BIM 集成技术在2022 年杭州亚运会曲棍球场馆数字化建造中的应用
2023-09-12黄轩安张群力方波史月霞李文
黄轩安 张群力 方波 史月霞 李文
(1.同济大学 土木工程学院,上海 2 000921;2.浙江新盛建设集团有限公司,杭州 310006;3.浙江中南集团钢构有限公司,杭州 310051)
引言
BIM 作为连接建筑实体和数字虚体之间的技术纽带和基础,形成了建筑意识世界-数字世界-物理世界三元世界的相互促进、共同进化、共生发展,从而使得建筑业的数字化转型成为了可能[1]。BIM 集成具有广泛性价值,在BIM 集成技术支持下,数字建筑相关信息通过IFC、IDM、IFD 等数据格式,可以在数字建造的各个平台、专业等环节之间不断地映射、复合、迭代、衍生从而创造出各方所需的建造信息[2]。
1 工程概况
曲棍球比赛场馆设计灵感源于江南油纸伞,造型新颖,集“赛、健、休”于一体,是一座综合性体育场馆。曲棍球馆拥有5 000 个座位看台,顶部罩棚曲面左右对称、前高后低,最高点标高为47m,最低点标高为24m。膜曲面的水平投影最大长度,前后方向为112m。左右方向为124m。看台罩棚采用骨架式膜覆盖结构,膜覆盖在一个巨型四角落地的拱网壳结构上,膜材采用ETFE(乙烯-四氟乙烯共聚物)材质编制,轻盈漂柔,如图1 所示。

图1 曲棍球场馆室内与室外效果图
2 BIM 参数化建模
曲棍球馆结构结构设计采用四角落地拱网壳形式。结构布置的曲线网格都是通过控制曲面的上的曲线网格衍生出来的。所以必须采用BIM 技术进行参数化深化设计与建造。
2.1 BIM 参数化建模步骤
建筑几何控制系统建模:首先根据曲棍球馆建筑整体的几何控制条件,参数化导出罩棚膜曲面的边缘曲线(膜面的控制曲线),再由控制曲线导出膜控制曲面KS。其次,建立膜控制面KS 上的曲线控制网络 KM,利用曲面的法向等距映射得到等距曲面S(结构控制曲面)和等距曲线网格M(结构控制网格)。从而衍生出网壳中结构圆管中心曲线的拓扑网格。几何模型可根据几何生成逻辑,通过Rhinoceros/Grasshopper 可视化编程生成[3]。
2.2 膜控制曲线和曲面
根据方案设想,前、后两条边缘曲线是由两个直立的圆柱面RS1 和RS2 与二个倾斜平面S1 和S2 曲面求交后产生,其中RS1 与S2 相交得到L2,RS2 与S1相交得到L1。L2 为后方的椭圆曲线,L1 为前方的椭圆曲线,如图2 所示。
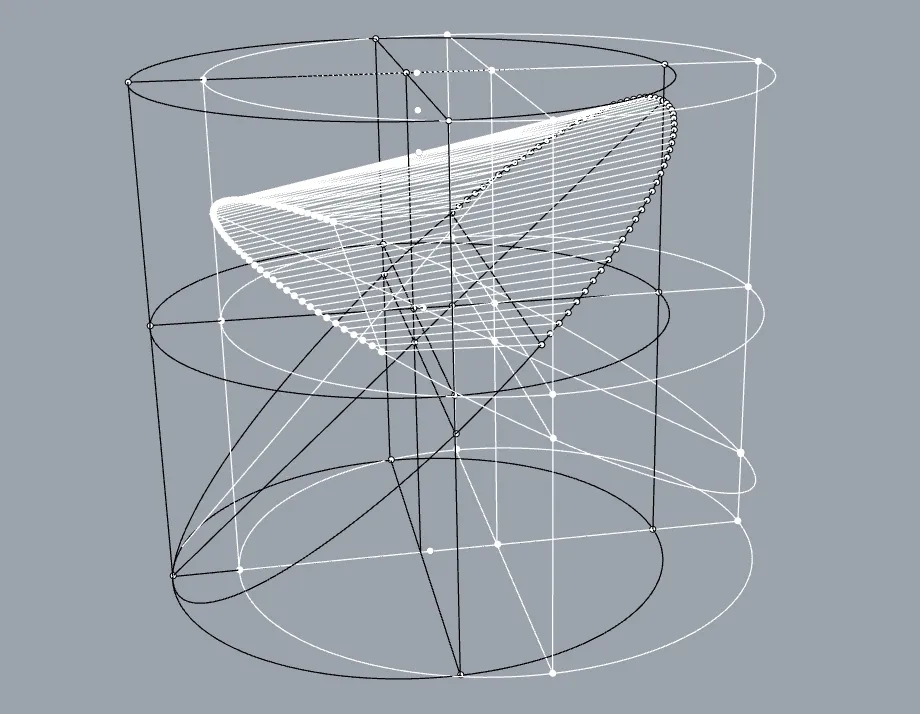
图2 边缘控制曲线
膜曲面的边曲缘线是由L1 和L2 上的部分曲线段组成的。再由建筑设计要求由控制曲线,如图3 所示,并构造出直纹曲面(膜控制曲面)KS,如图4 所示。

图3 油纸伞与直纹曲面

图4 膜控制曲面
2.3 罩棚拱网壳
在结构控制曲面S 和结构控制网格M 上衍生出网壳中布置结构圆管构件所需的中心曲线拓扑网络。
2.3.1 三角形拱桁架的建模流程为了避免构件截面过大,主拱结构采用倒三角形管桁架,三角形拱桁架中有三条曲线形弦杆(主杆),其中有两条的定位曲线在结构控制曲面S 上,另一条在S 的等距曲面Sd 上(d 为三角形截面的高),两个三角形管桁架的建模方法相同,流程都分为3 步:
(1)第一步确定结构控制曲面S 上的两条弦杆定位轴线及其上的控制点。利用选定的圆柱面与S 曲面相交,可以得到曲面S 上一条曲线,这条曲线为三角形拱桁架第一条弦杆的控制曲线。将该控制曲线按弧长分段得到点列ai,在ai 上利用S 曲面直母线上设定的欧氏距离(三角形的宽度)得到S 曲面上点列bi,点列bi 用S 曲面上的测地线连接起来就得到S 曲面上三角形拱桁架的第二条弦杆控制曲线;
(2)第二步确定等距曲面Sd 上的一条弦杆定位轴线及其上的控制点。在Sd 曲面上,对同一个i,ai与bi 位于同一条直母线上且它们的中点(ai+bi)/2=ci也在该直线上。在点列ci 上,利用曲面S 的法线向内方向上量取长度d,得到点列di,点列di 位于曲面S的法向等距曲面Sd 上。用空间插值曲线连接di 后就得到三角形拱桁架的第三条控制曲线;
(3)第三步确定三角形拱桁架腹杆的定位轴线。利用点列ai、bi、di 就可进行三角形截面拱桁架的腹杆布置,腹杆定位轴线采用直线形式。
2.4 钢罩棚内部子结构
曲棍球场馆罩棚是个非常薄的曲面形双层网壳,一般情况下其内部网格是双向弯曲的,这里却能布置出单向的桁架组,是巧妙利用了直纹曲面是由直线组成的几何特点,S 曲面上的直线本身也是S 曲面上一条测地线。这里就利用该直线进行桁架布置。由内部子结构和外部主结构组成的钢罩棚,如图5 所示。
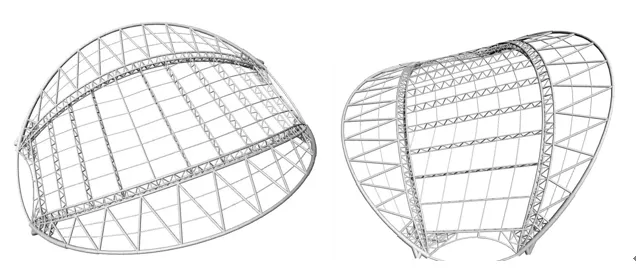
图5 罩棚结构与拱网壳
3 Tekla、Midas 深化设计与加工
将Rhino 建筑形体模型导入AutoCAD 进行数据格式转换,再通过Midas 进行结构及各工况有限元分析,最后采用Tekla 进行深化出图。通过Tekla Structures 完整的电脑虚拟预拼装过程,对全过程工况干扰情况进行了预检查,提前规避了后期项目可预见问题。在深化过程中,钢结构的杆件、节点连接、螺栓焊缝、钢构件和混凝土构件等信息都通过三维实体建模进入整体模型[4]。加工详图(包括布置图、构件图、零件图等)在软件中进行2D-CAD 图层设定,软件直接三维转二维导出施工图纸[5],如图6 所示。
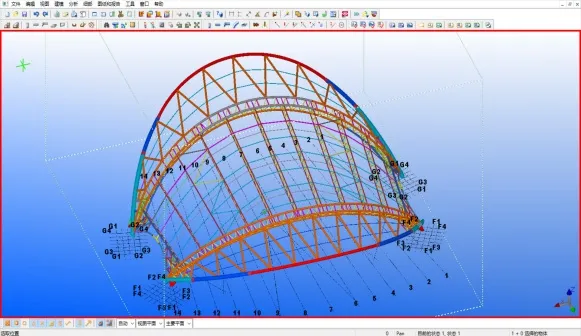
图6 Tekla 深化设计
3.1 BIM 软件间的数据交互
通过Rhino 进行膜结构空间形体基础模型建模,模型经过AutoCAD 软件转换导入Midas 及Tekla 进行膜结构受力分析及加工图深化,数据交互转换主要格式包括DWG、DXF 等。
3.2 Midas 深化结果复核
整体计算分析采用Midas Gen 有限元计算软件进行,进行以下四个方面的计算:
(1)结构静力分析。采取不同的应力比控制指标,以保证对结构安全性比较关键的构件有较大的安全储备[7];
(2)常遇地震下结构的强度及稳定性计算分析。按照弹性设计控制,地震分析方法为反应谱法;
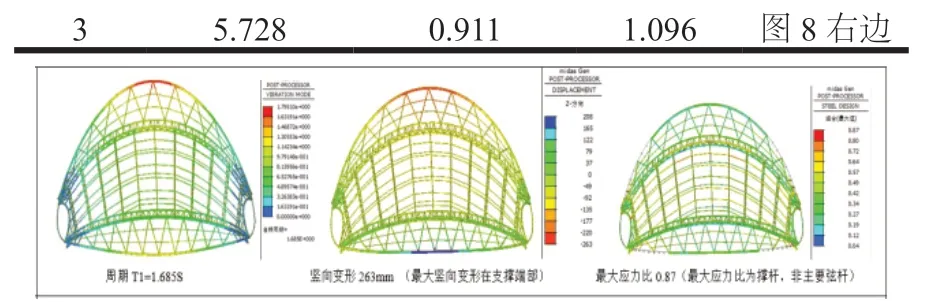
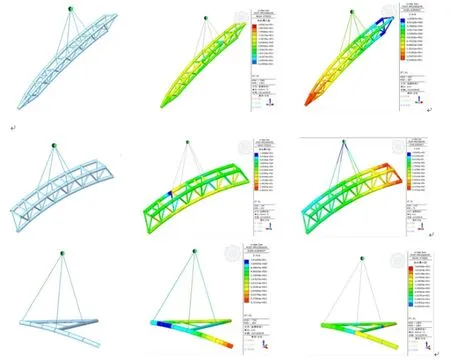
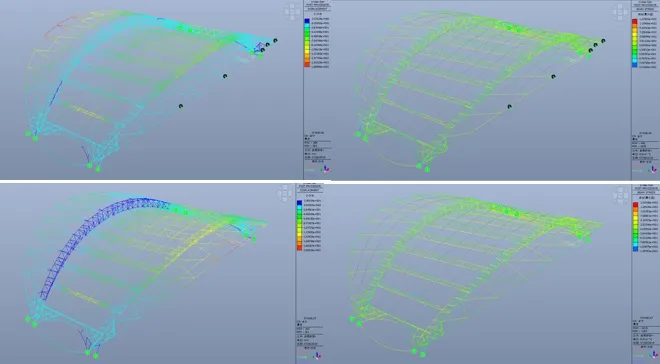
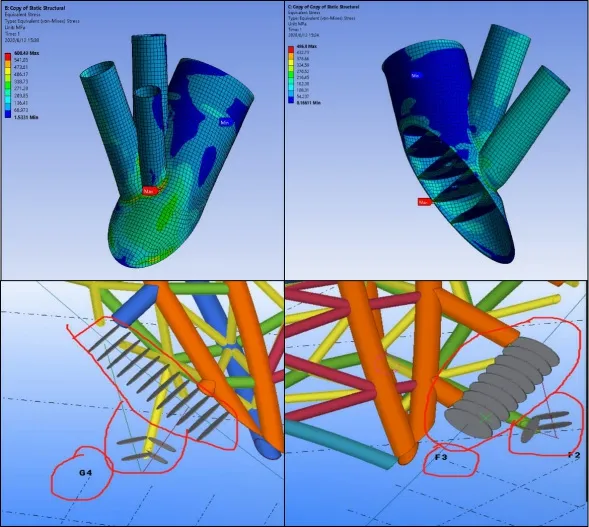
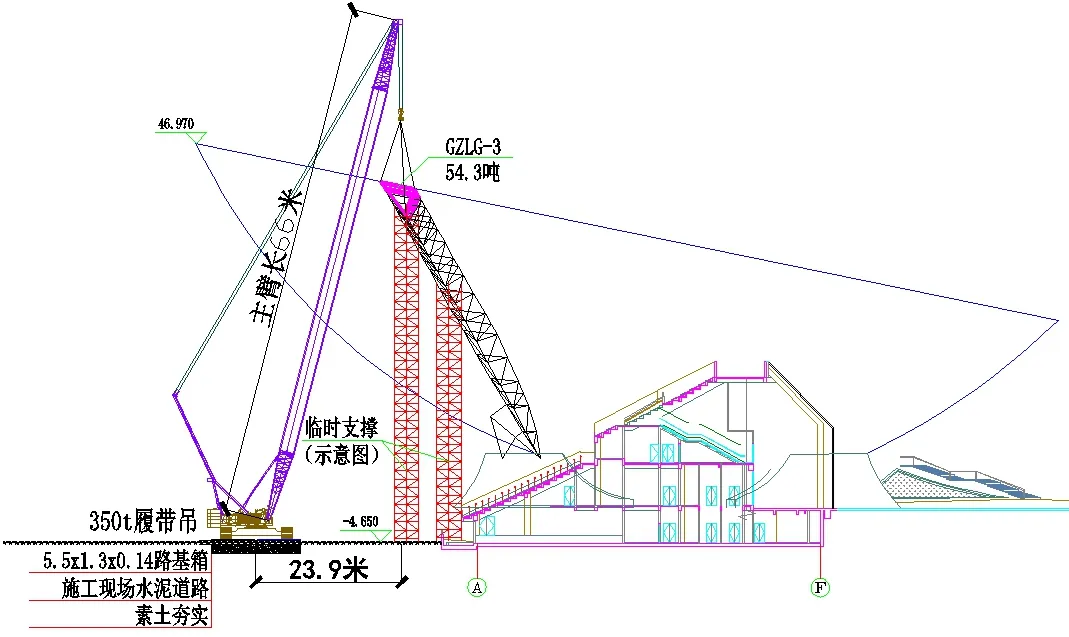
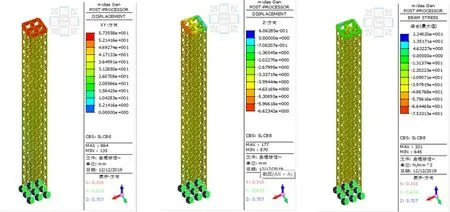
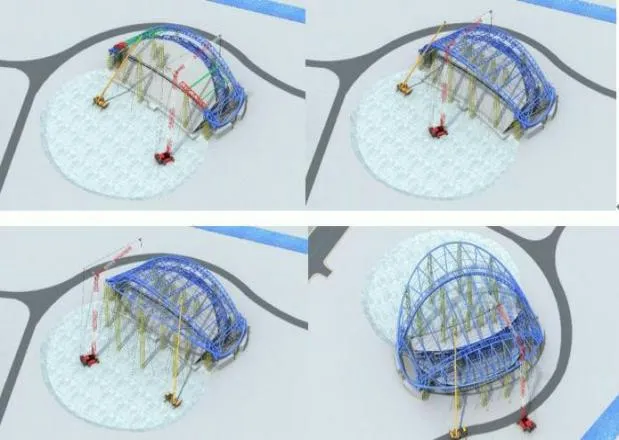
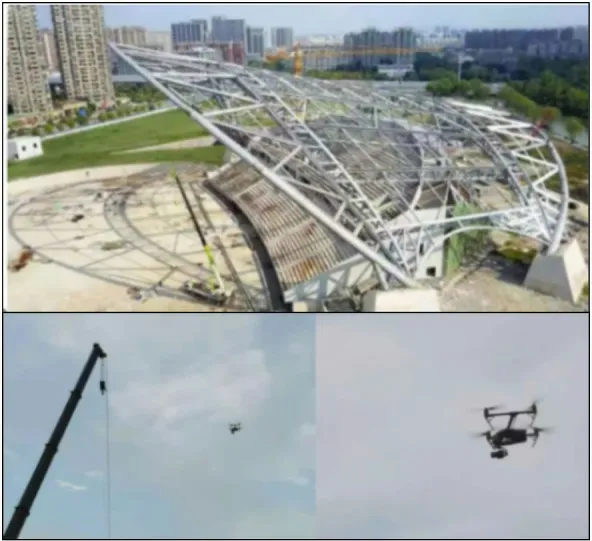
(3)位移分析。荷载以竖向荷载为主,在“1.0恒+1.0 活”组合工况作用下桁架最大挠度为263mm,桁架跨度约为120m,263mm (4)特征值分析。Midas 模型模拟了三种结构边界条件,对钢结构与混凝土支座进行了刚接、铰接、弹性连接等进行包络设计。根据MIDAS 计算所得结构振型和周期,进行曲棍球场“馆罩棚钢结构”的特征值分析计算。振型数为50 阶,前3 阶模态特征参数计算结果,如表1 所示;刚性支座三阶条件下结构前三阶模态,如图7 所示。 表1 结构前3 阶模态特征参数 图7 刚性支座三阶条件下结构前三阶模态Midas 吊装工况验算图 MIDAS Gen 进行工况验算,对结构构造设计与单元切分进行验证。对吊装过程采用静力结构分析,在对各吊装单元的内力分布分析时,采用将静载荷乘以1.4 倍的动力放大系数,而变形分析仍采用静载荷作用下的变形。Midas 分析吊装单元模型强度与变形分析图,如图8 所示。 图8 Midas 分析吊装单元模型强度与变形分析图 通过选用Midas Gen v8.75 进行结构有限元分析,荷载仅为自重(含节点自重),考虑动荷载系数1.4,曲棍球馆罩棚根据施工过程分析的Midas 云图,如图9 所示。结果显示在施工过程中,杆件的应力比最大值0.52,结构最大位移209mm,方向向下,跨度与挠度之比为1/600;结构的变形和杆件应力比均较小,可以满足施工要求。 图9 Midas 结构安全复核 罩棚的四个拱支座结构是整个结构的关键部位,拱底构件截面形式多、多管相交、杆件之间夹角较小导致相贯焊缝长,节点放样原则复杂,节点深化难度很大,无论是钢拱架底部还是型钢混凝大墩都采用二款不同系列的有限元软件进行了分析比较按包络设计。边界条件按刚接假定、铰接假定、弹性假定包络分析及优化设计,拱桁架底部钢结构Midas 有限元分析及主管内加劲板和C40 混凝土综合应力分析,如图10 所示。 图10 拱底钢、混综合应力有限元分析云图 根据桁架吊装模拟确定的分段结果进行桁架分段加工。由Tekla 模型生成结构构件加工信息,远程导入加工厂的数控中频弯管机和数控大管径相贯线切割机、自动电焊机等智能设备,进行数控下料、数控拉弯和数控焊接,以及打磨、除锈、上底漆、中漆及面漆、标注杆件标识码,安装部位标记等制作工序。 曲棍球馆施工过程工艺:钢结构施工采用“工厂或现场地面拼装成段、跨外分段吊装、高空对接合拢、结构整体分级同步卸载”的施工工艺[8]。吊装单元划分为了减少支撑体系的用量合理地使用大吨位吊车,采用分段吊装的形式。分段吊装的单元为2 榀三角拱桁架,11 榀平面次桁架和边缘拱管和连接杆件等,均采取地面拼装,高空分段吊装,分段重量控制在75t 以下,如图11 所示。屋盖吊装由一台350t 履带吊完成,其中两榀主桁架共4 个柱脚分段,履带吊吊装柱脚分段时站位可相对较近,如图12 所示。由两台80t 汽车吊支撑架安拆,拼装卸货采用三台50t 汽车吊。 图11 拱桁架分段吊装示意图 图12 履带吊吊装工况图 另外外围悬挑部分在地面拼装成分块之后吊装到位。边缘拱通过曲面内锯齿形分布的杆件与三角拱进行连接,为悬挑(帽沿状)结构,这些组件的吊装施工难度都很大。吊装高度高,吊装半径大,吊装吨位大。因此采用300履带吊配合50t汽车吊共同进行吊装施工。 为了便于节点和构件施工就位,同时考虑钢结构在吊装过程中的施工安全及结构构件卸载时所承受的最不利工况,本工程在三角拱桁架下方及边缘拱等下方设置了5 排支撑架,支撑架在钢结构施工完成之后,进行整体卸载。 仅举一例,四边形支撑架平面尺寸为1.6m×3.2m,节间高度2.2m,最大搭设高度35m,立杆及腹杆采用矩形方管,立杆规格为140mm×12mm,斜腹杆规格为80mm×10mm,水平腹杆规格为50mm×4mm,材质为Q235B;顶部转换钢梁规格为HW400x408x21x21,材质为Q235B。支撑架设计时荷载取值及组合按国家相关规范执行。图13 为支撑架水平、竖向变形及应力比云图。 图13 Midas 支撑架强度、稳定和变形分析 本工程钢结构吊装方法是利用支撑架系统配合大型履带起重机跨外分段吊装与空中对接的方式。吊装前用仪器对拱支座埋件或支撑架顶部进行测量定位,定位过程中测量出来的角度和距离偏差,通过向前后左右移动调整吊装单元的位置或其他方法进行调整,确保定位正确。吊装时,三角拱桁架分成5 段吊装,前后方向(前方向为赛场方向)的两榀三角拱桁架分别从两侧拱墩开始施工,在中间最高处合拢。再从两侧(低处)开始,对称吊装9 榀次桁架分别与前后两榀三角拱桁架进行焊接连接。最后一榀在中间(最高位与前后两榀三角拱桁架焊接连接。最后吊装边缘拱管,先施工后方边缘拱(同样也分为5段),从两侧(低处)开始对称吊装、焊接,在中间合拢。再施工前方边缘拱,方法同后面的边缘拱。 钢结构卸载时,分4 个区同时进行,采取分步等距卸载的方式,卸载时拱桁架跨度方向对称施工,卸载从中间位置开始,分别向两边交错对称施工,必须严格按照此顺序进行施工。在卸载过程中可能会有各种偶然因素对结构产生不利影响,因此在选取卸载千斤顶设备以及下部支撑脚手架的设计时,留有足够的安全储备性能。卸载工序的施工过程要严格按照施工方案执行[9]。 通过Rhino、Revit、3ds Max /Fuzor 组合应用进行钢结构吊装重难点施工交底。两种动画制作软件Fuzor或3DS Max 都对Revit 具有很好的兼容性,本工程钢结构吊装施工模拟动画采用BIM+Rhinoceros+Revit+3ds Max 软件。把BIM、虚拟现实技术和数值模拟技术相结合,将虚拟吊装过程可视化动态展示[10]。对结构的内力进行模拟分析,确定最终吊装方案。动画制作前,应对整个施工工序有清晰的认识,如图14 所示。 图14 3ds Max 虚拟施工模拟图 多源数据融合测量技术指将不同测量方法得到的信息综合起来,并对信息进行统一评估,吸取不同数据源特点,提取出统一的、更丰富的测量信息。根据现场测量控制系统,利用无人机摄影测量、测量机器人、激光扫描等组成的多源数据融合的测量技术[11],对罩棚钢结构空间位置进行高精度检测与调整。并对卸载后的钢结构进行安全监测。 BIM 模型导入到测量机器人莱卡全站仪中,机器人内部自建坐标系并计算出各个节点的三维坐标数值,以此作为控制依据,利用测量机器人对目标进行自动照准、锁定、跟踪、快速判断的功能,辅助钢构件施工关键节点和提升对接安装位置的监测与校正,避免误差积累到对接节口而造成对接困难,实时监控关键点,在多个千斤顶等设备同步微调的技术支持下确保对接口位置误差控制在限值以内,最终在测量机器人辅助下实现钢结构所有连接节点的精准对接[12]。 应用大疆”悟” Inspire 2,实时进行吊装施工监测及航空摄影测量等高空作业,如图15 所示。大疆”悟”Inspire2p 配备支持2.4/5.8GHz 的Lightbridge 高清图传系统,有效传输距离达7km,并可同时传输1080p 主相机画面及720p FPV 摄像头画面,在配合Cendence 使用时,可在4km 内实现稳定的10Mbps 码流的高画质图像传输。 图15 无人机高空作业 本工程采用 FARO ~Focus Laser 脉冲测距法技术进行激光现场扫描实体点云信息采集,数据处理可以在后台软件完成,并基于Revit 软件进行BIM 建模。结合BIM 的三维激光扫描仪可以检测和控制施工过程中的施工质量,基于点云拟合的模型避免了由于过渡的人为干预导致的二次精度的损失,从而提高了建模率和准确度[13],如图16 所示。 BIM 集成技术在本工程建造过程都发挥了重要作用,其中包括几何建模、结构分析、数字化加工、碰撞检查、管线综合、精密测量、施工模拟和方案优化等。在复杂形体大跨度钢结构数字化建造中BIM 集成技术具有无法取代地位。本文通过工程实例介绍了超大型骨架支承式膜覆盖结构BIM 集成技术建造的几个重要环节,可为今后类似工程项目的数字化建造提供借鉴。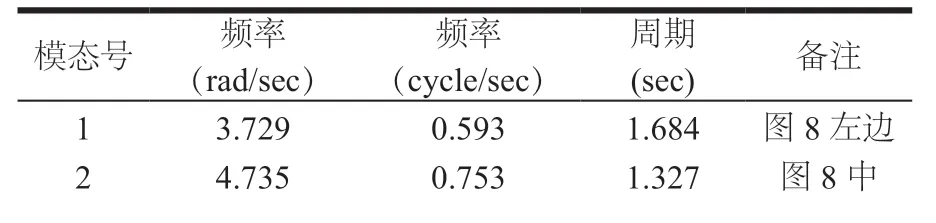
3.3 Tekla+Midas 节点分析与深化
3.4 工厂数控制造
4 BIM+机械化施工

4.1 支撑架设置
4.2 支撑架设计
4.3 钢结构吊装
4.4 钢结构卸载
5 BIM+虚拟现实
6 多源数据融合的测量技术
6.1 BIM+测量机器人
6.2 BIM+无人机
6.3 BIM+激光扫描
7 结论
