SWOT卫星对青海湖的水位监测潜力研究
2023-09-09熊景华郭生练姜丽光尹家波王俊
熊景华,郭生练,姜丽光,尹家波,王俊
1.武汉大学 水资源与水电工程科学国家重点实验室,武汉 430072;
2.南方科技大学 环境科学与工程学院,深圳 518055
1 引言
青藏高原被称为“地球第三极”,平均海拔高度超过4000 m,中国境内部分总面积达250万km2,约占中国总面积的27%,是世界海拔最高,中国面积最大的高原(张镱锂 等,2002)。青藏高原还被称为“亚洲水塔”,截至2018 年,分布有约1400 个面积大于1 km2的湖泊,其总面积超过全国湖泊总面积的50%,对中国西部及其周边地区数十亿人的生存和发展具有重要作用(Wan 等,2016;Pritchard,2017;Zhang 等,2021)。然而,最近40 年青藏高原经历了剧烈的气候变化过程,该区域降雨和气温上升速率远高于全球平均水平,导致冰川融化、冻土消融、极端暴雨等现象频发(Zhang 等,2011,2021)。由于受人类活动影响较小,青藏高原湖泊成为反映全球变暖的“放大器”和“指示器”,其数量、面积和水位主要受自然因素驱动,总体上保持稳定增长(Yao等,2012;张国庆,2018;廖静娟 等,2020;朱立平 等,2020;张国庆 等,2022)。因此,监测青藏高原湖泊变化对于理解该地区气候变化、生态环境变化,水循环过程和水资源管理具有重要意义。湖泊水位作为反映湖泊水文状态最重要且易于监测的指标,通常与湖泊水量、水面面积具有稳定关系(Xiong等,2021)。然而,由于该地区地理位置偏远、自然环境恶劣、且经济水平落后,布设实测水文站点难度大,导致缺乏长期连续的湖泊水位监测数据(张国庆,2018)。
在实测水位数据稀缺的情况下,测高卫星成为监测青藏高原湖泊水位的重要补充手段。星载测高仪可分为两类:雷达测高卫星和激光测高卫星。自从1991 年欧洲航天局发射第一颗ERS 系列卫星以来,近30年已经有Topex-Poseidon系列(包括T/P,Jason-1/2/3)、Envisat、Saral和中国的海洋(HY)系列等多颗脉冲式雷达测高卫星支持了大量对于青藏高原湖泊水位监测的研究(Liao 等,2014;Song 等,2014;Kleinherenbrink 等,2015;Crétaux 等,2016)。例如,Hwang 等(2016)使用Topex-Poseidon 家族卫星数据成功监测了青藏高原23 个湖泊1993 年—2014 年的水位变化;Jiang 等(2017)使用Cryosat-2 数据捕捉到了2003 年—2015年青藏高原70个面积大于100 km2的湖泊的水位异常上升趋势。然而,尽管传统脉冲式雷达测高卫星可以提供长序列湖泊水位数据,其轨道相对陆地水体较为稀疏,难以覆盖大部分小型湖泊;此外,其雷达回波经常受到湖泊周围地形和湖面结冰的影响,具有较大不确定性(Yuan 等,2017)。激光测高卫星可以克服上述缺点,其轨道空间覆盖率高,测距精度好,可以实现对青藏高原小型湖泊水位变化的准确观测(Zhang 等,2017,2019a,2021;Jiang 等,2020)。例 如,Wang 等(2013)使用ICESat/GLAS 卫星数据发现2003年—2009年青藏高原56个大型湖泊中的18个具有水位下降趋势,其余38 个呈现上升趋势,其变化速率在-0.51—0.62 m/a波动。Zhang等(2019a)融合了ICESat与ICESat-2卫星数据,发现2003年—2013 年期间青海湖的卫星反演水位与实测值的相关系数达到0.95,均方根误差为0.1 m,包括青海湖在内的62个大型湖泊的平均水位以0.28±0.03 m/a的速率上升。尽管激光测高卫星的发展扩大了可监测湖泊数量,并具有良好的观测精度,但其重访周期较长(~1 年),难以捕捉到青藏高原湖泊的季节性水位变化,限制了对青藏高原湖泊的多时相、高频率监测(Ma 等,2016,2019;Xu 等,2022)。
作为未来10 年NASA 承担的地球科学重点项目,SWOT(Surface Water and Ocean Topography)卫星通过搭载的Ka 波段雷达干涉计(KaRIn),实现对海洋表面和陆地水体高程的二维连续监测。与传统的雷达测高或激光测高卫星相比,SWOT卫星具有高精度(10 cm)、高时间分辨率(~22 天)、高空间覆盖率(77°S—77°N 90%的陆地水体)和分辨率(像素云尺度)、大测绘幅宽(120 km)等优势(Biancamaria 等,2016),能够对面积大于250 m×250 m 的湖泊实现有效监测。SWOT 卫星是由NASA、法国空间研究中心(CNES)、英国航空局(UKSA)和加拿大航空局(CSA)合作的国际项目,计划于2022年11月15日发射,设计寿命为3 年。尽管距离SWOT 卫星的发射还有一段时间,许多学者已基于其设计参数进行在轨模拟,以获得类SWOT观测数据,该方法已在海平面变化、水文模拟、湖泊监测等领域引起强烈反响(Biancamaria等,2016;Solander等,2016)。例如,Bonnema和Hossain(2019)使用NASA JPL 开发的SWOT 水文模拟器对湄公河流域20 个水库进行精度评估,发现其对其中17 个水库的水量估算误差在8%以内,监测效果良好。Elmer 等(2020)将CNES 开发的SWOT水文模拟器与WRF-Hydro水文模型进行耦合,以阿拉斯加切纳河和尼纳纳河为例验证了SWOT的水位监测效果。考虑到SWOT卫星对于内陆水体的优异监测性能,其对陆地水文学和海洋水文学的发展具有里程碑式的意义。然而,未来SWOT卫星对青藏高原湖泊群的水位监测潜力尚且未知。
鉴于此,本文以中国最大的内陆咸水湖:青海湖为例(图1),基于CNES 开发的SWOT 水文模拟器,使用多源遥感卫星识别的湖泊边界和水位作为输入数据,模拟得到青海湖2010 年—2018 年的类SWOT水位数据,并通过与实测资料对比评估SWOT卫星的水位监测潜力。
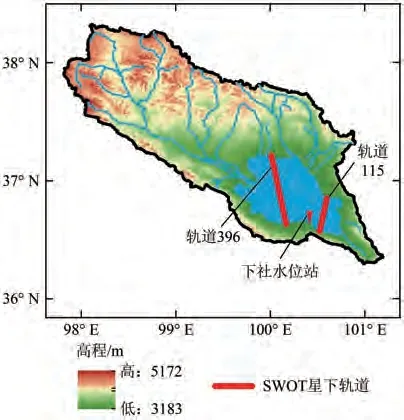
图1 青海湖流域地理位置及SWOT卫星地表轨道分布Fig.1 Location of Qinghai Lake and the ground tracks of SWOT satellite
2 数据与方法
2.1 研究区
青海湖位于青藏高原东北部(99°36'E—100°47'E,36°32'N—37°15'N),是中国最大的内陆咸水湖,其2019年的年平均水位为3195.97 m,面积增加到4486.1 km2,总蓄水量为87.63 km3(孙永寿 等,2021)(图1)。青海湖水位和水面面积自2004 年以来持续上升,对周边生态环境、水利枢纽工程安全和当地居民生活造成了极大影响(程俭等,2021)。青海湖流域集水面积29661 km2,其地处青藏高原高寒区、中国东部季风区和西北干旱区交汇带,属于高原半干旱气候,多年平均气温和降水量分别为-0.21℃和374.5 mm,多年平均蒸发量达1005 mm。青海湖流域作为对全球气候变化响应最敏感的区域之一,对青藏高原的生态、水文和人类生存环境具有重要指示作用(冀钦 等,2018)。
2.2 数据
(1)湖泊掩膜数据。以张国庆(2019)发布的青藏高原面积大于1 km2湖泊边界数据集为基础,选取青海湖作为SWOT水文模拟器的输入文件。该数据集基于长序列Landsat 卫星遥感数据,制作了青藏高原近50年(1970s—2018年)共12期湖泊观测产品,其精度通过了多源遥感卫星及水资源公报的对比验证,具有可靠性(Zhang等,2019b)。
(2)光学水位数据。使用Li 等(2019)发布的青藏高原高分辨率湖泊水位变化数据集,获取2010年—2018年青海湖的光学水位数据作为SWOT模拟器输入。该数据集基于Landsat 影像识别的湖泊岸线与多个测高卫星(Envisat、Jason-1/2/3、CryoSat-2)观测结果之间,建立湖泊“水位—水面面积”关系,然后使用高分辨率的Landsat 5/7/8卫星影像估算湖泊水位变化,并通过野外实验验证数据集精度。该光学水位数据集可为青藏高原湖泊的水位监测提供参考,近年来得到了广泛运用(Huang等,2020)。
(3)雷达测高水位数据。使用DAHITI(Database for Hydrological Time Series of Inland Waters)提供的2010 年—2018 年青海湖雷达测高水位数据作为SWOT模拟器输入,与光学及观测水位驱动结果进行对比,分析SWOT模拟器对输入水位数据的敏感性。DAHITI 是德国慕尼黑工业大学地质研究所发布的雷达测高卫星产品(https://dahiti.dgfi.tum.de[2021-08-29]),其融合了包括Envisat、Sentinel-3a和Sentinel-3b等多种卫星数据,可提供全球365个内陆湖泊的长序列水位数据,近年来得到了广泛应用(Schwatke 等,2015)。青海湖区域的测高数据则来自于Envisat 卫星(2010 年—2011 年)、Saral 卫星(2013 年—2016 年)和Sentinel-3A 卫星(2017年—2018年)。
(4)水位数据。为了验证类SWOT 水位数据,采用青海湖下社水位站2010 年—2018 年的逐日水位实测资料,并选择与SWOT卫星过境日期一致的数据进行对比。实测数据经过了异常值剔除和质量监测,数据质量已在前人研究中得到验证(杜嘉妮 等,2020)。
(5)重力卫星和水位模型数据。使用GRACE(Gravity Recovery and Climate Experiment)重力卫星和WaterGAP 全球水文模型(WGHM)数据估算的地表水储量变化与基于“水位—水面面积”估算的类SWOT湖泊水量数据进行对比,评估SWOT卫星监测青海湖水量变化的表现。2003 年—2017 年的逐月GRACE 卫星数据由美国德克萨斯大学奥斯汀分校空间研究中心(UTCSR)提供,http://www2.csr.utexas.edu/grace [2021-08-29],其为最新版(v02)的mascon 方案,该产品以0.25°的空间网格的形式分发,由于不需要进行高斯滤波和去相关滤波等步骤,相比球谐系数方法具有更高的信噪比。因CSR 产品将120 km 的正六边形mascon 空间重采样为0.25°网格,不可避免存在信号泄露和偏差,故将原始mascon 中的质量异常重分配至湖泊内部以恢复泄露信号,该方法的可靠性已在里海得到了验证(Chen 等,2017)。为了从GRACE 数据中分离出地表水储量成分,将其扣除了WGHM模型模拟的土壤水、地下水、雪水当量和植物冠层水量,与类SWOT 水量变化数据进行对比分析。与常用的全球陆地数据同化系统GLDAS(Global Land Data Assimilation System)相比,WGHM 水文模型耦合了大量灌溉、牲畜、生活用水和地下水开采等用水模型,可以准确地模拟地表水和地下水成分的变化过程,该模型模拟的陆地水储量变化代表性更强。最新版本的WGHM-v2.2d 模型由德国法兰克福大学提供,时间分辨率为月,空间分辨率为0.5°(Schmied等,2021)。
2.3 方法
SWOT 卫星是由NASA、CNES、UKSA 和CSA合作的国际项目,预计2022 年11 月发射,经过6 个月的轨道标定和校准阶段后开启设计时限为3年的在轨运行。SWOT 的核心设备为Ka 波段雷达干涉计(KaRIn),其测绘幅宽为120 km,采样频率为35.75 Ghz,并搭载了Poseidon-3 雷达高度计(表1)。
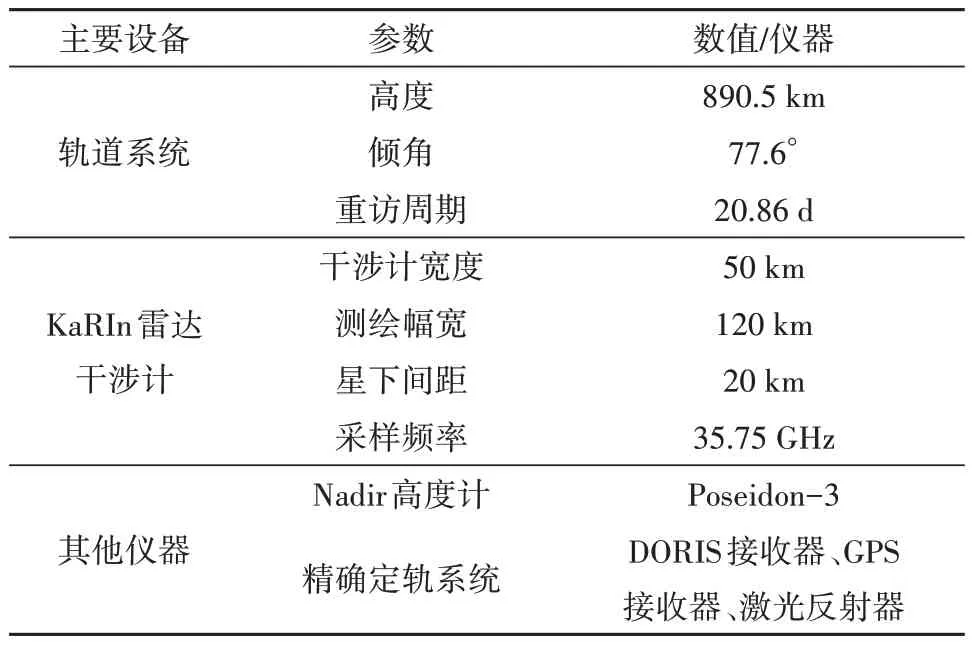
表1 SWOT卫星主要设备设计参数(Biancamaria等,2016)Table 1 Main instrument parameters of SWOT mission(Biancamaria et al.,2016)
本研究使用CNES 开发的大尺度SWOT 水文模拟器,模拟青藏高原湖泊的类SWOT水位。基于简化的地理定位方程和球形地球假设,SWOT模拟器可以模拟SWOT 卫星对陆地水体的高速(Highrate)观测模式,从而生成像素云(Pixel cloud)尺度的水位高程数据。SWOT模拟器考虑了随机白噪声和暗水效应(dark water effect)对水位观测的影响,同时能够模拟卫星位置不确定性、地理定位误差和大气干湿对流层效应。然而,由于忽略了植被的空间差异性和地形顶底效应,可能导致模拟结果不确定性增大,特别是对青藏高原这样地形条件复杂的区域(Elmer 等,2020)。虽然SWOT 模拟器缺乏完整的误差模拟机制,但其性能足以支撑陆地水文学研究和应用,并已在世界多地得到验证(Bonnema和Hossain,2019;Ottlé等,2020)。
SWOT模拟器仅要求输入湖泊掩膜和参考高程数据,其分别来自Landsat 光学影像和光学及雷达测高水位数据(Li 等,2019;张国庆,2019)。以青海湖为研究对象,以2010 年—2018 年为模拟时段,选取卫星过境日期前后3天的光学水位和雷达测高水位分别作为参考高程输入SWOT模拟器,按照以下步骤进行模拟(图2):
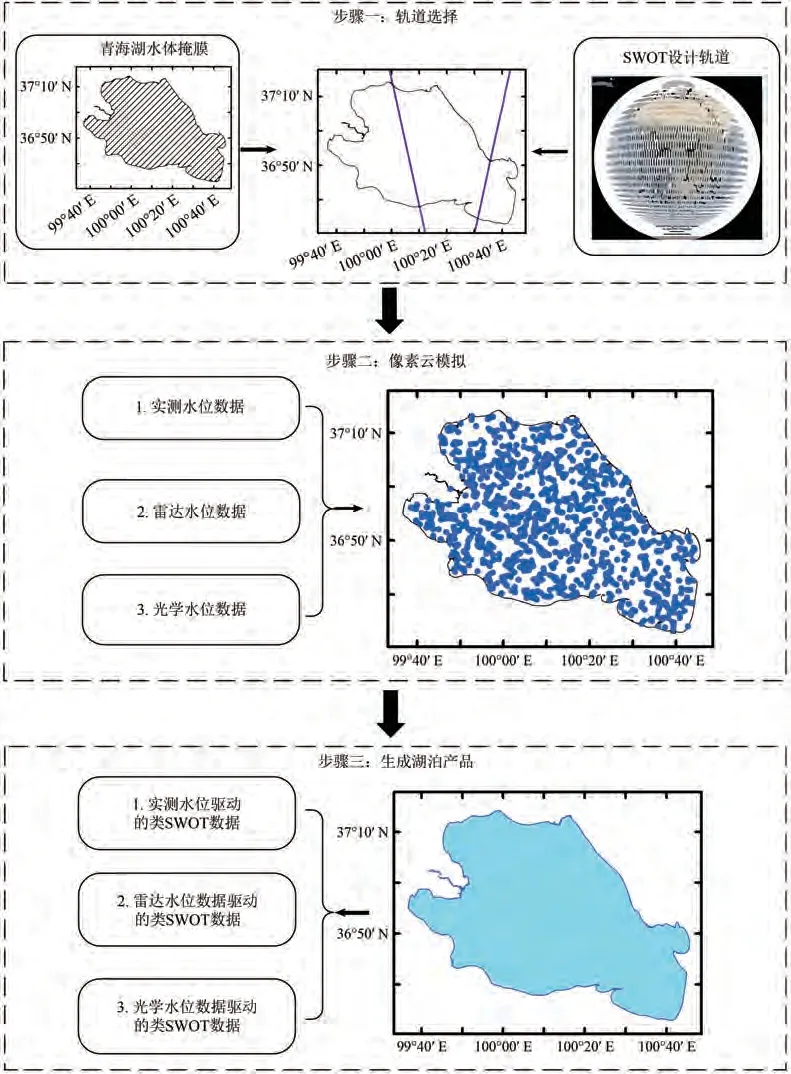
图2 SWOT模拟器流程图Fig.2 The flowchart of the SWOT simulator
(1)轨道选择。设置SWOT卫星运行时间和研究区范围,选择研究时段内的过境轨道。
(2)像素云模拟。基于湖泊掩膜和参考高程输入资料,生成像素云尺度的类SWOT水体高程观测数据。
(3)生成湖泊产品。通过链接CNES 发布的先验全球湖泊数据库(LOCNES),基于类SWOT 像素云数据生成类SWOT湖泊产品。
将类SWOT水位和实测结果及输入水位进行对比分析,评价SWOT卫星的水位监测效果,评价指标包括相关系数(r)、纳什效率系数(NSE)和均方根误差(RMSE/m),计算公式如下:
式中,Hs和Ho分别代表类SWOT 水位和观测水位,Hˉs/Hˉo则为两者平均值的比值;n为2010年—2018年期间的有效水位个数。基于青海湖“水面面积—水位”关系,使用类SWOT水位估算青海湖水面面积,并进一步估算湖泊储水量变化(Taube,2000;Li等,2019):
式中,H(m)和为类SWOT水位;S(km2)为青海湖水面面积估算值;V(km3)为2010 年—2018 年期间青海湖储水量变化值。为了与GRACE 数据对比,已将类SWOT 水量变化扣除2010 年—2018 年期间的长期平均值。
3 结果与讨论
3.1 水位误差分析
为了分析SWOT 模拟器对输入数据的敏感性,分别使用2010 年—2018 年青海湖实测水位、光学水位和雷达测高水位数据驱动SWOT模拟器,其时间序列及不确定性如图3 所示。类SWOT 水位在不同驱动数据情景下均能捕捉青海湖水位变化,但不同水位数据驱动的类SWOT数据之间仍存在一定差异。例如,相较于实测水位,雷达测高数据在2011 年之前体现了较大的偏差,其可能是由于Envisat运行末期SGDR数据质量较差,进而导致了其驱动的类SWOT 结果不能很好地捕捉实际水位。雷达测高数据在2016 年之后和实测水位相比呈现了整体性偏移,可能是因为DAHITI 产品采用了新的Sentinel-3A 数据的系统性偏差导致的。另外,光学水位整体上与实测水位变化较为一致,但在2013 年之前受到Landsat 5 卫星太阳能阵列驱动器损坏的影响,数据质量较低,导致光学水位及其驱动的类SWOT 数据体现了明显的波动(Zhu 等,2014)。总体而言,SWOT 模拟结果平均不确定性分别为0.32 m(实际水位),0.27 m(光学水位)和0.24 m(雷达水位),不同数据驱动下的类SWOT变化区间均能覆盖真实水位。图4进一步分析了类SWOT水位年内变化。实测水位驱动结果仅在丰水期(6—11月)体现良好的精度,在枯水期(12月至次年6月)则与实测水位差异较大,且总体具有较高的不确定性。光学水位驱动的类SWOT水位可以精确捕捉青海湖水位的实际季节变化,而雷达水位驱动结果难以模拟其季节性特征,且较实测数据存在整体的正向偏移。实测和雷达水位驱动的类SWOT水位在季节尺度上获得的较差结果分别是由于青海湖枯水季封冻导致的实测数据采样量较小和2010 年—2013 年LEGOS 的数据缺失导致的,说明SWOT模拟器模拟的水位年内变化对于驱动数据的采样密度较为敏感(表2)。
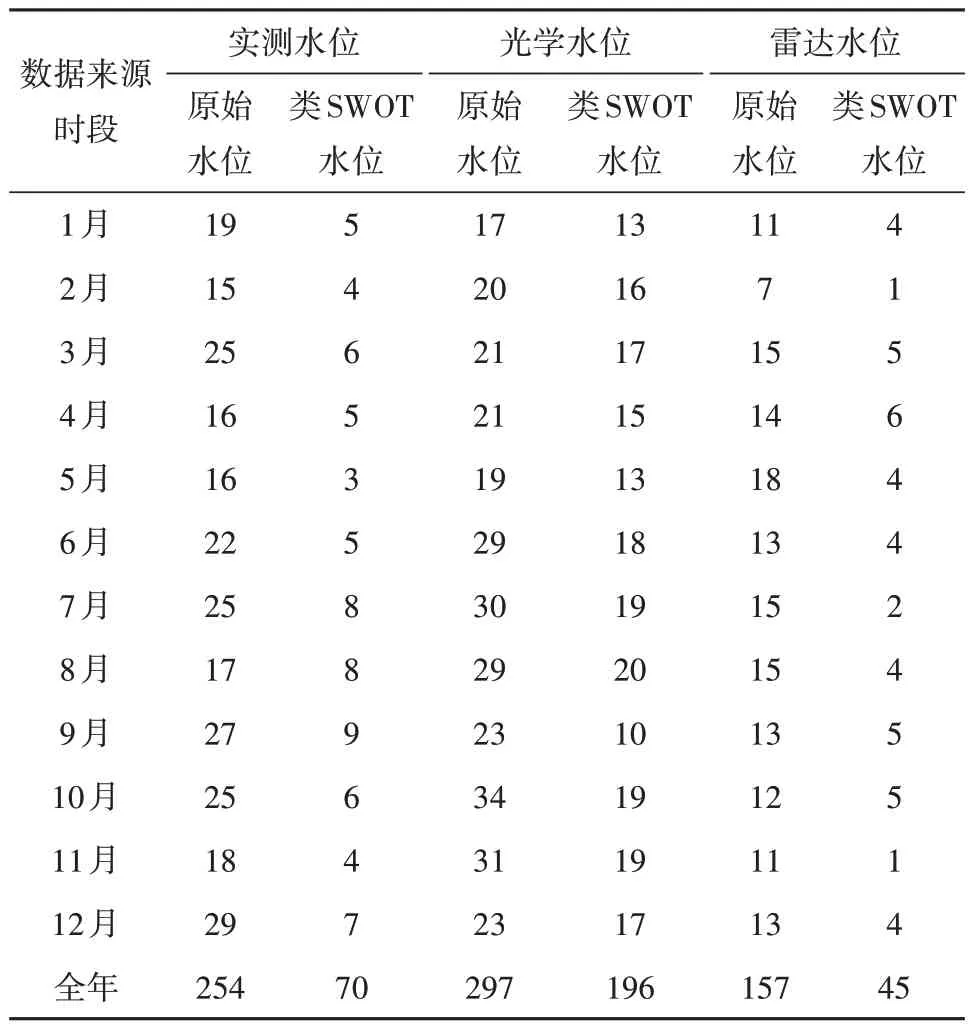
表2 不同驱动数据及对应类SWOT水位有效数据个数Table 2 Valid samples of various input data and associated SWOT-like water level for the Qinghai Lake(2010—2018)
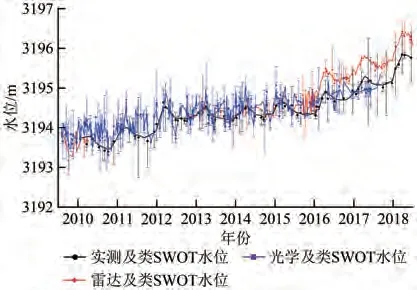
图3 不同驱动数据情景下的2010年—2018年青海湖类SWOT水位时间序列Fig.3 Time series of SWOT-like water level for the Qinghai Lake under different input scenarios(2010—2018)
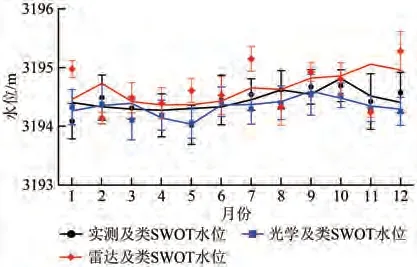
图4 不同驱动数据情景下青海湖类SWOT水位的年内变化Fig.4 Annual cycle of SWOT-like water level for the Qinghai Lake under different input scenarios
表3 用3 种指标(r、NSE 和RMSE)量化了不同季节类SWOT水位的精度。雷达测高水位与实测数据相关性较强,但误差较大,且NSE和RMSE均表明其精度低于光学水位。同时,3 种指标均指明实测和雷达测高数据驱动的类SWOT水位模拟精度在季节及全年尺度上优于光学水位驱动的结果,其具有相对更高的r/NSE 和更低的RMSE 值。季节尺度上,雷达水位和实测水位驱动的类SWOT水位在冬季的模拟效果略差于其他季节,而光学水位则在秋季具有相对较差的结果。全年尺度上,SWOT模拟器模拟水位与输入数据之间的NSE分别为0.98(实测水位)、0.89(光学水位)和0.99(雷达水位),精度高于现有激光测高卫星(Zhang 等,2011;Zhu等,2014)、雷达测高卫星(张洪源 等,2018)或光学卫星衍生水位(Li等,2019)。此外,通过与实测值对比,分别基于光学或雷达测高水位模拟得到的类SWOT水位总体上并未降低其原始观测精度,体现了SWOT卫星巨大的应用潜力。
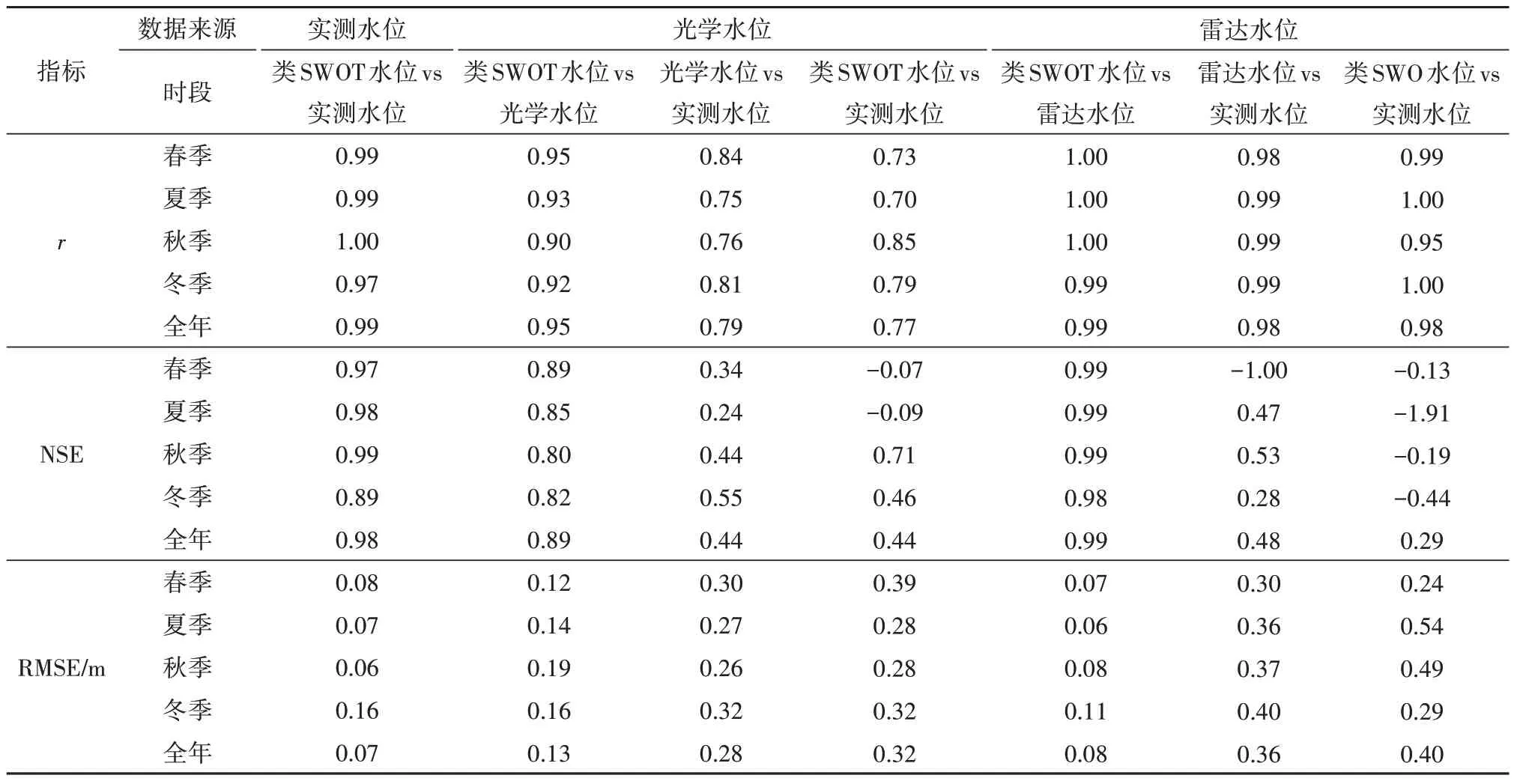
表3 不同驱动数据情景下的类SWOT水位的精度评估Table 3 Accuracy evaluation of SWOT-like water level for the Qinghai Lake(2010—2018)
相对传统雷达高度计的沿轨工作方式,SWOT卫星可以提供二维的宽刈幅干涉测高信息,且SWOT 卫星较短的重访周期(21 d),能够监测内陆湖泊的季节性水位动态,弥补现有激光测高卫星时间分辨率较低的劣势。此外,SWOT卫星具有更大的覆盖率,可以对面积在250 m×250 m以上的内陆水体实现有效监测,设计相对误差低于25%,对于1 km×1 km以上的地表水体设计相对误差则低于15%(Biancamaria 等,2016)。总之,SWOT 卫星数据对监测全球水资源可用性具有重要意义,未来将成为水文和遥感领域重要的遥感数据源。
3.2 水位趋势分析
考虑到青海湖水位2004 年以来持续上涨(程俭 等,2021),观测其长期变化趋势对周边地区社会发展和居民生活十分重要。计算了2010 年—2018 年期间青海湖不同季节多种数据驱动的类SWOT 水位的长期变化趋势(表4)。除秋季以外,光学水位及其驱动的SWOT模拟结果,在各时间尺度均体现了与实测值同样的上升速率;但雷达水位及其衍生的类SWOT数据上升速率明显快于实测值,这是2016 年开始雷达测高水位异常上升引起的(图3)。此外,实测水位和光学水位驱动的类SWOT水位估算的长期趋势较雷达水位结果更接近原始水位,其在冬季体现了较大误差,分别为0.21±0.032 m/a和0.33±0.045 m/a,均高于原始实测水位(0.19±0.019 m/a)和雷达水位(0.27±0.039 m/a)。光学水位驱动结果则在春季(0.17±0.033 m/a)和夏季(0.13±0.015 m/a)相对原始水位更低,其分别为0.19±0.020 m/a和0.15±0.014 m/a。在全年尺度上,不同类型的数据驱动的SWOT模拟器模拟结果均能捕捉青海湖水位的长期上升趋势,与各自的输入数据保持高度一致。
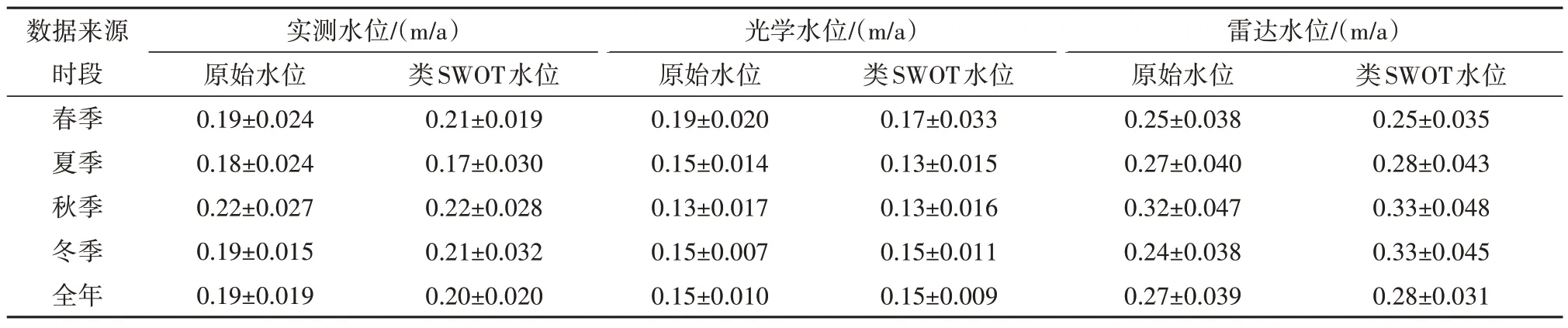
表4 不同驱动数据情景下青海湖2010年—2018年类SWOT水位长期趋势Table 4 Long-term trends of SWOT-like water level for the Qinghai Lake during 2010—2018 under different input scenarios
3.3 储水量变化
明确青海湖水量变化对于区域水资源管理十分重要。基于青海湖“水位—水面面积”关系,使用类SWOT水位数据估算2010年—2018年青海湖水量变化,并结合GRACE重力卫星和WGHM 水文模型数据对比验证(图5),其在2010 年—2012 年相对类SWOT水量估算值呈现了整体偏移,其可能由青海湖区域的GRACE卫星数据信号泄露或WGHM模型较粗糙的空间分辨率(0.5°)引起。实测水位和光学水位驱动的类SWOT储水量变化较雷达水位结果与GRACE/WGHM 数据相关性更高,该差异是由于雷达测高水位本身的不确定性相对较大导致的。然而,2010 年—2013 年期间光学水位驱动的类SWOT储水量较实测水位和雷达水位结果更加分散,这可能是因为2013 年底退役的Landsat-5 卫星影像质量较差,从而造成相应的光学水位不确定性较大导致的(图3)(Li等,2019)。
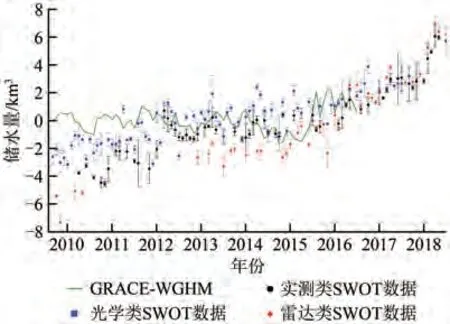
图5 不同驱动数据情景下青海湖类SWOT水位衍生储水量变化时间序列Fig.5 Time series of SWOT-like water level-based water storage changes for the Qinghai Lake under different input scenarios
为了量化地表水体储水量变化,传统手段往往需要结合测高卫星和光学影像数据基于水体的“蓄水量—水位—水面面积”关系进行估算,或从GRACE 重力卫星反演的陆地水储量中扣除水文模型模拟的土壤水和地下水组分(Xu等,2020)。然而,SWOT卫星可以利用雷达干涉技术,实现对水体表面积和水面高程的同时监测,并结合高分辨率的数字高程模型(DEM)数据估算蓄水量变化。基于SWOT卫星监测地表水体蓄水量,不但克服了联合使用测高及光学成像数据引入的不确定性和系统偏差,还比使用GRACE 及水文模型的方法具有更高的空间分辨率,未来在水库调度、洪涝预警方面具有较大应用价值。
4 结论
青藏高原是对全球气候变化效应最剧烈的地区之一,其拥有世界上数量最多、海拔最高的高原湖泊。然而,由于地理位置偏远且地形条件复杂,在实测水位资料稀缺的背景下,通过传统测高卫星获得青海湖水位数据受到空间分辨率低、重访周期长、和反演精度差等客观条件限制。
作为新一代宽刈幅干涉测高卫星,SWOT(Surface Water and Ocean Topography)卫星具有高精度和高时空分辨率的优势,其发射后可显著改善青藏高原湖泊群水位监测情况。本文以青藏高原第一大湖:青海湖为例,使用CNES SWOT 水文工具箱,分别获得其在实测水位、光学水位和雷达水位驱动情景下2010 年—2018 年类SWOT 水位序列,并通过时间和空间尺度上的对比分析,验证了SWOT卫星对于青海湖的水位监测潜力。
研究结果表明,多种数据驱动的类SWOT水位均可在季节尺度和年尺度上捕捉真实水位变化,r和NSE 分别大于0.90 和0.80,RMSE 小于0.19 m;同时,其对2010 年—2018 年青海湖水位的长期变化趋势有较好的监测效果。空间尺度上,类SWOT水位误差随干涉入射角增大而逐渐下降,由于暗水效应和地理定位偏差的影响,其在湖泊岸线和碎片交接处的误差也相对较大。类SWOT水位衍生的湖泊储水量变化与GRACE及WGHM 水文模型结果基本一致,体现了SWOT卫星发射后对青海湖水资源变化的潜力。
本研究仅使用了固定的青海湖水体掩膜数据驱动SWOT 模拟器,未来可结合Landsat 系列、Sentinel 系列和高分系列卫星,获取高精度的时变湖泊掩膜,更真实地模拟其湖泊岸线变化过程,并进一步估算水面面积和湖泊储水量动态变化,从而为青藏高原气候变化及区域水资源规划及管理提供科学依据。
志 谢本文SWOT 模拟器的安装和使用得到了法国空间研究中心(CNES)的帮助;湖泊掩膜数据、实测水位数据来自国家青藏高原科学数据中心;GRACE 卫星数据来自NASA JPL 机构。本论文的数值计算得到了武汉大学超级计算中心的计算支持和帮助。在此表示衷心的感谢!
