分布式涵道风扇对BWB无人机气动特性的影响研究
2023-09-14梁良钟伯文江善元张嘉策王高
梁良 钟伯文 江善元 张嘉策 王高
摘 要:由于分布式推进翼身融合(BWB)无人机综合性能显著,是未来航空领域飞行器发展的趋势, 因此分析分布式BWB布局无人机的气动特性对于进行分布式BWB布局设计有着重大的基础意义。本文运用计算流体力学(CFD)数值模拟计算,利用混合网格技术和k-ω SST湍流模型求解雷诺平均Navier-Stokes(RANS)方程的方法,研究了有/无动力、涵道展向位置以及涵道间距等参数对全机在巡航状态下的气动影响。研究表明,在相同工况下,有分布式动力能够提升全机的气动特性,且外翼段是提供升力的主要方式;涵道风扇合理的间距能产生更好的诱导增升效果,表现为在小迎角下,全机升力系数随涵道间距的增加先增大而后几乎保持不变;在大迎角下,随着涵道间距的增加,全机升力系数逐渐提升,其最大增量为9.3%。以上对此类飞行器的研究分析对分布式推进BWB无人机气动布局设计具有一定的参考价值。
关键词:分布式动力; 多参考系方法; 涵道风扇; 翼身融合; 气动特性
中图分类号:V211.3 文献标识码:A DOI:10.19452/j.issn1007-5453.2023.05.004
尽管燃油动力推进技术已非常成熟,且具有长续航能力、大载荷能力的优点,但近年来随着航空科学技术的不断提高,航空器的噪声、环保、油耗等问题受到普遍的重视[1]。常规的燃油飞机已无法满足对于飞机更低油耗、绿色清洁、更高效率的要求,所以发展绿色航空显得至关重要[2]。电推进技术可以看作目前绿色航空的解决之道,而分布式电推进技术将是各国的重点研发领域[3-4]。
相比于常规布局无人机,分布式涵道风扇翼身融合(BWB)布局无人机能够为飞机提供更好的气动性能。而且翼身融合无人机由于具有结构轻、容积大、阻力小,以及提升燃油效率等方面的优势而获得研究者广泛的关注[5-7]。如美国国家航空航天局(NASA)于2009年提出的“N+3”方案,其目的是到2035年将其飞行器的总耗油量下降60%[8],目前,NASA又联合波音等机构,提出了分布式推进技术和带有边界层吸入(BLI)的BWB布局耦合设计的计划[9-10],研究结果表明该设计将使推进系统效率增加2%。
对于分布式动力布局,国内外学者进行了许多研究工作。Giuliani [11]对以涵道风扇为动力系统作用下的边界层吸入进行了数值模拟研究,进一步探讨了BLI效应的流动机理。Wick等[12]通过把翼下布局的分布式动力系统和常规布局进行比较分析,深入研究了动力系统的数量等参数对飞行器气动特性的影响。 A. T. Perry等[13-14]通过试验与数值模拟相结合的方法对翼上分布式涵道布局的气动特性进行了研究,并验证了BLI效应的有效性,然后深入研究了机翼与涵道间的气动干扰问题。王科雷等[15]采用试验与数值模拟相结合的方法对分布式BWB无人机纵向气动特性及失速机理展开分析和研究。张阳等[16]运用数值模拟方法,探讨了分布式涵道系统的尺寸参数、总推力大小对全机在起飞/巡航状态下气动特性的影响。综上所述,绝大多数研究集中在分布式动力BWB无人机巡航状态下的结构、气动等方面展开,而在分布式动力系统布局方面的研究中,几乎很少涉及分布式涵道间距对无人机气动特性的影响分析。而且以往研究中对分布式涵道系统做了简化处理,用薄桨盘代替桨叶,这会忽略涵道风扇内部桨尖涡造成的气动干扰问题。
本文以低速巡航状态为研究背景,运用多参考系(MRF)方法分别对有/无动力构型、涵道展向分布位置,以及涵道間距等不同参数BWB无人机在巡航状态下的气动特性进行分析研究。
1 几何模型及数值模拟方法
1.1 分布式涵道翼身融合无人机几何模型
本文以飞行高度H=500m、远场来流速度v=10m/s(Ma= 0.029)、涵道风扇转速为12000r/min、迎角范围为-4°~24°的分布式BWB无人机为研究对象,其几何构型如图1所示。该布局由内翼段、外翼段、翼尖以及涵道动力系统组成。其中,分布涵道风扇系统由6个涵道风扇组成,风扇由8叶桨构成,涵道动力系统位于内翼段且紧贴机体后部表面并沿着展向布置,涵道桨盘中心之间的相互距离d=130mm,涵道桨盘中心距离翼弦弦长高度h=70mm。无人机的基本参数见表1。

1.2 数值模拟方法

涵道风扇动力系统采用MRF方法进行数值模拟,计算域主要由旋转域和静止域两个子域构成。在进行迭代运算的过程中,将相邻两个运算区间的通量差进行插值交换,实现两个计算区域间模拟数据的统一。MRF方法主要是把所在旋转区域内的内部流场简化为桨叶在某一区域的瞬时内部流场,从而将非稳态问题转化为一种稳态问题来解决,因此采用MRF方法进行数值计算可节约计算量、提升运算效率[20]。
2 模型及网格无关性验证
2.1 算例验证
2.1.1 涵道螺旋桨验证
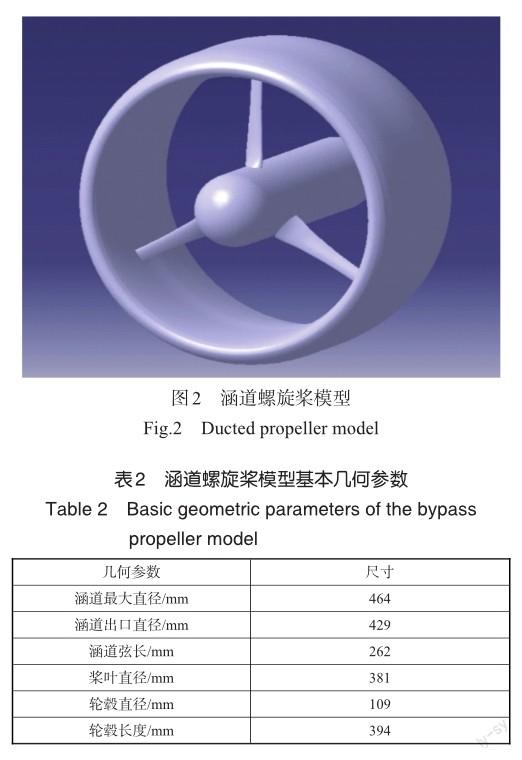
为了验证本文使用的MRF方法的可靠性,使用NASA涵道螺旋桨的风洞数据加以验证[21]。该涵道螺旋桨由三叶桨构成,桨叶翼型为NACA6412,试验转速为8000r/min。几何外形如图2所示。表2所示为涵道螺旋桨的基本几何参数。
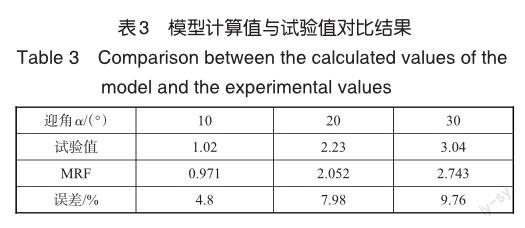
本节采用MRF方法对该模型进行数值计算。计算域采用Poly-Hexcore混合网格划分,相比四面体网格,数量减少60%且网格质量更好,网格规模大约为150万量级,其中旋转域网格数为100万个,静止域网格数为50万个。远场自由来流速度为30m/s,对涵道螺旋桨在来流迎角分别为10°、20°及30°条件下进行数值计算,其升力系数计算结果与试验值对比见表3。能够看到MRF方法计算得到的升力系数值与试验值相差不大,其中最大误差限制在10%之内,能满足实际工程应用的需要。
2.1.2 翼身融合无人机验证
为了验证本文所采用的数值模拟方法与网格划分的可靠性,使用南昌航空大学NH1风洞实验室数据加以验证。该模型几何外形如图3所示,主要几何参数见文献[22]。

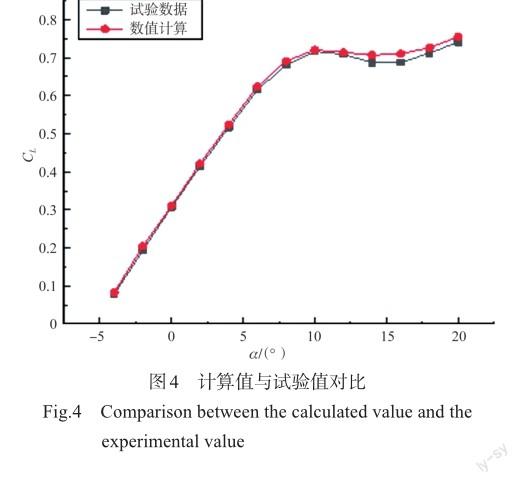
数值计算方法采用上文所述方法,其中来流速度为18m/s,对模型在来流迎角为条件下进行数据模拟,其中升力系数与试验值比对如图4所示。
从图4中可以看到,数值计算结果与试验值中的升力系数在小迎角以及失速迎角附近吻合很好,而在失速迎角以后最大相对误差控制在4.7%左右,因此本文的数值计算方法能够满足要求。
2.2 网格无关性验证
为了验证本文数值计算的可靠性,同时排除网格数量对计算结果造成的差异性,对动力构型在迎角α=10°的状态下进行计算。由于几何模型中心对称,故使用半模进行数值仿真。共划分三套不同数量的非结构网格进行数值计算,每套网格的第一层网格高度保持不变(d=3.3×10-5m),并保证Y+=1,三种不同网格数量的气动特性计算结果见表4。

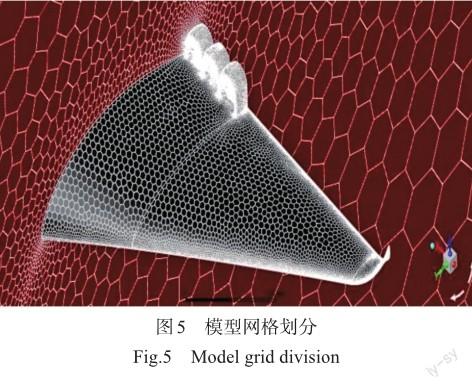
由表4可知,网格2、网格3的模型在气动特性方面的差异相当接近,故认为满足网格无关性要求,所以综合考虑计算结果的精度与效率,本文选择第2套网格数量级进行后续的数值计算,网格划分如图5所示。
3 分布式涵道风扇BWB布局气动特性分析
本节对有/无动力构型的全机气动特性进行分析,通过对比研究分布式涵道风扇的BWB布局形式在气动方面的影响,以及分布式涵道风扇的展向布置、间距等参数对BWB无人机的气动特性影响。
3.1 有/无动力构型的全机气动特性
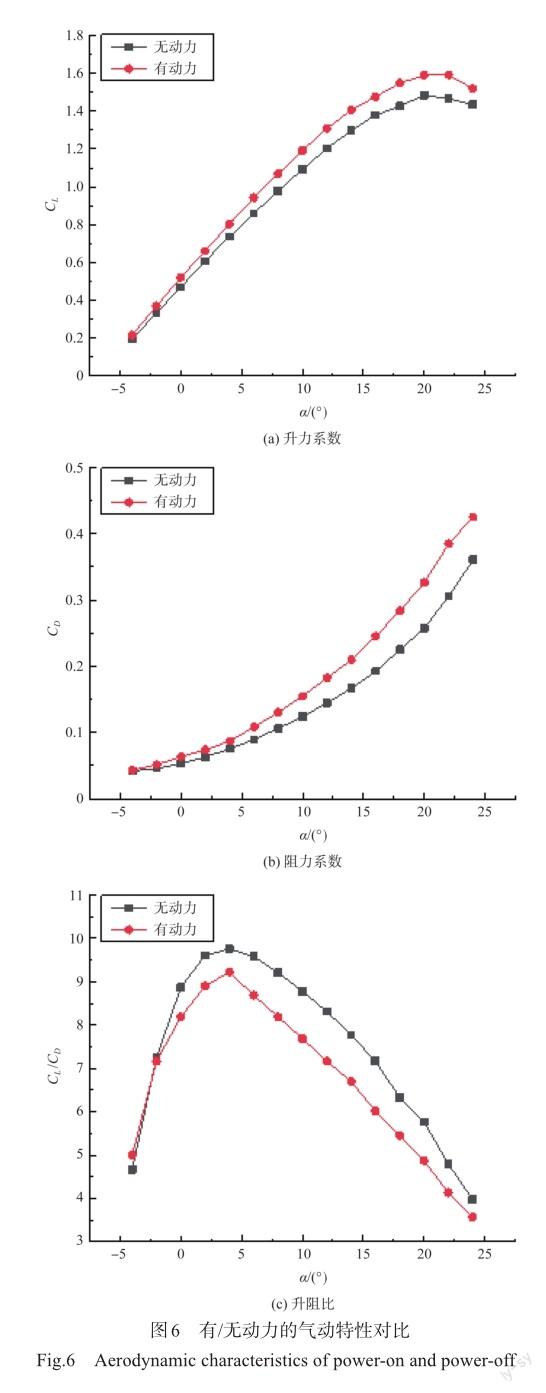
为研究分布式涵道风扇系统对BWB无人机气动特性的影响,对有/无动力的全机升力系数、阻力系数及升阻比进行数值计算,得到如图6所示的气动特性曲线。
从图6中可以看出,有动力影响对无人机的升阻力系数影响较大。在-4°~8°迎角范围内,有动力影响相较于无动力影响的升阻力系数增长幅度较小,而在10°~24°迎角范围内,有动力影响的升力系数增幅较大,最大增量为8.5%。而阻力系数最大增量为10.1%。而有动力影响下的构型升阻比总体上低于无动力影响下的构型,其中在14°迎角附近减小量最大为12.2%。同时相较于无动力影响,有动力影响下的构型全机最大失速迎角由20°增大到22°,说明分布式涵道构型无人机能够在大迎角范围下一定程度地抑制气流的分离。
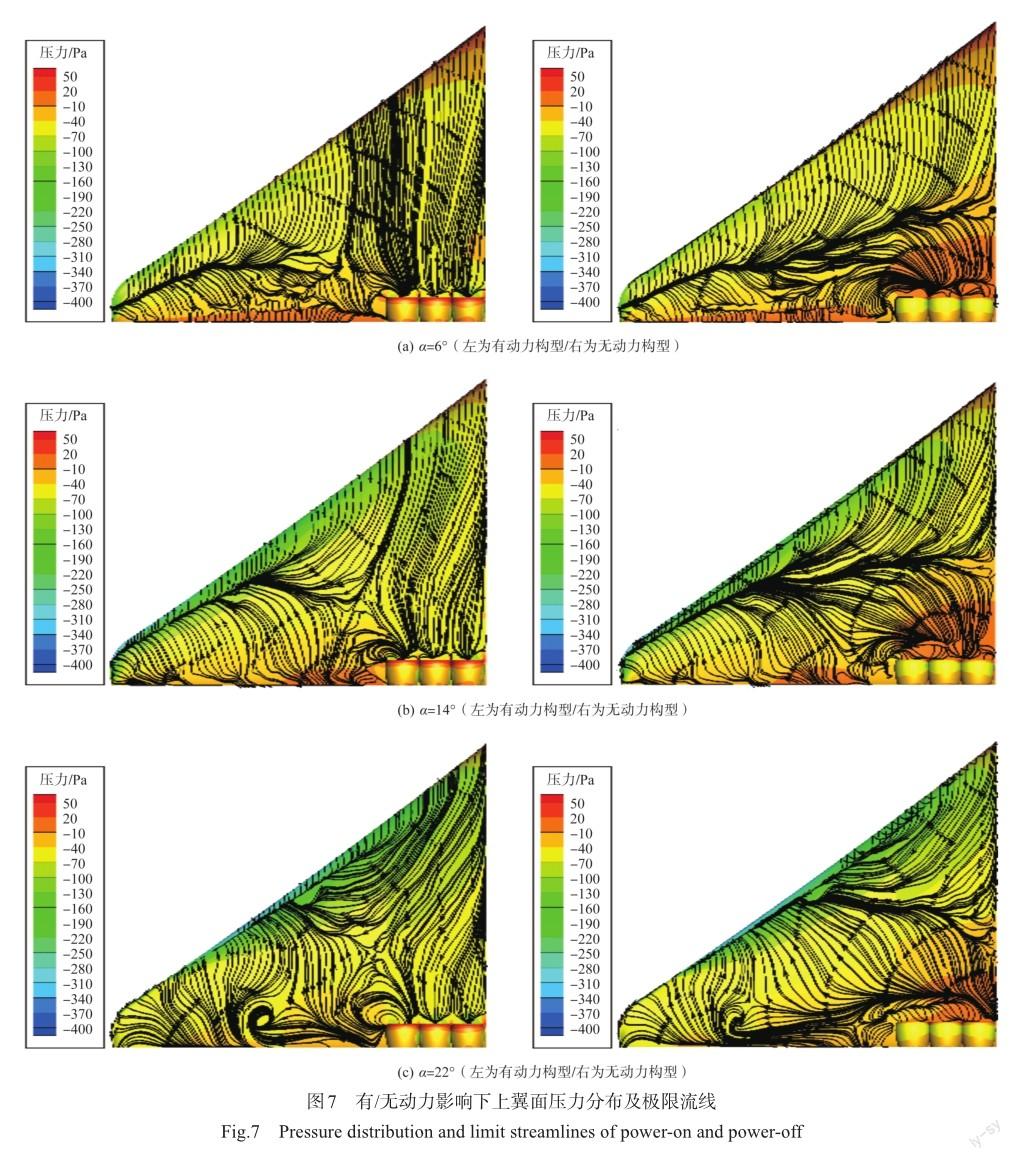
图7为有/无动力构型分别在6°、14°、22°迎角状态下上翼面压力分布以及極限流线分布情况对比。图中左侧为有动力构型,右侧为无动力构型。从图7可以看出,对于无动力构型,当迎角为6°时,模型上翼面流线在前缘及中部沿弦向流动良好,在后半部分表面流线开始沿展向流动,而在涵道风扇前方气流反向流动,这可能是由于静止的涵道风扇前方形成的高压产生了较大的逆压梯度,对气流产生了阻滞作用。当迎角为14°时,模型表面流线经过前缘沿展向流动,而在模型外翼段中部流线开始沿反向流动,表明气流在此范围附近出现了流动分离。随着迎角增大到22°,模型表面流线在前缘处发生了流动分离且在尾缘附近产生了分离涡,模型此时已完全失速。对比无动力构型,有动力构型上翼面负压有所增加,尤其在模型的内翼段以及涵道前方附近特别明显,而在模型的外翼段越远离涵道风扇区域所受到的抽吸作用越弱。相反地,模型的内翼段因受到涵道风扇的抽吸作用,其表面流线紧贴弦向方向流动,一定程度上抑制了气流的展向流动。
为了进一步了解有/无动力构型的压力分布情况,选取了三个不同的展向特征截面对其进行分析,如图8所示(图中c为弦长,Y/c为翼型截面沿弦长的相对位置,下文为了描述方便对有/无动力构型分别命名为case1/case0)。在特征截面X=0.075处,case0构型在涵道风扇入口附近对气流产生了一定的阻滞作用,有明显的高压区;而case1构型由于涵道风扇的抽吸作用明显,在特征截面上表现出更大的低压区,但在Y/c=0.1附近低压区域相比更大,其原因在于涵道唇口处抽吸作用更明显。在特征截面X=0.4处,22°迎角时有动力构型对应的翼型截面前缘吸力峰值更大,上表面静压更低,从而产生了更大的升力。从图8中还可以看到,距离涵道风扇入口越近,涵道的抽吸作用越明显,产生的负压增量越大。而在特征截面的上翼面case0和case1构型的压力系数曲线基本趋于吻合,这表明分布式涵道风扇对下翼面的气流没有产生影响。在特征截面X= 1.075处,两种构型在迎角为6°和14°的状态下对应的压力分布几乎吻合,这表明此翼型上表面的气流不受涵道风扇抽吸作用的影响。而在22°迎角下,case0构型相较于case1构型,其上表面产生更大的负压;且两种构型翼型截面均发生了流动分离,其中case1构型上表面的压力系数在40%c附近几乎不再变化,出现了大迎角流动分离,而case0构型上表面的压力系数在50%c附近几乎无变化,这表明case1构型在该特征截面更早出现流动分离,其影响区域更大。另外,在22°迎角下,比较case0构型的三个特征截面的压力分布,其中只有X=1.075处出现了流动分离,而其余两处截面并未发生流动分离。这表明在大迎角状态下,该翼身融合无人机的外翼段更容易发生气流分离。
进一步分析翼身融合无人机在大迎角状态下的失速情况,图9为有/无动力构型在α=22°迎角下X=0.075、X= 1.075特征截面的压力云图及极限流线。从图9中可以看到,在 X=0.075处,case0构型在涵道入口处对气流产生了一定的阻滞作用,形成了明显的高压区;而case1构型在涵道风扇的抽吸作用下,涵道风扇入口处产生了更大的负压,特征截面上表面的低压区范围变大,而翼型截面尾部附近却形成了更大的高压区。同时,在此截面处两构型均发生流动分离。在X=1.075处,两构型均发生显著的大区域流动分离,而case1构型的分离区更大。其原因在于,相比于case0构型,case1构型在该翼型截面的上表面前缘附近的低压区影响范围更小,从而使得其上表面的逆压梯度增大,导致气流分离区域提前,更易造成失速。
3.2 分布式涵道风扇展向位置对全机气动特性的影响
为了研究分布式涵道风扇不同展向位置对全机气动特性的影响,其他参数不变,只改变展向位置,分别对涵道风扇位于内翼段的有动力影响下的BWB无人机(case1构型)和位于外翼段的有动力影响下的BWB无人机(case2构型)进行仿真计算,两种构型的气动特性如图10所示。
从图10中可以看出,相比case1构型,case2构型的升力系数有一定的提升。在小迎角下两者的变化趋势类似,且升力系数提升不大,而在大迎角下case2构型的升力增量明显提升,最大增量为13.5%,且最大失速迎角由case1构型的22°提升到24°。而两种构型在阻力系数方面,除了在24°迎角下有所不同,其余迎角范围下几乎趋于一致。由于阻力系数差别很小,全机升阻比的大小主要由升力系数的大小决定,故case2构型的升阻比更好,最大升阻比在4°迎角下接近10。这表明分布式涵道风扇位于外翼段能带来更好的气动特性。
进一步分析分布式涵道风扇不同展向位置布局对无人机气动特性的影响,对22°迎角下的三个不同展向特征截面的压力分布进行分析。如图11所示(其中D为截面展向长度,X/D为翼型截面沿展向的相对位置),对比X= 0.2和X=0.595处可以看出,由于涵道风扇的抽吸作用,越靠近涵道风扇入口处其负压越大,而涵道风扇的抽吸作用对翼面截面的前半部分几乎没有明显的影响。比较两个特征截面,可以看到外翼段对无人机的升力贡献更大,而涵道风扇位于外翼段产生的升力增量大于涵道风扇位于内翼段所产生的升力增量。在远离涵道风扇区域的X= 1.075处,相较于case1构型,case2构型的压力分布变化不大,只在80%c附近即靠近截面翼型前缘区域有比较明显的变化,这可能是由于涵道风扇的抽吸作用带动了前缘附近气流的加速流动。case2构型能够在一定程度上推迟外翼段气流分离的区域,且气流分离表现出离内翼段越远,越容易发生分离。
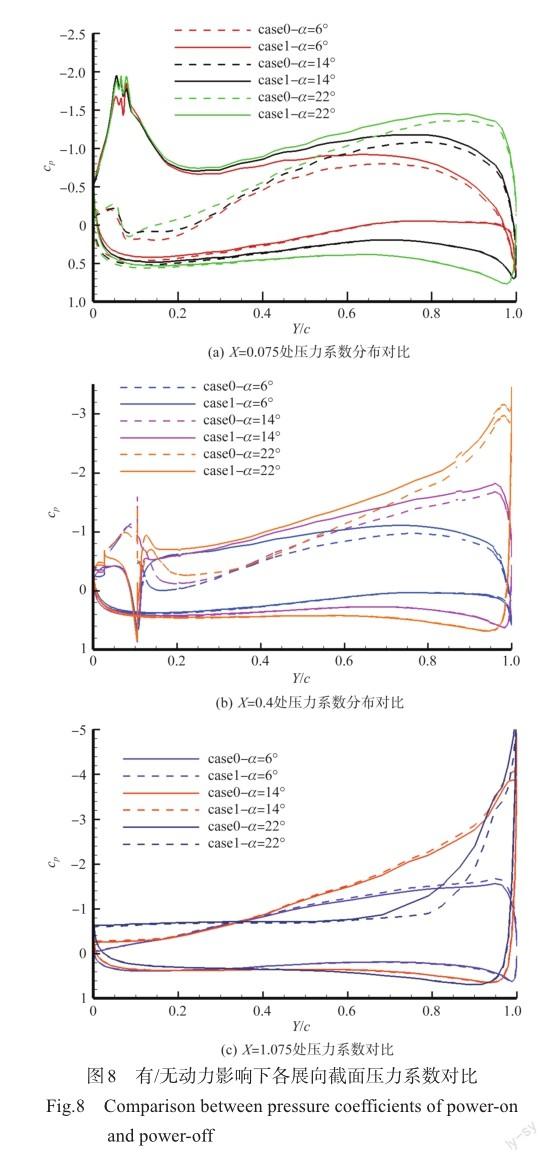
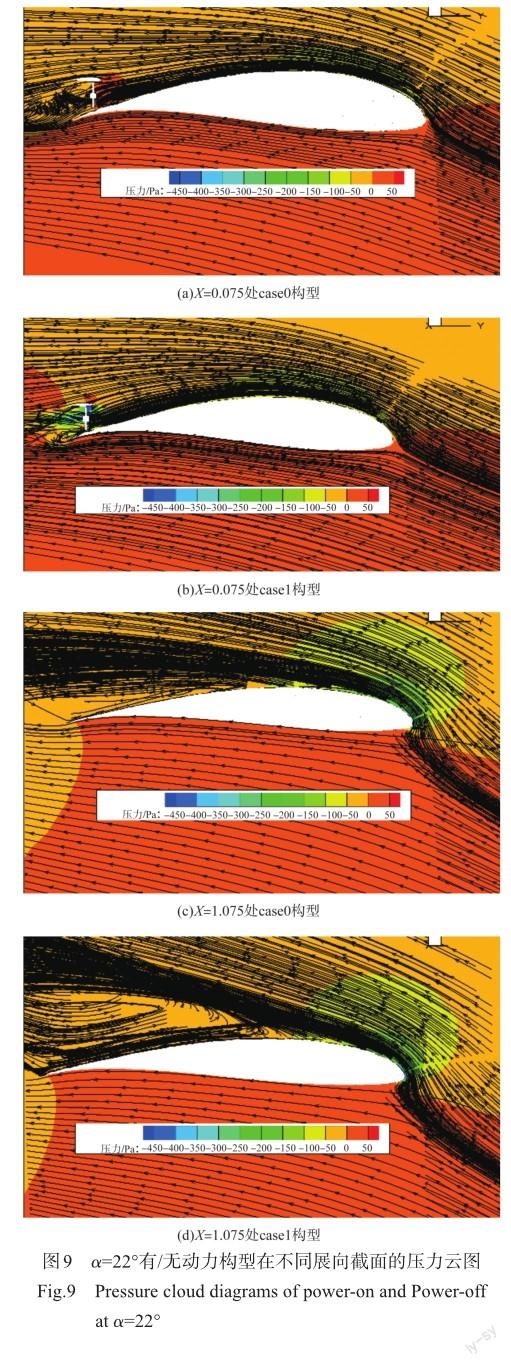

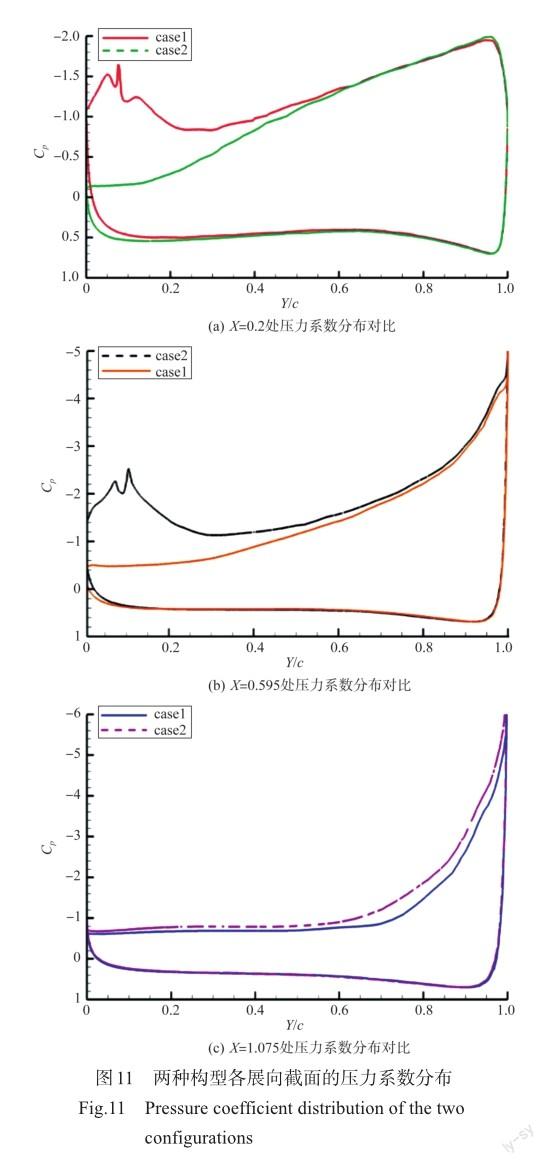
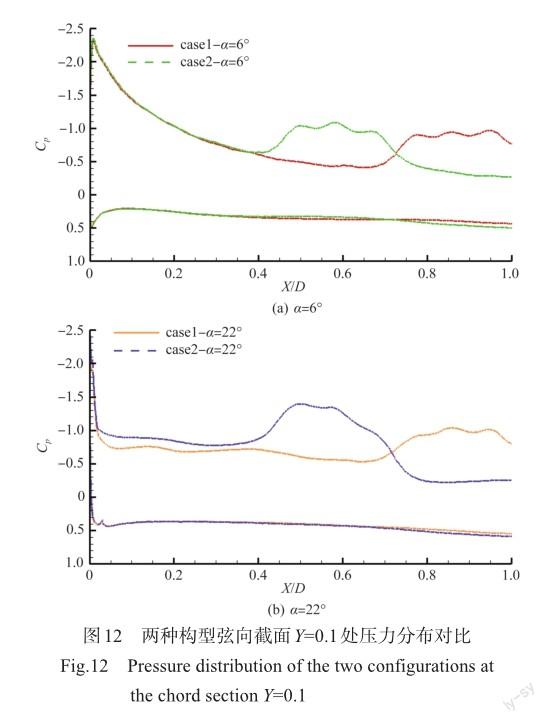
图12为两个迎角下两种构型在弦向截面Y=0.1处(涵道风扇入口附近)的压力分布。从图12中可以看到,在分布式涵道风扇的影响下,涵道风扇入口处的负压更大,且case2构型涵道风扇所产生的吸力峰值高于case1构型。在 6°迎角下,两种构型远离涵道风扇区域部分的外翼段的压力分布几乎重合,这表明在小迎角范围下,涵道风扇的抽吸作用对其覆盖区域之外的地方几乎没有影响,即小迎角范围下两种构型的升力大小主要由涵道风扇覆盖下的机翼部分提供。而在22°迎角下,與case1构型相比,case2构型的吸力峰值提升非常明显,且远离涵道风扇区域部分的外翼段的负压也有所增加,这说明在大迎角范围下,涵道风扇的抽吸作用增强,并带动外翼段周围的气流加速流动。从以上分析可以得出,分布式涵道风扇不同展向位置的布局在气动效果方面的差异主要在于分布式涵道风扇的抽吸作用使得外翼段升力的增量高于内翼段升力的增量,同时位于外翼段的涵道风扇抽吸作用的影响范围增大带动周围气流加速流动。
3.3 分布式涵道风扇间距对全机气动特性的影响
由于分布式涵道风扇的间距可能对BWB布局无人机具有一定的诱导增升效果,本节涵道风扇的其他参数与上一节保持不变,仅研究涵道风扇位于外翼段不同展向的间距:d=130(case2),230(case3),330(case4)。三种构型的气动特性如图13所示。

从图13中可以看出,相比于case2构型,case3构型的升力系数有一定的增加,阻力系数基本没有变化,两条曲线几乎趋于一致。而与case3构型相比,case4构型的16°小迎角范围以内,两种构型的升阻力系数几乎重合,但是当迎角增加到20°及以上时,case4构型的升阻力系数出现了较大的提升,其中升阻力系数分别相对增加了9.3%和7.6%。同时,case3和case4构型的升阻比也有一定的提升。
为了研究分布式涵道风扇的间距对无人机气动特性的影响,选取12°和20°两个迎角下的三种构型分别在弦向位置Y=0.1和Y=0.3处的特征截面对其压力分布情况进行分析,如图14所示。
从图14中可以看到,当迎角为12°时,在Y=0.1处截面上涵道风扇间距的增加扩大了无人机展向受涵道抽吸作用影响区域的宽度。相比于case2构型,case3和case4构型涵道风扇之间区域的负压有明显的提升,这跟涵道风扇的抽吸带动涵道唇口周围气流的加速流动有关。
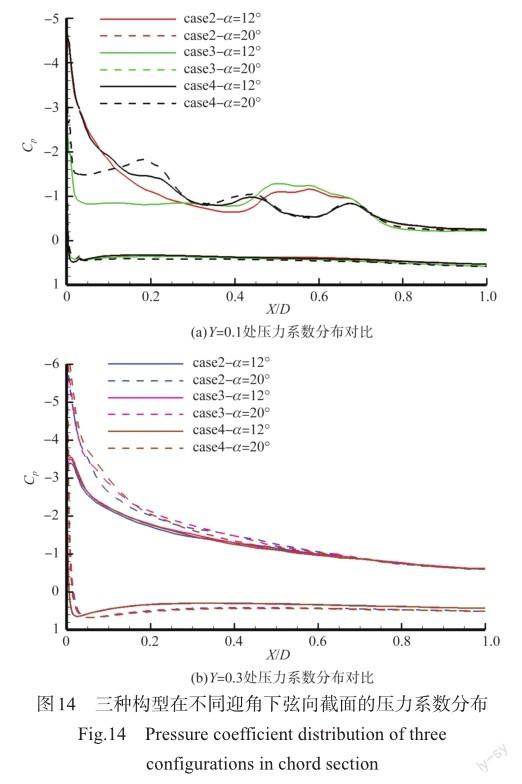
而与case3构型相比,尽管case4构型无人机展向受抽吸影响的面积有所增加,但是涵道风扇之间的区域经过气流耦合作用,其负压值有所减小。当迎角增大到20°时,在X/D=0.2附近区域出现了与12°迎角下完全不同的压力分布情况。此区域范围下,case4构型的负压明显大于其他两种构型。当在Y=0.3处截面时,两种迎角下对应的三种构型的压力分布没有明显变化,这表明在该截面区域下改变分布式涵道风扇的间距对其压力分布几乎没有影响,从而进一步可以反映出离涵道风扇入口越远,其抽吸作用越弱。
为了进一步分析三种构型在大迎角下气动特性的差异,沿三种构型的展向选取X=1.24处的特征截面来进行分析,图15所示为该特征截面下三种构型在20°迎角下的压力分布对比及压力云图情况。由图15(a)和图15(d)可以看到,与其他两种构型相比,在该截面下case4构型上表面的负压显著增加,表现为负压值从前缘先减小到中部,然后逐渐增大,且在涵道风扇唇口附近达到最大,之后又缓慢减小。这是由于涵道风扇的抽吸作用带动其前方以及涵道周围的气流加速流动,表现为图15(d)中涵道后方的气流反向流动。从图中case2构型和case3构型的压力曲线以及压力云图可以看到,在Y/c=0.8附近处翼型截面在该范围下开始出现大面积的气流分离,而case4构型由于受到涵道风扇抽吸的影响并未发生流动分离。总的来说,在小迎角下,随着涵道风扇间距的增加,分布式涵道风扇无人机的升力系數会有一定的提升,但随着间距的进一步增加,升力系数几乎保持不变,而其阻力系数随间距的增加保持不变。在大迎角状态下,随着涵道间距的进一步增加,分布式涵道风扇无人机的升力系数表现出显著的提升。这是因为无人机受涵道抽吸影响的面积不断增加且为无人机上表面注入了能量,从而在一定程度上更大范围地抑制了分布式BWB无人机表面气流的分离。
4 结论
通过研究,可以得出以下结论:
(1)与无动力状态相比,有动力状态下全机的气动特性有显著提升,最大升力系数增加了8.5%。主要表现为对全机后半段压力分布有显著影响,而对全机前半部分及外翼段压力分布影响不大。
(2)相较于分布式涵道风扇位于内翼段,布置在外翼段的分布式涵道风扇全机构型的升力系数有一定提升,且最大失速迎角也有所增加。出现这种差异主要是因为分布式涵道风扇的抽吸作用使得外翼段升力的增量高于内翼段升力的增量,同时位于外翼段的涵道风扇抽吸作用的影响范围增大带动周围气流加速流动。
(3)分布式涵道风扇间距对全机的气动特性的影响表现为在小迎角下,全机的升力系数随涵道间距的增加有一定的提升,而当涵道间距进一步增加之后,其升力系数几乎保持不变。在大迎角下,随着涵道风扇间距的不断增加,全机升力增量越来越大,其最大增量为9.3%。这是由于随着分布式涵道风扇间距的增大,其能够在一定程度上更大范围地抑制无人机上表面的气流分离。
以上对分布式涵道风扇BWB无人机的数模模拟有助于为分布式涵道无人机提供设计依据,对工程应用也有一定参考价值。

参考文献
[1]李开省.碳中和目标下航空能源转型研究[J].航空科学技术,2021,32(9):1-11. Li Kaisheng. Research on aviation energy transition under carbon neutrality goal [J]. Aeronautical Science & Technology, 2021, 32(9):1-11.(in Chinese)
[2]纪宇晗,孙侠生,俞笑,等.双碳战略下的新能源航空发展展望[J].航空科学技术,2022,33(12):1-11. Ji Yuhan, Sun Xiasheng, Yu Xiao, et al. Development prospect of new energy aviation under carbon peaking and carbon neutrality goals[J]. Aeronautical Science & Technology,2022,33(12):1-11. (in Chinese)
[3]黄俊,杨凤田.新能源电动飞机发展与挑战[J].航空学报,2016,37(1):57-68. Huang Jun, Yang Fengtian. Development and challenges of electric aircraft with new energies[J]. Acta Aeronautica et Astronautica Sinica, 2016,37(1):57-68. (in Chinese)
[4]梁向东.电动飞行器及其关键技术的研究探析[J].航空科学技术,2020, 31(6):1-6. Liang Xiangdong. Research on electric vehicle and its key technology[J]. Aeronautical Science & Technology, 2020, 31(6): 1-6. (in Chinese)
[5]李晓勇,李栋成,周涛.翼身融合飞机的空气动力学研究进展简介[J].民用飞机设计与研究,2006(4):19. Li Xiaoyong, Li Dongcheng, Zhou Tao. Advances in aerodynamics for blended-wing-body aircraft[J]. Civil Aircraft Design and Research,2006(4):19. (in Chinese)
[6]吴峰.翼身融合体飞机气动外形设计及分析[D].南昌:南昌航空大学,2017. Wu Feng. Pneumatic shape design and pneumatic analysis of wing body fusion aircraft[D].Nanchang: Nanchang Hangkong University,2017. (in Chinese)
[7]闫万方,吴江浩,张艳来.分布式推进关键参数对BWB飞机气动特性影响[J].北京航空航天大学学报,2015,41(6):1055-1065. Yan Wanfang, Wu Jianghao, Zhang Yanlai. Effects of distributed propulsion crucial variables on aerodynamic performance of blended wing body aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics,2015,41(6): 1055-1065. (in Chinese)
[8]Ashcraft S W, Padron A S, Pascioni K A, et al. Review of propulsion technologies for N+3 subsonic vehicle concepts[R]. NO.E-17995, 2011.
[9]Diedrich A, Hileman J, Tan D, et al. Multidisciplinary design and optimization of the silent aircraft[C]. 44th AIAA Aerospace Sciences Meeting and Exhibit, 2006: 1323.
[10]Lyu Z, Martins J R R A. RANS-based aerodynamic shape optimization of a blended-wing-body aircraft[C]. 21st AIAA Computational Fluid Dynamics Conference, 2013: 2586.
[11]Giuliani J E, Chen J P, Beach T A, et al. Numerical simulation of boundary layer ingesting (BLI) inlet/fan interaction[C].50th AIAA/ASME/SAE/ASEE Joint Propulsion Conference, 2014: 3731.
[12]Wick A T, Hooker J R, Zeune C H. Integrated aerodynamic benefits of distributed propulsion[C]. 53rd AIAA Aerospace Sciences Meeting, 2015: 1500.
[13]Perry A T, Ansell P J, Kerho M F. Aero propulsive and propulsor cross coupling effects on a distributed propulsion system[J]. Journal of Aircraft, 2018, 55(6): 2414-2426.
[14]Kerho M F. Aero propulsive coupling of an embedded, distribut‐ed propulsion system[C].33rd AIAA Applied Aerodynamics Con‐ference,2015: 3162.
[15]王科雷,周洲,張阳.分布式推进翼身融合飞行器气动特性研究[J].西北工业大学学报,2022,40(1):18-24. Wang Kelei, Zhou Zhou, Zhang Yang. Aerodynamic characteristics research of a distributed propulsion blendedwing-body aircraft[J]. Journal of Northwestern Polytechnical University,2022,40(1):18-24. (in Chinese)
[16]张阳,周洲,王科雷,等.分布式动力系统参数对翼身融合布局无人机气动特性的影响[J].西北工业大学学报,2021,39(1):17-26. Zhang Yang, Zhou Zhou, Wang Kelei, et al. Influences of distributed propulsion system parameters on aerodynamic characteristics of a BLIBWB UAV[J]. Journal of Northwestern Polytechnical University,2021,39(1):17-26. (in Chinese)
[17]Zonal M. Two-equation k-ω turbulence models for aerodynamic flows[C].24th Fluid Dynamics Conference, 1993.
[18]Hellsten A. Some improvements in Menter’s komega SST turbulence model[C].29th AIAA, Fluid Dynamics Conference, 1998: 25-54.
[19]馬一元,张炜,张星雨,等.分布式电推进无人机总体参数设计方法研究[J].西北工业大学学报,2021,39(1):27-36. Ma Yiyuan, Zhang Wei, Zhang Xingyu, et al. Research on the overall parameter design method of distributed electric propulsion UAV [J]. Journal of Northwestern Polytechnical University,2021,39(1):27-36. (in Chinese)
[20]饶崇,张铁军,魏闯,等.一种分布式电动飞机螺旋桨滑流影响机理[J].航空学报,2021,42(S1):157-167. Rao Chong, Zhang Tiejun, Wei Chuang, et al. Influence mechanism of propeller slipstream on wing of a distributed electric aircraft scheme[J]. Acta Aeronautica et Astronautica Sinica,2021,42(SI):157-167. (in Chinese)
[21]Grunwald K J, Goodson K W. Aerodynamic loads on an isolated shrouded propeller configuration of angles of attack from 10°~ 110° [Z]. National Aeronautics and Space Administration, 1962.
[22]石领先. 翼身融合无人机的总体设计与气动分析[D].南昌:南昌航空大学,2017. Shi Lingxian. Overall design and aerodynamic analysis of BWB UAV [D]. Nanchang: Nanchang Hangkong University, 2017. (in Chinese)
Research on Influence of Distributed Ducted Fans on the Aerodynamic Characteristics of BWB UAV
Liang Liang, Zhong Bowen, Jiang Shanyuan, Zhang Jiace, Wang Gao
Nanchang Hangkong University, Nanchang 330063, China
Abstract: The comprehensive performance of distributed powered BWB UAV is outstanding, which is also the inevitable trend of the development of aircraft in the future aviation field. Studying the aerodynamic characteristics of distributed BWB layout has an important supporting role for the design of distributed BWB layout. This paper uses CFD numerical simulation calculation, and then uses the mixed grid technology and k-ω SST turbulence model to solve the Reynolds average RANS equation. This paper studies aerodynamic effects of parameters such as with/ without power, span position of ducted fan and spacing of ducted fan on the whole aircraft under cruise condition. The results show that the distributed power can improve the aerodynamic characteristics of the whole machine under the same working condition; And the outer wing segment is the main way to provide lift; Reasonable spacing of ducted fans can produce better induced lift increase effect; At small angle of attack, the lift coefficient of the whole aircraft increases first and then almost stays the same with the increase of the ducted fan spacing. At large angle of attack, the lift coefficient of the whole aircraft increases gradually with the increase of the ducted fan spacing, and the maximum increase is 9.3%. The research and analysis on such aircraft is helpful to provide certain reference value for distributed propulsion BWB UAV aerodynamic layout design.
Key Words: distributed dynamics; MRF method; ducted fan; BWB; aerodynamic characteristics