基于压降速率法的恒压控制器设计
2023-09-12沈善修
沈善修
(湖北省天然气发展有限公司,湖北 武汉 437000)
伴随着天然气行业的发展进步,越来越多的输气场站采用调度中心控制或者自动控制[1-3],各燃气管道企业相继实施全自动分输控制改造,并逐步实现了全自动输气。全自动分输控制逻辑主要是基于流量控制和压力控制来实现的[4]。压力控制,指在日常输气时通过PLC对压力调节阀进行自动控制[5-7],使得调压阀后端的压力稳定。
压力控制主要是应用PLC内部的PID控制。当下游天然气管网压力波动频繁、下游用气不稳定、工作调压阀死区较大时,PID控制就会出现压力调节不稳、压力波动大、工作调节阀频繁动作的问题[8-9]。目前,也有学者对该类问题进行研究,提出改进控制算法,主要思路包括优化PID算法、降低PID起调量、模糊算法控制、趋近控制法等方法[10-16],主要目的是避免调节幅度过大。近年来,天然气行业高速发展,很多输气场站与上游、下游场站“背靠背”而建,它们进出站的管道水容积很小,下游稍小的流量波动就会导致上游出现较大的压力波动,因此在实现恒压控制时非常困难。
1 管容小时恒压运行难的原因
1.1 假设条件
输气站调压工艺流程及压力曲线如图1所示。在推导数学模型之前,假设管道内的气体为理想气体,气体的组分和温度不变,通过工作调压阀的流量为qV1,出站管道后端下游侧的用气流量为qV2,出站管道的气体压力为p,密度为ρ。则取图1b)中的A点,则A时刻气体状态方程如式(1)所示:

图1 输气站调压工艺流程及压力曲线示意
(1)
式中:pA——A时刻管道的平均压力;V——出站管道的水容积;mA——A时刻管道内气体的质量;Mmol——管道内气体的摩尔质量;R——普适气体常量;T——气体的温度。
经过输气时间Δt后,取图1b)中的B点,则B时刻气体状态方程如式(2)所示:
(2)
式中:pB——B时刻管道的平均压力;mB——B时刻管道内气体的质量。
从A时刻到B时刻,根据连续性方程得知:
mB=mA+ρ(qV1-qV2)·Δt
(3)
由式(1)~(3)得出式(4)如下:

(4)
由式(4)可知,B时刻的压力主要跟qV1与qV2的差值、Δt及管道的水容积V有关。
1.2 小管容下恒压难以控制的原因
若V很小,当下游突然大幅度降低输气流量时,pB在极短的时间迅速升高。如果阀门动作不及时,压力迅速偏离设定压力,甚至会导致切断阀切断而停止输气,从而造成调压周期更长,这是在输气时出现压力波动的主要原因。这种大幅度调流导致的压力波动很难控制,响应时间短,压力上升速度快。
2 步进控制原理
管存小时的恒压输气需要解决的问题有两个: 一是阀门的调节要快,当下游流量突然减小时,阀门能够快速减小开度,降低输气流量;当下游流量突然增大时,阀门能够快速加大开度,增大输气流量。二是压力控制要稳,阀门快速动作后,实际压力要尽可能地接近设定压力,阀门尽量不要频繁动作。通过PLC分析采集压力的变化规律,结合控制器来周期性调节阀门的动作幅度,通过压降速率来解决恒压输气问题。
2.1 压降速率
管道的压力变化可以使用压降速率表示,如图1b)中,定义AB点的压降速率为vΔp,结合式(4)可知:
(5)
根据式(5)可知,vΔp与流量有关,当qV1=qV2时,vΔp=0,pA=pB,此时压力不变;当qV1>qV2时,vΔp>0,pA
2.2 控制原理
步进控制原理: 在1个时间周期t内,将当前的工作调压阀的阀位增大(或减小)1个动作步长Lss的开度,检查vΔp是否满足要求,如果不满足要求,重复上述步骤,直到vΔp满足要求,阀位停止调节。受制于工作调压阀上电动执行机构的精度误差[17-19],会出现电动执行机构(执行器)不动作的情况,此时动作步长会累加到下个周期予以执行,依次循环,直到阀门执行为止。步进控制原理如图2所示,调压阀压力区间与调节对应关系如图3所示。

图2 步进控制原理示意
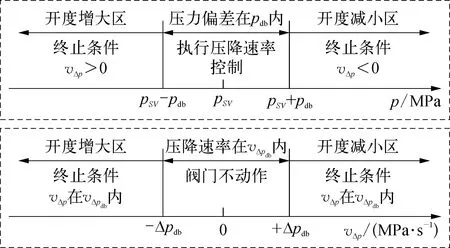
图3 调压阀压力区间与调节对应关系示意
2.3 恒压控制的工作逻辑
定义一个压力偏差pdb为压力死区和一个压降速率死区vΔpdb,假设测量压力值为pPV,恒压控制的设定压力值为pSV。控制步骤如下。
2.3.1执行压力偏差控制
该步骤目的是使得阀门快速响应,使得压力进入压力偏差区内,如图3所示。
1)当pPV>pSV+pdb,此时压力大于目标值,阀门开度需减小,使用步进控制方法调节阀门开度,直到vΔp<0后停止调节,此时qV1与qV2两者相差较小,压力缓慢下降,等待pPV缓慢趋近pSV。当pSV-pdb≤pPV≤pSV+pdb,开始执行压降速率控制。
2)当pPV
2.3.2执行压降速率控制
该步骤目的是降低vΔp,使压力变化的速度更为缓慢,避免压力波动太大。
1)当vΔp>+vΔpdb时,压降速率过大,需要减小阀门开度,使用步进控制方法减小阀门开度,直到|vΔp|≤vΔpdb,阀门停止调节。
2)当vΔp<-vΔpdb时,压降速率过小,需要增大阀门开度,使用步进控制方法增大阀门开度,直到|vΔp|≤vΔpdb,阀门停止调节。
3)当-vΔpdb≤vΔp≤vΔpdb时,压降速率在允许的范围内,阀门停止调节,同时能避免阀门频繁动作。
上述过程即可实现任意pSV下的恒压控制,最终阀门在压力死区范围内缓慢波动。由式(5)可知,当vΔp>0,pA
使用步进式控制方式,巧妙地结合了零点定理,使得阀门停止调节时的qV1和qV2的差值较小,pPV缓慢趋近于pSV。当管道水容积较小时,下游的流量调节会带来较大的压力波动,压力变化会非常快,此时一定会进入压力偏差控制,从而实现了阀门的快速响应。当阀门的工作死区较大时,阀门经过多次调节后,流量基本不变,也会导致压力偏差越来越大,会迅速进入压力偏差控制区,快速越过控制死区。实际生产过程中,输气时可能会需要调整恒压运行时的pSV,当pSV变化较大时,会直接使得阀门进入压力偏差控制,使得pPV会缓慢接近pSV,实际的供求流量差值较小,从根本上避免压力陡涨陡降的问题,从而保障输气平稳。
3 关键控制参数优化
该算法目的是使阀门处于压降速率控制区,降低阀门调节幅度,使qV1与qV2的值更为接近。现实中qV1与qV2存在一定的差值,随着时间的积累,使得pPV缓慢偏离pSV,因此允许压力在一个小范围内波动。该控制算法主要与管道水容积、允许的单次流量差|qV1-qV2|、允许的压力死区、压降速率及阀门的控制死区等参数有关。结合设备和生产实际,相关参数的确定推荐使用如下公式。
1)根据实际生产,选择pdb和|qV2-qV1|的值,通过相关参数确定压降速率控制值时的vΔpdb,然后确定压降速率控制的时间周期T2。压降速率控制值vΔpdb计算如式(6)所示:
(6)
压降速率控制时的时间周期T2计算如式(7)所示:
(7)
式中:n2≥2,一般选择2~8即可;pa——大气压力;T2——压降速率控制时的时间周期。
确定压力偏差控制时的时间周期T1,T1可以非常小,但T1越小,阀门开度变化越快。根据上述逻辑可知,当流量过大,立即进入压力偏差控制,因此选择一个|qV1-qV2|max的上限值,一般T1中的n1可以选择1~5。T1的计算如式(8)所示:
(8)
2)动作步长Lss的确定。动作步长主要与阀门自身特性有关,压降速率控制时的动作步长Lss2一般推荐为控制精度的50%左右,压力偏差控制时的动作步长Lss1约为控制精度的66.7%。
阀门在执行压降速率控制时,Lss2较小,动作周期较长;阀门在执行压力偏差控制时,Lss1略大,动作周期较短。当下游输气流量变化时,上游侧的压降速率先快速增大,后缓慢减小,最后趋于平稳,时间越长,压降速率越精准越平稳[20-21],所以压降速率控制周期不能太小,周期太小压降速率的计算值不稳定,阀门调节的次数越多,压力波动次数越多。
4 案例应用
某分输站出站管道到下游城市燃气门站撬装入口距离约100 m,出站管道管径DN250,该分输站工作调压阀前压力3.0~4.2 MPa,阀后运行压力1.5~2.1 MPa,日均输气为标准6.0×104m3,下游流量需求在1.7×103~7.5×103m3/h,出站管道水容积约为9 m3,管存非常小,工作调压阀控制精度为1%,压力上限为2.1 MPa,压力下限为1.55 MPa。早期该站只能上下游联动恒流输气,加装上述恒压算法后,实现了恒压1.75 MPa全自动分输。
参数选取: 根据生产实际,选择pdb=0.03 MPa, |qV2-qV1|=300 m3/h, |qV2-qV1|max=1×103m3/h,n2=3,n1=3,计算得出:vΔpdb=0.001 MPa/s,T2=10 s,T1=3 s,Lss2=0.5%,Lss1=0.8%。某分输站恒压控制曲线如图4所示。
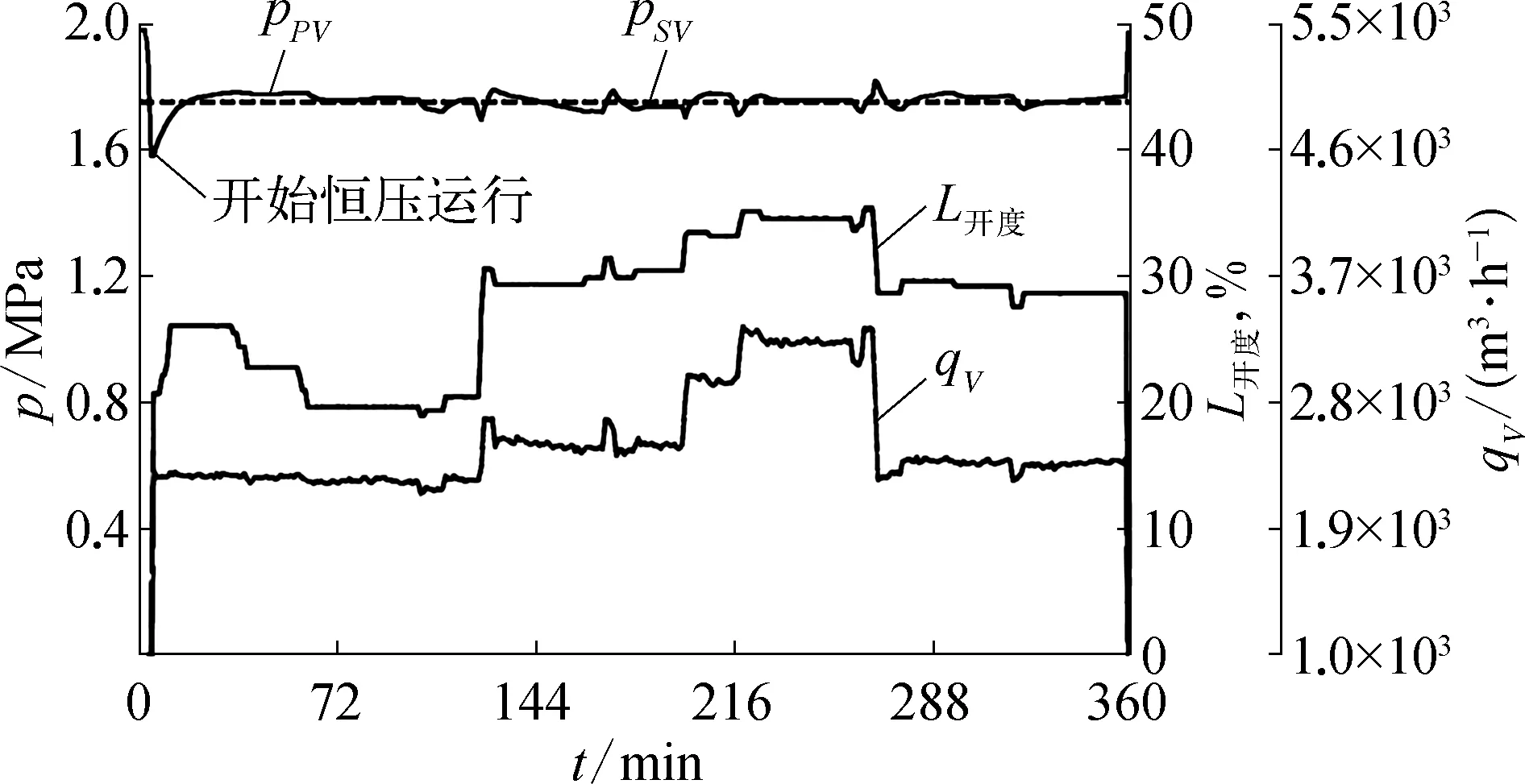
图4 某分输站恒压控制曲线示意
通过图4可知: 输气流量范围为2.2×103~3.2×103m3/h,压力波动的最小值为1.70 MPa,压力最大值为1.80 MPa。6 min开始,系统恒压1.75 MPa运行。7~14 min,执行压力偏差控制,出现拐点后阀门不再动作,压力缓慢上升。15~125 min,系统处于压降速率控制,流量约为2.2×103m3/h,压力缓慢波动。126 min时,下游突然调流到2.6×103m3/h,处于压力偏差控制,阀门迅速增大,压力缓慢上升后,由于压降速率过大,再次调节阀门开度,最终控制流量为2.6×103m3/h。270 min,下游突然将流量从3.2×103m3/h降低到2.4×103m3/h,执行压力偏差控制,阀位迅速降低,然后执行压降速率控制,压力缓慢波动。
通过图4可以看出,该算法响应时间短,阀门快速响应,能够有效控制输气时的压力,从而将出站压力波动稳定在一个较小的范围内,并且从阀门的开度变化也能看出阀门没有频繁动作。
5 结束语
本文提出了以压降速率为核心的恒压控制算法,以下游实际输气流量为目标进行控制,可始终将输气流量控制到下游的实际用气流量附近,能够很好地解决出站管容小而难以稳定恒压输气的问题。算法的快速响应能避免较大的压力波动,能够有效解决阀门切断问题,该算法原理简单,可在常规 PLC上实现,结合自动分输逻辑,非常适用于集中调度和无人值守的场景,具有较高的应用价值。