海洋平台GNSS RTK监测数据的CVCEEMDAN-WT-SSA去噪算法
2023-09-05熊春宝张子健于丽娜
熊春宝,张子健,陈 雯,于丽娜
(天津大学建筑工程学院,天津 300072)
海洋平台长期处于恶劣的海洋环境中,并受到风、海流潮汐、波浪等多种荷载交互作用[1-2],结构本身也时刻经受环境腐蚀作用,一旦发生事故,将会给自然环境、社会经济及人身安全带来巨大的危害。因此,为了评估与维护平台的正常运行,有必要对海洋平台结构进行动态变形监测。全球卫星导航系统(global navigation satellite system,GNSS)[3]因其采样率高、自动化程度高、四维监测、全天候监测等优点,已被广泛应用于结构健康监测领域,如高层建筑、大跨桥梁、大坝等。在GNSS动态监测中绝大部分误差都可以通过一定的技术手段予以消除,只有多路径误差与随机噪声难以去除,需要借助额外的滤波算法进行去噪处理。具有自适应白噪声的完整集成经验模态分解[4-6](complete ensemble empirical mode decomposition with adaptive noise,CEEMDAN)算法是目前应用比较广泛的一种滤波方法,该算法在重构精度与去噪效果方面均优于经验模态分解[7](empirical mode decomposition,EMD)、集成经验模态分解[8](ensemble empirical mode decomposition,EEMD),其主要原理是将监测数据分解为一系列本征模态函数(intrinsic mode function,IMF)分量,识别并保留有效信号分量,舍弃或再处理噪声信号分量,重构形成最终去噪信号。因此,噪声和有效信号IMF分量的界定是影响去噪效果好坏的重要因素。文献[9—10]提出利用相关系数与归一化自相关函数实现噪声IMF分量的选取,但相关系数法太绝对且没有统一标准,自相关归一化函数图像也难以准确识别信噪分量。
交叉证认方法[11-12]对数据本身进行处理,可自适应地选择最优的平滑因子对数据作平滑处理,已经在信号处理领域有了一定的应用。本文利用交叉证认改进CEEMDAN(cross-validation improvement of CEEMDAN, CVCEEMDAN)算法,自适应地确定噪声与有效信号IMF分量,利用小波阈值(wavelet threshold,WT)去噪[13]和奇异谱分解(singular spectrum analysis,SSA)[14-15]分别对噪声及有效信号分量作去噪处理(记为CVCEEMDAN-WT-SSA去噪算法);并以噪声样本熵[16]为评判标准,通过与单一的EMD、EEMD算法及文献[9]算法进行对比,以验证本文算法的准确性与去噪效果。
1 CVCEEMDAN-WT-SSA去噪算法
CVCEEMDAN-WT-SSA去噪算法流程如图1所示。主要步骤如下:首先,利用CEEMDAN算法将原始信号数据分解为一系列IMF分量;其次,通过交叉证认方法识别出噪声IMF分量及有效信号IMF分量;然后,分别对噪声IMF分量及有效信号IMF分量使用WT和SSA进行去噪处理;最后,将两部分降噪结果重构获得最终真实变形监测信号。
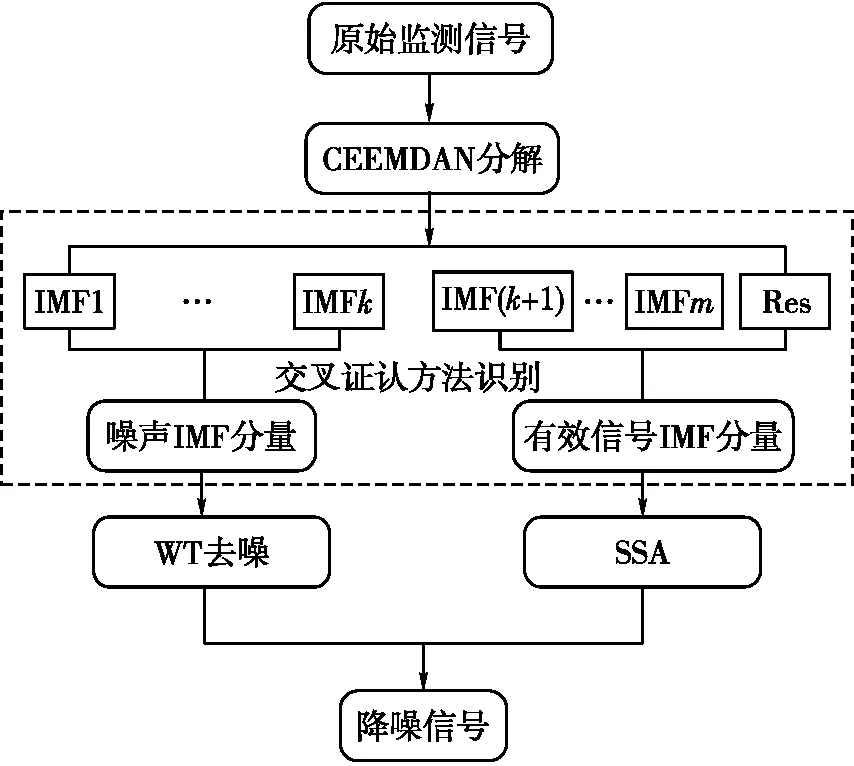
图1 CVCEEMDAN-WT-SSA去噪算法
1.1 基于交叉证认的CEEMDAN算法
交叉证认方法将原始数据划分为两个样本,通过数据内部间的相互验证,自适应地实现有效信号分量和噪声分量的分离[2]。具体算法如下:
(1) 将原始信号数据(ti,yi),i=1,2,…,N,分为奇数样本与偶数样本;选取奇数样本作为滤波样本,对偶数样本进行随机取样,组成证认样本。
(2) 对滤波样本进行CEEMDAN分解,并依次计算k~m(k=1,2,…,m)间IMF分量及残余分量之和;利用三次样条插值得到证认样本的滤波值f′(t2,i)。计算各证认样本对滤波值的方差为
(1)
式中,Pj表示对偶数样本的某一次随机取样;C表示方差值;k表示IMF序列数;n表示证认样本数。
(3) 计算W个证认样本方差的平均值为
(2)
(4) 选择最小平均值及其所对应的k值,则有效信号分量选择第k+1~m的IMF分量及残余分量Res。
1.2 奇异谱分析法
奇异谱分析法通过嵌入维度L将原始数据yi变换为Hankel轨迹矩阵X;对轨迹矩阵X进行奇异值分解X=USVT。其中,U、V均为正交矩阵,由奇异值对应的特征向量组成;对角阵S=diag(λ1,λ2,…,λL)代表X的奇异值。求解各奇异值的贡献率为
(3)
式中,δi代表对应分量所占的能量。由于有效信号IMF分量中的残存噪声所占能量远小于有效信号,选取累计贡献率超过0.99的前n项奇异值及对应的特征向量进行重构,完成降噪处理。
1.3 去噪效果评价
引入样本熵(sample entropy,SE)作为评价去噪效果的标准,熵是反映事物无序状态的一个物理量,无序程度越高,样本熵值越大。在信号处理过程中,去噪前后信号的差值即为所去除的噪声。噪声的样本熵会随着去噪效果的提升逐渐增大,如果去噪不充分或过度去噪导致噪声中含有一部分有效信号,则噪声的样本熵较小。
2 埕岛中心一号生活平台监测试验
2.1 工程概况
胜利油田埕岛中心一号生活平台如图2所示。该平台位于山东东营某海域,平台距离岸边约为8 km,1995年投产,主要功能为管理海上自动化监控、本平台职工食宿、办公及生活污水处理等,是一座四腿式导管架结构平台,总计3层,由基础部分和上部组块与生产平台、消防平台、动力平台、火炬平台连接的栈桥组成。

图2 胜利油田埕岛中心一号生活平台
2.2 GNSS-RTK监测试验
本次试验时间为2021年9月,试验监测仪器为4台海星达H32全能型双频接收机,其中1台作为基准站,其余仪器安装在监测点上。该仪器能同时接收来自GPS、GLONASS、BDS三系统的卫星信号,其仪器水平方向精度为10 mm+1×10-6D,高程方向精度为20 mm+1×10-6D,D为被测点间距离;采样频率设置为10 Hz,连续监测24 h,期间风力4~5级,短时达到7级以上。监测点设置在生活平台顶层甲板的3个角落,将RTK基准站设在陆上岸边。
3 试验数据的处理与分析


图3 原始信号CEEMDAN分解

图4 证认样本的方差均值随k值的变化趋势
采用文献[9]选取噪声IMF分量的方法,求解各IMF分量与原始数据的相关系数R,设定R=0.3作为判断噪声IMF分量与有效信号IMF分量的阈值,计算结果如图5所示;各IMF分量的自相关归一化函数图像,如图6所示。观察得出以下结论:IMF1—IMF5为噪声IMF分量,IMF6—Res为有效信号IMF分量。该结论与交叉证认方法所得结论不同。为验证本文算法的准确性,对文献[9]算法所得噪声IMF分量及有效信号IMF分量同样进行WT与SSA降噪处理(记为ACCEEMDAN-WT-SSA算法),通过对比噪声样本熵对两种算法的去噪效果进行评价。
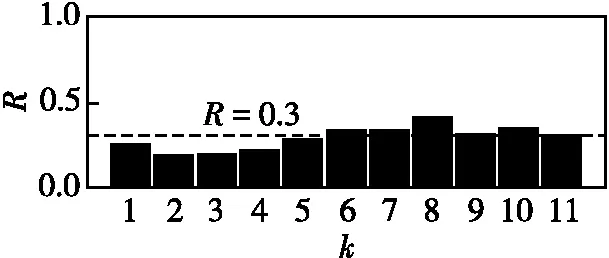
图5 各IMF分量对应的相关系数

图6 各IMF分量的归一化自相关函数图像
原始信号与本文算法的去噪效果如图7所示。可以看出,原始信号中存在大量的毛刺现象,说明原始监测数据包含大量噪声,严重影响对真实结构位移的判断;而经本文算法去噪后,信号中未出现明显的毛刺现象,有效去除了试验监测中存在的多路径误差与随机噪声。此外单独使用EMD、EEMD、CEEMDAN算法对原始数据进行去噪处理,计算上述所有算法的噪声样本熵(见表1),可知本文算法的噪声样本熵值大于ACCEEMDAN-WT-SSA算法所得样本熵,且明显大于单独使用EMD、EEMD、CEEMDAN去噪算法的结果,表明本文算法的去噪效果优于其他去噪算法。

表1 不同算法的噪声样本熵

图7 原始信号及降噪后的真实变形监测信号
4 结 论
本文利用GNSS RTK技术对胜利油田埕岛中心一号生活平台进行了结构动态变形监测。将基于交叉证认改进的CEEMDAN算法、小波阈值去噪算法及奇异谱分析法相结合,对试验数据进行处理与分析,得出以下结论。
(1) 本文算法通过信号序列内部的相互交叉验证选取合适的分解层数作为有效信号IMF分量,具有自适应性。
(2) 以计算噪声的样本熵SE作为评价去噪效果的指标,本文方法相对于EMD、EEMD、CEEMDAN、ACCEMDAN-WT-SSA算法,能够更准确地识别出噪声IMF分量,去噪效果更优。
(3) 本文算法能成功削弱由于海洋的复杂恶劣环境而导致的严重多路径误差与随机噪声,从而获取到海上平台的真实变形位移值。
