雷达布置在前保险杠上。从驾驶舱内的ADU连接到前保险杠上需要跨过机舱与驾驶舱的前围钣金,因此选择使用一对inline来连接二者是最佳选择,并且由于舱外是湿区,inline最好不要放在舱外。
3)左右两侧的摄像头通常布置在左右后视镜上。要从主机过渡到摄像头,势必需要经过门与车身的对接,门线的橡胶件设计就比较重要,橡胶件的弯折角度不能过大,而且必须具有伸缩性。
4)后视摄像头与后雷达通常布置在后背门和后保险杠上。从后保险杠到车子前部需要经过整个车身,这一段距离非常长,布置上需要每隔一段距离增加一个固定点,必要的地方还需要增加护板进行防护。为了保证装配的便利性,仪表线束增加与车身线束的inline,仪表台附近的inline通常整合在一起,使用护板固定起来,便于管理与维护。
4 自动驾驶线材的选择
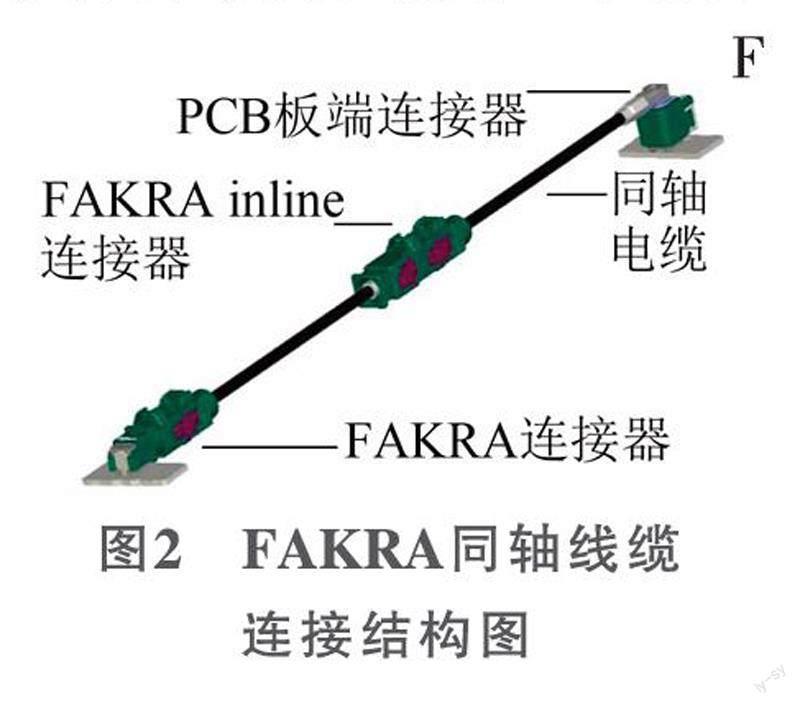
基于自动驾驶高可靠性的要求,普通的铜导线无法实现视频信号的高清传输,这对于自动驾驶来说是一个致命缺陷,无法准确识别路面特征、距离等图像处理,就无法准确地对汽车周边环境进行检测以及对汽车进行定位,因此视频线选择的是FAKRA同轴线。FAKRA同轴线缆连接结构如图2所示,主要包括FAKRA连接器、FAKRA inline连接器、同轴电缆、PCB板端连接器。
1)FAKRA连接器主要参考的截面尺寸标准有ISO 20860-1和USCAR-18,测试标准主要有ISO 20860-2、USCAR-17和USCAR-2,尺寸标准定义了FAKRA连接器轴向和径向方向的主要尺寸。公端连接器截面尺寸标准如图3所示。
在不同公司的产品中,存在绝缘介质材料并不相同的情况,应该在符合标准的前提下,对不同绝缘材料和截面结构的连接器进行匹配试验,验证相关电性能指标是否在规定数值范围内。
2)FAKRA inline连接器提供了有效的分段手段,但是在使用FAKRA inline时,尽量不要过多使用,因为在inline对接时会产生插入损耗,inline越多,损失得就越多,因此应尽可能地少用FAKRA inline,并且选择的一对inline应尽可能选择同一个厂家,这样可以保证性能,也能减少切换厂家后对性能的评估和测试。
3)FAKRA使用的同轴电缆导体是铜丝,外包一层泡沫填充物,屏蔽以金属铜网或铝镁合金编制网为主,绝缘材料一般为聚氯乙烯。目前,国家使用的电缆标准是GBT14864—1993的标准,同时电缆的好坏还需要测试与端子的保持力。
4)FAKRA板端连接器与线端连接器需保证插件尾部和PCB连接的设计要求,线束端和板端也最好能为同一个厂家产品,以此避免由于结构差异导致的性能缺陷。
5 自动驾驶线束的压接
传统线束主要采取的压接方式为U型端子连接,传统的冷压接方式简便、成本低,大部分非关键部位使用的压接方式还是U型端子冷压接。由于U型端子是依靠大冲压力将铜丝压缩到一起,主要依靠铜丝之间的摩擦力来连接,压接后势必会存在一定的空洞,从而导致电压降增大,导电性能下降。然而在自动驾驶的高要求下,特别是使用的基本上是CAN通信,因此要求使用超声波焊接。
超声波焊接原理是通过高频机械振动对线束物料工件进行焊接。在焊接过程中,超声波线束焊接机有3个方向同时收紧至超声波焊接端面,以20kHz的频率在其表面进行循环往复地振动,同时对工件施加压力,使工件间形成一种牢固的结合,从而达到焊接的效果。对于采用超声波线束焊接,整个焊接过程可以被精确地控制,同时不会在金属表面产生多余的热量,焊接牢度强。由于超声波焊接是把铜丝完全焊接在一起,因此导电性能远优于U型端子的冷压接。超声波焊接以其优秀的焊接牢度和稳定的导电性能,必能胜任自动驾驶的需求。
6 结语
随着人工智能、视觉计算、雷达、监控装置和全球定位系统的高速发展,自动驾驶汽车运用先进技术,相信在不久的未來,必能造出在无人类主动操作下自动安全行驶的机动汽车。因此,汽车线束人亦需不断探索先进技术,运用科技手段提高线束品质,大力把先进生产设备投入到使用当中,才能在未来占得一席之地。
参考文献:
[1] QC/T29106—2004,汽车低压电线束技术条件[S].
[2] USCAR-2,Performance Specification for Automotive Electrical Connector Systems[S].
[3] ISO 20860-2—2009,道路车辆 50Ω阻抗无线电频率连接系统接口[S].
[4] 华经产业研究院. 2021—2026年中国自动驾驶行业市场供需格局及行业前景展望报告[M]. 北京:北京产业信息研究院,2021.
(编辑 凌 波)
