激光诱导石墨烯基柔性应变传感器的传感行为分析
2023-08-31房国庆何雨昕季善鹏刘爱萍
房国庆 何雨昕 季善鹏 刘爱萍


摘 要: 基于柔性聚酰亞胺(PI)基底的应变传感器通常在轴向拉伸或压缩下的变形有限,灵敏度不高,在多维柔性应变传感器方面的发展受到了限制。为了制备具有多维应变传感能力和高检测灵敏度的柔性传感器,采用紫外激光烧蚀PI薄膜制备图案化石墨烯材料,利用聚乙烯(PE)泡棉丙烯酸双面胶带转印图案化石墨烯,并构建双层石墨烯基柔性应变传感器。对激光诱导石墨烯的微观结构进行表征分析,并测试传感器在不同变形下的传感性能,实验结果表明:激光诱导的石墨烯薄膜呈现蓬松的孔状结构,该结构在不同应变状态下呈现拉伸或压缩状态,从而改变了石墨烯的导电通路,导致石墨烯薄膜电阻相应地增大或减小。双层石墨烯基柔性应变传感器可以感受不同方向的拉、压、弯、扭等复杂形变,并表现出很高的灵敏度、良好的线性度和优异的机械重复性。此外,该柔性应变传感器能够适应人体四肢或关节处的多维运动,可对手指弯曲、手掌弯曲等肢体运动进行有效监测和识别,并实现摩尔斯电码的编码。该激光诱导石墨烯基柔性应变传感器在手势识别、智能化控制和人机交互等领域有广阔的应用前景。
关键词: 激光诱导;石墨烯;应变传感器;肢体运动监测;摩尔斯电码
中图分类号: TB34
文献标志码: A
文章编号: 1673-3851 (2023) 01-0009-08
引文格式:房国庆,何雨昕,季善鹏,等. 激光诱导石墨烯基柔性应变传感器的传感行为分析[J]. 浙江理工大学学报(自然科学),2023,49(1):9-16.
Reference Format: FANG Guoqing, HE Yuxin, JI Shanpeng,et al. Analysis of sensing behavior of laser-induced graphene-based flexible strain sensor[J]. Journal of Zhejiang Sci-Tech University,2023,49(1):9-16.
Analysis of sensing behavior of laser-induced graphene-based flexible strain sensor
FANG Guoqinga, HE Yuxinb, JI Shanpenga, LIU Aipingb
(a.School of Materials Science & Engineering; b.School of Science, Zhejiang Sci-Tech University, Hangzhou 310018, China)
Abstract: Strain sensors based on flexible polyimide (PI) substrates usually have limited deformation and low sensitivity under axial tension or compression, which restricts their development as multi-dimensional flexible strain sensors. In order to prepare a sensor with multi-dimensional strain sensing ability and high detection sensitivity, a patterned graphene material was prepared by ultraviolet laser ablation of PI film, and then it was transferred with a polyethylene (PE) foam acrylic double-sided adhesive to construct a double-layer graphene-based flexible strain sensor. The microstructure of laser-induced graphene was characterized and analyzed, and the sensing property of the sensor under different deformation was tested. The experimental results showed that the laser-induced graphene film showed a fluffy porous structure and presented tensile or compressive states under different strains, thus changing the conduction path of grapheme and leading to the increase or decrease of the resistance of graphene film. The double-layer graphene-based flexible sensor can sense complex deformations such as tension, compression, bending and torsion in different directions and show high sensitivity, good linearity and excellent mechanical repeatability. In addition, the double-layer sensor can adapt to multi-dimensional movement of human limbs or joints, effectively monitor and recognize finger bending, palm bending and other limb movements, and achieve Morse code coding. The laser-induced graphene-based flexible strain sensor prepared has a broad application prospect in gesture recognition, intelligent control, man-machine interaction and other fields.
Key words: laser-induced; graphene; strain sensor; limb movement monitoring; Morse code
0 引 言
随着物联网技术的发展和人们对健康生活需求的不断提高,柔性可穿戴传感器已经被广泛应用在人体健康监测、智能控制以及人机交互等诸多领域[1-4]。柔性应变传感器作为采集外部机械信号的重要媒介,是柔性传感系统中不可缺少的组成部分[5-8]。电阻式应变传感器因结构简单、成本低廉、检测范围宽、灵敏度可调等特点,在柔性可穿戴传感领域有着广阔的应用前景[9-10]。虽然近年来电阻式柔性应变传感器在传感性能方面有了极大的提升,但大多数传感器只能检测预设方向的应变,例如只能感应某一方向的拉伸应变,无法同时感应其他方向或其他形式的变形,不具有方向识别能力[11]。开发新型的柔性应变传感器并对复杂而精细的人体活动进行传感监测具有一定的现实意义。
石墨烯材料由于具有电子迁移率高、比表面积大、机械强度高、化学稳定性好等优点[12-13],被视为制备柔性应变传感器的理想材料之一。传统的石墨烯制备方法包括机械剥离法、化学气相沉积法、氧化还原法等[14],然而这些方法存在着成本高、污染严重、制备时间长等缺点。近年来,激光诱导技术[15-16]的应用有效克服了这些问题。激光按照特定功率在聚酰亚胺(PI)膜上扫描时,会在PI膜表面生成图案化的三维多孔结构的石墨烯材料,从而简化了石墨烯的制备流程,而且有利于电极的图案化设计。因此,激光诱导石墨烯材料在电化学传感器、物理传感器、新型能源系统等诸多领域得到了广泛应用。
然而,PI基底只能发生弯曲变形,难以进行拉伸和压缩变形,大大限制了激光诱导石墨烯的应用场景,所以需要将激光诱导的石墨烯转移到柔性可拉伸的基底材料表面。目前常用的柔性基底为聚二甲基硅氧烷(PDMS),虽然PDMS的机械弹性好,然而其机械强度不高,拉伸幅度过大会发生断裂,韧性较差[17]。相比之下,聚乙烯(PE)泡棉具有三维独立闭孔的泡孔结构,表面光滑,回弹性优良,力学强度高,隔热、防水、耐化学腐蚀等性能优良,被广泛应用于农业、工业等领域[18]。另外,由于PE泡棉双面胶带表面涂有黏性极强的丙烯酸,能够与石墨烯紧密结合并将其从PI基底上剥离下来,是低成本转印激光诱导石墨烯的极佳材料之一。为此,本文选择PE泡棉双面胶带转印激光诱导石墨烯,低成本制备具有多维力感知能力的柔性应变传感器。
本文利用355 nm的紫外激光器烧蚀PI薄膜获得石墨烯材料,利用PE泡棉双面胶带对石墨烯薄膜进行转印,并对转印的石墨烯材料进行表征分析。随后将两个转印的石墨烯电极垂直相向贴合,构造双层石墨烯结构,以提供石墨烯基传感器多个方向的变形能力。其次,探究石墨烯基柔性应变传感器的传感行为,分析其灵敏度、线性度、稳定性等基本性能,并对简单的肢体运动(如手指、手掌弯曲等)进行监测。最后,考察石墨烯傳感器在摩尔斯电码编码方面的应用潜能。
1 实验部分
1.1 实验材料与仪器
主要实验材料:商用PI薄膜(厚度50 μm),购自深圳市金绿叶电子材料有限公司;PE泡棉双面胶带(CIP66),购自明尼苏达矿业与制造公司;无水乙醇,分析纯,购自杭州高晶精细化工有限公司;导电铜箔胶带(YXW-229),购自深圳市旺兴胶带有限公司。
主要实验仪器:CY-ZW3W型紫外激光切割机(深圳市超越激光智能装备股份有限公司),吉时利2400数字源表(中检科电仪器有限公司),MX-0350型应力应变测试仪(江苏摩信工业系统有限公司),D8 Discover型X射线衍射仪(XRD,Bruker公司),GeminiSEM500型场发射扫描电子显微镜(SEM,Carl Zeiss公司),K-ALPHA型X射线光电子能谱仪(XPS,Thermo Fisher科技公司),LabRAM HR Evolution型显微激光拉曼光谱仪(Raman spectra,HORIBA Jobin Yvon公司)。
1.2 实验方法
1.2.1 激光诱导石墨烯的制备
在硅胶垫上洒上无水乙醇,将50 μm厚的PI膜贴到硅胶垫上,并用无水乙醇擦拭PI膜表面,去除表面污染物。调整激光参数,确定激光聚焦在样品上方4 mm处,设置激光扫描速度为50 mm/s,激光的Q波脉冲频率为150 kHz,扫描间距为0.02 mm,脉冲宽度为1 μs;点击标刻,将计算机上事先设计好的图案化电极烧蚀在PI膜表面,制备传感电极。
1.2.2 双层柔性应变传感器的制备
双层石墨烯基柔性应变传感器的制备流程如图1所示。具体流程如下:首先,将PE泡棉双面胶带贴合到已经制作好的激光诱导石墨烯电极上,完全覆盖石墨烯部分,用力按压使胶带紧密贴合石墨烯,随后撕开PI层和胶带层,将PI基底上的石墨烯薄膜转印到PE双面胶带上;其次,利用激光器的切割功能切割铜箔,获得传感器引脚,并贴到石墨烯电极上(保持铜箔与石墨烯紧密接触)。最后,将两个相同的石墨烯电极垂直贴合在一起,石墨烯材料部分紧密接触,得到双层石墨烯柔性传感器。
1.3 测试与表征
采用SEM观察激光诱导石墨烯的微观形貌,测试前利用PE泡棉双面胶带转印PI基底上的石墨烯。采用拉曼光谱仪和X射线衍射仪研究激光诱导石墨烯的微观结构,设置拉曼光谱仪波数采集范围为1200~3000 cm-1,设置X射线衍射仪扫描范围为10°~50°。采用X射线光电子能谱仪测试激光诱导石墨烯的成分,能量扫描范围为0~1400 eV。利用应力应变测试仪和吉时利2400数字源表探究传感器在不同应变下的传感性能。调节应力应变测试仪的拉伸速率为1 mm/min,压缩速率为5 mm/min,并利用2400数字源表捕捉传感器电阻信号的变化。拉伸和压缩应变时测量模式设置为R-T模式,弯曲和扭转应变时测量模式设置为I-V模式,绘制出应变与电阻变化率间的函数关系图。
2 结果与讨论
2.1 激光诱导石墨烯的微观结构分析
利用计算机软件设计石墨烯电极的形状,其中心位置是一个10 mm×10 mm的正方形,两端引脚为3 mm×15 mm的矩形(图2 (a))。利用紫外激光烧蚀PI基底获得激光诱导石墨烯。图2(b)为PE泡棉双面胶带转印后的石墨烯SEM图像,石墨烯呈现蓬松多孔的三维结构并伴有一些不规则裂纹。从放大的SEM图像可以看到,石墨烯薄膜微孔的尺寸分布在一微米到数十微米之间。石墨烯与PI之间存在着明显的分层,石墨烯膜的厚度约为60 μm(图2 (c))。石墨烯的拉曼光谱显示出三个特征峰,分别为1350 cm-1处的D峰、1580 cm-1处的G峰与2700 cm-1处的2D峰(图2 (d))。通常认为,G峰与2D峰的强度比与石墨烯的层数有关,即G峰的高度明显高于2D峰,说明激光诱导石墨烯具有多层堆叠的结构[19]。石墨烯的XRD图谱也证实了这一观点。如图2(e)所示,石墨烯的XRD曲线在2θ=23.8°附近出现了一个宽的衍射峰,归因于石墨(002)晶面的衍射峰。由于激光诱导石墨烯在微观上具有多层纳米片堆叠的多孔结构,因此衍射峰较宽,峰强较弱[20]。进一步利用XPS技术分析激光诱导石墨烯的原子构成及其相对含量。样品主要包含C、N、O三种元素(图2 (f)),C与O元素的含量比约为6∶1,这是由于激光烧蚀过程中PI膜分解,部分N、O元素以气体的形式释放出来并参与碳原子重排,形成石墨烯网络[21]。利用2400数字源表测得激光诱导石墨烯的电阻约为0.5~2.0 kΩ·cm,表明本文制备的石墨烯适合用作传感材料。
2.2 柔性应变传感器的传感性能分析
与PI基底相比,PE泡棉双面胶带具有更好的应变性能,能够实现拉伸、压缩、弯曲、扭转等各种形变,与激光诱导的石墨烯复合,有利于传感器传感性能的提升。利用吉时利2400数字源表测量传感器在不同形变下的阻值变化,并分析传感器形变与电学性能变化间的函数关系。由于双层石墨烯柔性传感器呈现十字型结构,因而选择任意一组相对的电极引脚并固定在应力应变测试仪上,测试传感器在拉伸过程中的电阻变化。从图3(a)所示的拉伸响应曲线看到(插入图为用手拉伸传感器发生形变的示意图),在应变为35%处的曲线可分成前后两段。前段拉伸过程中传感器的形变较小,伸长的PE泡棉基底带动激光诱导石墨烯伸长,导致三维空洞间隙不断增大,电阻值呈线性增大趋势。传感器的灵敏度因子GF可以通过计算电阻变化率与形变量的比值得到,即GF=ΔR/Rε=80(其中:ΔR/R为电阻变化率,ε为形变量)。后段拉伸过程中由于基底形变过大,石墨烯三维多孔间隙进一步增大并出现更多裂纹,导电通路减少导致电阻急剧增大,灵敏度进一步提升(GF>1500)。在压缩变形测试模式下,将双层石墨烯传感器的两个相邻电极引脚与2400数字源表的电极相连,记录压缩变形过程中传感器电阻的变化情况。从图3(b)中可以看到(插入图为用手按压传感器发生形变的示意图),在受压状态下石墨烯的三维多孔结构变得致密,导电通路距离缩短,传感器的导电性增强,电阻减小。通过线性拟合得到的GF在0.2到0.3之间,线性回归系数为R2=97.934%,表明传感器的压缩应变与电阻变化率呈现良好的线性关系。
双层石墨烯传感器除了可以感知单一方向的拉伸和压缩应变以外,还可以感知复杂的弯曲和扭曲应变。首先将传感器贴到柔软的塑料卡片上,通过步进电机推动机械滑块运动,带动塑料卡片弯曲变形。由于传感器紧密贴合在塑料卡片上并产生了与之相同的弯曲变形,因此通过控制步进电机的运行距离即可控制传感器的弯曲曲率。当将2400数字源表的两个电极连接在传感器相邻的引脚上,测定不同弯曲角度下传感器的伏安特性曲线,结果显示,当弯曲曲率由0.05 cm-1变化到0.30 cm-1时,传感器的电阻不断增大(图4 (a),插入图为用手弯曲传感器发生形变的示意图),即在弯曲变形中拉伸是主要形变因素。图4(b)显示了不同扭转角度下传感器的伏安特性曲线(插入图为用手扭转传感器发生形变的示意图),随着扭转角度的增加传感器的电阻减小,说明扭转过程中压缩是主要形变因素。可见,双层石墨烯应变传感器能够感知复杂多方向的应变,因而可以进行更复杂的人体运动信号监测。
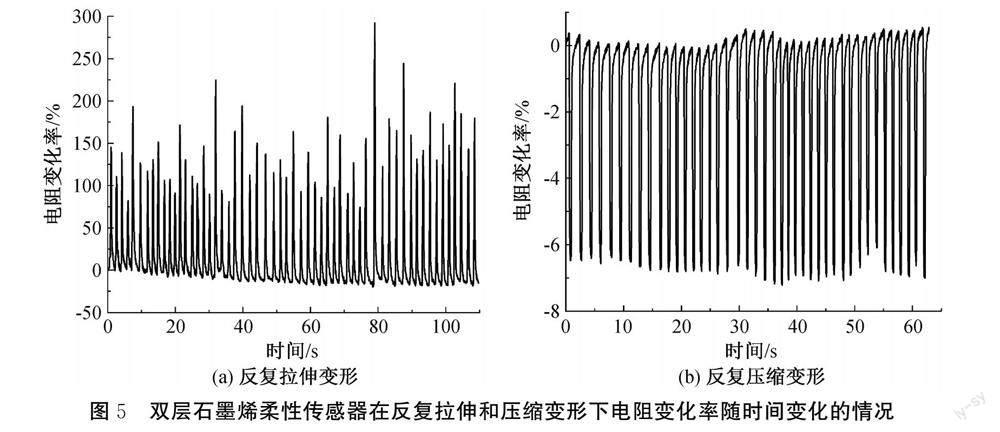
为了探究传感器的抗疲劳性,对拉伸和压缩两个变形过程中传感器的传感行为进行了重复性测试。双层石墨烯柔性传感器在反复拉伸和压缩变形下电阻变化率随时间变化的情况,如图5(a)和图5(b)所示,传感器经过多次反复拉伸和压缩变形,电阻变化率保持相当,且传感器恢复原状后电阻值基本保持不变,表明传感器具有很好的机械重复性和穩定性,可以满足多次反复使用的要求。
2.3 柔性应变传感器对人体手部运动信号的监测及摩尔斯电码的加密编码
人类通过复杂的肢体动作传达丰富的信息,由于大部分运动伴有复杂的受力过程,可以借助多方向敏感的应变传感器进行运动捕捉和复杂信息分析。本文以手指和手掌的运动为例考察双层石墨烯基应变传感器对人体手部运动的监测和识别能力,如图6(a)和图6(b)所示。图6(c)表示手指弯曲的运动信息,当手指由伸直状态变为弯曲状态时,传感器被拉伸,电阻迅速增大。当手指再次伸直,传感器的电阻恢复原来状态,多次反复运动得到的电阻变化信号稳定,表明传感器的稳定性和重现性良好。图6(d)表示手掌运动的三种状态信息,状态一为手掌伸平状态,表现为原始的电阻信号;状态二为四指向内弯曲,传感器受压,电阻减小;状态三为所有手指均向中心弯曲,传感器进一步受压,电阻变化更加明显,峰值更强。重复手掌变形运动得到的电信号稳定,重复性良好。因此,根据电阻信号的峰值大小及其持续时间长短即可判断手掌的运动状态。反之,通过控制手掌不同的运动形式,能够实现特定信号的输出。
生活中人们通常需要将信息进行加密以保证安全性。与二进制代码相比,摩尔斯电码通过五种代码(包括点、短线以及三种停顿状态)的不同排列顺序来表达不同的英文字母、数字和标点符号,在无线电通信等领域有广泛的应用[22]。传统的摩尔斯电码必须通过特定的电子设备进行编码,设备复杂且笨重。如果利用柔性可穿戴的传感设备进行摩尔斯电码的编码则具有携带方便、成本低廉、隐蔽性好等优势。基于此,本文将双层石墨烯基柔性应变传感器贴合在手掌内部,通过控制手掌弯曲的时间来实现“· ”和“—”两种状态,并通过伸平状态的持续时间控制三种停顿间隔。通过查阅摩尔斯电码表,可以得知字母“A”“B”、“C”“D”“E”和“F”的摩尔斯电码分别表示为“· —”“— · · ·”“— · — ·”“— · ·”“· ”和“· · — ·”。通过控制手掌的弯曲运动并利用双层石墨烯基柔性应变传感器采集手掌运动的信号,从而获得代表这6个字母的摩尔斯电码的电学信号(图7)。同理,可以利用该传感器获得其他20个英文字母的摩尔斯电码的电学信号,或编码“ZSTU”的电信号(图8),实现简单的信息加密。由于双层石墨烯基柔性应变传感器能够灵活、隐蔽、不受干扰地完成摩尔斯电码的编码工作,因此在加密技术、无线电通信、遇难求救等相关领域有很好的应用前景。
3 结 论
本文利用355 nm紫外激光器在PI薄膜上烧蚀出图案化石墨烯,使用PE泡棉双面胶带转印石墨烯电极,并将两个转印后的石墨烯电极垂直相向贴合,制作出具有多方向应变传感能力的双层石墨烯基柔性应变传感器;通过吉时利2400数字源表测试传感器在拉、压、弯、扭等应变状态下的传感信号,探究该传感器的传感性能(包括灵敏度、线性度、重复性等),并考察其在手部运动监测和摩尔斯编码方面的应用潜能。主要研究结论如下:
a)采用紫外激光烧蚀PI薄膜获得的石墨烯呈现蓬松多孔的结构,孔径由一微米到数十微米不等,并伴有不规则的裂纹,该结构对石墨烯传感性能的调控起到至关重要的作用。
b)采用PE泡棉双面胶带转印激光诱导的石墨烯,借助PE泡棉良好的应变能力,双层石墨烯基柔性应变传感器在拉伸、压缩、弯曲、扭转等多种应变下均展现出较高的灵敏度(拉伸变形下GF达到80左右,压缩变形下GF处于0.2~0.3)、良好的线性度和机械重复性。
c)双层石墨烯基柔性应变传感器能感知和分辨手指弯曲、手掌弯曲等多维肢体形变运动,并通过调整手掌运动方式和动作维持时间实现摩尔斯电码的编码,为手势识别、手语通信、智能化控制和人机交互等领域的应用提供了可行性。
参考文献:
[1]Kim J, Campbell A S, de vila B E F, et al. Wearable biosensors for healthcare monitoring[J]. Nature Biotechnology, 2019, 37(4): 389-406.
[2]Heikenfeld J, Jajack A, Rogers J, et al. Wearable sensors: Modalities, challenges, and prospects[J]. Lab on a Chip, 2018, 18(2): 217-248.
[3]Son D, Kang J, Vardoulis O, et al. An integrated self-healable electronic skin system fabricated via dynamic reconstruction of a nanostructured conducting network[J]. Nature Nanotechnology, 2018, 13(11): 1057-1065.
[4]Hua Q, Sun J, Liu H, et al. Skin-inspired highly stretchable and conformable matrix networks for multifunctional sensing[J]. Nature Communications, 2018, 9(1): 1-11.
[5]Yan T, Wang Z, Pan Z J. Flexible strain sensors fabricated using carbon-based nanomaterials: A review[J]. Current Opinion in Solid State and Materials Science, 2018, 22(6): 213-228.
[6]Fu Y F, Li Y Q, Liu Y F, et al. High-performance structural flexible strain sensors based on graphene-coated glass fabric/silicone composite[J]. ACS Applied Materials & Interfaces, 2018, 10(41): 35503-35509.
[7]Jian M Q, Xia K L, Wang Q, et al. Flexible and highly sensitive pressure sensors based on bionic hierarchical structures[J]. Advanced Functional Materials, 2017, 27(9): 1606066.
[8]董岳峰, 張卫英, 陈立樟, 等. 海绵基压阻式柔性应变传感器的研究进展[J]. 高分子材料科学与工程, 2021, 37(12): 159-165.
[9]Ma Y, Liu N, Li L, et al. A highly flexible and sensitive piezoresistive sensor based on MXene with greatly changed interlayer distances[J]. Nature Communications, 2017, 8(1): 1-8.
[10]王燕山, 张梅菊, 刘德峰. 石墨烯柔性压力/应变传感器的研究进展[J]. 测控技术, 2021, 40(11): 39-47.
[11]Wang Z, Bu T, Li Y, et al. Multidimensional force sensors based on triboelectric nanogenerators for electronic skin[J]. ACS Applied Materials & Interfaces, 2021, 13(47): 56320-56328.
[12]Liu Q, Chen J, Li Y R, et al. High-performance strain sensors with fish-scale-like graphene-sensing layers for full-range detection of human motions[J]. ACS Nano, 2016, 10(8): 7901-7906.
[13]Chen S, Jiang K, Lou Z, et al. Recent developments in graphene-based tactile sensors and E-skins[J]. Advanced Materials Technologies, 2018, 3(2): 1700248.
[14]Ullah S, Hasan M, Ta H Q, et al. Synthesis of doped porous 3D graphene structures by chemical vapor deposition and its applications[J]. Advanced Functional Materials, 2019, 29(48): 1904457.
[15]Lin J, Peng Z, Liu Y, et al. Laser-induced porous graphene films from commercial polymers[J]. Nature Communications, 2014, 5(1): 1-8.
[16]Carvalho A F, Fernandes A J S, Leito C, et al. Laser-induced graphene strain sensors produced by ultraviolet irradiation of polyimide[J]. Advanced Functional Materials, 2018, 28(52): 1805271.
[17]Hassanin H, Mohammadkhani A, Jiang K. Fabrication of hybrid nanostructured arrays using a PDMS/PDMS replication process[J]. Lab on a Chip, 2012, 12(20): 4160-4167.
[18]Kmetty A, Tomin M, Barany T, et al. Static and dynamic mechanical characterization of cross-linked polyethylene foams: The effect of density[J]. Express Polymer Letters, 2020, 14(5): 503-509.
[19]Mahmood F, Sun Y S, Wan C X. Biomass-derived porous graphene for electrochemical sensing of dopamine[J]. RSC Advances, 2021, 11(25): 15410-15415.
[20]Zhu C C, Tao L Q, Peng Z R, et al. An integrated luminescent information encryption-decryption and anticounterfeiting chip based on laser induced graphene[J]. Advanced Functional Materials, 2021, 31(43): 2103255.
[21]韓冬冬, 蔡青, 李纪超, 等. 激光诱导石墨烯水下超疏油仿生表面的制备[J]. 激光与光电子学进展, 2020, 57(15): 163-168.
[22]Yang C H. Adaptive Morse code communication system for severely disabled individuals[J]. Medical Engineering & Physics, 2000, 22(1): 59-66.
(责任编辑:刘国金编辑)
收稿日期: 2022-03-16 网络出版日期:2022-06-02网络出版日期
基金项目: 国家自然科学基金项目(51572242)
作者简介: 房国庆(1996- ),男,江苏睢宁人,硕士研究生,主要从事柔性可穿戴传感器制备方面的研究。
通信作者: 刘爱萍,E-mail:aipingwz@163.com