空间引力波探测惯性传感器关键技术与进展
2023-09-18吴树范张倩云刘梅林沈强
吴树范,张倩云,刘梅林,*,沈强
1.上海市引力波探测前沿科学研究基地,上海 200240
2.上海交通大学 航空航天学院,上海 200240
1 引言
高精度的引力波探测是未来基础科学领域最前沿的研究课题之一[1]。空间引力波探测器相对于地面探测器来说对中低频段更敏感,具有独特的科学价值。目前最具代表性的空间引力波探测计划有欧洲航天局(ESA)的引力波探测计划LISA及其先驱任务LISA Pathfinder(LPF)[2];以及国内中山大学牵头发起的“天琴计划”和由中国科学院与欧洲航天局合作发起的“太极计划”。“天琴计划”将在距离地球表面1×105km高度的同一绕地轨道面内放置三颗航天器,各个航天器之间相位角相差120°,测量频段在1mHz~0.1Hz[3]。“太极计划”预计在2033年前后发射由三颗卫星组成的引力波探测星组,与LISA类似在绕日轨道上形成一个等边三角形,卫星之间相距3×106km,测量频段在0.1mHz~1Hz[4]。
空间惯性传感器作为空间引力波的关键载荷之一,其内部的检验质量(Test Mass,TM)为激光干涉仪提供惯性基准[5-6]。如图1所示为天琴测量星座组成的激光干涉仪测量平台,三颗卫星两两之间构成激光测量臂。引力波会引起时空的伸缩,当引力波经过测量臂时,时空伸缩引起的光程差被干涉仪读取,图中黄色部分代表的是惯性传感器的检验质量,它是卫星本地测地线的参考点。

图1 天琴激光干涉仪测量平台[6]
惯性传感器由检验质量、电极笼、前端电子学系统以及辅助系统构成,如图2所示。其中检验质量是惯性传感器的核心部件,前端电子学系统包括电容位移传感、静电执行机以及控制器三大部分,辅助系统包含锁紧释放系统、紫外放电系统、真空系统,辅助系统处于检验质量的外围,锁紧释放系统负责保证发射时检验质量的安全,紫外放电系统负责管理检验质量上残余电荷,真空系统用于支撑检验质量和电极笼。惯性传感器的主要功能可以分为以下两种[7]:

图2 空间惯性传感器系统组成示意
1)对航天器受到的非保守力,如大气阻力、太阳光压等作用而产生的加速度进行测量,并反馈给航天器的无拖曳系统,该系统通过控制微推进器产生与之相对的加速度来抵消这部分的非保守力的作用。
2)作为激光干涉测量系统的一部分,为激光干涉提供惯性基准,通过测量检验质量与航天器之间的相对位移验证激光干涉系统的性能。
这两种功能对应着不同的工作模式,即加速度计模式和惯性参考模式。在一般的空间应用场景下例如测量非引力、引力梯度、弱力检测等采用加速度计模式,在该模式下,检验质量跟随航天器运动。在空间引力波探测中一般使用惯性参考模式,航天器跟随检验质量运动,检验质量作为惯性基准,这就要求在该模式下检验质量敏感轴上的残余加速度噪声必须控制在极低的水平,残余加速度噪声即惯性传感器的关键指标。
目前国内外的空间引力波探测计划对于残余加速度噪声指标的要求均在10-15m/s2/Hz1/2量级。国外目前在轨测试噪声水平已达到10-15m/s2/Hz1/2量级,中国目前用于空间引力波探测的惯性传感器噪声水平在10-12m/s2/Hz1/2量级,仍存在3个数量级的差距。可以看出,空间惯性传感器的设计仍面临着极大的挑战。本文将从空间惯性传感器的工作原理、关键技术、研究进展几方面入手分析总结空间惯性传感器的设计思路及研究现状,同时对未来惯性传感器的研究突破方向进行了初步探讨。
2 空间惯性传感器工作原理
空间惯性传感器的工作原理可以看作一个检测系统,传感器外壳受到的外界干扰加速度可以看作输入量,检验质量相对惯性传感器的位移为输出量,其基本模型可以看作由检验质量、阻尼系统和轻弹簧组成。
传感器受到外界非保守力的作用会产生加速度,而检验质量由于惯性的作用会保持原来的运动状态,与传感器发生相对运动。前端电子学单元利用差分电容传感实现检验质量位置和姿态的高精度检测,将检测到的位置及姿态信息传递给控制系统,由控制系统计算出相应的控制力,并转换为电压幅值信号,通过静电执行机构产生反馈电压施加在极板上,以此产生静电力来实现对检验质量的六自由度控制,即“电容位移传感+静电反馈控制”,如图3所示。目前,空间引力波探测任务中的高精度惯性传感器主要采用这种工作原理。

图3 惯性传感器工作原理示意[12]
如图4所示为信号在惯性传感器内部的传递形式。在执行机回路中,输入是来自无拖曳系统的控制力信号,在回路中首先将控制力转换为电压控制信号,电压控制信号通过一系列的变化变成施加在极板上的电压Vf,这个电压信号对检验质量会产生静电力,控制检验质量的平动和转动,在电容位移传感回路中,检测极板与检验质量间的电荷变化,将变化量传递给无拖曳系统,计算出所需的控制力传递给执行机回路。所以惯性传感器就是引力波探测科学卫星的无拖曳姿态控制系统的一个核心传感器兼重要执行机构,既感知和检测细微的相对运动,同时,通过静电反馈控制的协助,以实现对外环卫星姿态的无拖曳控制目标。
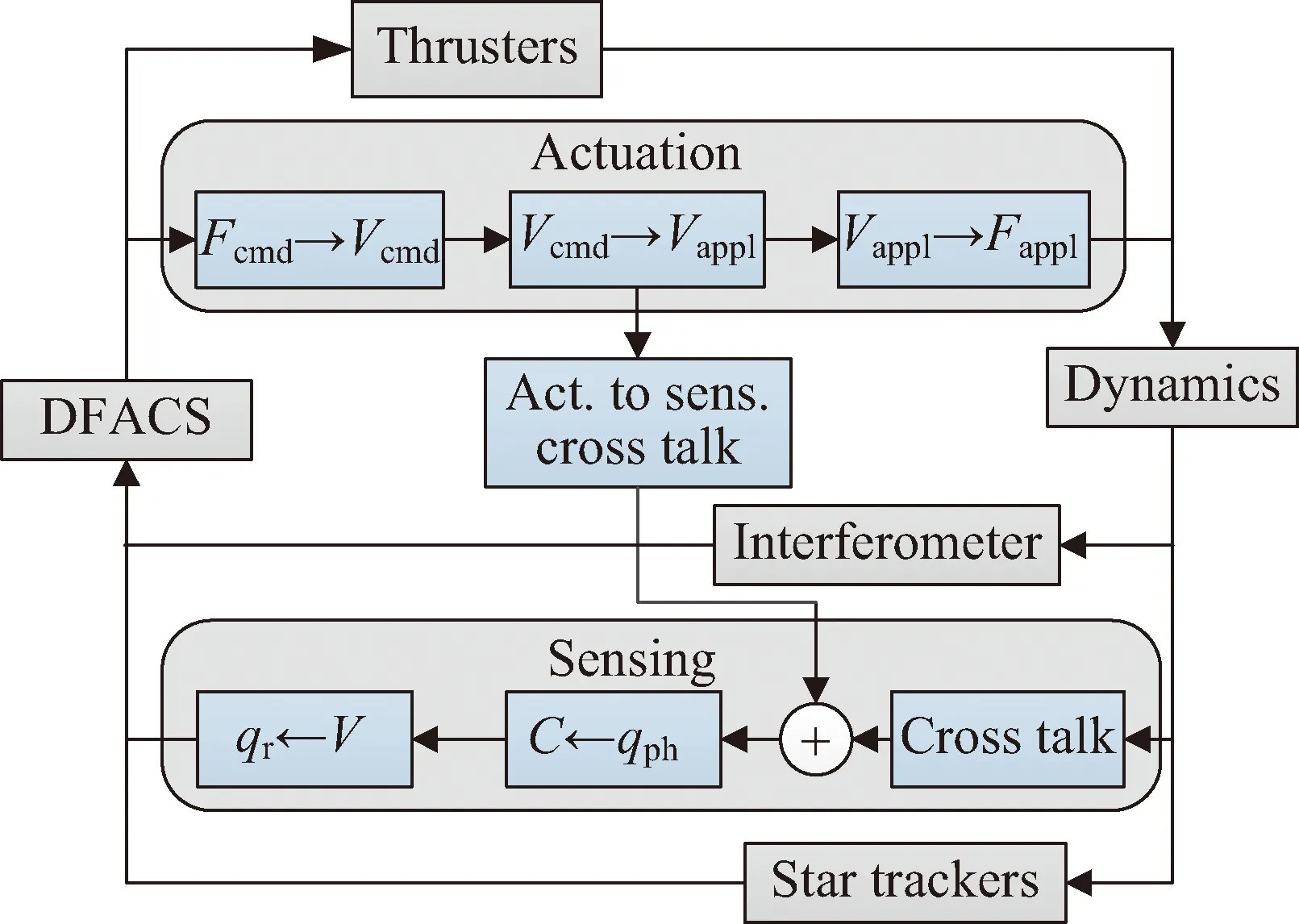
图4 惯性传感器信号传递形式
3 空间惯性传感器关键技术
目前大部分空间惯性传感器主要基于“电容位移传感+静电反馈控制”的工作原理,因此,电容位移传感及静电反馈控制是空间惯性传感器设计时的两大关键技术。此外,在空间惯性传感器入轨前必须对其功能和性能指标进行相应的地面验证以确保并评估系统的基本功能和在轨状态。以下将从这三个方面介绍空间惯性传感器的关键技术。
3.1 电容位移传感技术
位移测量是惯性传感器主要功能之一,而以差分电容传感器为基础的惯性传感器能够对缓变外界扰动力所造成的微小位移进行纳米级精确测量。电容位移传感将检验质量的位移转换成相应的电容变化量,并通过电容变化量来表征(评价)被测物理量[8]。电容传感器通常由传感元件和检测电路组成,如图5所示。传感元件感知被测物理量并将其转化为电容信号输出,检测电路将电容信号转换成易于测量的电压或者电流信号。

图5 电容传感原理示意[12]
目前,惯性传感器通常使用结构形式简单的平行板电容器作为测量基础器件以降低设计加工难度。根据平行板电容器的基本原理,忽略边缘效应,其电容值可以表示为[9]:

(1)
式中:ε0和εr分别代表真空介电常数和相对介电常数,相对介电常数与材料属性相关,在轨时电极间介质可近似为真空即εr=1;A为有效电极面积;d为电极之间的间距。
从式(1)可知,要改变电容的大小可以从改变介电常数、有效电极面积、电极间距三个方面进行。但是在真空环境中,改变介电常数需要依靠改变材料介质来实现,不仅工艺复杂而且难以满足高可靠性和高精度的需求,因此一般不采用这种方法,目前主要采用的是变面积和变间距这两种方式,从几何结构的角度来改变电容值,从而建立位移与电容变化间的相互关系。
在实际设计中,对于变面积电容传感,需要考虑面积变化过程中的电极边缘效应,多自由度测量情况下存在的轴间耦合误差以及复杂的结构形式[10]。对于变间距的传感来说,需要在设计中考虑位移变化与电容变化超出一定区间后呈现非线性关系的问题,可以通过伺服反馈将检验质量控制在线性区间内。此外,当检验质量同时进行转动和平动时,检验质量和极板不再满足平行关系,如图6所示为检验质量与极板间距示意图,EL1-EL4表示四块极板。可以看出,极板间距与平动位移x,y及转动角度φ有关,对于高精度空间引力波探测的惯性传感器来说,需要考虑平动位移和转动角度的耦合关系。平动转动间的耦合会给位移信号的测量带来噪声,同时,惯性传感器中静电反馈与位移传感间也会存在耦合,施加的静电反馈控制力会对位移信号的测量引入额外的耦合噪声,如图4所示。因此,在对位移传感模块进行设计时,应首先对各项噪声进行研究,进行噪声预算分配,再根据分配的指标进行相应的设计。
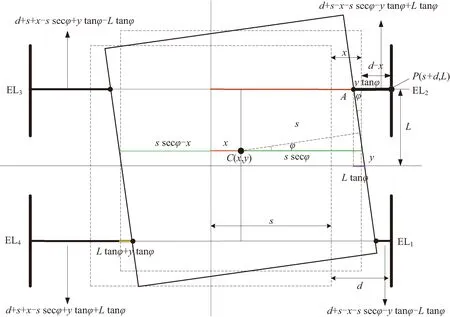
图6 检验质量与极板间距示意
3.2 静电反馈控制技术
传感电路将检验质量与极板间的电容变化转换为电压信号,执行机回路将电压信号施加在极板上,当一对极板上施加的电压不相等时,会对检验质量产生静电控制力,控制检验质量的运动[11-13]。检验质量的运动可以分解为平动和转动,如图7所示。
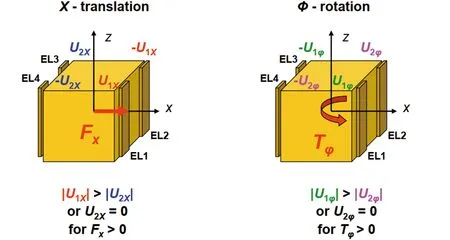
图7 静电反馈控制原理示意图[13]
图7表示的是检验质量在x方向上的平动和绕着z轴的转动,由分布在检验质量外的EL1~EL4四块极板控制。施加控制平动的电压u1x和u2x,产生的平动静电力如下:

(2)
施加控制转动的电压u1φ和u2φ,产生的转动静电力如下:

(3)
式中:ε为极板间介质的介电常数;Sx为x轴方向的单个极板的面积;di为第i个极板与检验质量之间的距离;d0为极板标称距离;C0为标称距离下的标称电容值。从式(2)(3)可知,改变一对极板的电压,可以在检验质量上产生相应的静电力,且一对极板上的电压差值越大产生的静电力越大。
对极板施加的电压有两种类型:直流电压与交流电压[13]。当采用直流电压时,平动电压和转动电压会产生耦合静电力。为了避免耦合的影响,施加直流电压一般采用分时控制的方式,即在一个周期内只施加平动电压或转动电压。然而在实际控制中需要对平动与转动这两个自由度同时进行控制,直流电压的分时控制难以满足要求。而交流电压通过采用不同的频率来消除耦合电压对静电力的影响,可以实现对检验质量两个自由度进行同时控制且相互独立,因此目前静电反馈控制中主要使用交流控制的方式。
3.3 地面评价方法
空间惯性传感器在入轨前必须对其功能和性能指标进行相应的地面验证,一方面有利于验证系统设计的覆盖性、稳定性、可靠性,另一方面有利于确认系统基本功能并估计惯性传感器的在轨工作状态和能力。因此在地面如何对空间惯性传感器进行全面地测试,特别是对一些关键性能和指标的验证就显得尤为重要[14]。
空间惯性传感器工作在空间微重力环境下,不受重力约束,呈“悬浮”状态。而在地球表面由于受到重力和大地脉动的影响,导致惯性传感器无法完全正常工作,从而无法对其全面标定。同时空间惯性传感器分辨率非常高,量程往往又比较小,远小于重力加速度。所以必须采用一些特殊的手段来抑制地球重力对测量的影响。通常采用的方法有高压悬浮[15]、悬丝扭摆[16]、自由落体[17]。
高压悬浮方式对电极在竖直方向上施加高压,产生的静电力使检验质量在电极笼内实现自由悬浮,从而实现对检验质量六个自由度的指标测试。华中科技大学研制的高压悬浮原理样机目前可实现对71g的检验质量进行指标测试[18]。
悬丝扭摆采用悬丝的张力平衡检验质量所受到的重力,使检验质量在一定程度上能够自由运动,模拟在轨时的自由状态。 采用一根悬丝将检验质量悬挂,检验质量在扭转方向能够自由运动,再将悬丝和检验质量悬挂在扭秤的端点处,另一端添加质量相同的配平质量,形成二级扭摆系统。一级悬丝的转动可以直接反映检验质量的平动,由此进行惯性传感器的两自由度测试。如图8所示为二级扭摆示意图。

图8 二级扭摆示意
自由落体方式将惯性传感器放置于胶囊发射器内,利用落塔力学实验环境,使惯性传感器进行自由落体运动,利用自由落体过程中产生的微重力环境模拟在轨环境,实现对惯性传感器六自由度控制能力的测试。该方式是最接近在轨运行状态的方式。但由于下落距离短,实验时间只有几秒,无法对分辨率指标进行评价。
表1所示为不同地面评价方式的优缺点对比。

表1 惯性传感器不同地面评价方式优缺点对比
4 空间惯性传感器研究进展
空间引力波探测任务中的高精度惯性传感器主要采用“电容位移传感+静电反馈控制”的工作原理。国外研究机构惯性传感器研究进展如表2所示。
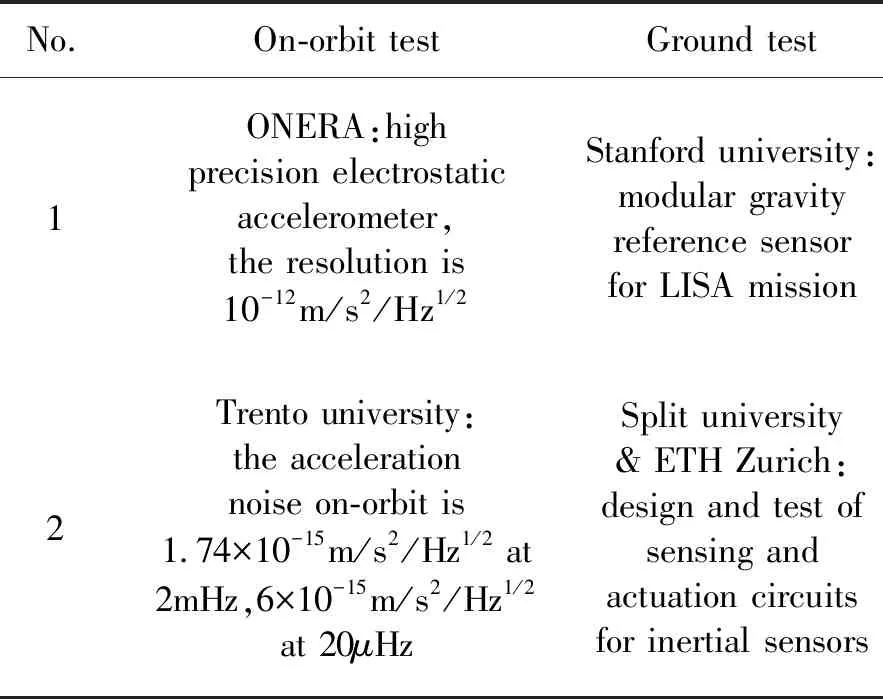
表2 国外研究机构惯性传感器研究进展
其中,ONERA从1964年起研制了第一代高精度静电加速度计CACTUS,并于1975-1979年在CASTOR-D5B卫星上搭载。在轨实验数据处理表明,其分辨率达到了10-9m/s2。随后ONERA承担了一系列空间计划的静电加速度计的研制工作。典型成果体现在CHAMP、GRACE、GOCE、GRACE Follow-on四颗重力卫星上的主载荷——静电加速度计STAR、SuperSTAR、GRADIO、SuperSTAR-FO,在测量频段内的噪声谱密度分别达到3×10-9m/s2/Hz1/2、1×10-10m/s2/Hz1/2、2×10-12m/s2/Hz1/2、1×10-10m/s2/Hz1/2,上述静电加速度计采用导电金丝注入载波,反馈控制方式均采用直流静电反馈控制[17,19-21]。
意大利Trento University主要承担了LISA Pathfinder(LPF)中的空间惯性传感器的设计和地面测试工作。该空间惯性传感器面向空间引力波探测的需求,相对于ONERA所设计的静电加速度计在残余加速度指标上有了明显的提升。其采用紫外放电技术代替原本的金丝导电技术以抑制导电金丝的影响,并采用交流的静电反馈控制技术保证检验质量的零电位,用改进的静电模型分析了由杂散静电场作用于导电壳内的带电检验质量造成的力噪声,并结合实验数据说明了如何正确地测量和消除与测试质量电荷相互作用的杂散场。同时搭建了高精度地面二级扭摆系统,开展惯性传感器的地面性能评估,在轨测量结果显示加速度噪声在2mHz为1.74×10-15m/s2/Hz1/2,在20μHz为6×10-15m/s2/Hz1/2。斯普利特大学University of Split和苏黎世联邦理工学院ETH Zürich主要开展LPF中惯性传感器的传感和反馈电路系统研制与测试,如图9所示,并对空间惯性传感器系统的传感与驱动电子系统中的噪声进行详细分析与抑制,对前端电路和载波稳定性也开展了相关的设计和验证[13]。可以看出空间引力波任务和其他空间任务核心指标需求存在一定差异,空间引力波探测采用惯性基准模式,而其他空间任务大多采用加速度计模式,不同的空间应用场景下,对检验质量上噪声水平的要求不同,这就导致关键技术在应用时会存在差异。
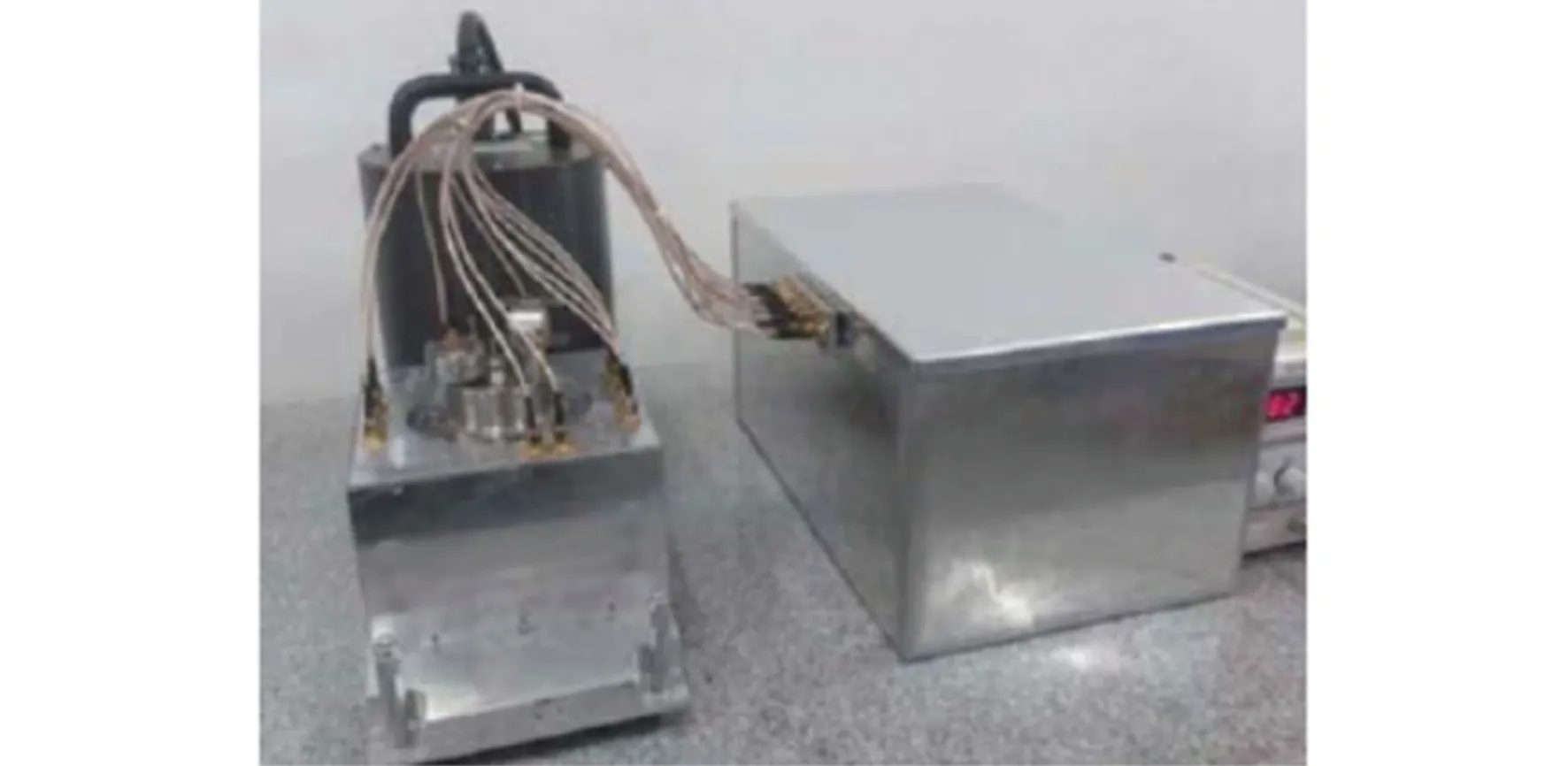
图9 LPF惯性传感器前端电子学部件[13]
此外,国外其他研究机构也开展了一系列的研究以达到对传感器检验质量精确控制的目的。Armano Md等人[22-23]。研究了静电驱动系统的精度及其对LPF主要观测值的影响,并开发了一个基于LPF设计的模拟器来计算接近现实的驱动电压,从而得到驱动力,实现对检验质量的精确控制。M O Schulte等人[24]设计了充电管理装置(CMD)来消除低噪音影响下连续充电或高放电率下间歇充电需要从测试质量去除静电电荷。Nico Brandt等人[25]对惯性传感器进行了全面的静电有限元分析,针对不同的检验质量平动和转动,提取了检验质量在6个自由度内的静电力和扭矩,以及检验质量与18个电极和外壳之间所有不可忽略的电容。并提出了一种适应解析静电模型,更准确地反映传感器的静电力、力矩和刚度值,为检验质量多自由度耦合控制提供了理论依据。上述研究均是基于对检验质量的精确控制的目的开展的,因此对检验质量的精确控制是实现高精度低噪声的空间引力波探测惯性传感器的基础。
国内从事基于“电容位移传感+静电反馈控制”的工作原理的相关惯性传感器的研究机构主要有中山大学、华中科技大学、兰州物理研究所、中科院、清华大学、上海交通大学等。中山大学自2014年起开展引力波探测任务中惯性基准系统的指标分析、误差计算与方案设计,研制了空间引力波探测任务中的惯性基准系统,并成功应用于TianQin-1试验卫星,在轨测试精度为0.1Hz处5×10-12m/s2/Hz1/2[26]。华中科技大学多年来针对重力卫星任务,研制了多套静电悬浮加速度计工程样机,搭建单级/二级扭摆系统开展静电悬浮加速度计的多自由度地面性能测试与评估,测试精度可达10-12~10-11m/s2/Hz1/2量级;并针对引力波探测任务中静电加速度计的低扰动需求,开展控制器设计以及交流反馈控制研究[14,27-28]。兰州物理研究所采用高压悬浮技术开展地面静电加速度计的性能测试,并开展静电加速度计样机研制,搭载于Taiji-1试验卫星[29-30]。中国科学院长春光学精密机械与物理研究所为Taiji-1试验卫星研制了一套具备搭载条件的空间惯性传感器敏感结构工程样机,开展了地面测试对关键指标进行了测试评估,并根据实验数据对在轨性能进行了评估[7,31]。上述国内研究机构大多是基于中国“天琴计划”和“太极计划”的空间引力波探测需求来开展对惯性传感器的研制。此外,针对其他的空间测量任务,清华大学研制了星载硅微静电悬浮加速度计,并开展地面相关测试;并基于等效原理检验计划开展空间惯性传感器研制[32],同样推动着空间惯性传感器技术的发展。如表3所示,为上述研究机构的主要研究内容及相关成果。

表3 国内研究机构惯性传感器研究进展
上海交通大学牵头承担了国家“引力波探测”重大专项中的惯性传感器研究专项,与多个研究机构协作,共同开展空间引力波探测惯性传感器相关技术的研究与工程实现。重点针对传感器低噪声多自由度控制方法开展研究,研制惯性传感器控制系统原理及工程样机,实现空间引力波探测惯性传感器高精度控制。目前在理论方面已开展基于模型参考自适应抗饱和的惯性传感器解耦控制技术研究,如图10所示,基于固定时间观测器及数据驱动方法的噪声预估与抑制技术研究、考虑输入滞后与通讯中断、硬件计算性能的自触发/事件触发控制技术、多自由度解耦性能指标验证等方面的研究[33]。在样机研制方面已完成引力波探测惯性传感器交流静电反馈两自由度原理样机的设计实现,如图11所示。该原理样机在残余位移控制指标上仿真精度已达10-9量级,如图12所示。针对原理样机的性能指标测试,提出采用半物理仿真的形式,如图13所示,借助仿真手段,对惯性传感器的探头模块及位移传感模块进行建模,同时引入无拖曳控制模块,能够快速地获得关键性能指标的初步测试结果,有利于推动惯性传感器的模块化设计,加速研制进程。

图10 STM-EMRAC控制结构

图11 惯性传感器交流静电反馈两自由度原理样机
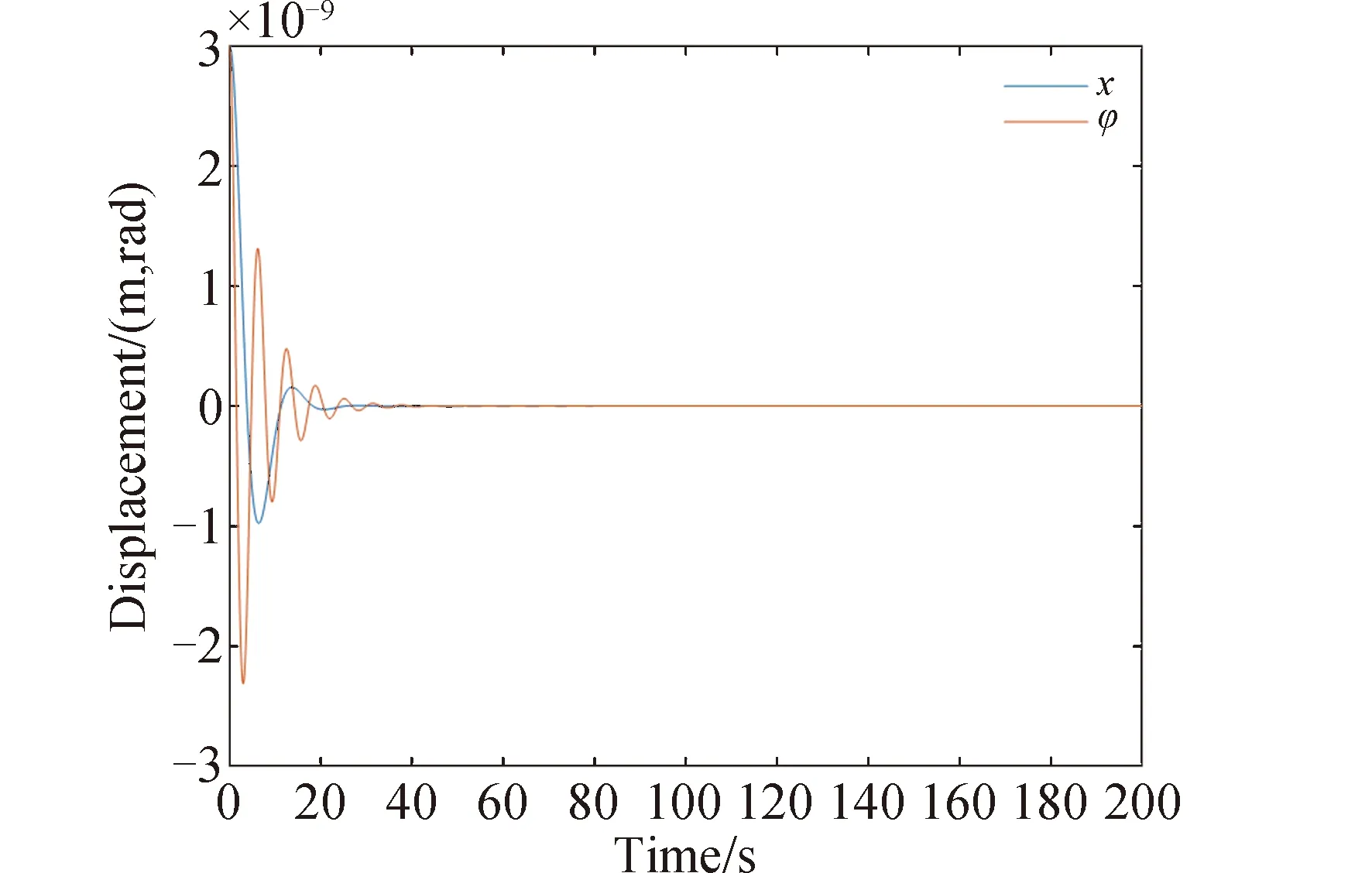
图12 惯性传感器两自由度残余位移仿真曲线
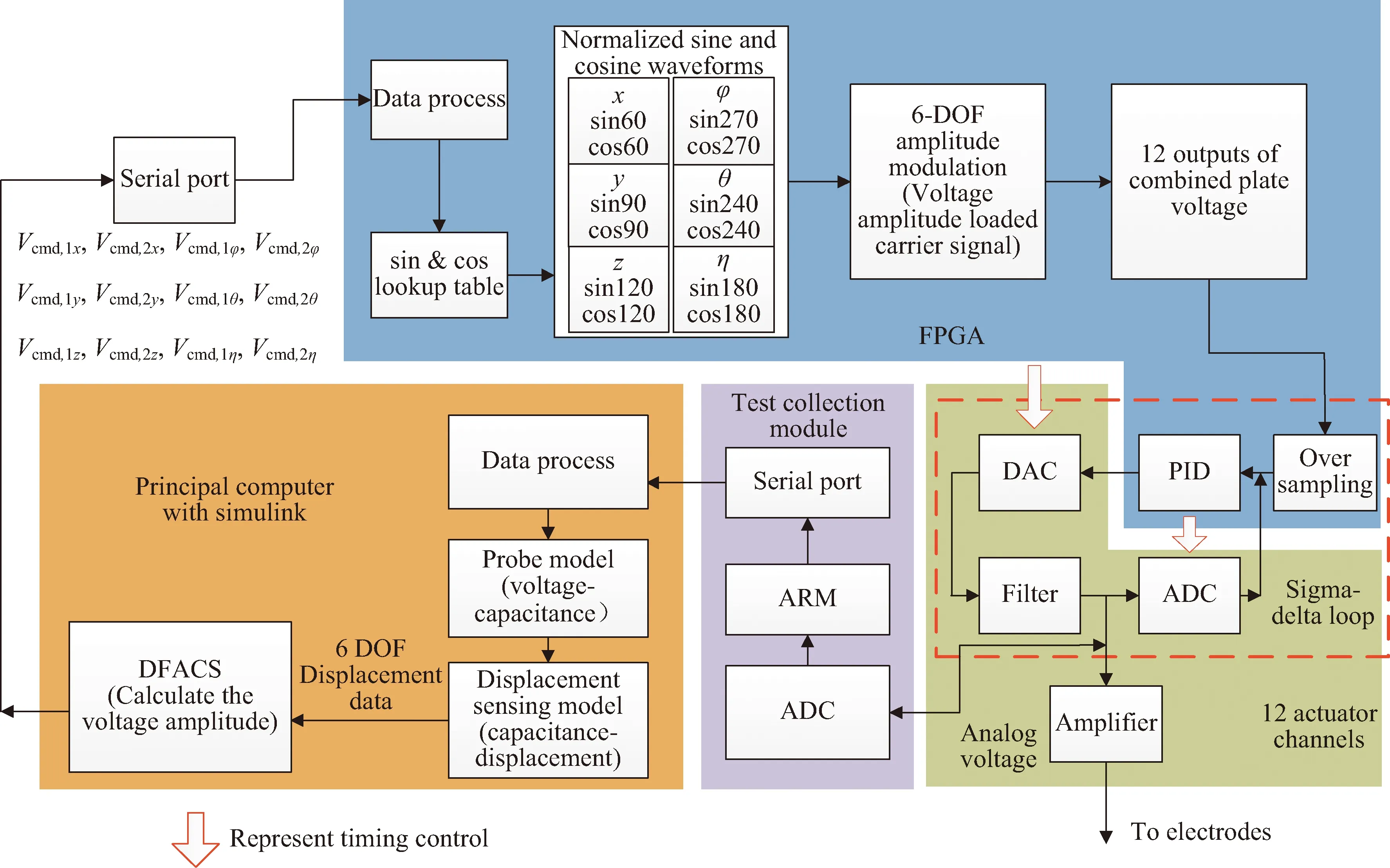
图13 半实物仿真方案设计
综上所述,空间引力波探测惯性传感器的设计研制是一项需要众多学科交叉协同的研究,吸引了国内外众多科研机构学者的关注。相较于其他空间惯性传感器而言,引力波探测惯性传感器的难点体现在超高精度和超低噪声上。要实现满足空间引力波探测需求的高精度空间惯性传感器,对现有的惯性传感器技术提出了很高的要求。从顶层设计到各组成部件设计再到测试环节都需要理论和工程上的创新。此外,惯性传感器的设计研制在大多数情况下可能由多个团队共同完成,每个团队结合自身优势,对惯性传感器的某一部件开展针对性的研究。在这一设计进程中,惯性传感器不同部件间的信号传递,输入输出关系,噪声的分配,单一模块如何完成总体指标的测试,例如仅有执行回路如何实现敏感轴残余加速度的测试,这些问题需要加以重点考虑。同时结合实际的研制及测试对理论上各部件的指标分配进行验证,根据实际的工程难度,对各部件的指标分配进行优化。由于惯性传感器设计总指标敏感轴残余加速度受众多因素影响,对于易于实现的需求,适当提高指标要求,对于工程上实现难度高的需求,可以考虑适当放宽指标要求,这有利于降低工程实现的难度并进一步加快惯性传感器的研制进程。
5 结论
本文讨论了空间惯性传感器的组成、工作原理及三大关键技术,梳理了国内外近年来对惯性传感器的研究进展。可以看到,空间惯性传感器是实现空间引力波探测的核心载荷,具有很多技术挑战,国际国内都在积极开展相关的研究和工程实现。随着中国空间引力波探测计划的持续推进,开展高精度空间惯性传感器研究与设计具有重大战略意义和科学意义,是中国有望赶超世界科技前沿或领跑世界科技研究的重要方向之一。本文认为,面向中国未来空间引力波探测任务中的惯性传感器需求,应该聚焦以下四个方面的研究。
1)惯性传感器控制体制策略研究。“天琴计划”对惯性传感器提出了在1mHz~0.1Hz频段敏感方向引入的残余加速度扰动小于1×10-15m/s2/Hz1/2的指标需求[4],这就对检验质量的控制提出了很高的要求,而惯性传感器检验质量具有非线性多输入多输出动力学耦合特性,外部多源扰动及噪声会影响对检验质量的控制精度。因此,高精度惯性传感器控制体制策略是一个至关重要的研究方向,将为惯性传感器的实际设计提供精确的设计指标。
2)交流执行机设计及参数优化。针对交流执行机需要设计合适的交流电压幅值、频率、相位。在实际设计时需要考虑众多的约束,如考虑信号频率的混叠效应、检验质量的执行刚度为常数、以及硬件电路实际设计时不同器件的性能,综合上述约束,如何通过优化的方法获得交流执行机的最优参数是一个有待解决的问题。
3)交流反馈多自由度解耦控制技术。控制检验质量的平动和转动时,极板上的交流电压在检验质量上产生的静电力包含耦合项,即控制不同自由度的电压信号会对同一个自由度上静电力同时产生作用。在精度要求较低的情况下,这些耦合项可以忽略,但是在高精度的设计需求下,直接忽略这些耦合项会造成控制精度的下降,特别在面向深空引力波探测过程中,对敏感轴的耦合加速度扰动要求小于1×10-15m/s2/Hz1/2,如何降低不同自由度之间的耦合干扰是一个值得深入探讨的问题。
4)惯性传感器低噪声技术。惯性传感器运行时会受到内部噪声及外部噪声的影响,内部噪声主要是设计时由于电路器件性能导致的,外部噪声主要包括热噪声、环境噪声、辐射噪声、布朗噪声等。这些噪声影响着惯性传感器的精度。为降低噪声对惯性传感器的影响,对于内部噪声,通过一些工程技术手段如自稳零斩波技术可以降低器件带来的噪声。对于外部噪声,对惯性传感器的影响主要体现在获得实验测量数据时会包含大量的噪声,因此需要对噪声来源进行分析,并建立相关数学模型,针对噪声模型,如何通过滤波技术将有用信号从大量的噪声中提取出来也是未来研究的方向。
