基于ROS和Pixhawk飞控自驾仪的无人清扫船研究
2023-09-08方淑娟李子琦
方淑娟 李子琦
(呼伦贝尔学院,呼伦贝尔 021008)
随着人们越来越关注对海洋环境的保护,无人船作为一种新兴技术应运而生。在海洋保护区巡航方面,无人船能够提供全新的解决方案。但是,当前的无人船技术仍然面临许多挑战,如航行控制、集中式监测和环境适应性等。为了解决这些问题,通过机器人操作系统(Robot Operating System,ROS)与Pixhawk飞控自驾仪相结合,实现无人清扫船的自主导航、路径规划的高度自主化等。推动无人船技术的创新和应用,为解决环境清洁问题做出贡献。
1 整体方案设计
无人清扫船采用双船体设计,以ROS机器人控制系统作为平台,使用Pixhawk飞控自驾仪及其配套的固件PX4作为无人船的控制器硬件和软件系统。无人船内部硬件与控制程序组成了6大系统,分别为动力系统、清扫作业系统、供电系统、通信系统、图像与数据传输系统以及传感器系统。无人船通过通信系统与地面站传输数据与视频图像,实现自主巡航清扫作业、轨迹规划和视觉追踪等功能[1]。
2 船体设计
无人清扫船船体形状为凹字形,在结构设计上采用双船体设计,船身中间镂空,两船舱末端连通。连接处底部预留出水口,左右两侧船舱各有一个直流电机推进器,通过改变电机的转速来实现前进、转向等操作。船顶安装太阳能充电板可为锂电池供电,船首作为清扫工作区安装有舵机与清扫耙爪,将垃圾扫入船体中间的收集网[2-3]。船体结构示意图,如图1所示。
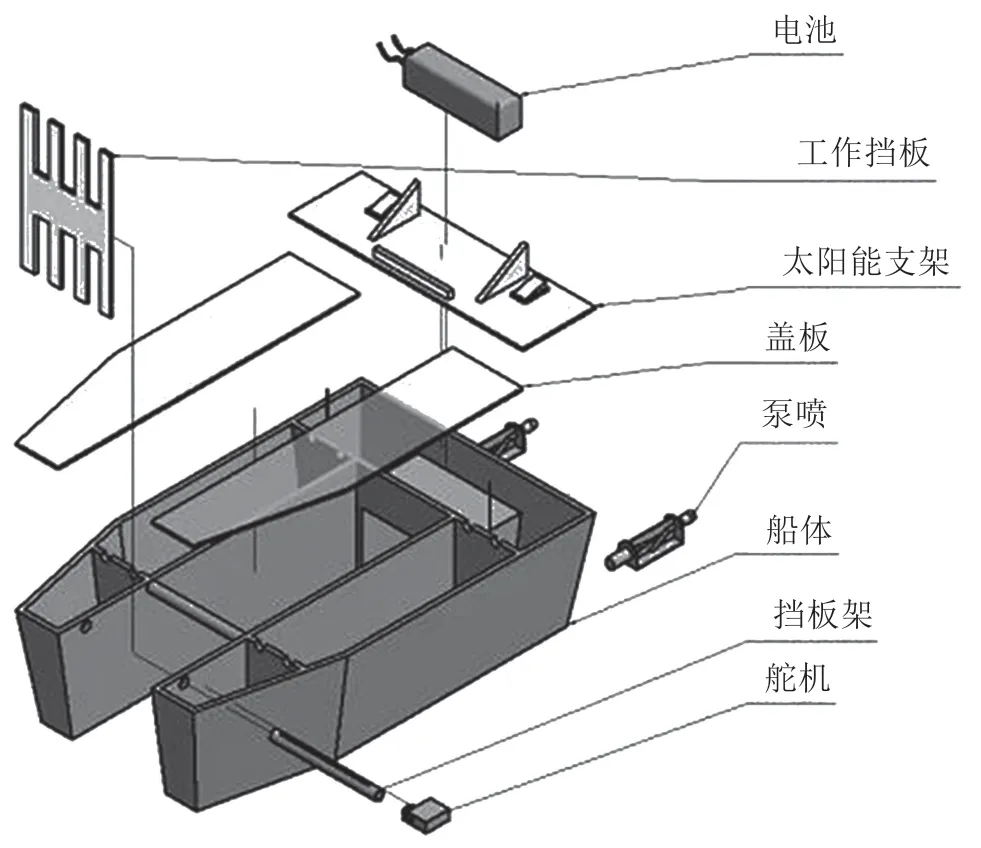
图1 船体结构示意图
3 硬件组成
(1)动力系统。将电机与舵机通过电调连接,再将电调连接至Pixhawk飞控自驾仪,以锂电池作为动力部分的供电来源。
(2)清扫作业系统。在舵机上安装清扫耙爪,通过舵机驱动耙爪进行旋转清扫作业。舵机与Pixhawk飞控自驾仪相连接,以锂电池作为动力来源供电。
(3)供电系统。太阳能充电板通过分电板接入,使得锂电池不仅可以通过充电器进行充电,还能由太阳能充电板提供稳定的电力,确保无人船的稳定工作。
(4)通信系统。通信系统由接收机和遥控器组成,当无人船控制系统或地面站规划的巡航工作路径出现故障时,该系统可以切换到人工控制模式,确保无人船设备的安全性。
(5)图像与数据传输系统。该系统由数据传输模块、图像传输模块的发射端和接收端以及摄像模块构成。通过Wi-Fi进行数据传输,使无人船能够与地面站实现数据的双向交流。
(6)传感器系统。该系统由温度传感器、压力传感器、定位模块、扩展板和惯性导航等部件组成,可以为船只提供必要的环境感知和任务执行能力。
无人船主控器为Pixhawk 2.4.8飞控自驾仪,由高性能处理器和丰富的传感器集成。其开源性质使得开发者可以自由修改和定制,以满足各种应用场景的需求。它与ROS等开源软件平台的集成可以进一步扩展功能,并实现更高级的控制、感知和任务执行等功能。它有多种接口和连接选项,包括串行通信接口(如USB接口和Telem接口)、无线通信模块接口和外部传感器接口,以便与其他设备和系统进行通信与集成[4-5]。此外,Pixhawk 2.4.8还支持使用全球定位系统(Global Positioning System,GPS)和惯性测量单元(Inertial Measurement Unit,IMU)等传感器进行位置和姿态估计。
4 控制系统
无人清扫船以ROS机器人控制系统作为平台,配合Pixhawk飞控自驾仪和其固件PX4来实现控制。通过连接传感器(如GPS、IMU、避障传感器等)与Pixhawk飞控自驾仪,利用ROS的通信功能,实现无线通信模块与地面站的连接。通过ROS的消息传递机制,可以传输无人船的状态信息和控制指令。同时,借助ROS导航堆栈中的功能,无人船可以实现自主导航和路径规划[6-7]。通过配置和启动导航堆栈中的路径规划器和路径跟踪器等组件编写控制器节点,将导航算法得到的轨迹转换为电机和舵机的控制指令。利用MAVROS与Pixhawk飞控进行通信,并发送控制指令,实现无人船的自主导航、感知和任务执行等功能。
5 优缺点分析与前景展望
5.1 优缺点分析
无人船作为一种自动化船只,具有一些明显的优点和潜在的缺点。
5.1.1 优点
(1)自动化操作。无人船使用自动驾驶系统,可以在没有人为操控的情况下执行各种任务,减少了人力成本,提高了效率。
(2)安全性。无人船的自动化系统可以提供更高的安全性,能够通过各种传感器来监测环境,避开障碍物并执行紧急停止[8]。
(3)长时间工作。无人船可以连续工作数小时或数天,无须人员交替值班。
(4)精准性。无人船可以通过航位推算和GPS导航等技术实现更精确的定位和导航,从而提供更高的工作精度。
5.1.2 缺点
(1)技术复杂性。无人船的设计、搭建和维护都需要一定的技术和专业知识。
(2)依赖性。无人船在自动化系统的正常运行下才能发挥作用。
(3)法律和监管要求。无人船的运行可能受到法律和监管机构的限制。
(4)良好的通信和控制。无人船的控制需要可靠的通信和控制系统。
5.2 发展前景和改进方向
5.2.1 无人船的发展前景
无人船的发展前景非常广阔,在许多领域都具有广泛的应用潜力。
(1)海洋探索和科学研究。无人船可以用于海洋地质、生物学和环境研究,帮助人们监测海洋污染、测量气候变化等。未来可以改进无人船的传感器和通信技术,以便收集更多准确的数据。
(2)海上安全和监管。无人船可以在海上监测和巡逻,提供更好的海上安全保障。未来可以改进自主导航和避碰系统,提升无人船的安全性。
(3)渔业和海洋资源管理。无人船可以用于渔业监测、资源评估和保护,以帮助维持海洋生态的平衡。未来可以进一步发展智能渔具和资源管理系统,提升渔业的可持续性。
(4)港口和海上物流。无人船可以用于港口巡逻、货物运输和航道维护,提高物流效率,减少成本。未来可以优化无人船的自动化作业和能源管理,使其更适用于大规模运营[9]。
(5)水下勘探和沉船探寻。无人船在水下勘探和沉船探寻方面具有巨大潜力。未来可以进一步发展水下机器人技术,提高水下作业的准确性和效率。
5.2.2 无人船的改进方向
要改进无人船的技术,需要解决一些关键挑战。
(1)自主导航和避障。无人船需要具备高精度的自主导航和避碰能力,以确保安全和准确性。
(2)通信和遥控。无人船需要稳定可靠的远程通信和遥控系统,以便及时接收指令并传递数据。
(3)能源和续航能力。改进无人船的能源管理系统,增强其续航能力,以适应各种应用场景。
(4)数据处理和智能决策。无人船需要具备高效的数据处理和智能决策能力,以准确获取和分析环境信息,并作出相应的行动。
6 结语
随着技术的不断发展和改进,无人船有望在各个领域中发挥更重要的作用,并为海洋和水域资源管理、科学研究以及物流运输等提供更多的解决方案。展望未来,无人清扫船在环境保护、城市水域管理以及旅游景区维护等领域拥有广泛的应用前景。随着应用场景的不断拓展,无人清扫船在自动化能力、传感器技术和数据处理能力等方面仍有进一步提升的潜力。同时,需要研究和解决一些技术挑战,如续航能力在长时间工作条件下的持久性、自主避障的准确性以及在多变环境下的自动化操作等问题。
