无人机载双站干涉SAR系统关键技术分析与实验验证研究
2023-09-15朱金彪仇晓兰刘玉泉董勇伟上官松涛刘鸣谦
朱金彪 潘 洁 仇晓兰 蒋 雯 刘玉泉 董勇伟 李 威 蔺 蓓 倪 帆 上官松涛 刘鸣谦 程 遥
①(西北工业大学电子信息学院 西安 710072)
②(中国科学院空天信息创新研究院 北京 100190)
③(苏州市微波成像处理与应用技术重点实验室 苏州 215123)
④(中科宇达(北京)科技有限公司 北京 100190)
⑤(蜂巢航宇科技(北京)有限公司 北京 100071)
1 引言
干涉合成孔径雷达技术[1](Interferometric Synthetic Aperture Radar,InSAR)通过干涉处理获得地面目标的高度信息,可以实现高效率、大区域的地形测绘,自20世纪80年代提出以来,得到了飞速发展和广泛应用。
双站SAR[2]是一种收发天线分置于两个不同平台的SAR系统,是分布式多平台SAR的最简形式。由于双站SAR的两个平台理论上可以任意分布,因此双站InSAR系统可以突破单站双天线干涉SAR的基线限制,获得更加灵活的基线构型,满足不同应用场景的需求,具有很大的应用前景。
目前,国内外已经发射多个双站InSAR卫星星座,包括德国的TerraSAR-X/TanDEM-X和中国的陆地探测一号01组A/B星等。TerraSAR-X/TanDEM-X星座是国际上第1个星载双站InSAR系统,通过从相距几千米到仅200 m的编队飞行,在3年内获取了全球高精度数字高程模型(Digital Elevation Model,DEM)数据,相对高程精度达到2~4 m,绝对高程精度达到10 m[3,4]。中国于2022年发射的陆地探测一号01组卫星(LT-1),采用基于实时编队构形的三维姿态导引与控制技术,有效提升了双星长基线编队飞行时的空间同步性能;并采用非中断同步模式,解决了双站星载SAR成像和相位同步不能同时进行的难题,大幅提升了相位同步精度[5,6]。该组卫星将为地质灾害、土地调查、地震评估、防灾减灾、基础测绘、林业调查等领域提供强有力的支撑。
相比于星载双站InSAR,机载双站InSAR不受轨道的限制,也可以规避长波段易受电离层干扰等问题,在实际观测任务中有独特的应用优势。然而,机载双站InSAR存在航迹控制、空时频同步、运动补偿等难点,因此在国际上成功开展机载双站InSAR试验的报道尚不多见。目前仅有的报道是欧空局于2018年5-9月开展的BelSAR双站干涉实验。BelSAR[7,8]双站系统由两架搭载L波段全极化SAR的Cessna208飞机组成,在比利时临近Gembloux的BELAIR HESBANIA试验场进行了5次飞行试验,针对农业和土壤湿度开展了相关研究。国内在机载双站SAR系统、双站SAR成像等方面已有不少研究和实验[9-11],但机载双站InSAR系统和实验还未见报道。
近年来,随着SAR小型化技术和无人机技术的飞速发展,已经实现了无人机载重轨干涉SAR系统和无人机载双/多天线干涉SAR系统,其中无人机载重轨干涉SAR系统[12]受到时间去相干的影响,而无人机载双/多天线干涉SAR系统[13,14]则受限于载机平台体积和载重的限制,基线长度和构型配置不够灵活,在应用中受到局限。为此,利用无人机平台实现分布式双/多站干涉SAR系统是解决上述问题的有效方案,并且当前利用无人机平台实现无人机载双站InSAR已经成为可能。为了达到较高的高程反演精度,双站InSAR对时间和相位同步的要求非常严格[15-17],并且相比于星载双站InSAR和机载单站双天线InSAR而言,无人机载双站InSAR在同步技术及对应的补偿处理上均具有更大的难度。如何结合无人机载小型化SAR在体积、重量、功耗方面的限制要求,并结合高精度的同步误差补偿和运补成像处理技术,达到期望的干涉测量精度,是无人机载双站InSAR的核心难点。因此结合无人机载双站InSAR系统开展系统关键技术和相关数据处理方法的研究具有重要意义。
为了推进无人机载双站InSAR技术研究,中国科学院空天信息创新研究院牵头研制了一套拟达到0.5 m测高精度的无人机载L波段全极化InSAR系统,并于2022年8月17-29日在内蒙古达尔罕茂明安联合旗百灵机场开展了首次飞行实验,初步验证了系统的基本性能和指标。本文简要介绍了该系统的基本构成和主要性能并介绍了该系统的关键技术,给出了首次飞行实验的方案和实施情况,提出了无人机载双站InSAR的整体处理流程和方法,给出了实验数据处理结果,验证了处理方法的有效性和该无人机载双站InSAR系统的基本性能指标。
2 无人机载双站InSAR系统及关键技术
本文介绍的无人机载双站InSAR系统由两架固定翼无人机HC140组成载机编队,分别搭载L波段高分辨率全极化SAR(主站)和全极化接收系统(从站)。本节描述了该系统设计方法、系统构成和载荷参数,并重点介绍该系统的3大关键技术。
2.1 无人机载双站InSAR系统设计
本无人机载双站InSAR系统的设计主要包括确定临界基线、设计双站干涉SAR的构型(主要是入射角和基线角)和分配各项误差3个方面。
首先根据需要的空间去相干后的相干系数γg计算临界垂直基线Bv[18],
其中,λ为波长,R为斜距,θ为入射角,一发双收Q=1,自发自收模式Q=2,ρr为斜距分辨率。本无人机合适的飞行高度为2 km,同时为了使得同步链路通畅,两架无人机尽量保持同一高度水平分布,此时中心入射角设置为45°比较合理,能够兼顾地距分辨率和高程测量精度。在上述参数以及0.5 m分辨率的条件下,为了使得相干系数能够达到0.975以上,Bv需要不超过34 m。因此,此处设计34 m的有效基线,也即42.43 m的水平间距。
干涉相位噪声与相干系数的关系通常表示为[18]
其中,L为视数。当相干系数在0.97以上,视数大于16时,干涉相位噪声能控制在2.54°以内。对于双站InSAR系统而言,干涉相位噪声和相干系数还会受到空间同步误差的影响。如果主/从站存在较大的空间同步误差,使主/从天线波束覆盖范围有较大偏差,则观测区域内的天线增益会受到影响,从而影响从站的回波信噪比,使得干涉相位噪声变大。同时,波束范围覆盖的偏差,也会使得主站回波和从站回波的中心频率存在偏差,引起相干性的降低。为此,通常要求空间同步误差不能导致明显的中心频率偏差,不能明显降低多普勒处理带宽内的回波信噪比,如要求考虑空间同步误差后系统灵敏度优于-30 dB。本系统的灵敏度达-40 dB,对空间同步误差有较好的容忍性。
除了上述空间去相干和空间同步误差的影响外,系统设计中考虑的误差因素还包括由运动误差和航迹测量误差导致的运动补偿残余误差[19]、时间和相位同步误差、基线长度误差、基线角误差等。
将无误差的理想情况下的干涉相位、基线长度、基线角分别记为ϕ1,B1,α1。记ϕ2,B2,α2分别为考虑上述误差后的干涉相位、基线长度和基线角,则有
其中,∆φ1为运动补偿残余误差导致的干涉相位误差,其与航迹控制精度和成像处理时的参考高程与实际高程的偏差有关,具体模型参见文献[19],根据分析计算,当交轨向航迹控制精度优于1 m,成像参考高程精度优于100 m时,运补残余引入的干涉相位误差小于1°;∆φ2为同步链引入的干涉相位误差,其主要是相位同步引入的误差,时间同步主要影响回波数据的有效录取和回波包络的对齐,从而影响成像处理精度,间接影响干涉相位精度,本系统中时间同步引入的包络误差要求达到0.1个采样间隔内,基本不影响成像精度;∆φ3为去相干引入的相位误差,∆B为 基线误差,∆α为基线角误差。
考虑误差前后的目标高度表达式如下[18]:
其中,h1为理想情况下干涉反演的目标高度,h2为考虑多种误差因素后干涉反演的目标高度。因此,多种误差因素导致的目标高程误差为
若进一步考虑坡度影响,目标的高度可以表示为
其中,αp为坡度角,详见文献[20]。
基于上述误差分析模型,可以开展数值仿真,得到不同误差下对应的高程反演精度,从而得到可取值的误差范围,并根据实际系统工程可实现的精度进行折中考虑。本无人机载双站InSAR系统考虑的多种误差并进行误差分配后,理论上的高程反演精度情况如表1所示。

表1 无人机载双站InSAR系统误差分配Tab.1 Systematic error distribution of UAV-borne bistatic InSAR
2.2 双站干涉SAR系统构成
通过上述系统方案设计,本文无人机载双站干涉SAR系统的总体构成如表2所示,其主要由LSAR(主站)、L-接收系统(从站)、无人机双机编队及位姿测量系统4部分组成。SAR载荷的实物图如图1所示,将其挂载于无人机平台后整个系统的照片如图2、图3所示。

图1 双站干涉SAR及双向同步链实物图Fig.1 Bistatic InSAR and bidirectional synchronous chain

图2 主站L波段全极化SAR和双向同步链集成Fig.2 Master L-band full-polarization SAR and bidirectional synchronous chain integration

图3 从站L波段双极化接收系统和双向同步链集成Fig.3 Slave L-band dual-polarization receiving system and bidirectional synchronous chain integration

表2 无人机载双站InSAR系统总体构成Tab.2 Overall composition of the UAV-borne bistatic InSAR system
L-SAR(主站)、L-接收系统(从站)是无人机载双站干涉SAR系统的核心,该SAR载荷的主要参数如表3所示。

表3 L-SAR载荷参数Tab.3 L-SAR load parameters
2.3 系统关键技术
在无人机载双站干涉SAR系统的研制过程中,取得突破的主要关键技术包括以下3个:无人机编队飞行协同(也即空间同步)、时间与相位同步和无人机双站InSAR数据处理,下面将重点介绍这3大关键技术。
2.3.1 无人机编队飞行协同定位与控制技术
双站InSAR为实现0.5 m测高精度指标,要求两架分别搭载主站SAR和从站SAR的编队飞行无人机具备较高的空间同步能力,其交轨基线范围在20~50 m,且误差范围在3~5 m,双机顺轨间距不大于10 m。同时,在双机距离较近条件下,还会产生避撞等问题,这对无人机双机编队定位精度及定位可靠性提出较高要求。本文介绍的无人机双机编队从两个方面提高飞行定位精度,一是采用差分GPS模块将单机位置测量精度提高到3~5 cm;二是设计开发专用的协同传感器,在两架飞机上各安装一套,实现双机编队协同通信与飞行定位。通过采用双机编队实现双站InSAR要求的交轨基线及精度指标的方法,在国内尚属首次。
协同飞行定位与控制采用超宽带(Ultra Wide Band,UWB)定位技术[20,21],通过发送和接收具有ns或ns级以下的极窄脉冲来传输数据,使系统具有GHz量级的带宽。如图4所示,建立双向飞行时间方法,即每架无人机UWB定位模块从启动开始即会生成一条独立的时间戳,模块A的发射机在其时间戳上的Ta1发射请求性质的脉冲信号,模块B在Tb2时刻发射一个响应性质的信号,被模块A在自己的时间戳Ta2时刻接收。以此可以计算出脉冲信号在两个模块之间的飞行时间,从而确定飞行距离S:

图4 双向飞行时间法Fig.4 The method of two-way time-of-flight
其中,c为光速。
如图5所示,无人机A上设置UWB基站,无人机B上设置UWB标签。通过UWB算法计算出双机相对距离并发送给协同控制器。同时,协同控制器接收差分GPS模块信息,通过卫星定位信息计算出双机相对位置。

图6 长机-僚机编队横航向运动Fig.6 Leader-follower formation movement
其中,ω为长机的航向角速度。
协同控制器通过卫星定位获取双机编队的地理位置,通过UWB模块测距获取编队相对位置,最终通过融合算法,将卫星定位解算的双机相对位置与UWB解算的双机距离进行对比,形成UWB测距与差分GPS定位互为补充的测量方法,大幅提高了编队定位与控制精度,有效保证了空间同步。
其中,UWB测距和差分GPS定位的融合方法采用卡尔曼滤波器进行实现,具体来说,将UWB测距和差分GPS定位的测量结果作为卡尔曼滤波器的输入,通过卡尔曼滤波器对两种测量结果进行融合,得到更加准确的位置和速度信息。整个融合处理方法与流程如图7所示。
2.3.2 时间与相位同步技术
时间同步是无人机载双站InSAR系统的一个核心问题,指的是相互独立的主站与从站之间的时钟对准,或者时钟误差测量与补偿问题,它对主/从站获得数据的有效性至关重要[22,23]。相位同步是无人机载双站InSAR系统的另一个核心问题与关键难点,它直接影响了主站和从站复图像对的相干性和干涉相位的精度。
本文介绍的无人机载双站InSAR系统采用双向同步链[24-26]实现时间和相位同步。该同步链采用双站间信号对传的方案,即主站发送同步信号给从站后,从站经过一定的延时,发送从站的同步信号给主站,实现双向同步信号的传输,主从站各自记录同步信号供后续成像处理使用。图8为双站干涉SAR系统双向同步链的示意图。

图8 双站InSAR系统双向同步链示意图Fig.8 Diagram of the bidirectional synchronous chain of bistatic InSAR system
其中,双站SAR时间同步主要保证回波录取窗口的合理性和回波包络的正确性。本系统在回波录取窗口的触发上,则采用各自的晶振,按照固定的脉冲重复频率来触发。上述时间同步方法也是星载双站SAR系统中常用的技术方案,然而本无人机载双站SAR出于成本考虑,主站和从站晶振稳定度相对星载SAR而言要低几个数量级,本系统的晶振稳定度为10-7量级,因此需要额外考虑其时间同步对回波接收窗口的影响,并采取补偿措施。为此,本系统针对较低稳定度晶振下,随着开机后系统工作时间的增加,从站回波数据接收窗口相对主站而言存在时间漂移而影响有效回波的采集的问题,根据漂移量预设了一个以6.3 s为周期、1 µs为偏移量的回波录取窗口补偿机制,该机制会使得回波数据呈现锯齿状,如图9(a)所示。为此,本文在数据处理中,首先根据周期性的时间补偿机制将回波进行搬移补齐,使得回波包络连续。然后对主/从站记录的同步信号进行脉冲压缩和峰值相位提取,并对提取的相位作差得到差值的二分之一相位ϕsyn(t),对该相位进行线性拟合,即可得到主站和从站的晶振频差,如下:
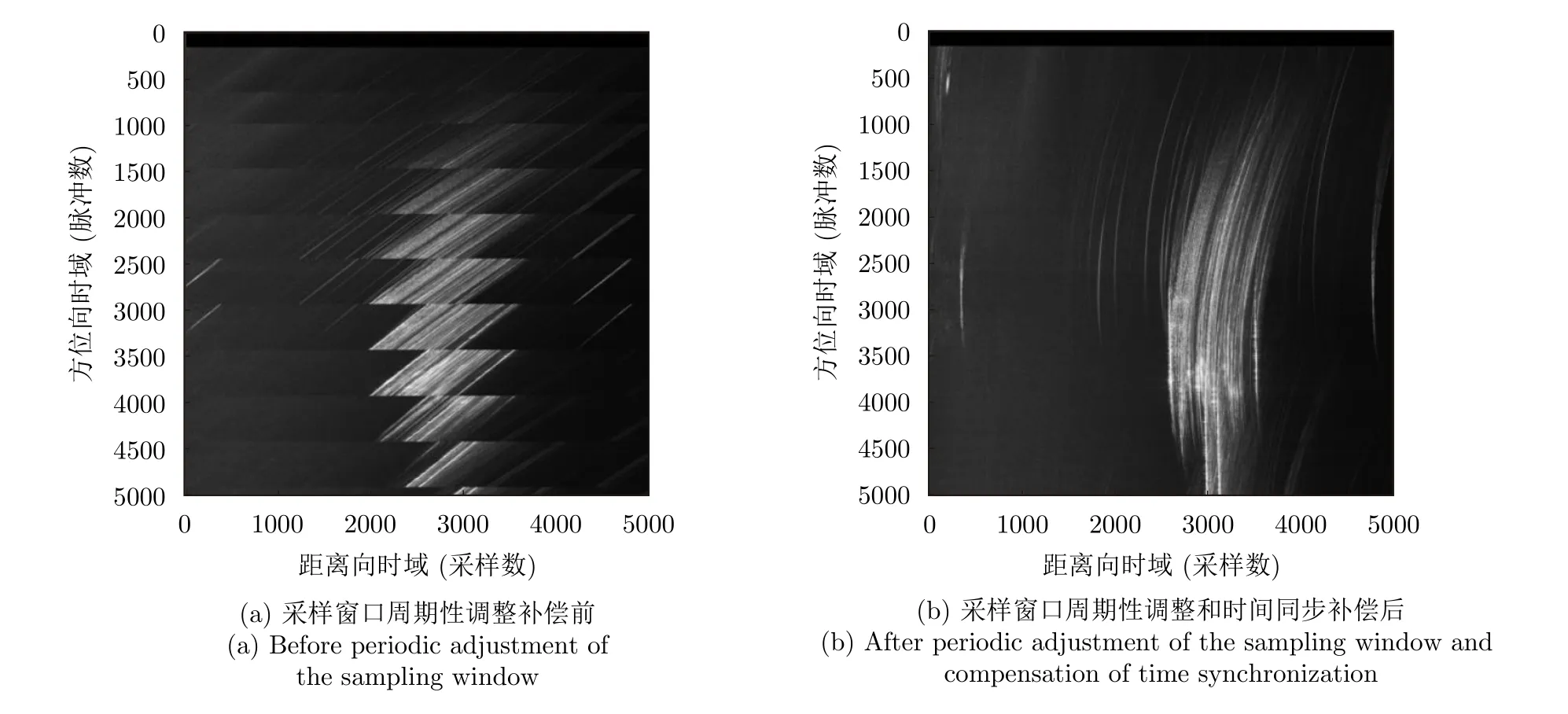
图9 从站回波距离压缩后的结果Fig.9 The results of range compression of the slave echo
据此对从站回波距离采样进行移位,也即在从站回波的距离频域补偿线性相位:
其中,t为以第1个回波脉冲方位时间为参考0时刻的方位时间,第j个回波脉冲的方位时间t=j/PRF,P RF为脉冲重复频率。由此即可得到回波包络误差补偿后的结果,如图9(b)所示。
在上述时间同步误差导致的包络误差补偿基础上,即可进行相位同步补偿,相位同步补偿的方法是分别对主站和从站接收的同步链信号进行脉冲压缩和峰值相位提取,并求两个相位的差值,其差值的二分之一就是同步相位的补偿项,用于补偿从站回波的相位同步误差。
图10为双站干涉SAR系统地面静态测量结果,其为采用双向同步链技术,从站雷达同步信号脉冲压缩并进行距离采样包络移位和相位同步误差补偿后的结果,其可体现同步链本身的精度。可见时间同步残余的包络误差小于0.1个采样点(采样率1.25 Gsps),即0.08 ns;相位同步补偿后残余的随机相位误差小于±0.4°。

图10 从站雷达时间和相位同步后的测量结果Fig.10 Measurements after time and phase synchronization of slave radar
2.3.3 无人机载双站InSAR数据处理技术
在同步误差补偿后,无人机载双站InSAR的处理流程与星载双站InSAR的后续处理流程[27]类似,包括主站和从站的成像处理、复图像配准、基线等干涉系统参数标定、干涉相位滤波解缠、DEM生成等步骤。其中,本系统有别于现有星载双站In-SAR处理方法的关键技术在于面向干涉的无人机载双站SAR的高精度成像处理。
由于无人机载SAR飞行高度相对较低,且易受到气流的影响偏离预定直线航线,从而形成相对较大的运动误差,同时主站和从站的运动误差并不相同,如果运动补偿不够精细,主站和从站所残余的不同的运动误差会带来相位误差从而影响干涉SAR高度反演精度。为此本文提出一种能够更好地补偿运动误差距离和方位空变性的运动补偿算法。
其首先基于主站和从站的高精度惯导数据通过最小二乘方法确定双站SAR共同的速度矢量,并拟合两条平行的直线。接着,采用一步运动补偿[28]算法以能够更好地应对运动误差随距离向的空变性。对于主站而言,运补参考航迹为主站拟合的直线;对于从站而言,则基于发射和接收两条参考航迹进行运动补偿[29]。随后对回波数据进行方位向重采样,对于主站直接基于主站惯导数据和主站回波脉冲时间戳进行方位重采样;对于从站而言,则采用双站SAR的方位重采样方法[22]得到准确的方位向重采样结果。接着基于一种多普勒带宽分割和子孔径图像合成的高精度运动补偿结合ω-k算法的成像方法,进行回波数据的运补和成像。该方法通过划分方位子孔径,对子孔径数据进行成像并采用PTA方法进行孔径内的运动补偿,最后对子孔径图像进行相干合成,可以更好地补偿运动误差的距离和方位空变性,更好地满足无人机载InSAR成像的要求。对于从站而言,由于基线较短,可使用主站和从站位置的中心作为双站SAR的等效中心位置,采用双站SAR的双曲等效近似模型进行ω-k算法推导,并采用与单站SAR一致的运补和成像方法进行处理。整个成像处理方法流程如图11所示。

图11 无人机载双站InSAR成像处理流程图Fig.11 Flow chart of UAV-borne bistatic InSAR imaging processing
3 无人机双站L波段干涉SAR校飞试验
在上述关键技术研究基础上,为了验证无人机双站L波段InSAR系统的基本性能指标、协同飞行交轨干涉基线范围以及系统高程反演能力,我们于2022年8月17-29日,在内蒙古达尔罕茂明安联合旗百灵机场开展了首次集成校飞实验。
3.1 实验对象
实验对象为百灵机场,由航站楼和机场跑道组成,占地面积391800 m2。其中,机场跑道区域长1200 m,宽176 m,周边人工建筑较少,地形平坦,比较空旷,除机场建筑等目标外,地物后向散射较弱,便于进行定标器布设。
3.2 航线及基线设计
双站InSAR为了兼顾航高限制、成像范围、最大不模糊高度、无人机航迹控制精度等因素,通过理论分析和仿真实验优选设计了两组飞行模式参数,模式1飞行相对高度1 km,双机飞行水平间距30 m,中心视角45°,成像幅宽为1.44 km;模式2飞行相对高度2 km,中心视角45°,双机飞行水平间距50 m,成像幅宽为2.88 km,如表4所示。

表4 双站InSAR构型参数Tab.4 Configuration parameters of bistatic InSAR
无人机实际飞行航线如图12所示,飞机右侧视观测,主要成像区间为图中自北往南和自南往北的两段航迹,其余用于无人机转弯和队形调整等。典型成像段的航迹和姿态测量数据如图13所示,可见,主/从站航迹控制较好,不仅两个航迹的一致性较好,且与理想直线航迹的偏差在1 m以内,满足本系统分配的航迹控制精度指标;主/从站各自的姿态角变化在2°以内,对多普勒中心频率的影响在10 Hz以内,说明其数据获取条件较好,姿态波动相对较小;主/从站偏航角存在1.7°左右的差异,该差异导致的中心频率差异约在3.5 Hz,对成像处理的影响在可接受的范围内。无人机载双站InSAR飞行照片如图14所示。

图12 无人机飞行航线Fig.12 UAV flight route

图13 无人机载双站InSAR飞行的典型航迹和姿态测量数据Fig.13 Typical trajectory and attitude measurements of UAV-borne bistatic InSAR

图14 无人机载双站InSAR飞行照片Fig.14 Photo of UAV-borne bistatic InSAR
3.3 定标器布设
为了支撑斜距、基线、通道幅相误差、极化等参数的标定和干涉高程反演结果精度的充分验证,本次实验中布设了21个定标器,其中:三面角14个(J1-J14),包括4个0.9 m三面角、3个0.7 m三面角,7个0.5 m三面角;二面角7个(J15-J21),其中3个0°二面角,3个45°二面角,1个22.5°二面角。这些定标器可以组成三组极化定标器组,每组1个三面角、1个0°二面角、1个45°二面角,另1个22.5°二面角用于判定模糊解,这些定标器用以支撑极化定标。此外,其余的11个三面角反射器部分用于干涉定标,其余则可用于极化和几何精度的验证。定标器布设的光学影像示意图及SAR图像中的分布图见图15,其中散射强度相对较弱的定标器在图15(b)中放大显示,场地中未标注的其他强散射点来自路灯、旗杆、指示牌等。典型定标器的现场照片见图16。采用差分GPS对上述定标器的三维位置进行了精确测量,三维位置精度为5 cm。需要说明的是,如表4所示,本文双站SAR实验中的双站角小于1°,而二面角、三面角反射器在俯仰向具有较宽的波束范围,因此其可用于本双站SAR实验的极化和干涉定标。

图15 定标器分布图Fig.15 Diagram of reflector distribution

图16 定标器布设照片Fig.16 Photos of reflector layout
4 无人机载双站InSAR实验数据初步处理结果
下面以2022年8月26日飞行的1000 m高度、水平间距30 m的实验数据为例,给出无人机载双站InSAR的处理结果。
4.1 双站InSAR成像结果
采用本文2.3.3节的同步误差补偿和运补成像方法进行成像处理后,得到主、从站的图像和分辨率测试结果分别如图17、图18和表5所示。

图17 成像结果图Fig.17 Results of imaging

图18 某三面角成像结果的方位向曲线Fig.18 Curve of trihedral corner reflector in azimuth in imaging results

表5 分辨率测试结果Tab.5 Results of resolution test
可见主从站图像都得到了良好的聚焦。但是,本次L波段SAR回波中存在点频和窄带干扰。此外,场景中机场建筑和其他地物散射强度差异悬殊,为了顾及地面角反射器和地面其他地物具有较好的信噪比,在系统增益设置时进行了折中,机场建筑强散射回波具有一定的饱和。这些因素导致成像后存在较长的距离向旁瓣拖尾现象,导致这些区域相干性较差,从而对其周边地物的干涉处理造成了一定的影响,但因其作用范围有限,不会对整体数据和结果的有效性造成影响。
4.2 定标处理结果
(1) 干涉定标
首先进行干涉定标处理[30-32],选择J1-J8共8个三面角反射器,标定干涉定标基线长度和基线角度分别为30.4764 m和-1.2729°。然后对干涉相位误差进行标定,通过对数据分析,判定干涉相位误差沿着距离向呈线性变化,画出所有21个角反射器的干涉相位与距离向像素位置的关系,如图19所示,可拟合得到误差变化的线性项和常数项分别为0.045(°/距离门)和162.647°。后续基于该参数进行补偿和高程反演。

图19 干涉相位误差与距离向像素关系Fig.19 Relation of interference phase error and pixel location in range direction
(2) 极化定标结果
基于布设的定标器开展极化定标处理并进行极化校正[33],以主站实验数据为例,给出Pauli伪彩合成图如图20所示。从伪彩图中可见,极化校正后,图中的裸地区域由原来的紫色变为了表征单次表面散射的蓝色,机场周围草地区域体现体散射的绿色,伪彩图颜色表现更加合理。

图20 极化校正前后的主站Pauli图Fig.20 Pauli diagrams of the master station before and after polarization correction
选择其中受杂波影响较小的三面角,对于极化标校前后的极化指标做测评,结果如表6和表7所示。可以看出,定标所采用的三面角反射器J2*的极化隔离度和幅相不平衡达到了理想状态,说明了标校算法的自洽性;从J3和J4两个检查点可见,经极化定标后,主站和从站极化隔离度均优于30 dB,极化通道幅度不平衡不超过0.5 dB,相位不平衡不超过3.5°,很好地满足了系统的设计指标。

表6 主站数据极化定标前后的三面角极化质量评价Tab.6 Polarization quality evaluation of master data before and after polarization calibration based on trihedral corners

表7 从站数据极化定标前后的三面角极化质量评价Tab.7 Polarization quality evaluation of slave data before and after polarization calibration based on trihedral corners
4.3 干涉反演结果
根据上述定标结果,进行干涉处理和高程反演[34,35]。首先选取主站数据和从站数据中机场区域(图21),进行干涉配准,配准后按照5×5窗口大小计算的相干系数图(图22)、干涉相位图(图23),去平地和滤波[36,37]后的干涉相位图(图24),相位解缠[38]和高程反演的结果(图25)。其中,21个定标点的高程值和高程误差统计结果如表8所示。经统计,全部21个定标点的高程误差RMS为0.87 m;考虑到部分定标点所在的位置受到干扰较多,相干系数较低,其相位准确性也受到影响,因此筛选相干系数大于0.88的定标器17个,统计高程误差RMS为0.42 m,达到系统干涉高程精度小于0.50 m的指标要求。

图22 相干系数图Fig.22 Coherence coefficient diagram

图23 相干相位图Fig.23 Interference phase diagram

图24 去平地和滤波后的相位图Fig.24 Interference phase diagram after flat-earth phase removal and filtering

图25 反演的高度Fig.25 Elevation inversion

表8 双站SAR干涉反演高度误差表Tab.8 Table of elevation inversion error of bistatic interferometric SAR
此外,对机场附近有两个小土丘的区域(图26)进行处理,得到初始干涉相位、去平地并滤波后的相位如图27和图28所示,最终得到的高程反演结果如图29所示,可见其很好地体现了该区域的高程变化,验证了本无人机双站InSAR系统在地形测量方面的有效性。

图26 机场附近小土丘区域图像Fig.26 Image of the hill near the airport

图27 干涉相位图Fig.27 Interference phase diagram

图28 去平地及滤波后的干涉相位图Fig.28 Interference phase diagram after flat-earth phase removal and filtering

图29 高程反演结果Fig.29 Results of elevation inversion
5 结语
本文介绍了国内首个无人机载双站InSAR系统的组成、基本参数和关键技术,并给出了首次飞行试验的实施情况和数据处理结果,验证了该系统的基本性能和高程反演能力,为后续多航空平台协同开展分布式干涉、分布式阵列干涉三维成像数据获取及处理的研究提供了技术基础。
在国家重点研发计划等项目支撑下,项目团队后续将进一步开展复杂地形区域的无人机载双/分布式InSAR数据获取和处理技术研究工作,并继续开展试验数据的处理和指标评估工作,推动无人机载双/分布式InSAR的实用化。
致谢本论文成果是在国家重点研发计划航空协同透视探测技术系统(2022YFB3902600)以及中国科学院空天信息创新研究院自主部署的颠覆性创新项目“无人机双站L波段干涉SAR探测系统”支持下完成的,感谢研究过程中为我们提供支持的各位专家、老师。
