输电线路多旋翼无人机智能检修方法
2023-09-07李辉
李 辉
(新疆送变电有限公司,新疆 乌鲁木齐 830000)
随着我国国内经济和电力能源的联动发展,输电线路相关功能需求越来越多。电力资源的发展和支持为社会的发展奠定了坚实有力的基础。为了满足国内对电力越来越高的需求,国家电网在电力线路和高电压、大容量方向上继续扩大规模和完善。当一些大型复杂的输电线路发生故障时,需要更多的人力、物力进行检修,对故障区域进行选取时会消耗大量时间。输电线路的隐藏缺陷因分布的不同而有所差异。多旋翼无人机使用时速度快、耗时短且准确率高,更适合现代智能电网下的检修的硬核要求。与传统方法相比,常用的电力线路检修方法存在较大误差、人员多和工作量大,效率较低的问题,而多旋翼无人机的人机设备联动检修方法可对较长线路进行大范国快速信息查询,并对区域进行精准识别。为了解决输电线路中人工作业和常规检测不足的问题,该文提出了通过无人机红外影像技术,然以算法计算出故障点范围并进行线路故障特征提取,来完成对输电线路的维修。
1 输电线路多旋翼无人机智能检修方法设计
1.1 无人机红外影像采集图像
对输电线路故障区域进行识别时,线路内部出现破损等情况。输电线路上的设备和一些较小的电缆故障问题通过肉眼难以发现,因此选取多旋翼无人机的可红外成像技术对输电线路的故障区域进行识别。为了提高检测的准确性,必须保证的基本作业条件见表1。
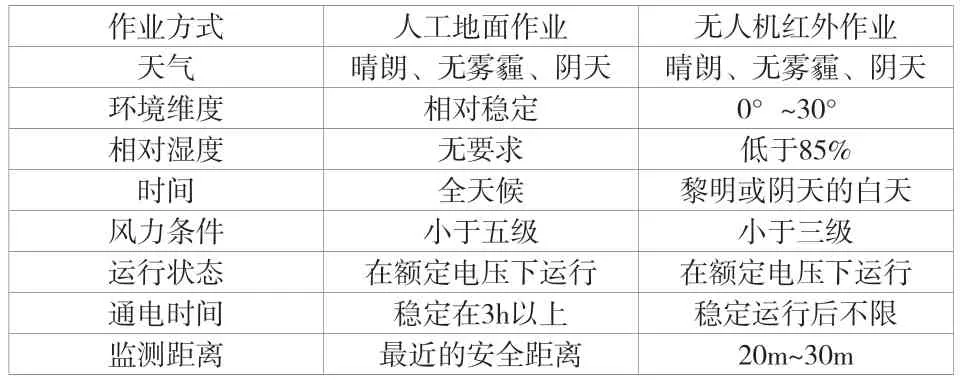
表1 无人机红外设备巡检的条件要求对比
多旋翼无人机智能检修方法可以将拍摄到的红外影像传回地面监控站,既可以利用地面系统来根据红外影像特征进行自动判断,也可以提供给专业人员进行人工判断[1]。主要通过2 种方法进行判定。
第一,密集读取与提取。设Q表示密集度区域,其表达式如公式(1)所示。
式中:4π 为周长;A为面积。
当Q=1 时,该区域面积最小;当Q>0 时,表示输电线路轮廓线光滑;相反Q<0,表示输电线路表面轮廓线凹凸不平。
第二,偏心度区域提取。用E代表偏心度大小,其具体算法如公式(2)所示。
式中:E为偏心度大小;R为半径;πR·R为红外成像区域内最大圆面积。
通过计算可以得出形状变化后(如伸缩等)的偏离率。对偏离率的分析大于标准值,则为该区域发生故障,小于标准值则状态良好,继而可以得到输电线路中发生故障的区域。
1.2 故障线路聚类分析
通过红外影像采集图像对故障区域进行识别、选取后,为了避免传统方法出现的后果,第一步就是要了解输电线路的故障顺序,以便后续计算。该文通过模糊C 均值算法来计算经过红外成像识别的故障目标最小值和其他函数,为故障分析提供数据基础。
聚类过程中数据的隶属度ai如公式(3)所示。
式中:i为可获取的设备数据集合;c为i的子集合个数。
通过聚类分析可以发现多旋翼无人机红外影像采集的紧密相关的观测值组群。计算该区段在各个最终聚类结果簇中的百分比并进行累加,将其作为该区段的簇独立特征性均值大小。
该文上述提到的故障分类目标函数设定如公式(4)所示。
式中:k为距离度量平方值;m为模糊指数;i为样本数据由类别中心之间的差值。
通过公式(5)可以计算出聚类中心与隶属值计算过程中的目标函数Hm(A,B),最小值即为min{Hm(A,B)}。
根据公式(5)可得目标函数的最小值,为后续检修结果提供数据基础。
1.3 提取输电线路故障特征
使用多旋翼无人机搭载机械设备信号采集装置,获取输电线路故障信号集合。由于信号集合中除正常运行信号外,还包括部分故障信号、噪声以及冗余信息,为正确判定故障类型,需要对故障特征信息进行提取与分析。在对比多种故障特征类型信号处理分析技术后,该文选择主成分分析法完成该部分处理[2]。
常规使用的主成分分析法不能对输电线路中的非线性信号进行分析,因此该文利用核函数将特征数据映射到指定空间中,并利用数据空间对特征矩阵进行处理。根据输电线路信号特征,该文使用核函数完成此操作。与此同时,在主元素选择过程中,元素选择过多会造成信号资源浪费,而选择太少又不能体现故障点的特征,造成故障诊断结果的误判与漏判。为此,在保证特征提取结果正确率的前提下,需要对资源进行合理化应用。相应的正确率系数计算如公式(6)所示。
式中:ti为i类故障样本数;Gi为主成分分析后得到的第i类故障样本数。
如果在主成分分析的过程中,所得故障特征正确率无法达到阈值,需要增加主元素,以此达到预设的正确率要求,并将提取到的故障特征应用到后续的设备故障检修中。
1.4 实现输电线路故障维修
多旋翼无人机采集红外影像后,通过密集读取与提取、偏心度区域提取方法对输电线路进行故障的区域识别[3]。接下来对故障区域线路进行聚类分析,得出目标函数的最小值。并通过计算提取输电线路故障特征,得到输电线路故障区域线路损坏特征,以此来进行合理维修。经识别后,输电线路共有如下部分需要进行维修,见表2。
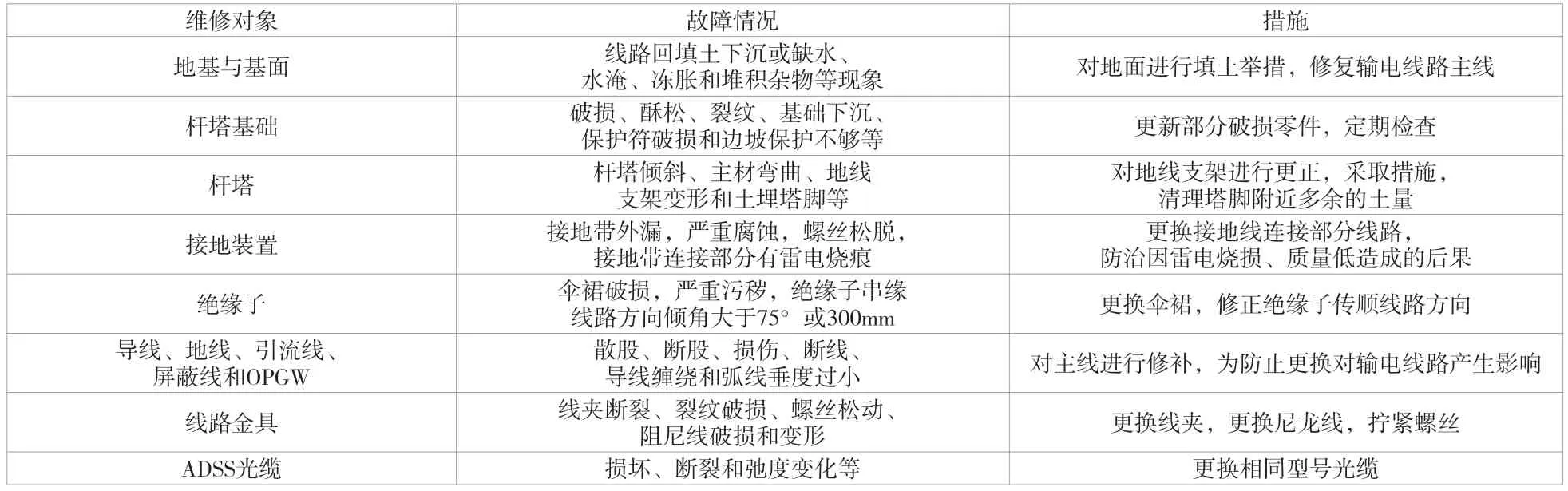
表2 故障维修区域以及措施
通过故障检测并执行如表2 所示的维修措施和方法,可以对输电线路的故障进行完整检测与修理。
2 对比试验
2.1 试验准备
在MATLAB 2018 仿真平台上进行试验,选择无人机模型DJI Mavic,设置该输电线路为单回路,电压等级为750kV,线路导线型号为6×JL/G1A-400/50。地线型号如下:一般段型号为JLB20A—100,进出线段型号为JLB40-120,全线光缆型号为OPGW-120。三跨点3 处,其他重要交叉跨越7 处。杆塔高度为55m,抗风能力40m/s,质量150t,共设置了365 基杆塔,其中直线塔319 基,耐张塔46 基(其中换位塔2 基)。该线路远离城市,总长度为170.756km。其中,输电线路的路径途径不同地形和环境,包括山区、平原、丘陵、戈壁以及河流等。
为验证该方法的应用性能,将该文智能检修方法与文献[1]人工识别检修方法和文献[2]单一机械识别检修方法进行对比。在试验过程中,将试验指标设定为3 种,防止一种数据得出的结论不具备说服性,并对3 组指标进行综合分析。该文将试验对比指标设定为故障类别识别误差率、故障发生次数以及故障检修时间。设置输电线路的故障共5种,具体见表3。
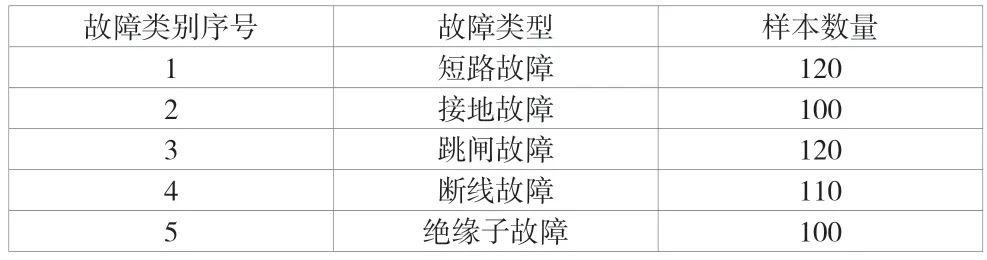
表3 线路故障类型及样本数量
将表3 的输电线路故障作为试验样本,采用不同方法对目标线路进行检测与维修。
2.2 试验结果
采用3 种不同方法进行输电线路检修。先识别故障区域,计算各方法的故障区域识别误差率,试验结果如图1 所示。
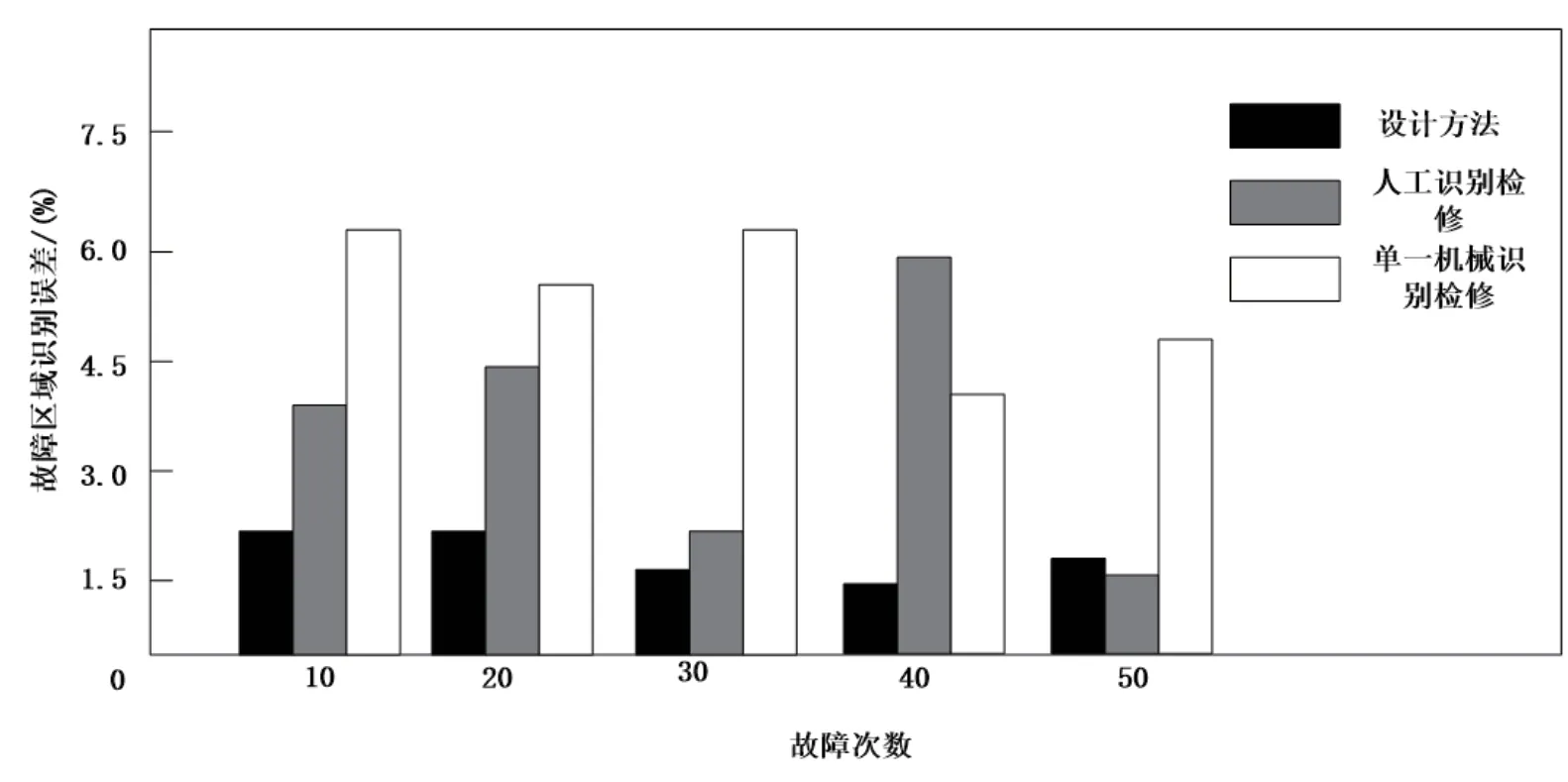
图1 故障区域识别误差率
根据图1 试验结果可以看出,在不同故障次数下,多旋翼无人机智能检修方法故障区域识别的误差率最低,并且最高值仅为2.2%。而人工识别检修方法和单一机械识别检修方法识别故障的误差率最高可达7%,远高于无人机智能检修方法,因此该文设计方法的故障区域识别较精准。
故障发生次数如图2 所示。在该文的试验中,选定3、6、9、12、15 个月为时间样本,分别检测在这些时间段中采用3 种方法检修过的输电线路再次发生故障的次数。根据图2 数据可知,在第一次检修后的3 个月内,经过无人机智能检修方法后没有发生二次故障,而其他2 种方法均发生过一次故障。防止试验具有偶然性,该文分别进行了其他4 次检测,得到的结果是4 次检测中采用人工识别检修方法和单一机械识别检修方法的输电线路发生故障次数均高于无人机智能检测方法。通过对该指标的研究可以发现,在对故障区域进行精准检修中,多旋翼无人机技术智能检修方法的识别误差较低且识别结果较稳定。在进行的5 次数据统计中,该文提到的智能检修技术的使用效果优于人工识别检修方法和单一机械识别检修方法。在后续的研究中,应对人工识别检修方法和单一机械识别检修方法的该部分性能进行优化,以提升人工识别检修方法和单一机械识别检修方法的稳定性。
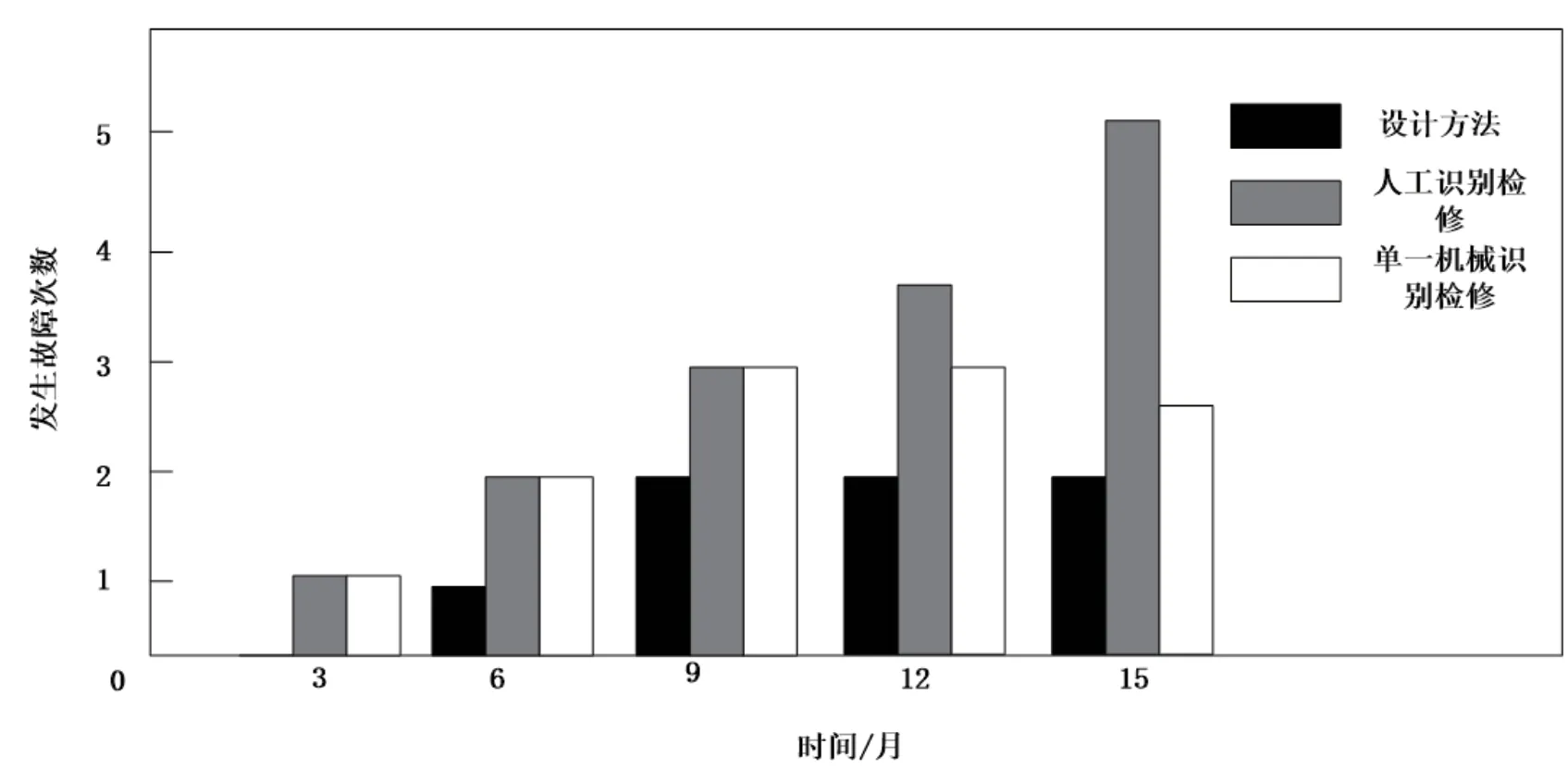
图2 故障发生次数
在同一种故障类别下3 种方法对故障进行检修的时间对比如图3 所示。
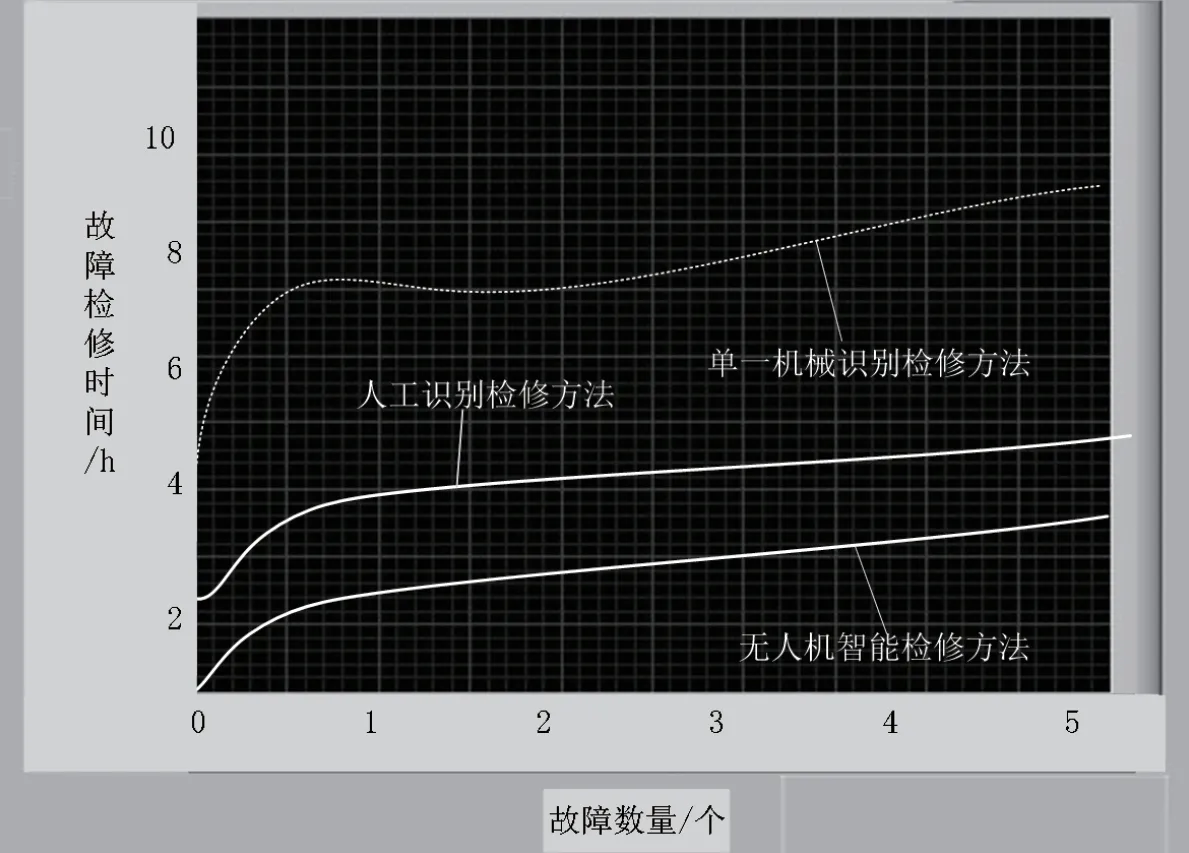
图3 检修完成时间
根据图3 可以看出,在同一故障数量下,该文提到的多旋翼无人机智能检修方法检修时间远低于人工识别检修方法和单一机械识别检修方法。当输电线路故障为一处时,多旋翼无人机智能检修方法检修时间不到1h,而其他2 种检修方法为3h~5h,时间远多于多旋翼无人机智能检修方法。由此看来,智能方法在检修中不仅可以精准识别,还可以提高检修效率,省去大量人力和时间。
通过上述3 次试验(分别为故障区域识别误差率、故障发生次数和检修完成时间)和图表分析可知,多旋翼无人机智能检修方法的使用效果优于人工识别检修方法和单一机械识别检修方法。
3 结语
传统的输电线路人工检修方式存在检修精度低、盲区多和运维范围小等缺点,不能满足线路检修的标准。传统检验方法的这些缺点推动了无人机检验技术的发展。基于人工智能的输电线路无人机检修技术将多种设备进行了结合,例如该文中将多旋翼无人机技术与红外成像相结合,能更高效、准确地识别出输电线路的路障区域所在。
