基于CH32 的双车无线充电系统设计和控制方法研究
2023-09-17董佳齐张欣周安康张恩溥
董佳齐,张欣,周安康,张恩溥
(天津工业大学 控制科学与工程学院,天津,300387)
0 引言
无线充电或无线供电技术是一种以无线电波或者电磁场为载体在自由的空间中对动力电池进行充电的技术[1]。无线充电技术的研究,源于19 世纪30 年代,迈克尔-法拉第发现电磁感应现象,即磁通量变化产生感应电动势,从而在电线中产生电流。无线充电技术,利用磁共振在充电器与设备之间的空气中传输电荷,线圈和电容器则在充电器与设备之间形成共振,实现电能高效传输。其中,磁耦合共振技术能够进行较远距离的电能传输,可以进行几厘米到几米的无线充电。除了有较远的传输距离之外,磁耦合共振方式还能够同时为多个设备供应电能,并且磁耦合共振方式最高能够达到90%以上的传输效率[2]。同时,无线充电技术具备重大的现实意义,电动汽车行业也在不断的快速发展之中。无线充电技术可以解决传统传导式充电面临的接口限制、安全等问题,因此有望逐渐发展成为电动汽车充电的主要方式[3]。
根据第十八届全国大学生智能汽车竞赛电能接力组比赛规则,本设计使用磁耦合式无线充电技术进行电能传输,设计了一套智能循迹双车电能接力系统。智能小车通过摄像头及电感辅助,通过使用连通域算法,进行智能循迹。在无线充电过程中,因为线圈漏磁产生电感会阻碍电能传输,因此设计了LCC 电路对此损耗进行补偿。此外在小车运行过程中通过Esp32模块与主控芯片CH32V307进行串口通信,通过UDP 数据透传协议与云端上位机Node-red 进行数据通信,以便进行显示。该系统对于智能小车和智能汽车的研究有较好的适用性。
1 系统整体设计
本系统以磁耦合式无线充电技术为研究依据,使用LCC谐振电路对充电过程进行补偿,结合编码器、摄像头等传感器,设计了一套可自动循迹并让后车通过无线充电技术给前车提供电能的双车跟随接力系统。
在硬件层面上,两车均以CH32V307单片机为主控芯片,以逐飞总钻风摄像头为传感器;前车以3010 舵机控制转向;两车之间采用沁恒CH573F 蓝牙模块进行通信;设计外围SPX2940T、RT9013-33、SY8205FCC 稳压电路对主控及传感器模块供电。以BTN7971 芯片设计驱动电路驱动电机;使用ESP32 模块通过UDP 数据透传协议与Node-red 平台搭建的云端上微机进行通信与人机交互显示。
在软件算法上,通过PID 算法控制小车运动的速度和方向,采用大津法(OTSU 算法)和连通域算法识别道路信息,可以在无人控制的情况下自动完成沿着道路寻迹。
2 系统硬件设计
■2.1 CH32V307 主控模块
主控模块的系统微处理器采用CH32V307型号单片机。CH32V307 是基于32 位RISC-V 设计的互联型微控制器,在本设计中,其承担了驱动摄像头、编码器等模块进行循迹以及驱动蓝牙模块进行两车通信的工作,并承担控制充电过程的启停的工作。
■2.2 蓝牙模块
通信模块使用沁恒CH573 模块,集成32 位RISC-V 内核微控制器,实现BLE 无线通讯。还带有低功耗蓝牙BLE通讯模块、高速USB 主机设备控制收发器、SPI、四个串口、ADC、按键触摸检测、RTC 等多种外设资源。模块集成度高,稳定性好,通信距离较长且信号稳定,可通过串口方式接收及发送数据,实现两车间的通信。
■2.3 驱动模块
本系统驱动模块选用BTN7971 芯片作为电机驱动电路核心,其耐压值为45V,可通过最大电流为80A,其本质为MOS 桥驱动电路,为防止输出电流反冲进入芯片,使用74LVC245 隔离芯片以隔离信号。
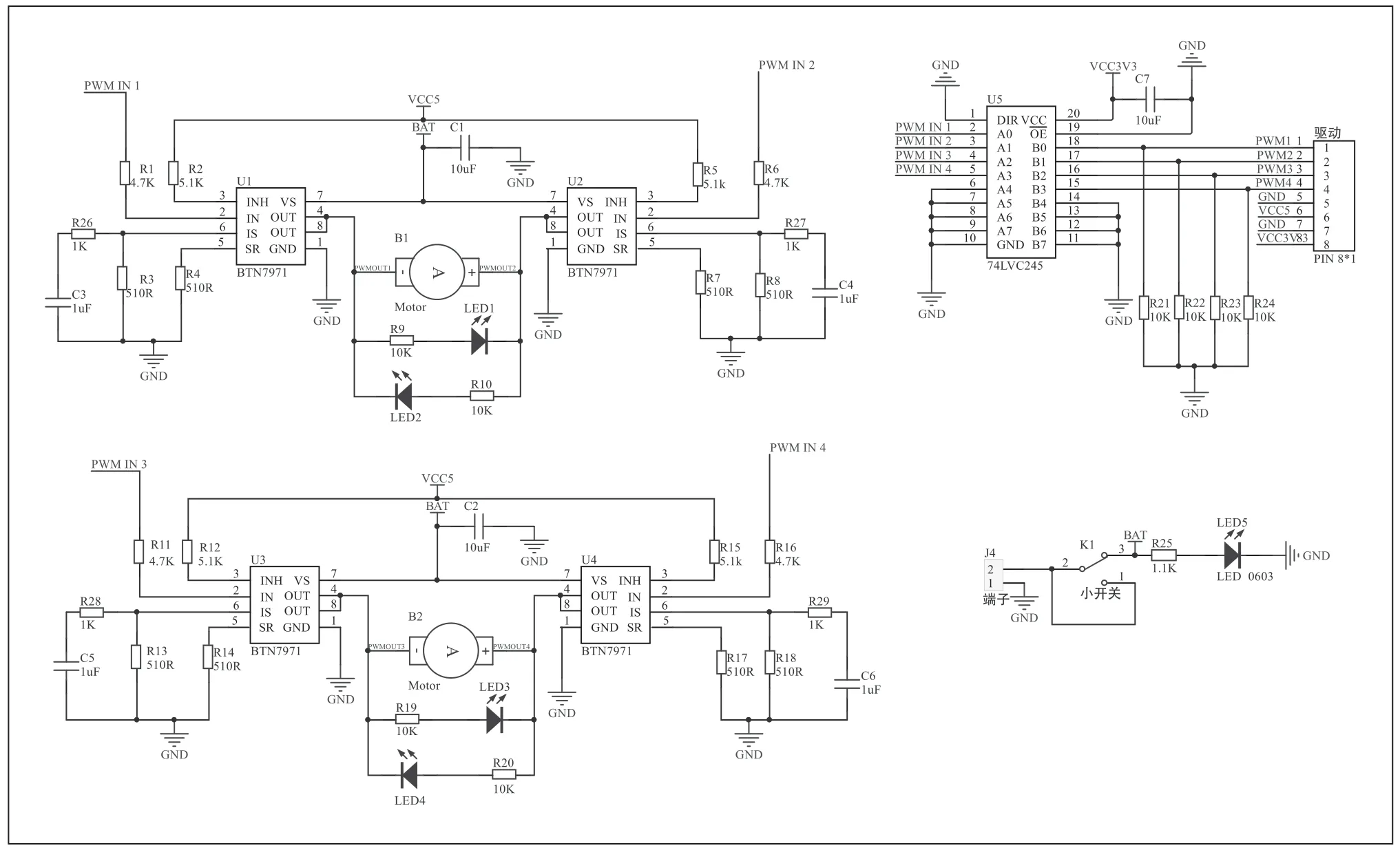
图2 驱动电路原理图
■2.4 稳压模块
由于主控板集成传感器较多,共设计了三种稳压模块对系统进行供电。其中5V 稳压模块使用SPX-2940T 芯片,SPX2940T 是一款低压差5V 线性稳压器,具有良好的特性。3V3 稳压模块使用RT9013-33GB 芯片,RT9013 是一款高性能、输出电流能力500mA 的线性稳压器,提供极高的PSRR 和超低压降。后车舵机稳压模块使用SY8205FCC 芯片,SY8205 是一种DC/DC 转换器,具有高效的同步降压的特点,输出电流可以达到5A。该芯片工作电压范围为4.5V到30V,并且带有RDS 极低的主开关与同步开关。三种稳压电路原理图分别如图3、图4 及图5 所示。

图3 电源5V 稳压电路

图4 电源3V3 稳压电路

图5 舵机电源电路
■2.5 传感器
2.5.1 摄像头
CMOS 摄像头体积小,图像获取可靠性高、稳定性高,功耗低,只需要3V3 电源供电。由于在智能车高速运行中,为防止图像失真的情况发生,对摄像头稳定性和可靠性要求较高,所以选用 CMOS 摄像头进行图像采集。
2.5.2 编码器
光电编码器是将输出轴上的机械几何位移通过光电转换转换为脉冲或数字量的传感器。它也是目前应用最广泛的测速传感器之一。具有信息获取准确、准确度高、应用简单等优点。
本系统使用的是1024 线增量式光电编码器,供电电源电压为3.3V 或5V,输出方波信号,将小车的当前速度送入单片机进行运算,通过PID 算法实现对小车速度的控制。
■2.6 无线充电电路
无线充电接收端采用LCC 谐振电路以实现较高的充电效率及较快的充电速度。为了避免超级电容过充,使用继电器接在接收线圈的两边,在充满电后将线圈两端短接,停止充电。同时设计了一个滞回电压比较器,通过该电压比较器设置两个切换点控制继电器工作。
无线充电接收端电路图如图6 所示。

图6 无线充电接收端电路图

图7 Node-red 信息流图
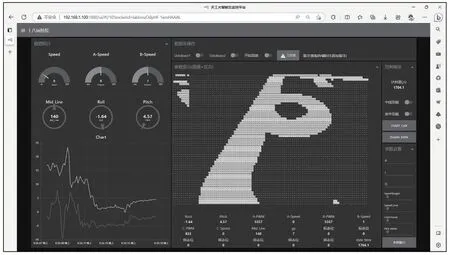
图8 Node-red 云端上位机界面

图9 无线充电双车实物图
3 系统软件设计
■3.1 速度控制算法
智能小车采用增量式PID 算法对速度进行闭环控制,通过编码器获取小车的当前速度并送入单片机进行运算,并通过PID 算法实现对速度的控制。
■3.2 图像识别算法
3.2.1 OTSU 大津法
本实验通过摄像头获取路面信息,并将获取的图像传给单片机进行处理后判断路面情况。
大津法(OTSU)是日本的大津展之在1980 年提出的。该方法的基本思想是:设阈值将图像分割成两组,一组灰度对应目标,另一组灰度对应背景,则这两组灰度值的类内方差最小,两组的类间方差最大[4]。
OTSU 算法假设是有一个阈值TH 可以将一幅灰度图像中的像素分成两组C1(灰度小于TH)与C2(灰度大于TH),这两组像素的均值分别为m1 与m2,整张图像的灰度均值为mG。并且像素被分为C1 或C2 组的概率分别为p1、p2。那么就有:
根据方差的表达式,类间方差表达式为:
将上式化简,将式(1)代入式(3),可得:
其中:
根据公式遍历全部的0~255 灰度级,求出使式(4)中最大的 k 值(使得类间方差最大的k 值)即为所求的阈值。
使用大津法可以将单片机获取到的图像进行二值化处理。
3.2.2 连通域算法
连通域在图像中通常是指像素值相同并且几何位置相邻的像素点所组成的图像区域。而对于二值化后的图像的连通域算法操作就是将黑色像素(在二值化图像和灰度图一般用“0”表示)与白色像素(在二值化图像中一般用“1”表示,在灰度图中用“255”表示)组成的二维像素点阵中相邻(4 邻域或8 邻域)的并对图像中不同连通域填写不同的数字标签,并且计算连接域的数量。该过程是计算机视觉和模式识别、图像处理中一个非常重要的基础操作,有着广泛的应用领域[5]。通过连通域算法对图像进行预处理后,我们从中提取出有效信息,即道路边界,来对其分析并与舵机方向控制系统相关联。通过道路边界信息进行一定的算法计算,可以得出图像道路的中线(最简单就是相加求平均),再通过最小二乘法可以估算出车身位置以及赛道趋势,再将其与舵机系统相关联,便可实现最基础的循迹功能并通过识别图像处理中的给出的不同元素标志,实现复杂控制。
4 Node-red 云端上位机系统
Node-RED 是IBM 开发的一种可视化编程工具,用于满足将硬件和设备快速连接到Web 服务和其他软件的需求,并已迅速发展成为一种用于物联网的通用编程工具。
在本系统中,通过将主控芯片CH32V307 中的小车数据信息流通过串口通信发送到ESP32 模块中,ESP32 模块通过UDP 数据透传协议的形式,将传输到本地服务器,注入Node-red 云端上位机系统之中。Node-red 平台通过对接收到的数据流进行处理,实现信息的可视化,为开发和应用提供的方便的调试环境。
对于Node-red 平台接收到的数据流,通过处理数据流分别接入对于云端上位机模块接口,可以分别对接收的不同信息进行不同方式的显示,可以便于开发者对于系统的监视和调试,并且具有很好的功能拓展性。
5 结语
本设计实现了在两辆智能小车均进行自动循迹的情况下,前车给后车通过无线充电技术提供电能的目的,最终得到了一套可自动循迹并让后车通过无线充电技术给前车提供电能的双车跟随接力系统。通过UDP 透传协议将数据流传输至Node-red 平台实现对系统的监控和调试。该设计初步进行了双车电能充电模型可行性的验证。为未来无线充电技术及自动驾驶技术普及后一种新型的道路救援模式提供了一个研究方向,在新能源领域有一定的推广和应用价值。
