基于传感器信息采集检测系统的机电一体化设备状态检测研究
2023-09-02李相波
李相波
(山东黄金矿业(沂南)有限公司,山东 沂南 276300)
1 基于传感器信息采集检测系统的硬件结构
将传统的机械技术和现代电子技术相融合,会使机电一体化设备变得复杂,因此对整个设备各个部件状态信息的获取变得尤为重要。例如,射频识别(Radio Frequency Identification,RFID)检测系统检测速度快且不需要配置外接线路,能够做到便携式设备随时检测,但是易受到设备现场电磁干扰的影响出现错误判断。因此,文章提出一种以CC2420 元件为核心的新式传感器检测系统,从硬件设备和软件系统2 个方面展开论述。
1.1 传感器信息采集检测系统硬件总体结构
传感器信息采集检测系统中,检测模块和无线通信模块是系统的核心。机电一体化传感器信息采集检测系统硬件结构,如图1 所示。

图1 传感器信息采集检测系统硬件结构
1.2 传感器信息采集检测系统的检测模块结构设计与工作流程
检测模块的设计需要借用运动传感、智能传感器和系统提供的电力基础(电压或者电流)设备收集机电一体化设备的信息,包含机电一体化设备某子节点的状态运转是否正常、子节点是待机状态还是一般负荷运转或超负荷运转等。检测模块的感应系统以运动传感器和电力基础传感器为主要感应手段,以智能传感器为辅助感应手段,通过电力因素的变化进一步判断机电一体化设备子节点的状态变化。由图1 可以看出,检测模块各个传感器可以和控制模块的主芯片形成多对一的映射,每个传感器检测到的信息都可以即时发送给控制模块进行判断。为了更加有效地进行检测工作,硬件设计选择嵌入式系统上位机和下位机结构来优化系统,如图2 所示[1]。
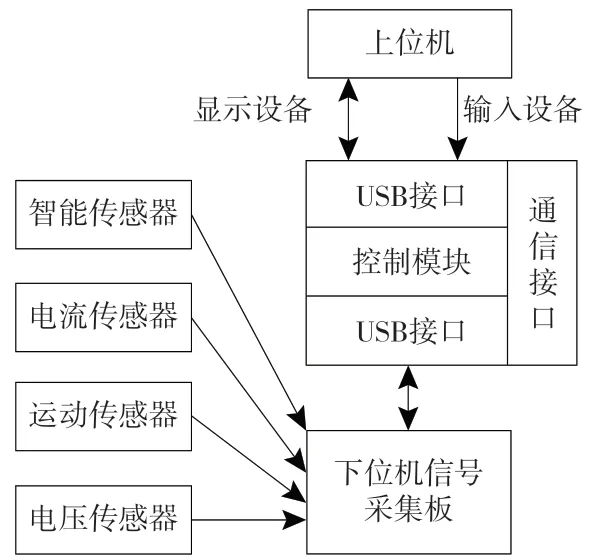
图2 检测模块系统结构
需要说明的是,上位机内部主要以先进的RISC微处理器(Advanced RISC Machines,ARM)为信息处理主要设备,下位机主要以数字信号处理(Digital Signal Processing,DSP)设备为工作信息处理设备。通过图2 可以清晰看出检测模块、控制模块是如何完成信息传递工作的。首先,电流传感器、运动传感器等收集机电一体化设备子节点的判断信息或变化信息,然后将信息传递给下位机。下位机可以提供无线接口和人机互动设备,将信息预处理后转变为机电一体化子节点的设备状态信息。上位机类似传统计算机系统中的“中央处理器”,主要负责汇总分析各个子节点设备通过传感器传递的模拟信号和数字信号。上位机和下位机通过控制模块提供的通用串行总线(Universal Serial Bus,USB)接口实现信息传递[2]。
1.3 传感器信息采集检测系统的无线通信模块结构与分析
无线通信模块的系统结构如图3 所示。通过图3可以明显看出,整体结构的右侧即为CC2420 元件,是通信频率发射及接收设备的主体。整体结构的左侧为天线部分。以CC2420 为主体结构的无线通信模块能实现精准多-多映射式匹配组网,为机电一体化设备传感器子结构所在的检测模块和上位机互相联系构建基础。CC2420 元件中的调制信号是偏移四相相移键控(Offset-Quadrature Phase Shift Keying,O-QPSK)方式,能够避免180°相位跳变问题,在实际工作中的抽样选择中能够使得分支线路交替式抽样,确保信号的稳定性[3]。

图3 无线通信模块系统结构
2 基于传感器信息采集检测系统的软件设计
2.1 通信信号滤波问题处理
在机电一体化设备工作现场,由于各种设备发出的干扰信号较多,实际通信中需要用防脉冲滑动滤波法过滤干扰信号。
滑动滤波法需要先获取平均值,具体计算公式为
式中:Y为想要获取的平均值;N为信号个数;X(k)为序列;k为序列号。获取滑动数据平均值后,把一系列数据定义成N的队列,队列即滑动数据的采集范围,不断通过式(1)获取数据时刻保持滑动队列数值的同步性,然后在去除最小值和最大值的基础上计算平均值,这样得到的信号就是当时最有效的信号数值,该方法即防脉冲滑动滤波法[4]。
2.2 传感器信息采集检测系统设备状态原理
若想判断机电一体化设备各个工作状态稳定与否,需要以传感器收集的信息作为评估依据。在传感器系统通信畅通且稳定的情况下,用特征向量矩阵可以明确反映各个传感器的信息特征。具体矩阵构建以矢量特征表示传感器特征,即H(a)={a1,a2,a3,…,ad},假设有M个矢量设备样本,而M个样本的状态个数为P,用矩阵表示为
式中:Z为状态模板矩阵;a为传感器指标,角标用于区别传感器和指标参数;vm为传感器稳定性矢量结果;M为全部传感器系统的矢量累加。
通过式(2)可以看出,如果样本之间的特征差很小,那么被测试的设备状态样本就和模板状态类似度高度一致。
为了计算类似度(相似度),用数学方法进行评估,表达式为
式中:ωij为标准类似度;dg1i为最小类似度;dg2i为最大类似度。随着机电一体化设备状态的不断变化,定期用软件系统评估被检测设备状态P和理想状态模板的相识度,就可以完成即时机电一体化设备的检测工作。
3 基于传感器信息采集检测系统的机电一体化模拟实验与分析
为了更准确地评估传感器系统对机电一体化设备状态检测能力,现设计以下仿真实验。
3.1 实验环境及数据收集分析
采集实验选择的机电一体化设备中的驱动电流数据信息、功率传感器信息、电流传感器信息等参数,采集时间为100 ms 一次。对于采集时间的设定,一般收集数据越多,实验模拟程度越接近客观事实,但是过多的数据处理会耗费更多的时间。考虑到实验平台计算机的性能,需要把时间设定和计算机处理器处理能力相匹配。把收集样本时间总数设定为T,N为样本数值,收集时间为48 h。在收集时间结束时,需要预处理收集到的数据,去除不符合实验要求的数据后得到的实验数据为3 000 个[5]。
3.2 基于传感器信息采集检测系统的错误率及有效性分析
模拟实验中,为了更好地验证提出的传感器系统的有效性和精准性,需要以3 000个数据作为实验基础,然后用差异性较大的检测系统检测机电一体化设备的状态,以增加设备组本身的干扰性,以便汇总分析各种传感器采集信息系统的错误率和有效性,检测传感器信息系统的抗干扰能力。实验选取基于RFID 的检测系统和基于机器学习的检测系统,2 种检测系统和本文研究的检测系统之间的对比,如表1 所示。
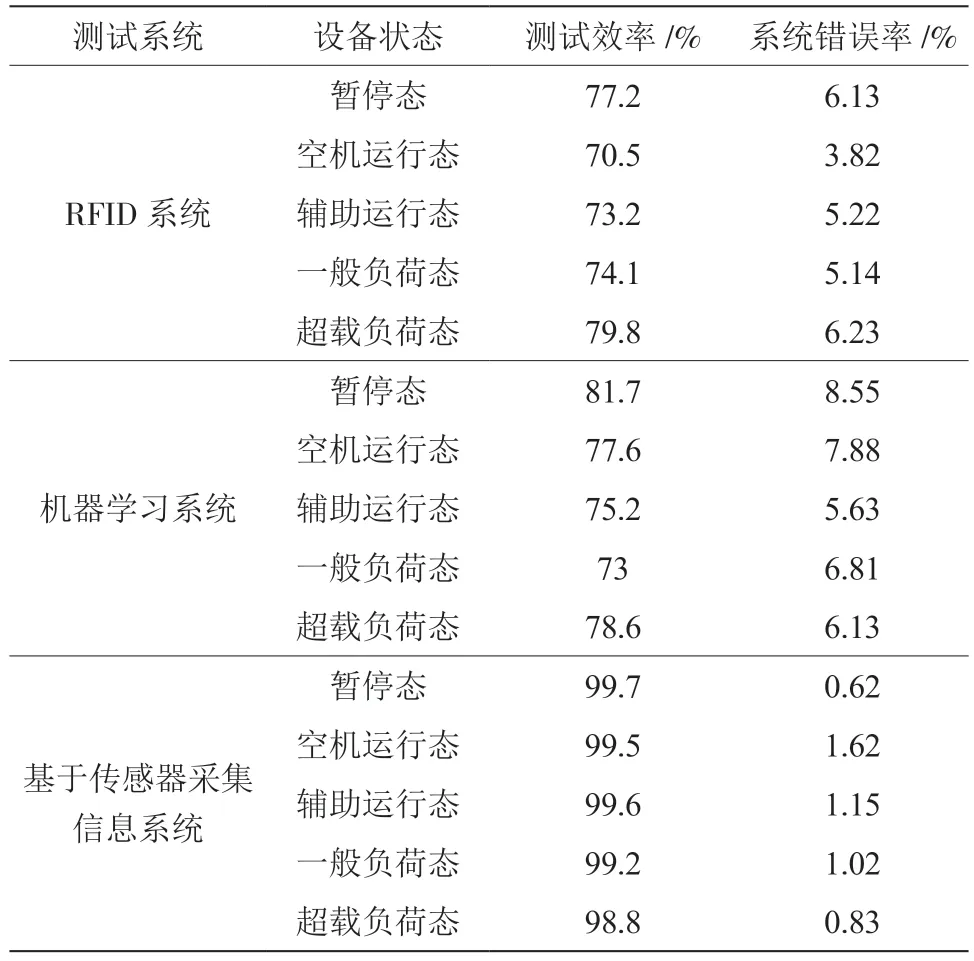
表1 3 种测试系统测试效率及系统错误率对比表
通过表1 可以看出:在电磁干扰增加到一定程度的情况下,提出的基于传感器采集信息系统表现最低的一项数值为超载负荷状态,测试效率为98.8%,剩余机器设备状态检测率都超过了99%。设计的设备状态检测系统能更精准地反映机电一体化设备的真实状态。RFID 系统和机器学习系统整体表现差距较大,数值分布在70%~90%,即2 种设计方案在强电磁干扰情况下的精准性有待优化。可见,设计的基于传感器采集信息系统精准、有效且抗干扰能力强。
4 结 论
从实际情况出发,考虑在一定程度的电磁干扰情况下,设计基于传感器信息采集检测系统来获取机电一体化设备状态。从硬件结构和软件分析2 个方面进行阐述,然后用仿真模拟实验比较分析RFID 系统、机器学习系统和所提系统的实际表现,可知设计的系统在一定电磁干扰程度下精准且有效。需要指出的是,模拟实验具有一定的条件约束,而实际应用中不同的机电一体化设备有很大差异,需要适时作出调整和优化。
