复合型移动机器人技术进展与应用前景
2023-09-11穆龙涛潘冠廷周云飞
穆龙涛,权 超,潘冠廷,周云飞
(1.陕西工业职业技术学院机械工程学院,陕西 咸阳 712000;2.复合型移动机器人陕西省高校工程研究中心,陕西 咸阳 712000;3.西安财经大学管理学院,陕西 西安 710100)
0 引言
复合型移动机器人(Compound Mobile Robots,CMRs)是一种能够在复杂环境中完成多种任务的机器人系统,具有越来越广泛的应用[1]。随着科技的不断进步,复合型移动机器人的功能和性能不断提升,成为了人工智能、机器人技术等领域的前沿研究方向之一[2]。复合型移动机器人是一类具有多种移动方式和多功能操作的机器人系统[3]。CMRs 具有高度的灵活性和适应性,可以在不同的环境中完成多种任务,在军事、医疗、救援、农业和探索等领域得到广泛应用,如图1 所示。各大高校、企业及研究院所对复合型移动机器人应用及研究的现状,如表1 所示。
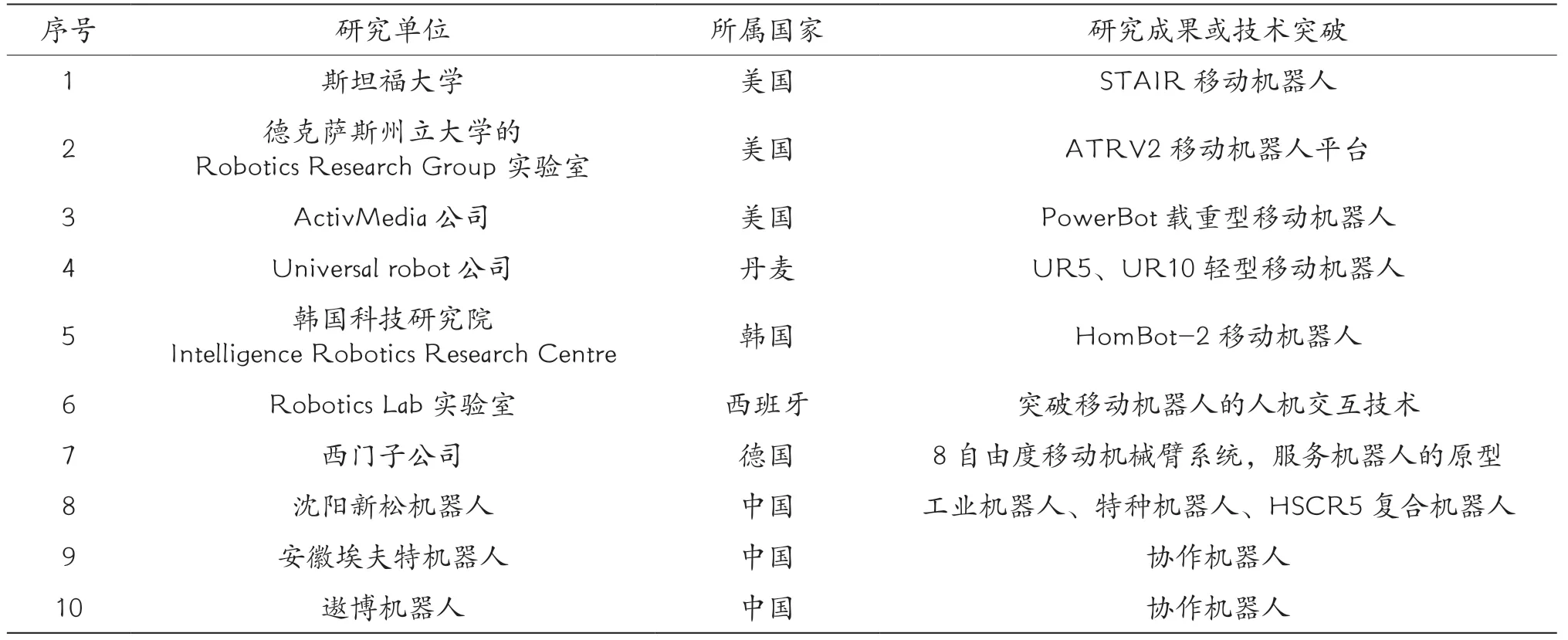
表1 复合型移动机器人发展状况及发展趋势

图1 复合型移动机器人案例
复合型移动机器人在农业领域的应用可以大大提高农业生产效率和农产品质量[4]。通过利用先进的技术,这些机器人可以实现精准农业,如精准施肥、精准喷药、精准种植等,从而使农作物得到更好的生长和发展,减少浪费和损失。与传统农业方法相比,复合型移动机器人可以更快速、更准确地完成工作,同时减少对人力资源的依赖,提高农业生产效率和经济效益。此外,这些机器人可以自主运行,避免了人为因素对农业生产的影响,从而确保了农业生产的稳定性和可靠性。因此,复合型移动机器人在农业生产中的应用前景非常广阔,将对农业生产的可持续发展和现代化转型起到重要的推动作用。
复合型移动机器人系统可以在不同环境下执行各种任务[5],其中包括核电站的检测和维护、搜救任务、灾难响应、探测和检查以及农业应用等。这些机器人系统都配备了先进的传感器和视觉系统,以帮助机器人感知周围环境并执行任务。系统多由一个轮式底盘和一个可伸缩的机械臂或腿组成,可以适应不同的地形和环境条件[6]。同时,这些系统还配备了一套视觉和传感器系统,以帮助机器人感知周围环境并进行精确的操作[7]。相关文献提供了有关复合型移动机器人系统的设计、控制和实现的详细信息,为未来的研究和开发提供了重要的参考[8-15]。
本文将从复合型移动机器人的概念和分类、技术特点、应用以及未来研究方向等方面进行综述。其中,第一部分主要介绍了复合型移动机器人特点及分类;第二部分重点介绍了其核心技术,包括定位与导航、路径规划、协同控制、多传感器融合等;第三部分对复合型移动机器人在不同领域中的应用进行了综述。最后,对未来研究方向进行了探讨及展望。
1 复合型移动机器人的特点及分类
复合型移动机器人是一种由多个移动机器人组成的系统,通过协同工作实现特定的任务。它可以根据需要进行组合,形成不同的结构和功能,具有良好的灵活性和可扩展性[16]。CMRs 的应用领域将会越来越广泛,包括军事、医疗、救援、探索、制造等领域;同时,CMRs 的控制系统、设计和制造技术也将不断创新和完善,为CMRs 的应用提供更好的支持和保障。
1.1 复合型移动机器人的特点
1)多种移动方式。传统的移动机器人通常只具备一种或有限的移动方式,如轮式、履带式或腿式等。而CMRs 结合了多种移动方式,包括轮式、履带式、腿式、飞行器、水下机器人等。这种多样性使得CMRs 能够适应不同的地形和环境,具有更广泛的应用前景。
2)多功能操作。CMRs 可以进行多种任务,如侦察、救援、运输、勘探、维护等。在军事领域,CMRs 可以被用于侦察和搜寻任务,可以在危险的环境中执行任务,如炸弹拆除、边境巡逻等。在医疗领域,CMRs 可以被用于手术和康复等任务。在探索领域,CMRs 可以被用于探索行星、极地和深海等环境。
3)多元化的控制系统。CMRs 具有多种移动方式和多功能操作,需要一个高效、稳定的控制系统。研究人员利用先进的控制算法和传感器技术,开发了多控制器、分层控制、协同控制等控制策略,以实现CMRs 的高效控制。
4)创意设计和制造。CMRs 的设计和制造需要考虑多种因素,如机器人体积、质量、能量和耐久性等。为了满足多种任务需求,研究人员在机器人的设计和制造中采用了多种材料和技术,如3D 打印、纳米技术、智能材料等。
1.2 复合型移动机器人的分类
根据不同的组合方式和任务要求[17],复合型移动机器人可以分为以下几类:
1)单元式复合型移动机器人。单元式复合型移动机器人是由多个相同或相似的机器人单元组成的系统,每个单元可以独立工作,也可以通过无线通信协同工作,完成特定的任务。这种机器人系统结构简单,易于实现,具有良好的可扩展性和适应性。例如,由多个小型机器人组成的探测器可以在火灾等危险环境中进行探测和救援。
2)模块式复合型移动机器人。模块式复合型移动机器人是由多个不同类型的机器人模块组成的系统,每个模块具有不同的功能和任务。这种机器人系统具有较高的智能化和灵活性,可以根据需要进行组合和重构,以适应不同的任务需求。例如,由多个机械臂、移动平台和传感器组成的机器人系统可以完成物料搬运、工件加工和检测等工作。
3)混合式复合型移动机器人。混合式复合型移动机器人是由多个不同类型的机器人组成的系统,包括单元式机器人和模块式机器人。这种机器人系统具有较高的灵活性和可扩展性,可以根据需要进行组合和重构,以适应不同的任务需求。例如,由多个移动机器人和飞行器组成的系统可以完成地面和空中的联合侦察和监测任务。
2 复合型移动机器人的核心技术
复合型移动机器人的核心技术包括定位与导航、路径规划、协同控制、多传感器融合等[18-19]。
2.1 定位与导航
复合型移动机器人需要精确的定位和导航技术,以实现准确的运动控制和任务执行。目前,常用的定位和导航技术包括惯性导航、全球定位系统(GPS)、视觉导航、激光雷达等。其中,惯性导航具有高精度、高可靠性和实时性好等优点,但存在积累误差和漂移等问题;GPS 具有全球覆盖、定位精度高等优点,但在室内和城市峡谷等环境中有信号遮挡和干扰等问题;视觉导航可以通过摄像机等传感器获取环境信息,可以实现室内和室外的定位和导航,但对光照、阴影等影响较大;激光雷达可以对环境进行高精度的三维测量,可以实现避障、地图构建等功能,但成本较高。
2.2 路径规划
复合型移动机器人需要进行路径规划,以实现特定任务的路径规划和避障。目前,常用的路径规划算法包括A 算法、D 算法、RRT 算法等。其中,A 算法具有较高的搜索效率和较小的内存消耗,但对环境的障碍物要求较高;D 算法可以在动态环境中实现路径规划,但计算复杂度较高;RRT 算法可以实现高效的路径规划和避障,但对机器人的动态响应和控制精度要求较高。
2.3 协同控制
复合型移动机器人需要进行协同控制,以实现多机器人之间的协同工作和任务分配。目前,常用的协同控制算法包括分布式控制、集中式控制、博弈论控制等。其中,分布式控制具有较高的灵活性和稳定性,但需要考虑通信延迟等问题;集中式控制可以实现较高的控制精度和效率,但对通信带宽和计算能力要求较高;博弈论可用于研究决策者在相互影响的环境中做出决策的理论,博弈论控制可以实现多机器人之间的协同决策和资源分配。
2.4 多传感器融合
多传感器融合技术是复合型移动机器人实现环境感知和任务执行的关键技术。它通过使用多种传感器,如视觉传感器、激光雷达、超声波传感器等,对机器人周围的环境进行感知和建模,并将不同传感器获得的信息进行融合,提高机器人的感知能力和执行效率。
3 复合型移动机器人在不同领域中的应用和未来研究方向
3.1 不同领域中的应用
复合型移动机器人具有广泛的应用前景,在农业、医疗、环境监测等领域中得到了广泛的应用[20]。下面将对其中几个领域的应用进行简要介绍。复合型移动机器人应用场景,如图2 所示。

图2 复合型机器人应用场景
1)农业领域。复合型移动机器人在农业领域中的应用主要包括农作物种植、喷灌、施肥和病虫害防治等。例如,由多个移动机器人和机械臂组成的系统可以在大田中完成自动化的种植、喷灌和施肥等工作,提高生产效率和质量。一些移动机器人还可以配备高精度的传感器和视觉系统,以检测和识别农作物的病虫害,从而提供精确的防治措施。这些机器人系统可以减少人工操作的劳动力和成本,同时提高农业生产的效率和可持续性,对于解决未来农业生产中的问题具有重要意义。
2)医疗领域。复合型移动机器人在医疗领域中的应用主要包括手术辅助、康复训练和生命救援等。例如,由多个移动机器人和传感器组成的系统可以在手术中进行定位和导航,实现精准的手术操作和快速恢复。移动机器人还可以用于康复训练,例如在物理治疗中,机器人可以帮助患者进行肌肉锻炼和运动训练,促进康复和恢复。在生命救援方面,移动机器人可以通过远程监测和控制,实现自动化救援和抢救工作,提高救援效率和成功率。这些机器人系统可以减少医疗人员的负担和劳动强度,同时提高医疗服务的质量和效率,对于人类健康事业具有重要意义。
3)环境监测领域。复合型移动机器人在环境监测领域中的应用主要包括大气污染、水质监测和垃圾清理等。例如,由多个移动机器人和传感器组成的系统可以在城市中进行空气和水质监测,实现及时的环境污染监测和应急处理。移动机器人还可以用于垃圾清理,例如在海滩、公园等场所,机器人可以帮助清理垃圾和污染物,保持环境的清洁和卫生。这些机器人系统可以减少人工操作的劳动力和成本,同时提高环境监测和清理的效率和精度,对于环境保护和可持续发展具有重要意义。
3.2 未来研究方向
复合型移动机器人的未来研究方向包括提高机器人的感知能力、智能化水平和协作能力,以实现更加复杂和多样化的任务。具体包括以下几个方面:
1)多模态感知技术。多模态感知技术可以提高机器人的感知能力和环境建模精度,包括视觉、声音、力量等多种感知模态的融合和处理。
2)自主学习技术。自主学习技术可以提高机器人的智能化水平和适应性,包括深度学习、强化学习等算法的应用和优化。
3)协同控制技术。协同控制技术可以提高机器人的协作能力和任务分配效率,包括分布式控制、群体智能等算法的应用和优化。
4)跨平台集成技术。跨平台集成技术可以提高机器人的可扩展性和通用性,包括机器人操作系统、通信协议等技术的研究和开发。
复合型移动机器人在不同领域的应用具有广阔的前景,但目前还存在一些问题需要解决。包括运动控制、传感器融合、任务分配、机器人智能化、安全性和能源管理等问题。解决这些问题可以提高机器人的性能和工作效率,促进机器人的发展和应用。待解决的问题包括以下几个方面:
1)运动控制问题。如何通过多个运动部件的协同控制,使复合型移动机器人实现高效稳定的移动。
2)传感器融合问题。如何将多种传感器信息进行融合,提高复合型移动机器人的感知能力和环境适应性。
3)任务分配问题。如何根据任务需求和机器人自身能力,合理分配并协同完成任务。
4)机器人智能化问题。如何通过自主学习、计算机视觉等技术,提高机器人的智能化水平,实现更加智能化的移动和操作。
5)安全性问题。如何保证复合型移动机器人在移动和操作过程中的安全,防止意外事故发生。
6)能源管理问题。如何通过优化机器人能源管理,延长机器人的使用寿命,提高机器人的工作效率。
4 结语
本文综述了复合型移动机器人的发展历程、技术特点以及研究现状。复合型移动机器人作为一种能够在复杂环境中完成多种任务的机器人系统,具有越来越广泛的应用前景。要提高机器人的工作效率,未来的研究方向应包括提高机器人的感知能力、智能化水平和协作能力,以实现更加复杂和多样化的任务。
