UWB定位技术的应用研究与分析
2023-09-14丁加磊郝传柱
丁加磊 郝传柱

摘 要:从UWB定位技术不同的应用场景和服务对象入手,对如何改善老人出行负担较重和室内服务机器人自主移动精度低的问题进行研究。将UWB技术所实现的自动跟随和自主移动功能分别应用于老人助行器和室内服务机器人当中,使老人助行器能够自动跟随在老人身后,减轻出行负担,同时使室内服务机器人定位精度达到厘米级,达到高效管理的目的。最后分别对两种装置进行实验测试,测试结果显示,系统性能达到预期效果且具有较高的稳定性。
关键词:UWB定位技术;助行器;机器人
中图分类号:TP242 文献标识码:A 文章编号:2096-4706(2023)13-0161-06
Application Research and Analysis of UWB Positioning Technology
DING Jialei, HAO Chuanzhu
(Shandong Huayu University of Technology, Dezhou 253034, China)
Abstract: Starting with different application scenarios and service objects of UWB positioning technology, this paper studies how to improve the problems of heavy travel burden of the elderly and low autonomous mobile accuracy of indoor service robots. The auto-following and auto-movement functions realized by UWB technology are applied to the elderly walker and the indoor service robot respectively, so that the elderly walker can automatically follow the elderly, reduce the travel burden, and make the positioning accuracy of the indoor service robot reach centimeter level to achieve the purpose of efficient management. Finally, the two devices are tested, and the test results show that the system performance achieves the desired effect and has high stability.
Keywords: UWB positioning technology; walker; robot
0 引 言
随着当今社会人工智能和无线通信技术的快速发展,人们对生活和工作环境需求越来越高,为满足人们的生活需要,使室内外服务机器人“更聪明”地工作,通过UWB定位技术不同的定位算法来得到精确的定位精度,将UWB技术创新应用到老人助行器中,通过实验设计使其具有UWB自动跟随功能,可以使老人以及相关康复人员出行时真正摆脱双手,有效减轻出行负担。同时依靠UWB定位技术室内定位精度高的优点,将其创新应用于室內智慧服务机器人中,使其能够在室内进行高精度自主移动工作,定位精度高达厘米级,这样的定位可以更好地锁定室内的人员或是物品,更能够达到高效管理的目的,从而进一步扩展UWB定位技术在人工智能领域中的应用范围。
1 UWB定位技术应用的研究发展动态
目前,国内的UWB产业链及生态建设正处于起步阶段,已出现从芯片到解决方案的小生态雏形。时至今日,以苹果、三星、小米等为代表的手机厂商纷纷推出配装UWB功能的手机产品,包括基于UWB技术的智能手机可以代替钱包支付、门禁卡等。虽然,目前UWB处于早期发展阶段,但此前已出现许多应用,UWB定位技术已经应用到智能家居、智慧汽车、智慧医疗、智慧出行、智慧城市和智能工业等多个领域,在信息技术飞速发展的今天,将UWB定位技术应用于人工智能产品当中,必定会以其高速、安全、低成本等诸多优点,吸引越来越多研究者的注意,发展潜力及市场空间不可估量。
2 UWB自动跟随助行器
2.1 UWB自动跟随助行器总体设计
UWB自动跟随助行器主要由STM32单片机、UWB定位模块、漫反射光电传感器、电机驱动模块和直流无刷电机等组成,如图1所示。UWB移动标签由使用者携带,将UWB定位基站布置在助行器的两侧。通过获取UWB标签和UWB定位基站之间往返的飞行时间来得到相应的信息,并通过计算得到UWB标签的位置信息,同时,通过STM32单片机作为主控制器对各种信息进行处理判断,根据判断结果输出PWM脉冲信号并通过电机驱动模块控制电机进行相应的工作,从而实现助行器对移动标签的自动跟随工作。
2.2 UWB自动跟随助行器系统算法设计
本系统采用两基站一标签定位的方法来实现自动跟随,减少了基站数量从而降低了硬件的成本,同时也保证了其定位的精度,基于信号的入射角度进行定位,其通过两直线相交确定位置,如图2所示。
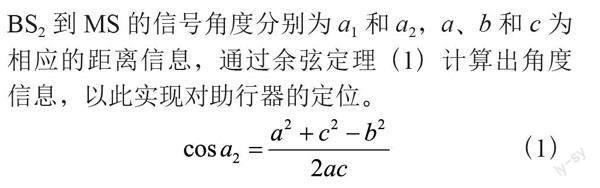
首先通过到达时间算法(Time of Arrival, TOA)计算出标签到两个基站的距离,数据经过卡尔曼滤波处理,然后利用三角函数进行相关计算,以两个基站的中点为基准点,两个基站所在直线为基准线,得到手持标签到基准点的距离以及偏离基准线的角度,利用相对角度从基站位置画出两条直线,两条直线的交点就是标签的位置,而且基站的位置是固定的,因此基站坐标已知。同样设基站BS1、BS2坐标分别为(x1,y1)、(x2,y2),标签为MS(x,y),BS1、BS2到MS的信号角度分别为a1和a2,a、b和c为相应的距离信息,通过余弦定理(1)计算出角度信息,以此实现对助行器的定位。
2.3 UWB自动跟随助行器硬件设计
首先,如图3所示,本设计分为定位部分、控制部分以及执行系统部分三大部分,系统下位机总体电路图如图4所示。本设计的定位系统通过三个UWB模块实现,其中一个UWB模块作为移动跟随目标,另外两个UWB模块安装在装置两边作为UWB基站,使用者通过手持UWB标签来达到助行器自动跟随在身后的目的。
装置采用红外避障传感器用于在自动跟随过程中实现自动避障功能。装置的控制部分主要以STM32F103C8T6作为主要控制芯片,通过其来获取各个传感器的各项数值并进行处理判断,并根据判断结果来控制执行系统进行相应的工作。装置的执行系统部分主要是通过电机驱动模块来驱动直流无刷电机进行相应的工作,以实现相应的功能。
同时,本系统通过控制系统、UWB定位系统和执行系统可以进行PWM调速;当装置与UWB标签距离超过10 m时,控制系统设置占空比为70%,驱动装置保持100 m/min,以此类推,当UWB标签与UWB基站距离小于1 m时,控制系统设置占空比为0%,助行器停止,以此来保证在自动跟随过程中其跟随距离保持恒定。通过UWB技术实现的自动跟随功能来有效减轻使用者的出行负担,达到省力的目的。
2.4 UWB自动跟随助行器系统软件设计
本設计采用Keil uVision5进行编程。如图5所示,装置的控制系统由STM32单片机作为下位机主控,通过对UWB模块测得的距离及角度信息进行处理判断并将判断结果通过串口通信传给STM32单片机,单片机对接收的数据进行处理判断,然后单片机发出指令通过电机驱动模块控制电机向相应的方向工作运行,在这个过程中通过与避障系统相结合,单片机能够快速分析与反应并控制装置的行驶方向。
2.5 UWB自动跟随助行器功能测试
为验证UWB自动跟随助行器的实际运动行驶状态,选择在室外区域进行自动跟随测试。首先将助行器放置起点处,将实验采用的两个UWB定位基站分别放置于小车的两端,将可移动的标签任意放置在实验的规定区域内。系统设定助行器拥有四种行驶情况:前进、左转、右转和停止,系统实验流程如图6所示。标签无论如何移动都可与两个定位基站形成稳固的三角形位置,如图7所示。
实验预设当Y≥1 m,75°<X<115°时,小车的行驶状态为跟随移动标签向前行驶。当0°<X<75°时,小车的行驶状态为跟随移动标签向左行驶;当115°<X<180°时,小车的行驶状态为跟随移动标签向右行驶。当Y<1 m时,小车的行驶状态为停止行驶(保持停留原地)。实验数据如表1所示。
如图8所示,使用者手持UWB标签,助行器即可自动跟随在使用者的身后,同时,在跟随过程中,装置能够与使用者保持一定的距离,同时,若左、右前方遇到障碍物装置能够自动进行相应的避障工作,达到了预期的目标。
综上所述,将UWB定位技术应用于老人出行产品中意义重大。
3 UWB室内智慧服务机器人
3.1 UWB室内智慧服务机器人总体设计
UWB室内智慧服务机器人主要由机身、UWB室内定位系统、QT上位机、PWM脉宽调制速度调控装置、ESP8266Wi-Fi模块以及避障系统等组成。系统主要以STM32F103ZET6作为系统下位机核心部件,传统室内机器人的自主移动是基于循迹来实现,本设计采用UWB定位技术代替循迹,使机器人能够在室内进行高精度自主移动,使其更加智能化。同时利用Wi-Fi网络模块,将机器人所处的室内环境的各项信息以及机器人自身的各项信息上传至上位机,实现可移动终端与室内机器人之间的无线通信。
3.2 UWB室内智慧服务机器人系统算法设计
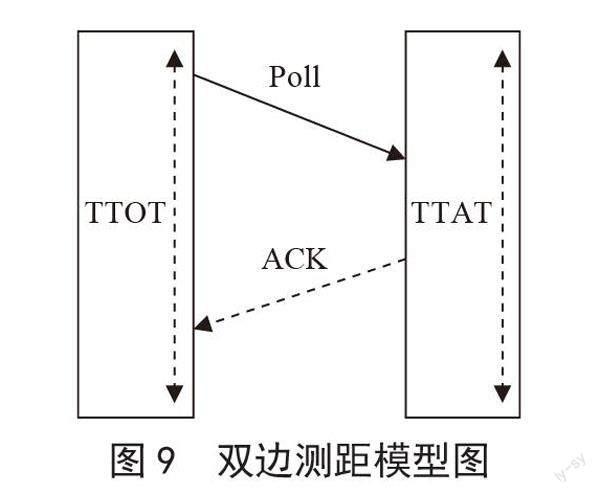
本系统采用TOF(双向飞行时间法)算法获取UWB相关距离值,如图9所示,将发送方发送的数据包与接收到响应的时间长度标记为TTOT,将接收方接收到的数据包与发送响应的时间长度标记为TTAT。
因此根据式(2)可以得到数据包在空中单向飞行的时间TTOF为:
由上述TOF测距原理并结合超宽带定位模块的通信协议,根据式(3)可以得到所测标签与基站之间的距离值D,c表示光速。
本设计采用三基站两标签定位的方式,故采用Chan算法进行坐标数据的(假设UWB的测量误差服从正态分布)计算,坐标示意图如图10所示。
3.3 UWB室内智慧服务机器人硬件设计
UWB室内智慧服务机器人系统硬件总体设计分为三个部分:定位部分、上位机部分和运动平台部分。产品的室内定位部分将使用五个UWB定位模块,其中三个UWB定位模块作为基站,一个UWB定位模块安装在装置车身作为标签1,另外一个UWB定位模块作为发送指令的标签2,同时,还可以通过手机APP来代替标签2发送指令,在三基站两标签的基础上还可以增添基站和标签设备,以实现多个目标物体定位操作;运动平台部分包括移动和避障所需的多个模块,三大部分之间采用Wi-Fi无线通信的方式进行数据传输。定位部分将获取到的坐标数据传送到运动平台和上位机部分,运动平台根据接收到的数据进行移动,同时上位机将接收到的数据以图形化的形式显示出来。整体框图如图11所示。
图11中表述标签1、标签2与三个基站分别进行轮询,当获取到基站到标签1和标签2的距离数据后把数据传送到主基站中,主基站再把数据打包发给标签1,标签1再通过网络模块将数据传送到PC端;最后在PC端上位机将获取的数据换算成坐标数据,并将坐标显示在上位机地图中。当网络模块2发送执行指令到网络模块1时,STM32F103ZET6就会通过电机驱动模块驱动电机带动麦克纳母轮将机器人移动到标签2位置,在移动的过程中通过多个超声波模块采集到的距离数据躲避行进过程中的障碍物,若在移动过程中方向出现偏差时,使用MPU6050模块去判断机器人移动的方向并进行方向校正,当到达指定的位置后,机器人将会自动停止,同时采用ESP8266的无线传输方式将定位的数据发送到PC端,PC端将ESP8266传输回来的定位数据通过QT上位机软件实时地显示出人和机器人的具体位置,智能化程度非常高。
如图12所示,图中黑色圆点为基站标注点,黑色正方形为定位标签,当三个基站经过一定的通信协议得到标签与其之间的距离后,通过特定的算法计算得到当前的位置信息。
3.4 UWB室内智慧服务机器人系统软件设计
基于本系统硬件设计,系统软件分为四大部分组成:UWB定位距离的获取及坐标的转换;运动平台获取到数据后驱动机器人前往标签所在的区域位置;网络模块获取的数据转化为TTL电平数据进行数据转发;PC上位机软件对数据处理并显示结果。软件框架如图13所示。
本设计上位机编程采用C++语言进行开发,开发工具为Qt Creator,装置采用ESP8266的无线传输方式将定位的数据发送到PC端,PC端将ESP8266传输回来的定位数据通过QT上位机软件实时地显示出人和机器人的具体位置,智能化程度非常高。
如图14所示,首先需要对使用的串口端口号进行选择,如果没有对应的端口号则获取数据失败。设置好三个基站在室内的具体位置,选择好端口号后点击“打开串口”,配置好串口参数,上位机软件自动接收来自网络模块的數据;上位机接收到完整数据后通过算法将数据转换成坐标数据,最后在上位机软件上就可以实时观察到三个基站与两个标签之间的距离和坐标,并以图形化的形式在地图上显示出来,如图15所示。
3.5 UWB室内智慧服务机器人系统测试
3.5.1 定位距离及坐标精度测试
坐标数据的获取是整个系统中最为重要的一部分,坐标数据是以基站到标签之间的距离数据换算出来的,故测试数据需要距离数据还有算法计算出来的坐标数据,基站与标签的测试结果如表2和表3所示,定位坐标测试结果如表4所示。本测试环境是在空间位置较大但教学仪器较多的实验室中进行。
3.5.2 移动精度测试
移动精度的数据测试是标签1在室内任意位置时,测试运动平台是否可以移动到标签1所在的坐标区域,测试结果如表5所示。
在调试的过程当中,发现系统可以进一步优化和深入研究,如超声波避障,如果障碍物过多机器人走进死胡同后运动平台就很难再走出来,局限性很大,在未来希望可以使用雷达或者图像识别技术进行避障。同时在三基站两标签定位的基础上面可以突破到更多基站和标签的定位。随着UWB技术在手机上面的发展,以后也有望使用手机作为标签,这将会给人们带来更多的方便,因此本设计的研究是非常有意义的。
综上所述,将UWB定位技术应用于室内智慧服务机器人以及相关产品中,不仅摆脱了传统室内循迹移动的局限性,更好地服务人们的日常生活,同时其功能还可以不断扩展,在未来还可以提供更加强大的公共服务能力。
4 结 论
文章以老人助行器和室内智慧服务机器人两个装置为例,将UWB定位技术分别应用于其中。对于自动跟随老人助行器,虽然在自动跟随的基础上面增加了自动避障功能,总体测试效果达到预期目标,但考虑到在实际应用中存在很多外界因素的影响,因此装置还需要进一步改善,例如在此基础上增加视觉技术,提高跟随精度。对于室内智慧服务机器人,虽然在室内定位精度已经达到厘米级,但在避障效果方面也还需改进,例如增加视觉或者激光雷达避障,同时在三基站两标签的基础上可以扩展更多的标签和基站进行室内定位,进一步提高室内定位精度。总体来看,两种系统的设计思路、选用的技术方案、软硬件的搭建等方面都具有创新性和实用性。
参考文献:
[1] 赵荣泳,张浩,林权威,等.UWB定位技术及智能制造应用 [M].北京:机械工业出版社,2020.
[2] 刘杰,林佳颖.基于单片机的老人出行智能助手的设计 [J].电子产品世界,2021,28(7):91-94.
[3] 杜美玉,于湉,胡霆丰,等.基于UWB技术的自动跟随避障系统设计研究 [J].电子元器件与信息技术,2020,4(8):62-63+77.
[4] 张兴,张崇巍.PWM整流器及其控制 [M].北京:机械工业出版社,2012.
[5] 仲江涛.基于UWB室内定位算法的研究与实现 [D].深圳:深圳大学,2017.
[6] SCHROEER G. A Real-Time UWB Multi-Channel Indoor Positioning System for Industrial Scenarios [C]//2008 International Conference on Indoor Positioning and Indoor Navigation (IPIN).Nantes:IEEE,2018:1-5.
作者简介:丁加磊(2001.08—),男,汉族,山东日照人,本科在读,研究方向:电气工程及其自动化;郝传柱(1983-04—),男,汉族,山东聊城人,副教授,工程师,本科,研究方向:自动化、控制工程。
收稿日期:2023-01-05
基金项目:2022年国家级大学生创新创业训练计划平台申报项目(202213857004)
