杂波背景下机载雷达信号参数的射频隐身优化
2023-09-15钟永磊
钟永磊
(南京国睿防务系统有限公司,江苏 南京 210039)
0 引言
机载雷达在探测地面目标或海上目标时,主要依托多普勒特点对不同目标测算方式,获取探测目标位置。为了保证海面或地面目标探测的效率,可基于稀疏傅里叶变换检测算法提高目标探测效率,但需预先设定信号稀疏性。在目前的杂波研究中,有学者借助目标和背景间的多普勒特征差异性,将采集到的数据进行时频分解重构处理,基于迭代获取近似值,提取目标数据,从而得到杂波抵抗方法。对于移动速度缓慢或静止的目标,除了采用成像方法提取目标外,还可以使用CFAR算法进行分析。近些年,研究人员不仅对检测器和CFAR进行设计,还从波形、空间与极化分集等角度提升机载雷达勘测能力。但现有研究均没有将机载雷达运行阶段的射频隐身性能作为设计指标。本研究将机载雷达射频隐身需求引入机载雷达探测地面或海上目标中,分析杂波散射系数对机载雷达射频隐身性能的影响。
1 机载雷达信号影响因素
机载雷达探测距离是衡量其性能的主要数据,影响雷达探测距离的因素包括机载雷达发射出来的能量及能量传播在环境中的损耗,这是因为机载雷达主要借助目标散射的回波能量实现对目标的探测。
1.1 大气损耗对探测性能的影响
大气内部小分子对电磁波的吸收或折射对机载雷达传播信号有一定影响。地球大气从地面开始到15 km范围内均属于对流层,机载雷达飞行高度在1~10 km,所以大气对电磁波的衰减和对流层相关。研究表明,大气气体损耗和电磁波波长及机载雷达传输距离相关。若机载雷达在天气晴朗的条件下探测目标,此时大气对电磁波的损耗来源于气体分子,在UEF波段和X波段之内,电磁波衰减比0.012 5 dB/km小。若机载雷达在冰雪天气时探测目标,电磁波受雪和冰的影响较小,电磁波衰减微乎其微[1]。若机载雷达在雨雾天气中工作,大气中空气湿度较大,且水分主要以液态的形式呈现,此时电磁波衰减最为显著。机载雷达发送的电磁波在雨水中衰减速度和含水量相关,雨的大小不同,电磁波衰减速度不同。当频段为VHF时,小雨状态电磁波损耗率为2.81e~7 dB/km、中雨状态电磁波损耗率为3.39e~7 dB/km、大雨状态电磁波损耗率为4.69e~7 dB/km、暴雨状态电磁波损耗率为5.21e~7 dB/km。当频段为UHF时,小雨状态电磁波损耗率为7.74e~6 dB/km,中雨状态电磁波损耗率为1.34e~5 dB/km,大雨状态电磁波损耗率为3.44e~5 dB/km,暴雨状态电磁波损耗率为4.68e~5 dB/km。当频段为L时,小雨状态电磁波损耗率为5.53e~5 dB/km,中雨状态电磁波损耗率为1.18e~4 dB/km,大雨状态电磁波损耗率为4.3e~4 dB/km,暴雨状态电磁波损耗率为6.56e~4 dB/km。
1.2 机载雷达杂波成分
机载雷达杂波就是干扰机载雷达正常运作的非期望信号回波,包括非目标物体反射的回波,如树木、地表、海面、波浪等反射的回波。针对参数固定的雷达,机载雷达海杂波强度和地海面粗糙度和介电特性相关。机载雷达探测地面或海上目标时,机载雷达波束向下辐射所照射的区域为椭圆形。如果雷达天线和地海面夹角呈现为掠射角,低掠射角探测海面目标时,受椭圆长轴跨过的距离影响,杂波辐射区域被机载雷达分割为多个单元[2]。当海杂波十分严重时,目标物体的回波很可能被杂波淹没,机载雷达无法接收到需求信号,从而无法辨别目标真实位置[3]。
1.3 杂波对目标探测的影响
传统机载雷达探测目标时,通常采用固定门限的检测模式,也就是假设干扰电平作为已知且恒定的常数,依照干扰电平设定虚警概率检测门限,从而获得探测目标的具体位置。但在实际探测中,干扰电平并非固定的常数,这导致实际的虚警概率存在较大的波动[4]。当杂波平均功率增量在10 dB以内时,虚警概率和雷达期望虚警概率的比值变化幅度较大,此时为固定检测门限。假定杂波平均功率出现变化,虚警概率会在大范围内改变,从而降低探测的准确性。在这种条件下,即便杂波的信噪声较大,也没有办法检测到正确的目标信号。
2 杂波背景下机载雷达信号参数的射频隐身优化
2.1 地面移动目标脉冲对消
如果目标处于移动状态,可借助多普勒信息对移动目标进行检测,达到改善信杂比的目的。从脉冲对消的地面移动目标检测入手,借助脉冲多普勒技术提取目标移动数据[5]。脉冲对消滤波器使用延迟对消的方式,如图1所示。如果参与对消的脉冲个数为n,延迟对消需要n-1次脉冲对消滤波器。
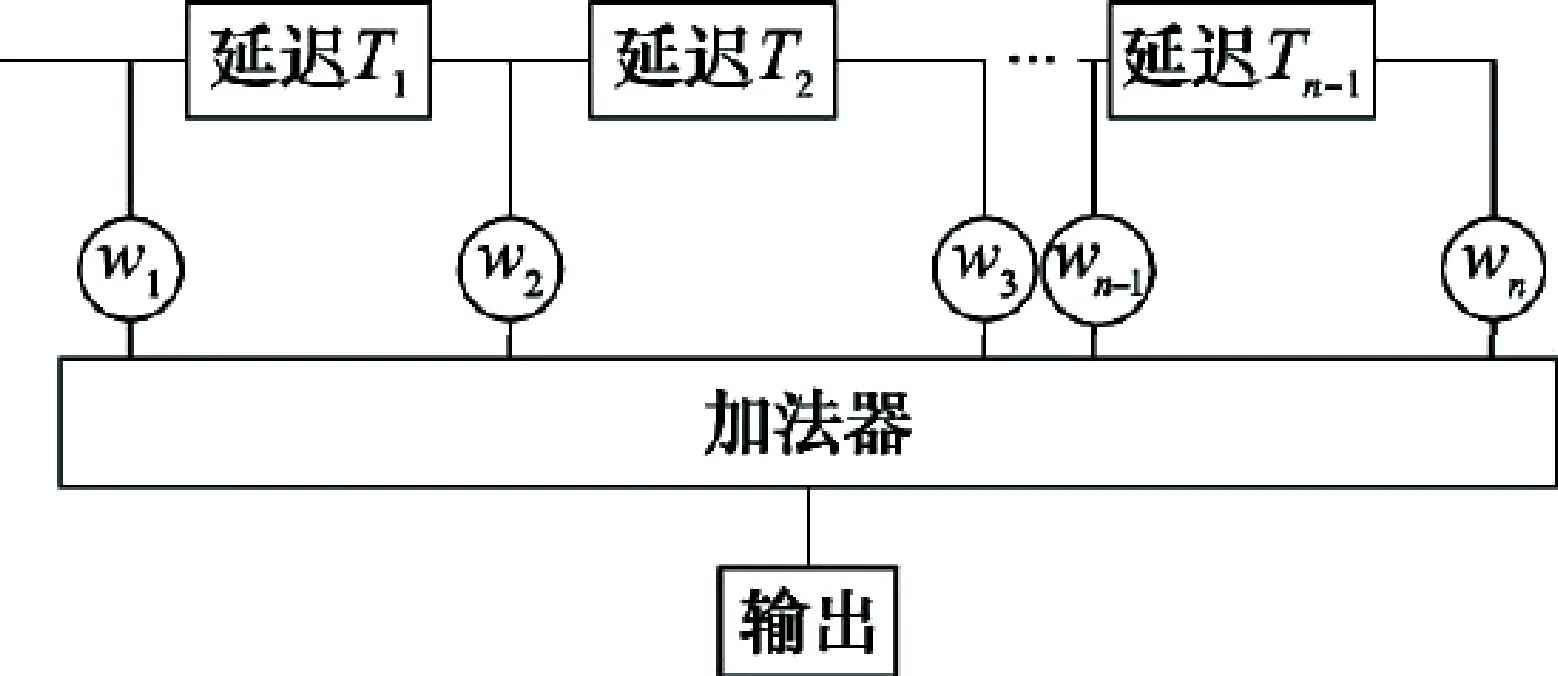
图1 脉冲滤波器结构
通过改善因子分析多普勒滤波对信杂波的影响效果。脉冲对消无法对噪声做出回应,因此如果脉冲对消改善因子较大,则检测设备性能与噪声限制情况相近;如果杂波功率宽度十分窄小,可将改善因子用脉冲周期的形式表示,避免机载雷达受杂波影响。经过脉冲对消处理后,目标回波幅度数值呈现出增大趋势,同时脉冲对消改善因子存在最佳数值。图2中对一阶段、二阶段、三阶段脉冲对消滤波器的归一化幅频响应,图2中f表示多普勒频率[6]。从图2中可以了解到,脉冲对消滤波器对多普勒频移近似情况为零时,可取得最为良好的杂波控制效果。在杂波消除设备特殊的持续增加下,脉冲对消滤波会变得很窄。杂波功率谱保持恒定时,窄小的通道可以提高杂波改善因子,但会将部分目标信号过滤掉,影响探测精度[7]。
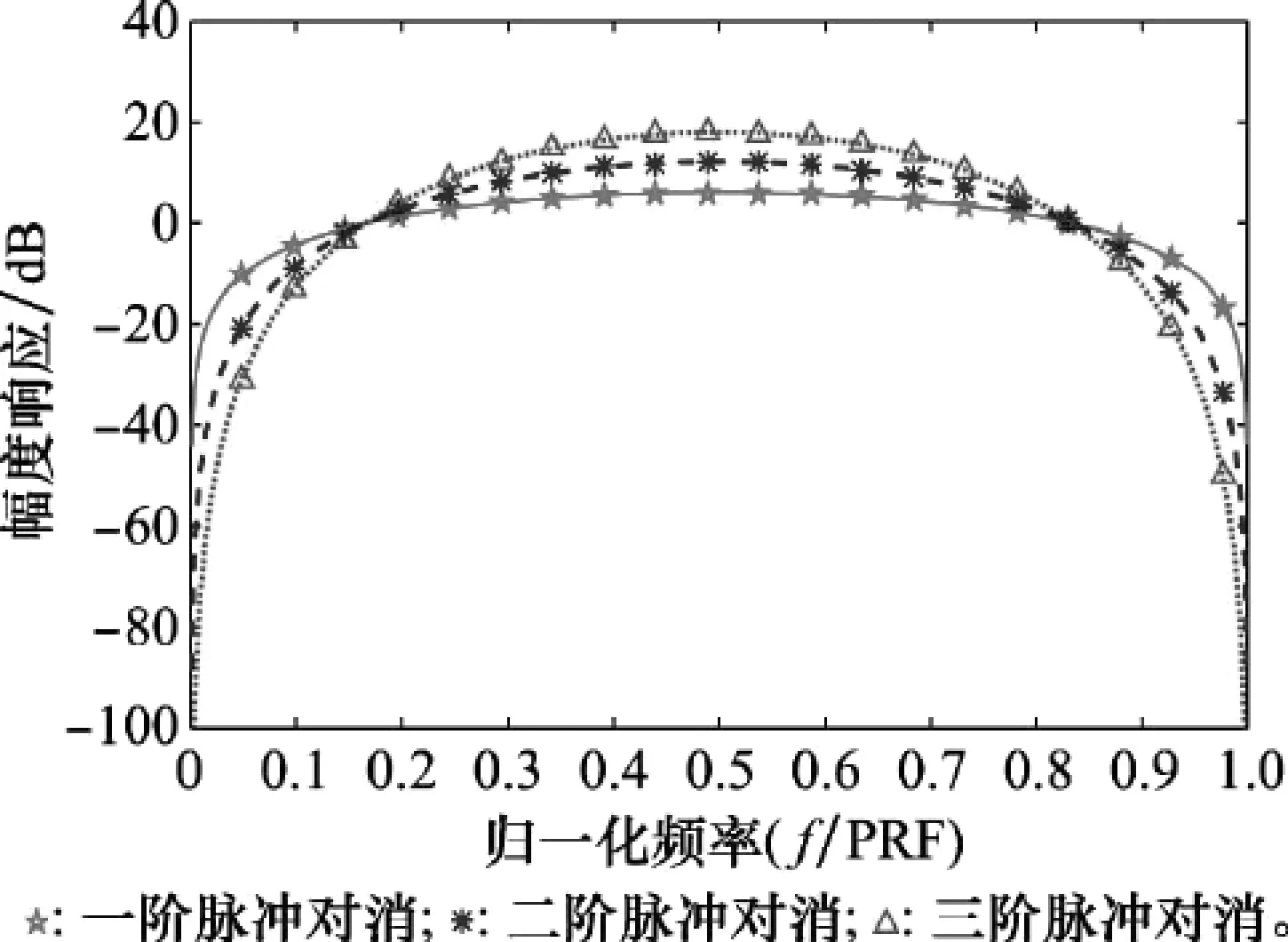
图2 幅频响应
2.2 基于射频隐身的地面移动目标探测
当机载雷达受地面杂波影响时,机载雷达目标回波信号经过脉冲对消处理后,产生的信号与杂波比例会比雷达最小可检测到的信号与杂波比例要小。为了得到最大的信杂比,依照机载雷达探测距离,可以对信杂比的约束项进行更改。射频隐身隐含的限制条件是脉冲重复周期。机载雷达照射目标的角度确定以后,其与待测目标的距离与波束覆盖区域呈正比关系,与信号和杂波比例呈反比关系。根据以往经验,可用移动参数代表驻留时间约束项的非优化参数,从而得到机载雷达射频隐身工作过程中的优化目标[8]。
2.3 基于射频隐身的海面目标检测
海杂波的平均多普勒射频移动很少为零,机载雷达探测目标和杂波在多普勒频谱上容易呈现出重叠趋势,所以适用于地面杂波的脉冲对消滤波并不适用于海面目标。原因是运用地杂波脉冲对消滤波时会出现多个虚警。对于海面目标勘测,可使用CFAR进行分析推导的方法得出海杂波条件下机载雷达信号参数的射频隐身优化模型[9-10]。针对地杂波复杂的射频隐身模型,两种场景下使用的雷达均为脉冲形式,区别是机载雷达对杂波的处理方式不同,除了SCR约束外,其余约束基本相同。
3 仿真分析
在对地杂波与海杂波条件下的脉冲雷达参数的射频隐身优化效果进行分析,采用遗传算法对优化模型进行求解时,可将目标函数作为适应数值,优化数据时采用二进制编码的方式,将变异概率设置为0.001,最开始的种群数量为200个,共进行5 000次迭代,从而分析射频隐身性能。
3.1 地杂波条件下机载乐达信号参数射频隐身优化分析
如果地杂波散射系数为-25 dB时,目标RCS为5 m2,最小探测距离为41 km,极限驻留市场为1 s,样本选择最为合适的适应度是0.36,也就是目标函数数值为0.36。当目标函数数值比1小的时,可以代表机载雷达满足射频隐身的基本条件,最佳个体为9.92 dBw,最佳个数为996。按照这些参数设计机载雷达不同距离的目标探测概率以及相同距离的无源截获概率。如果探测距离在20 km以内,机载雷达对无源探测概率明显比无源对机载雷达的截获概率要高。在60 km的位置,机载雷达发现概率为0.97,无源截获概率仅为0.006,意味着机载雷达具有十分优异的射频隐身功能。
假设散射系数为-25 dB,在对不同RCS大小的目标进行探测时,如果雷达最小探测距离发生改变,求解得到的最优个体和与之对应的截获因子变化趋势,如图3所示。如果RCS为0.3 m2,探测距离大于130 km,截获因子表现为无穷大。从图3中可以看出,目标RCS比0.3 m2小时,没有具备射频隐身功能的机载雷达参数,同时截获因子伴随着距离的增大逐渐变化,伴随着RCS的减小不断变小,可推断出目标RCS比0.3 m2大时,探测距离在一定区间内机载雷达存在射频隐身功能。
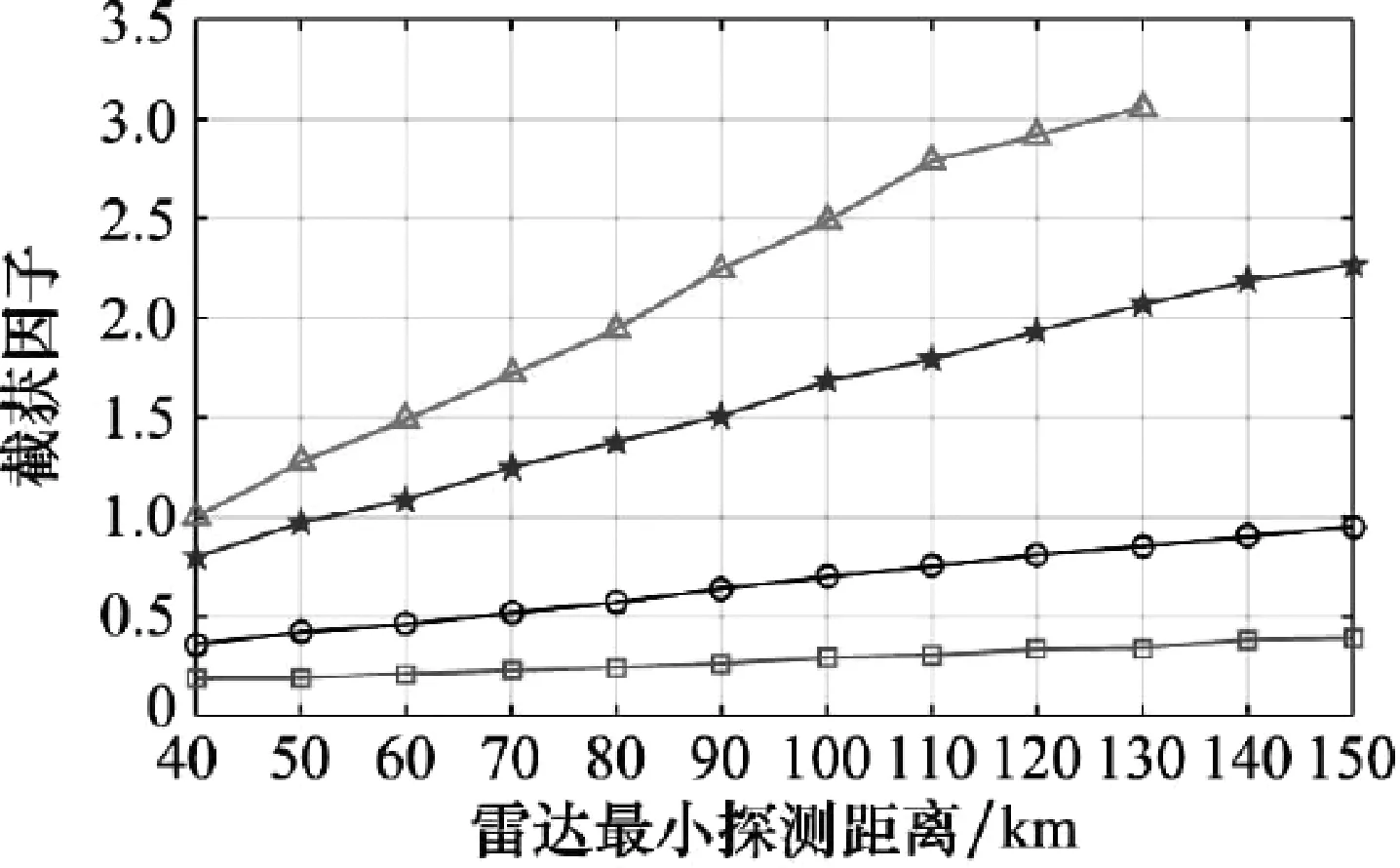
图3 地杂波下目标RCS和截获因子的关系
3.2 海杂波条件下机载雷达信号参数射频隐身优化分析
如果海杂波散射系数为-30 dB,目标RCS为1 000 m2,最小探测距离是41 km,极限驻留时长为1 s,可以从样本中找到最优的个体适应度,也就是0.087 4,目标函数最优数值为0.087 4。当距离在10 km以内时,机载雷达与无源相互之间均能发现对象的存在。机载雷达勘测距离在10 km以上时,机载雷达无源探测概率高于无源对机载雷达的截获概率,同时机载雷达在距离为40~100 km时发现目标的概率为1。此时,无源对机载雷达的截获概率为零,可认为机载雷达存在优异的射频隐身功能。
假设目标RCS大小为1 000 m2,对不同海杂波散射系数下的射频隐身性能进行分析。如果雷达最小探测距离不断变化,通过模型求解可获得最优质的适应度。杂波散射系数越小时,机载雷达射频隐身性能更佳。如果杂波散射系数为-35~-30 dB,最优质的的个体对应的截获因子处于恒定趋势。除此之外,如果雷达最小探究距离在4~180 km,杂波散射系数在-22 dB条件下时,可满足射频隐身需求的雷达信号数量。
4 结语
本研究对杂波条件下机载雷达信号参数射频隐身性能进行分析,探讨了适用于地杂波和海杂波的雷达信号,并对机载雷达射频隐身进行仿真分析。目前,杂波条件下机载雷达信号参数优化受多种因素影响,如杂波中草丛的多普勒宽度、海情变化等,这些影响因素均需要进行深入的探讨。
