基于改进正交匹配追踪算法的振动信号修复方法
2023-08-31王桂宝李一飞
杨 坤, 王桂宝,2*, 王 磊,2, 王 楠,2, 李一飞
1.陕西理工大学 机械工程学院, 陕西 汉中 723000;2.陕西省工业自动化重点实验室, 陕西 汉中 723000
机械振动信号蕴含着设备运行过程中的重要信息,在监测旋转机械设备的运行状态时,需要采集设备机组主要部件的振动信号,运用信号变换等方法把时域信号转换到频域内,继而进行设备故障的诊断与处理[1]。在实测振动信号的采集过程中,由于传感器故障等因素而导致信号采集突然终止,某些时间段内,设备运行状态的信号数据丢失,当运行过程不可逆时,不可能重新采样[2]。在这种情况下,如果没有对有损信号进行修复,直接使用这些数据,会对信号分析产生背道而驰的结果。相反,如果能够根据采集到的状态数据来估计缺失的数据,那么对提高信号处理结果的准确性会有很大的帮助[3]。
在振动信号修复的研究方向中,张新鹏等[4]详细描述了信号修复模型的数学原理,根据不完整数据构造压缩感知(Compressive Sensing,CS)框架下的观测矩阵,针对振动信号的特点建立了稀疏表示字典矩阵,在此基础上利用正交匹配追踪算法(Orthogonal Matching Pursuit,OMP)重构出完整的振动信号。余路等[5]提出利用K-奇异值分解(K-Singular Value Decomposition,K-SVD)学习算法构造稀疏基,优化了缺损信号修复效果。马云飞等[6]提出一种将贝叶斯与压缩感知结合的方法以解决连续缺失信号修复问题,先对连续缺损信号进行经验模态分解,然后将得到的模式分量用贝叶斯算法进行修复,再将所有修复的基本模式分量叠加得到原始信号。
数值定义的有损信号经过离散余弦变换(Discrete Cosine Transform,DCT)字典的稀疏表示后,不为零的稀疏表示系数越少,说明该信号的稀疏度越低,重构后的信号会更接近原始信号。由于实测振动信号复杂多变,实测信号经过稀疏表示后与仿真信号相比较可知,实测信号的稀疏度较高,无法在时域精确地恢复出每个丢失数据,重构误差比较大。
基于这些问题,本文将改进的正交匹配追踪算法(Improved Orthogonal Matching Pursuit,IOMP)引入振动信号修复的重构阶段,设计连续缺失信号数据所对应的测量矩阵,采用DCT字典来对信号进行稀疏表示,使实测信号与仿真信号满足压缩感知的先决条件。用此方法验证损失比为10%、20%两种情况下连续缺失振动信号的修复,将OMP与IOMP算法的修复结果作对比,并从统计数据定量分析比较进一步证实。
1 振动信号数据修复的理论模型
1.1 信号稀疏化的方法
目前,用来进行信号稀疏表示的方法有很多,对不同类型的信号使用不同的稀疏字典其效果是千差万别的。离散余弦变换的种类有好多种,不同类型的变换应用在不同的领域中。本文的研究对象主要是滚动轴承的振动信号,这种类型的信号在离散余弦变换下具有不错的稀疏性。振动信号属于一维信号,它可表示为x∈RN,该信号离散余弦正反变换对的公式为
(1)
(2)
将式(2)写成矩阵形式,并且进行单位化处理,可得
X=C·x,
(3)
式中,x=[x(0),x(1),…,x(N-1)]T为时域向量组,X=[X(0),X(1),…,X(N-1)]T为对应的离散余弦变换域向量组,C是一个正交矩阵。式(3)也可写成x=CTX,矩阵CT便可作为DCT字典矩阵Ψ=CT来使用。矩阵C的元素可通过式(4)进行计算:
(4)
由压缩感知理论知,若一维信号x∈RN在DCT矩阵下是稀疏的,则信号x在该字典矩阵下的稀疏表示为
x=Ψs,
(5)
式中,Ψ为稀疏矩阵,s为系数向量。
利用DCT进行信号的稀疏表示,使用比较方便,可作为一种常用的稀疏化字典的生成方法。
1.2 观测矩阵的构造及其相关性分析
振动信号数据修复模型的观测矩阵与传统压缩感知理论下的观测矩阵是不同的,前者需要借助单位矩阵的变换来构造观测矩阵,后者可直接使用现有的观测矩阵对振动信号进行降维投影,因此,设计一种修复模型下的观测矩阵是实现信号修复重构的重要环节。
在原始信号x∈RN的采集过程中,由于传感器故障、信号传输或线路接触不良等原因得到了有损信号x′∈RN,有损信号在缺损时间内的数据输入为零,这就需要去除有损信号中第i行(i∈Z,其中Z为所有零值元素对应位置索引的集合),其他行元素的数值大小和次序保持不变,这样可以得到观测信号y∈RM(M≪N)。
此外定义IN∈RN×N为单位矩阵,将IN中的第j行(j∈Z)去除,其他行数不变,这样得到的矩阵Φ∈RM×N(M≪N)便可作为信号修复模型下的观测矩阵。
文献[8-11]证明了压缩传感的重构阶段需要满足的条件:感知矩阵A=ΦΨ必须满足约束等距条件准则(Restricted Isometry Property,RIP)。但通常情况下,判断感知矩阵A是否满足约束等距条件是一个NP-hard问题,因此文献[11]指出RIP的等价条件为:若观测矩阵Φ与稀疏表示字典矩阵Ψ不相关,即要求Φ的行向量不能由Ψ的列向量表示,且Ψ的列向量不能由Φ的行向量表示。满足上述条件后,定义它们两者之间的相关性:
(6)


(7)
1.3 OMP重构算法及其改进方法
1.3.1OMP重构算法
前面两个小节构造了观测矩阵和稀疏字典矩阵,现需要用重构算法求解如下的优化问题:
min‖s‖0, s.t.y=Φx=ΦΨs,
(8)
式中,‖s‖0为s的零范数,即s中不为零值的个数。
为了求解此问题,可以将式(8)转化为式(9),这可以将零范数转化为l1范数问题,如下式所示
min‖s‖l, s.t.y=Φx=ΦΨs,
(9)
由A=ΦΨ可得
min‖s‖l, s.t.y=As。
(10)
1.3.2 改进OMP算法(IOMP)
‖x-y‖2≥‖x‖2-‖y‖2,
(11)
由式(10)、(11),可得
(12)

(13)
进一步在正交匹配追踪算法的基础上得到改进的正交匹配追踪算法。
推导出筛选判断条件后,在正交匹配追踪算法的基础上改进正交匹配追踪算法(IOMP),步骤如下:
输入:感知矩阵A,观测向量y,稀疏度K;
初始化:残差r0=y,角标集合B0=∅,列标集合A0=∅,循环次数t=1;
① 求n=max(abs〈AT,rt-1〉),n对应感知矩阵A的列为αt,对应其角标为λt;
② 更新角标集合Bt和列标集合At:Bt=Bt-1∪λt,At=At-1∪αt;

由改进的正交匹配追踪算法的迭代步骤,绘制出算法的流程图(图1)。

图1 IOMP流程
至此,基于压缩感知理论的振动信号修复模型完成建立。本文采用仿真信号与实测信号相结合的方法探究所提改进方法的效果。
2 仿真信号验证
如果数据丢失方式是单点随机丢失,采用正交匹配追踪法可以近乎完美地恢复出原始数据。但对于数据成段连续缺损的情况,文献[4]选择的损失比是10%,重构算法使用正交匹配追踪算法,可以将缺损信号修复,本文将原始信号的损失比提升到20%,研究信号成段连续缺失下的修复效果。
为了模拟滚动轴承振动信号[14]的真实工况,可以定义仿真信号进行数值模拟的仿真分析,如
x(t)=1.6sin(2πft1nT)×sin(2πft2nT)+3sin(2πft3nT)+n(t),
(14)
式中,采样间隔T=1/3 500 s,采样数n=1 000,组成x(t)的频率分量分别为ft1=20 Hz、ft2=2 000 Hz、ft3=80 Hz,n(t)是信噪比为2 dB的高斯白噪声。
该信号的波形如图2所示,首先利用稀疏DCT字典将信号稀疏化,得到系数向量如图3所示,计算得到该信号的稀疏度K=13,也可从图中明显看出仿真信号经过字典稀疏表示后,其稀疏度是比较低的,这非常利于信号的重构。

图2 原始信号 图3 稀疏表示系数向量
得到稀疏信号后,则需要模拟生成有损信号,其方法是:信号修复程序中设定采样点数在650~850
之间的数据全部置0,表明传感器因为故障、信号传输或线路接触不良而导致信号传输突然中断,在这段时间内的振动状态数据全部丢失,有损信号的时域波形如图4所示。

图4 有损仿真信号(损失比20%)

分别应用OMP和IOMP重构算法对有损信号进行修复(均选择DCT离散余弦变换作为稀疏域,损失比为20%),到两种方法的修复波形如图5、图6所示。

图5 OMP算法修复的信号波形 图6 IOMP算法修复的信号波形
从两幅修复波形图可以看出,其波形幅值只是在某些采样点有差异。为了比较仿真信号差异的精确值,根据式(8)所定义重构误差,可以计算出两种信号之间的绝对误差,如图7和图8所示,未改进算法的绝对误差限ε=5(即图7和图8中误差范围的绝对值) ,改进后的算法其绝对误差限ε=2,误差明显减小了很多。这表明IOMP方法对修复数值定义的有损信号是有效的。

图7 OMP算法修复的重构误差 图8 IOMP算法修复的重构误差
3 实测振动信号验证
旋转机械设备的运行状态复杂多变,这些设备的振动信号大多属于随机信号。这类信号的统计特性都随着时间变化而变化,因此处理这类信号必须采用数理统计的方法。
下面使用实测振动信号来检验数据修复理论模型的效果,试验中采用的实测信号来源于美国凯斯西储大学轴承实验中心(https://csegroups.case.edu/bearingdatacenter/pages/download-data-file),轴承型号为6205-2RS JEK SKF 深沟球轴承,采样频率为 12 kHz,转速为1 750 r/min,负载2 HP(1 HP=746 W)。
选取信号的前1 000个采样序列,实测信号的波形如图9所示,将其用DCT字典进行稀疏表示得到稀疏向量,得到该信号的稀疏度K=92,对比图10和图3可知实测信号的稀疏度明显比仿真信号的稀疏度高,这表明实测信号的修复难度大于数值定义的信号。

图9 实测振动信号波形图 图10 稀疏表示系数向量
首先将实测信号的损失比定为10%(即损失10%×1 000=100个数据),将采样点数为500~600之间的数据全部置为零,表明在这段时间振动状态数据丢失。原始与有损信号的波形如图11所示。分别使用采用OMP和IOMP对缺失信号进行修复,得到两种重构信号及其它们的重构误差如图12、图13,由图可知IOMP所修复信号的重构误差限减小了0.17,重构信号的时域波形也更接近原始信号。

(a) 原始信号 (b) 损失比10%的有损信号图11 原始信号和有损信号图

(a) OMP重构信号 (a) IOMP重构信号
其次将实测信号的损失比定为20%(即损失20%×1 000=200个数据),把采样点数为650~850之间的数据全部置为零,表明在这段时间振动状态数据丢失。原始与有损信号的波形如图14所示,然后分别使用OMP算法和IOMP对缺失信号进行修复,得到两种重构信号及其它们的重构误差如图15、图16。由图可知应用OMP算法,重构信号的重构误差限在±0.1之间;应用IOMP算法,其重构误差限在±0.02之间。显而易见,IOMP算法所得信号的重构误差较小。

(a) 原始信号 (b) 有损信号(损失比20%)图14 原始信号和有损信号(损失比20%)的对比图
为了从频域衡量振动信号的修复效果,并且计算信号的频域特征值。首先需要给出原始信号、有损信号、OMP重构信号、改进OMP重构信号这4种信号的功率谱图,如图17所示。由图17(a)、(b)比较可知有损信号的谱峰最高达不到0.25,有损信号的能量损失严重,这对后续信号处理会产生很大的影响;由图17(a)、(c)、(d)可知改进的OMP重构信号相比未改进OMP重构信号,无论是谱峰还是谱线分布均更接近原始信号的功率谱图,这说明改进OMP重构信号的修复效果比OMP重构信号好,也可说明使用改进OMP算法重构信号的特征信息更能逼近于原始信号。
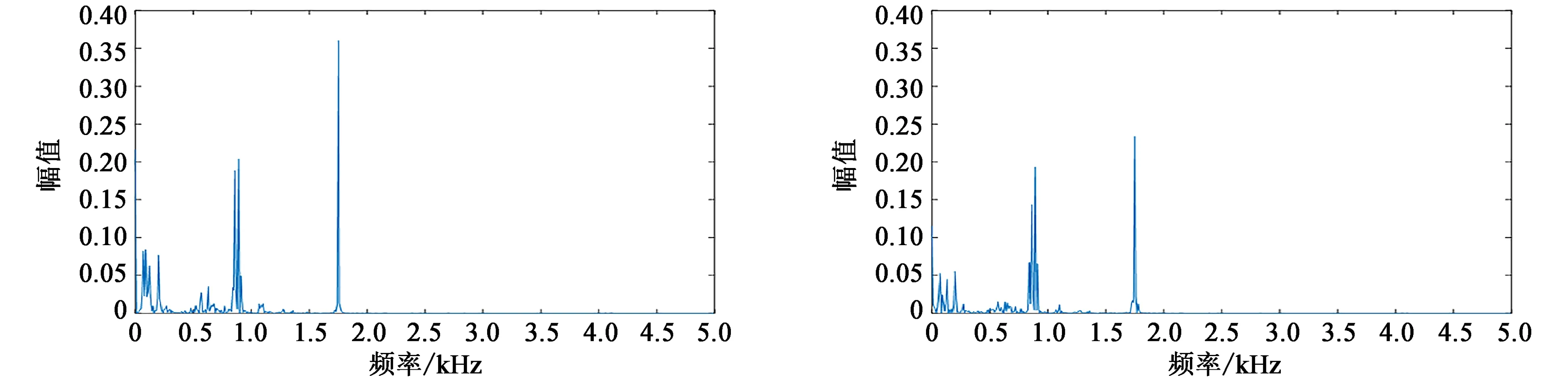
(a) 原始信号 (b) 有损信号(损失比20%)
4 定量比较分析
为了进一步验证IOMP算法的准确性,通过实际计算的数据进行比较。如果从统计特性的角度来比较两种算法的修复效果,则需要定义振动信号常用时频域特征值,主要包括均值、方根幅值、均方根值、方差、绝对平均值、峰值、峰峰值、裕度因子、峰值因子、波形因子、脉冲因子、偏度和峭度[15]等,根据计算公式可以求出原始信号、有损信号(选取损失比20%)、OMP算法重构信号、IOMP算法重构信号对应的时域特征值见表1,计算出频域特征值见表2。

表1 不同信号所对应的时域特征值

表2 不同信号所对应的频域特征值
为了定量对比修复重构后的信号和有损信号、原始信号之间的差异,将表1和表2中有损信号、OMP重构信号、IOMP重构信号的时域和频域特征值与原始信号的时域、频域特征值作差,得到时频域特征值的对比见表3和表4。

表3 时域特征值的定量对比表

表4 频域特征值的定量对比表
由表3可知除了T6、T7以外,其余的时域特征值都可以使用IOMP重构信号的计算结果;T6、T7则使用有损信号的时域特征值;由表4可知,除了F5、F7外,其余的频域特征值都可以使用IOMP重构信号的计算结果;F5、F7则使用OMP重构信号的频域特征值。这样即可保证所有特征值都能够尽可能地逼近原始信号特征值,才能更加准确的描述原始信号,满足振动信号后续处理所需要的统计特征。
5 结论
本文提出了基于改进的正交匹配追踪(IOMP)算法的振动信号修复方法,通过对仿真定义信号和美国西储大学轴承数据库实验中心的实测振动信号的分析,得到以下结论。
1)对于仿真信号来讲,经过稀疏表示后,信号的稀疏性能较好,修复的误差也较低。改进后的算法与未改进的算法相比较来说,改进之后修复信号的绝对误差限由ε=5降低到ε=2。也验证了所提方法的有效性,提高了缺损信号的修复精度及运算效率。
2) 对于实测信号来讲,采集信号的过程这不可避免会引入噪声,而噪声不具有稀疏性,对实测信号的稀疏表示会有影响。尽管不能在时频域内准确恢复出每个数据,但可以改善信号的时频域特征值,本文将数据连续缺失的比例提升到20%,对缺失信号进行重构后,其修复效果较好,能够更为准确地描述原始信号。
