长测程机载激光雷达系统在线性工程地形图测绘中的应用
2023-09-06董明辉
摘 要:随着测绘新技术的不断发展,传统测量手段已经不适应当前线性工程大比例地形图测绘需求,在此背景下,长测程机载激光雷达系统凭借其自动化程度高、受天气影响小、数据生产周期短、精度高等特点,在线性工程地形图测绘中起到越来越重要的作用。文章以广西线性工程项目为例,研究长测程机载激光雷达系统在1:1 000地形图测绘中的应用,以供同类项目提供借鉴和参考。
关键词:长测程;激光雷达系统;线性工程;1:1 000测图
中图分类号:TP39 文献标识码:A 文章编号:2096-4706(2023)14-0094-05
Application of Long Range Airborne Lidar System in Linear Engineering Topographic Mapping
DONG Minghui
(Guangxi Zhuang Autonomous Region Institute of Land Surveying and Mapping, Nanning 530023, China)
Abstract: With the continuous development of new surveying and mapping technologies, the traditional surveying methods have not adapted to the current needs of large-scale topographic mapping of linear engineering. In this context, the long range airborne lidar system plays an increasingly important role in the mapping of linear engineering topographic maps by characteristic of its high degree of automation, small weather impact, short data production cycle and high accuracy. Taking the Guangxi Linear Engineering Project as an example, this paper studies the application of long range airborne lidar system in 1:1 000 surveying and mapping of topographic map to provide reference for similar projects.
Keywords: long range; lidar system; linear engineering; 1:1 000 mapping
0 引 言
機载激光雷达系统是一种主动式对地观测系统,它集成激光测距技术、摄影测量技术、计算机技术、惯性测量单元(IMU)、差分全球定位系统技术于一体,已经成为地形图测绘的主要手段之一。近年来随着机载激光雷达系统不断发展,其有效测程可达到千米级,已广泛应用于公路测量、电力测量、三维数字城市建设、海洋测绘、森林植被勘测、自然环境与灾害监测等领域。本文以广西线性工程项目为例,研究长测程机载激光雷达系统在1:1 000比例尺地形图测绘中的应用,其作业方法具有极大的推广应用价值。
1 测区概况
本测区为G75兰海高速(钦州至北海段),起点为钦州市钦南区,终点为北海市合浦县(如图1所示),项目全长110 km,地形主要为丘陵山地,最低海拔为2 m,最高海拔为81 m。项目应用了中海达ARS-1000L长测程机载激光雷达系统,进行1:1 000比例尺数字高程模型(DEM)、数字正射影像图(DOM)、数字线划图(DLG)生产,飞行平台为曜宇Yunux-Long 120 Pro电动六旋翼无人机,最大续航可达120 min,最高升限4 000 m,巡航速度50 km/h,激光雷达系统最大测程为1 350 m,最大扫描频率820 kHz,可支持无限次回波,系统精度可达5 cm,集成4 240万像素高清数码相机。
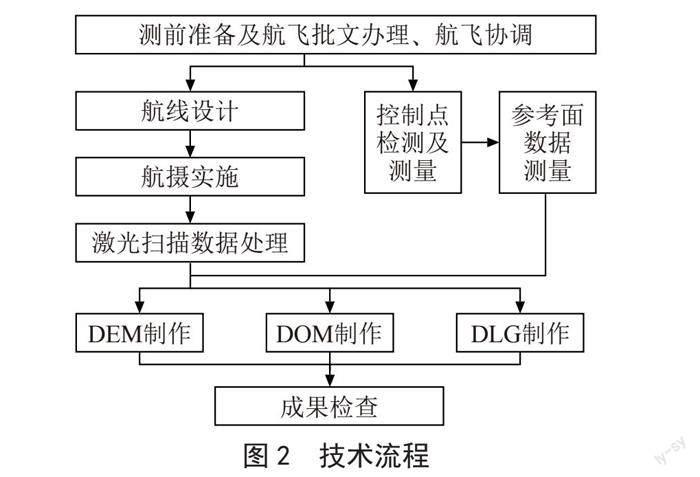
2 技术流程
项目各项工作均按照技术规范规定的流程进行作业,主要包括测前准备、航线设计、航拍实施,同时进行控制点检测及测量、参考面数据测量,最终制作出数字高程模型(DEM)、数字正射影像(DOM)、数字线划地图(DLG)成果并进行质量检查(如图2所示)。
2.1 航线设计
因项目区为线性工程,无人机航线平行于道路主干道进行设计,根据地形起伏、飞行安全条件、道路弯曲程度,将项目区划分为多个航摄分区,分区间在保障重叠度的同时,完整覆盖整个摄区。项目测量范围为道路征地红线外扩20 m,每个航摄分区布设2条航线即可,根据项目精度要求及规范要求,无人机参数设计为:巡航速度10 m/s,相对航高300 m,激光脉冲频率100 kHz,激光点密度50点/平方米,航向影像重叠度设置为65%,旁向影像重叠度设置为30%。
2.2 基站架设
激光雷达系统采用了DGPS差分定位技术,需在项目区沿线布设一定数量的地面基站,通过计算基准站至卫星的距离改正数,可以提高激光雷达系统的定位精度。本项目各地面基站间的距离约为15 km左右,能够满足航飞时的要求,架设流程为先将脚架架设在已知点上方固定脚架并对中,随后观察基座上的水准气泡判断基座的平整程度,通过调整三脚架高度、旋转微调螺旋使水准气泡居中整平,再用卷尺测量已知点到仪器测量线的斜距并做记录,最后设置好基站采集参数、连接上电子手簿即可开始数据采集。
2.3 参考面数据测量
在项目区均匀每隔10~15 km均匀布设一定数量的参考面,可以消除系统误差,改正激光点云的平面及高程精度,每个参考面的平面主要采集高速路的道路边线、涵洞口、路口拐角等明显分界线处,高程主要采集主干道路面、路边停车场等坚硬、宽阔无地形起伏的区域,参考面的点间距保持在2 m左右,总点数不少于30个。另外每隔一定间距建立一个检查参考面,每个参考面采集10个点间距超2 m的检查点,参考面平面测量相对于邻近基本平面控制点的点位中误差控制在±0.1 cm以内。
2.4 航摄实施
飞行前首先选择视野开阔,空旷平整,上方无遮挡物的起飞场地,保障起飞场地内无行人通过、无信号干扰。在狭窄的区域,主观上无法判定安全距离时,应提前使用小旋翼机巡查起降航线,确认安全飞行空间,如单测区过大或多测区连续作业,还须考虑飞机最大航程的限制,选择最优的起降位置,保证飞行的安全与效率。到达起飞场地由地勤人员组装飞机,组装顺序为先将各连接部件安装上,然后是作业设备,最后是动力和电源装置,安装过程中必须轻拿轻放,完毕后检查各连接部件是否牢固,电源及动力是否充足,根据作业内容与实地天气条件设置作业设备参数,随后进行起飞前检查调试,重点测试螺旋桨、电机等有潜在危险的环节,检查正常即可开展航摄作业。
无人机在起降和巡航阶段,地面站人员应时刻注意地面站飞机飞行的各项指标与参数。如飞行高度、平飞与转弯的姿态、电压稳定性、通信状况、偏航情况等;同时地勤人员需注意观察现场天气变化,不得擅离岗位,以备突发状况及时处理。航摄作业完毕,立即检查航片质量,若出现绝对漏洞、相对漏洞及其他缺陷,采用相同激光扫描参数进行补摄。
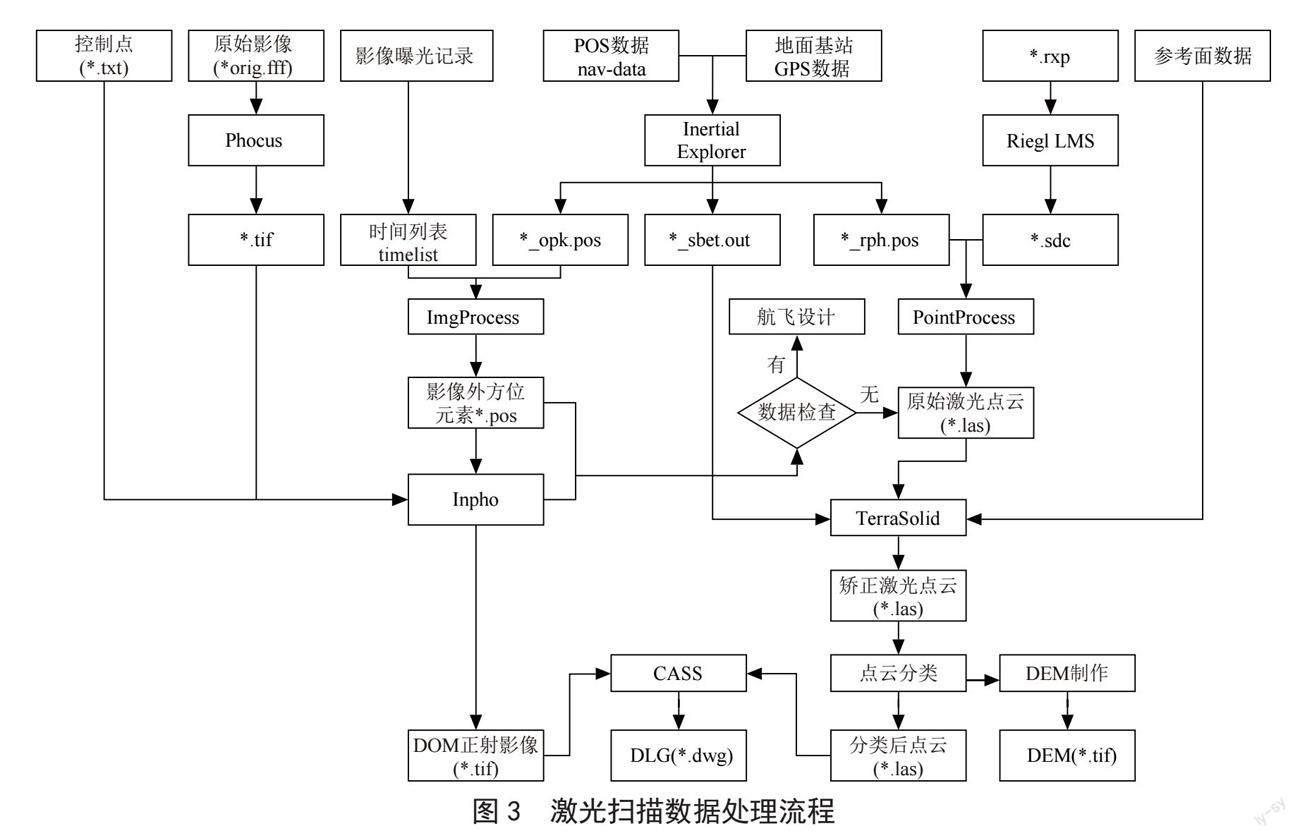
2.5 激光扫描数据处理
准备好格式转换后的激光数据、影像数据、导航文件、飞行日志、平面参考面数据、高程参考面数据、飞行测区范围数据后,即可开展激光扫描数据的处理(如图3所示)。本项目采用NovAtel公司研制的Inertial Explorer软件进行GPS/INS组合导航解算,导航文件位置精度达到0.05 m,姿态角中俯仰/翻滚角精度达到0.002 5°,航偏角精度达到0.005°。
数据解算主要包括数据模式转换、添加数据、数据处理和数据导出。数据模式转换阶段过程中将基站数据转换为静态模式、移动站数据转换为动态模式,随后完成Inertial Explorer工程創建,添加转换后数据进行紧耦合解算,完成惯导类型选择、IMU设置、惯导陀螺仪参数设置、杆壁值设置即可进行正向、反向数据处理、融合解算即可获取特定格式的轨迹文件和点云数据(如图4所示)。
在获取点云数据后,为保障点云精度,需利用TerraSolid软件进行机载航带校正,先将点云按航带分类,只分地面点即可,随后进行初始航带误差检查,软件生成的误差报告只能做参考,实际误差仍需对点云拉剖面检查,利用tieline工具计算点云改正数,最后进行整体误差改正与单航带误差改正可获取更高精度的点云成果。
利用激光点云进行后续生产的关键技术是点云分类,通过编写自动分类宏命令可完成点云自动分类,当点云重叠度很大,且点云密度很大时,需进行去重叠,裁掉边缘的点云,分类顺序为先分地面点再分植被点、建筑点,分类过程中根据测区实际情况设置合理的最大建筑尺寸、迭代角度、迭代距离等参数进一步提高分类精度,若自动分类效果仍不理想可通过Terrascan工具进行手动分类,若因水面镜面反光出现点云空洞,还需进行点云补充。
2.6 数字高程模型(DEM)制作
在对采集的激光点云数据经过数据预处理、激光点云分类处理、激光点坐标系统转换等一系列处理操作后,即可开展数字高程模型制作,利用激光点云分类获取的地面激光点数据,根据约束条件使用Delaunay三角剖分算法可构建不规则三角网(TIN),对不规则三角网进行高程重采样便可制作出数字高程模型(DEM),如图5所示。根据实际情况需要和激光点云密度不足体现地表地区生成时,需加入特征线数据来配合生成DEM,如图6所示。
2.7 数字正射影像(DOM)制作
在经过导航文件制作、DEM制作之后,可以获取航摄影像的外方位元素以及测区地形数据,结合航摄影像进行图像连接点提取、光束法平差、影像单张正射纠正、正射影像拼接,便可制作出DOM(如图7所示)。
在图像连接点提取过程中,本项目采用了基于DEM辅助的图像连接点提取算法。利用原始激光点云数据,经过点云分类处理,过滤植被、建筑点,从而获取地面点,在此基础上,生成较高精度的数字地面模型,作为测区初始地形,缩小连接点匹配的搜索范围,降低茂密植被重复纹理区的误匹配概率,提高连接点在每层金字塔影像匹配的质量和精度,通过逐层控制与光束法平差,提高连接点在初始金字塔影像层的匹配精度,为最小二乘匹配法提供了良好的匹配初值。
利用在测区均匀分布的地面实测检查点来检查光束法平差精度,在图像上人工刺出检查点,利用光束法平差求解得到的外方位元素求解出检查点的三维坐标,通过比较检查点的实测坐标与求解坐标,便可以得到光束法平差精度。在图像外方位元素精度较高、连接点分布均匀密集的条件下,光束法平差精度能达到0.07 m以内。
平差后需对影像进行单张纠正,实现两个二维图像之间的几何变换,本项目采用数字微分纠正法进行单张纠正,该方法优点在于可以很好的消除由于像片倾斜、地形起伏引起的像点位移同时将影像归化为成图比例尺,其基本过程为确定原始影像与纠正后影像之间的几何关系、求解对应像素的位置、进行灰度内插与赋值运算,设任意像元在原始图像和纠正后图像中的坐标分别为(x,y)和(X,Y)。它们之间存在着映射关系:
x = fx (X, Y );y = fy (X, Y )
X = φx (x, y);Y = φy(x, y)
在开展正射影像拼接前,先在单张纠正的影像中,挑选一张色调合适、明暗均匀的图像作为模板图像,将非正常影像以此图像为基准就行修整,使所有图像色调明暗尽量一致。对于图像拼接线两边色调明暗不一致的,通过图像编辑、羽化来改善拼接图像的视觉效果,以此来避免航空影像在拍摄过程中,由于光照、阴影的变化,导致图像的色调、明暗不同。对于拉花的情况,可以通过编辑拼接线,选择图像,利用没有拉花的图像用于拼接。对于无法通过编辑拼接线来进行修整的拉花区域,采用Photoshop软件来进行编辑,最终可得到测区24位RGB彩色模式的全局正射影像(如图8所示)。
2.8 1:1 000数字线划地图(DLG)制作
项目采用“激光点云辅助正射影像进行矢量化法”进行1:1 000比例尺全要素数字地形图测绘,即利用正射影像图采集地形要素,利用激光点云数据采集地貌要素。
利用正射影像图采集交通及附属设施、居民地及垣栅、管线及附属设施、水系及附属设施、植被等要素。准确绘制陆地上的道路及与道路相邻的附属设施,标注准确道路材质及其名称,若多条道路相交时,需处理好相交关系,道路交叉口、公路路中、涵洞、隧道都需测注高程;在居民地及垣栅绘制过程中应能准确测绘房屋的外围轮廓,反映出建筑的结构特征,当多间房屋或构筑物并连时需根据房屋结构及楼层数分开表示,按图式规范表示房屋结构,围墙用不依比例围墙符号表示;管线及附属设施主要包括通信线、电力线、铁塔、电杆等要素,所有管线均需连线表示,管线密集部分可适当进行取舍;水系及附属设施主要包括河流、湖泊、坑塘、水库、水渠等要素,所有面状要素绘制到水涯线,水渠宽度小于1 m时用单线绘制,同时要测标渠底高程、流向;植被主要包括耕地、园地及林地等要素,当同一地块混种多种植被时,按经济价值及种植数量进行取舍,每一地块均应标绘植被符号。
利用点云数据生成等高线,绘制人工修筑或天然形成的陡坎、斜坡等地貌要素,绘制过程中需注意斜坡底需加绘地类界,人工整理过的边坡用斜坡表示,挖掘地用坎或斜坡并配合地类界绘制其范围表示,同时标注“掘”或根据实地注植被符号,施工地、平整地等均不绘制等高线,充分使用软件的捕捉功能,各类地物相交的需捕捉到节点或线上,与坎或斜坡为分界的地物线应捕捉到坎线或斜坡线,不能只到坎牙,坎头的坎上坎下需标注高程,坎长达30 m左右适当标注坎上坎下高程,高程点在30 m左右保留一个即可,地形特征点、边坡位置应有高程点。
对于点云及影像图上无法识别或分不清楚的各类井盖、路标等独立地物、建筑物属性(层数)、材质、各类地理名称和工矿企业名称、植被名称等开展外业实地调绘或实测。利用外业调绘或实测数据对地形图成果进行更新,即可制作最终的DLG数据。
3 精度分析
依据《1:500、1:1 000、1:2 000地形图航空摄影测量内业规范》的要求,1:1 000比例尺地形图平面中误差在平地、丘陵地区应小于等于0.5 m,高程中误差在平地、丘陵地区应小于0.2 m。本项目平面检测采用千寻CORS测量和全站仪测量相结合的方式进行,利用千寻CORS直接测量道路及桥梁的边线、拐角等明显特征点作为检查点,另外用千尋CORS测量部分图根点,然后结合全站仪测量房角点作为房屋平面检查点;高程精度检查采用RTK测量方法进行,采集道路面、坎上、坎下等地作为高程检查点。通过对全线87个平面点、76个高程点进行检测,平面中误差为0.09 m、高程中误差为0.12 m。从检测结果来看,利用长测程机载激光雷达系统在线性工程中的应用,其数学精度能满足相关规范要求。
4 结 论
公路、铁路、石油与燃气管道、城市综合管网等线性工程建设是国民经济发展的基础和命脉,但其勘察设计、项目建设、确权等级周期往往受限于航测摄影条件所限,时间成本较高。长测程机载激光雷达系统采用主动激光测量,较常规摄影测量受到的天气影响小、数据生产周期短、精度高等特点,通过机载激光雷达传感器发射的激光脉冲能部分穿透树林遮挡,直接获取高精度三维地表地形数据,结合集成的高分辨率相机可以同时获取地面高清影像,通过点云数据与影像数据的融合处理,即可获取高精度的数字正射影像图。根据数字正射影像和激光点云成果可获得线性工程的大比例尺地形图、影像图及各类专题数据成果,从而极大简化了摄影测量处理的工作流程,使处理结果更加精确可靠。随着长测程机载激光雷达系统技术的不断发展,其在线性工程大比例尺地形图测绘的应用必将越来越广泛。
参考文献:
[1] 张小红.机载激光雷达测量技术理论与方法 [M].武汉:武汉大学出版社,2007.
[2] 黄克城,宋时文,阎凤霞.机载LiDAR技术在地形图测绘中的应用 [J].地理空间信息,2016,14(4):99-101+12.
[3] 熊登亮,柯尊杰,陈舫益,等.机载LiDAR技术在测制城市1:1000地形图中的应用 [J].勘察科学技术,2015(1):44-46+58.
[4] 黄华平,李永树.机载激光雷达测量技术在铁路勘测中的应用 [J].测绘,2010,33(5):216-217+228.
[5] 王应新.基于机载激光雷达的电力线路工程测量研究 [J].勘测测绘,2016,10:252-254.
作者简介:董明辉(1989—),男,汉族,湖北武汉人,工程师,本科,主要研究方向:无人机低空摄影测量、实景三维模型建设、激光雷达系统测绘、自然资源调查。
