无人机倾斜摄影技术在大比例尺地形图测绘中的应用研究
2023-09-14任亚龙

摘 要:针对采用单镜头生产的地形图精度较低的问题,提出使用多镜头倾斜摄影方式制作大比例尺地形图的方案。首先对倾斜摄影测量技术及作业流程进行了介绍,其次以实际项目为例,对关键环节进行了深入分析,最后利用检查点在EPS软件中对地形图精度进行了检测统计。结果表明,该次生产的地形图精度可以满足1:500比例尺精度要求,可为同行作业人员提供参考借鉴。
关键词:无人机;倾斜摄影;实景三维模型;大比例尺地形图
中图分类号:TP391;P231 文献标识码:A 文章编号:2096-4706(2023)13-0141-04
Research on the Application of UAV Tilt Photography in Large Scale Terrain Map Surveying and Mapping
REN Yalong
(Sanhe Digital Surveying and Mapping Geographic Information Technology Co., Ltd., Tianshui 741000, China)
Abstract: In response to the problem of low accuracy in terrain maps produced using a single lens, the author proposes a scheme to produce large-scale terrain maps using multi lens oblique photography. Firstly, the tilt photogrammetry technology and operation process are introduced. Secondly, taking an actual project as an example, key links are analyzed in depth. Finally, the accuracy of terrain maps is tested and statistically analyzed using checkpoints in EPS software. The results show that the accuracy of the terrain map produced in this production can meet the accuracy requirement of 1:500 scale, which can provide reference for peer operators.
Keywords: UAV; tilt photography; realistic 3D model; large-scale terrain map
0 引 言
数字线划图也被称为地形图,其有小比例尺、中比例尺和大比例尺之分。中小比例尺地形图一般采用遥感数据生产,而大比例尺地形图由于其精度要求高,因此通常采用外业实地测量和无人机摄影测量方式生产。外业实地测量是采用GPS-RTK、全站仪等设备,在现场进行作业。GPS-RTK需要卫星信号覆盖,在农村地区和城区,由于高山、建筑等遮挡,可能会使得GPS-RTK设备接收不到卫星信号,从而影响测量精度。全站仪测量,要求架设全站仪的位置和被测点之间通视,这种方式需要频繁更换设备架设位置,不利于高效作业。上述两种外业实地作业方式作业效率低、劳动强度大、风险高、成本高。全野外作业方式,已经无法满足当今社会对数字线划图成果现势性和高精度的要求了。近年来,随着航天技术的迅猛发展,无人机设备成本的降低、卫星导航精度的不断提高,采用无人机摄影测量方式生产地形图成为形图生产的主要方式[1-3]。起初无人机摄影测量搭载单镜头进行影像数据获取,基于虚拟立体像对进行大比例尺地形图数据的生产,但是这种方式生产的地形图精度低,很多情况下无法得到符合精度要求的测绘成果[4]。随着相机重量的减轻和相机组装技术的快速发展,无人机搭载多镜头从空中对地面进行航摄,获取多视角影像数据,采用多视影像密集匹配算法,生产高精度高密度的三维离散点云数据,采用自动化纹理映射贴图技术生产实景三维模型,并在三维模型的基础上生产一系列测绘产品成为摄影测量产品制作的主流方案[5]。本文以实际生产项目为例,采用无人机搭载5镜头相机进行低空倾斜影像数据获取,并利用ContextCapture软件生产三维模型,采用EPS进行地形图测绘。利用实地特征检查点对地形图精度进行检测统计,采用高精度中误差计算公式,对本文生产的地形图,从平面和高程两方面进行精度检测。结果表明:采用本文方案制作的地形图,其平面、高程较差和中误差均满足1:500比例尺地形图精度要求,可为大比例尺地形图的生产提供参考。
1 倾斜摄影技术概述
1.1 无人机倾斜摄影测量技术
无人机倾斜摄影测量是指以无人机为飞行平台,搭载多台影像传感器进行影像数据获取,采用摄影测量软件,利用共线方程原理,借助多种算法,在海量影像中对影像之间的关系进行结算,匹配提取同名点坐标,并自动剔除粗差点,然后匹配高密度点云数据并构建不规则三角网,完成纹理的自动映射,得到可視的实景三维模型。并以三维模型为基础数据,采用不同软件生产一系列测绘产品。无人机一般采用固定翼和旋翼,固定翼其航飞时间长,作业效率高,多旋翼其航飞高度低,作业效率低,获取影像分辨率高。搭载的多镜头常见到的是5镜头,其由4个侧视相机和1个下视相机组成。下视镜头相当于传统的垂直摄影测量方式,垂直地面进行影像数据的采集;侧视镜头则是与地面呈一定的角度,从而获取被摄物体的侧面纹理信息。这种方式获取的影像数据量是垂直摄影测量的5倍,数据冗余度非常高,对数据解算要求很高,但是倾斜摄影盲区更少,获取的影像信息更加丰富,为更高精度的测绘产品生产提供了保障。随着目前摄影测量软件算法的不断优化提升,倾斜摄影数据已经可以被准确解算了。
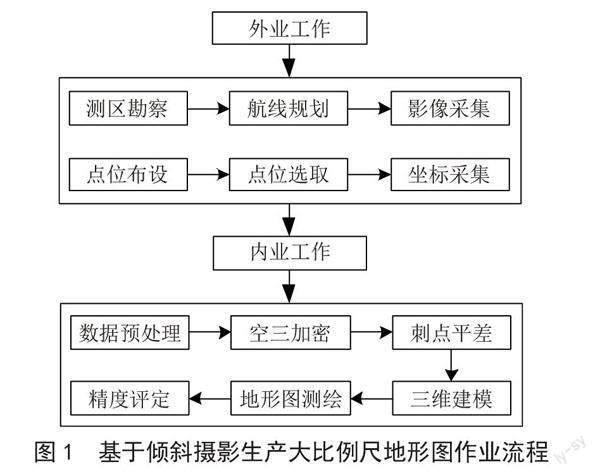
1.2 基于倾斜摄影生产大比例尺地形图的作业流程
其主要由外业和内业两部分组成,外业涉及勘察测区、布点测点、规划航线、航摄影像;内业主要涉及外业成果的预处理、空三加密、自动化三维模型生产、大比例尺地形图制作。具体的作业流程,如图1所示。
2 案例分析
某区域要生产1:500比例尺地形图用于规划项目,任务区地势较为平坦,房屋高度高差约50 m,建筑分布较为密集,车流量大,采用全野外方式作业成本高,危险性大;采用垂直摄影测量方式作业,成果精度无法保证。综合考虑作业成本和成果精度,本次决定采用倾斜摄影方式进行地形图的生产。
2.1 像控点布设与采集
首先将任务区导入到LSV软件中,按照500 m的距离均匀布设像控点,在任务区拐角处加密布设像控点,像控点要求将任务区完全覆盖。布设时,要考虑人员能够到达,并且布设的点位不易被破坏,不应该位于车流和人员活动密集区域,四周要空旷,像控点点位要尽可能地不出现在航摄盲区范围内。布设完成后,将布设成果导出为kml格式,提供给外业像控点采集人员进行点位采集。为了提高像控点点位采集与转刺的精度,本次使用红色油漆在地面上直接喷涂L形,如图2所示。对于不能喷涂的区域,则将靶标L形板子固定在地面上。使用GPS-RTK进行坐标采集,采集坐标时,要求采集L形外角,且设备上气泡必须居中,每个点位采集多次,且多次较差均要求小于1 cm,否则重新采集该点位坐标。像控点采集完成后,按照同样的方式,在像控点控制精度薄弱区域,随机采集30个特征检查点,用于后续成果精度的检测。
2.2 航线规划与影像采集
为了获取更加丰富的纹理信息,减少航摄盲区,本次航向、旁向重叠度均设置为85%,在确保航飞安全的情况下,尽可能进行低空飞行,采集分辨率更高的影像。本次设置航摄高度120 m,采集地面影像分辨率为0.02 m。为了确保任务区边缘航摄影像覆盖全,成果精度高,本次在航线规划时,航向外扩了2条基线,旁向外扩了2个航带。
在正式航飞作业前,要对无人机进行全面检查,主要包括电池电量、相机作业是否正常、内存卡是否能够正常读写数据、相机焦距是否固定等。经过检查和试飞,所有设备均正常运行。在起飞环境安全时,完成无人机的起飞任务,并通过地面站实时观察航飞状态,确保航飞可控。航摄完成后,取出内存卡,连接到电脑上,对航摄成果质量进行查看。通过人机交互方式查看影像,影像对比度明显,地物清楚,分辨率高,质量符合航摄要求。POS与影像一一对应,数据完整。
2.3 数据预处理
数据预处理主要包括影像质量提升、冗余数据剔除和POS精度优化。本次航摄影像成果质量好,无需进行预处理。在倾斜摄影数据解算时,冗余数据会严重影响数据解算精度和效率,因此本次利用数据预处理软件,对后期不参与建模的影像进行了剔除,减少了影像数量,可以有效提升数据解算效率和精度,缩短数据生产工期。本次航摄5镜头,只记录了下视镜头POS数据,并未对侧视镜头的POS数据进行记录。在实际生产中,可以使用下视镜头的POS来代替侧视镜头的POS进行数据解算,但是这样精度较低,也容易使得空三加密解算失败。为了提高POS的精度,本次以垂直镜头对应的POS数据为基准,结合5相机之间的安置距离和方位参数,对4个侧视镜头的POS数据重新进行了解算,使影像和POS准确对应。
2.4 空中三角测量解算
本次数据解算使用ContextCapture软件,新建工程,将优化后的影像数据、POS数据导入到软件中,设置任务队列路径,提交空三解算任务,完成影像数据的空三加密解算。解算完成后,对其成果进行查看,空三平整、未分层和弯曲。查看空三报告,各项精度指标符合规范要求。设置坐标系,导入像控点,完成像控点坐标的转刺及平差调整。平差调整的目的是将像方坐标系纠正到大地测量坐标系下,以满足项目要求。再次查看平差后的空三报告,加密点重投影中误差明显减小,仅为0.27个像素,优于平差前的0.32个像素,部分残差较大的加密点被自动剔除了,像控点三维中误差为0.003 m,精度符合規范要求,成果可直接用于后续密集点云的匹配和三维模型的生产。本次空三加密成果如图3所示。
2.5 自动化三维模型生产
空三解算只获得了少量的加密点,并不能准确的描述地形的高低起伏,为了获得更密集的点云,软件在生产模型前,首先利用多视影像密集匹配算法,自动完成密集点云的匹配。匹配得到的成果是离散的点,实际地物都是以面的形式存在的,因此需要将离散的点转为面。目前不规则三角网能够较好地表达地形的高低起伏,因此在得到密集点云后,软件又自动进行了不规则三角网的构建,这样得到的成果被称为“白膜”。三角网顶点和影像上纹理的是存在一一对应的关系的,采用直接法完成影像纹理的自动贴图,最终得到高精度、高清晰度、高逼真的可视实景三维模型成果,部分模型成果如图4所示。
2.6 大比例尺地形图制作
基于摄影测量生产地形图目前只有两种方式,即虚拟立体测图和裸眼测图,本次采用裸眼测图。将生产的OSGB格式模型导入到EPS软件中,自动生成得到DSM索引文件,然后按照地形图采集规范和软件操作流程,完成地形图数据的采集。在地形图数据生产中,房屋采集一般效率都比较低,为了能够快速高效的采集房屋,本次在EPS中,使用五点房工具对房屋进行快速高效采集;等高线是地形图中非常重要的一项元素,为了快速绘制等高线,在对等高线数据进行生产时,植被密集区域采用淹没方式,裸露区域使用高程点自动生成等高线的方式完成。对于因模型拉花导致无法准确采集的区域,则进行外业补充测量,最后内外业数据相结合,得到最终的地形图成果,部分成果如图5所示。
3 精度评定
测绘成果最重要的就是看精度是否符合要求。将30个检测点加载到EPS软件中,双击快速定位,然后手动测量其实际的位置,完成地形图较差的检测与统计,部分检测统计结果如表1所示。
采用高精度中误差计算公式,对本次成果精度进行了统计,得到其平面和高程中误差分别为±0.142 m和±0.155 m,精度符合1:500地形图规定误差。
4 结 论
本文介绍了倾斜摄影测量技术,对大比例尺地形图制作流程进行了说明,并以实际项目为例,对本文方案生产的大比例尺地形图精度进行了检测统计,其结果表明,采用倾斜摄影方式生产的大比例尺地形图,其精度可以达到1:500的规范要求,验证了本文方案的可行性。大比例尺地形图在实际应用中有着不可取代的地位,希望本文的方案可以为同行作业人员带来参考,共同提升测绘成果的精度,推动测绘技术高质量快速发展。
参考文献:
[1] 杨昆仑.无人机倾斜摄影测量技术在大比例尺地形图测绘方面的应用 [J].测绘技术装备,2019,21(1):84-88.
[2] 周小杰,胡振彪,乔新.无人机倾斜摄影技术在大比例尺地形图测绘中的应用 [J].城市勘测,2019(1):63-66.
[3] 徐思奇,黄先锋,张帆,等.倾斜摄影测量技术在大比例尺地形图测绘中的应用 [J].测绘通报,2018(2):111-115.
[4] 郭凯,汪旭波,杨荣欣.无人机倾斜摄影测量技术在大比例尺地形图测绘中的应用[J].测绘与空间地理信息,2022,45(S1):256-258+261.
[5] 田泽海,余星.无人机倾斜摄影技术在大比例尺地形图中的应用 [J].地理空间信息,2021,19(10):49-52+149-150.
作者简介:任亚龙(1985—),男,汉族,甘肃天
水人,工程师,本科,主要研究方向:测绘地理信息、不动产测绘、工程测量以及航测遥感。
收稿日期:2023-02-04
