机器视觉技术在我国农业领域内的应用分析
2023-08-27田鹏菲王皞阳
田鹏菲 王皞阳

摘要:机器视觉技术在我国打造高水平农业的道路上扮演了重要角色。为帮助相关研究人员整体了解我国农业领域内机器视觉技术的应用情况,把握其研究方向,以中国知网为文献数据来源,通过文献解读,结合文献计量学和知识图谱可视化软件,系统分析机器视觉技术在我国农业中的应用情况,并提出现有的研究弱势和未来的发展趋势。结果表明,机器视觉技术在我国农业领域内的发展大致可以分为3个阶段,研究数量整体呈现上升趋势,应用方向可以分为视觉导航、无损检测、精确定位、病虫害识别、长势监测、目标识别或判断、信息采集或测算,研究重点为导航、农业机械、识别、算法、无损检测、图像处理,未来的研究方向为高精度智能化视觉系统的研发。
关键词:機器视觉技术;农业;文献计量分析;知识图谱;研究数量;应用方向;研究重点;研究方向;突发词
中图分类号:TP391.41;S126文献标志码:A
文章编号:1002-1302(2023)14-0013-09
机器视觉广泛应用于我国农业领域内的多个生产环节,具有精度高、效率高、适用广的优点。从最初的植物品种识别发展至今,已经成为从考种、种植、采收,再到后期分级加工乃至贯穿整个农业生产环节的成熟技术,在种植业以外的其他涉农行业也有应用,对提高作业精度、节约劳动力、带动产业升级、推动农机信息化和智能化等具有重要意义,为我国农业发展作出了重要贡献。目前,我国正处于由传统农业迈向现代农业的过渡期,机器视觉作为农业机械的“眼睛”,在近几年得到了飞速发展,极大地提高了生产效率和农机自动化水平。把握好该技术在我国农业领域内的研究现状和热点,对补足我国农业中机器视觉技术的弱势、明确未来视觉技术的发展趋势具有重要的参考价值。
1 文献数据来源及分析方法
1.1 文献数据来源
文献数据为收录在中国知网的核心、EI及SCI论文,发表截至时间为2021年12月31日,检索时间为2022年8月1日,运用中国知网专业检索功能,使用表1检索式逐次进行检索后,再汇总、去重、去除相关度不高或综述性的论文,以筛选后的 503篇论文作为分析对象。
1.2 文献分析方法
运用CiteSpace对文献数据进行文献计量学中的年度分布分析、关键词分析及知识图谱绘制,通过人工阅读筛选进行文献研究内容分类,借助Excel进行统计数据的图表绘制。
2 发展情况简析
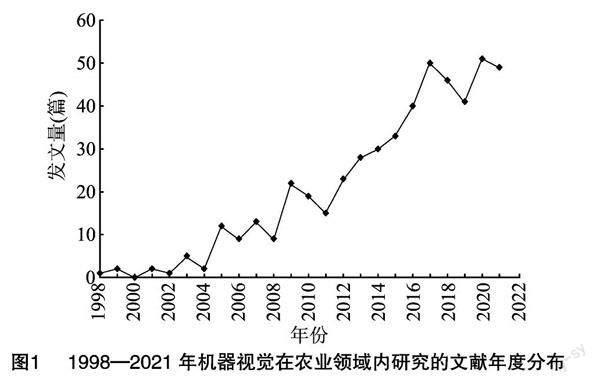
由图1可知,机器视觉在我国农业领域内的相关研究发文数量整体呈现上升趋势,局部具有微小波动。按照发文数量将机器视觉在我国农业领域内的发展大致分为以下3个阶段。
第一阶段为1998—2008年,此阶段每年的发文数量较少,共计发文56篇,该阶段称为萌芽期。机器视觉作为一种农业新技术,在该阶段的相关研究多以算法的实现为主,受制于计算机低算力和图像采集系统的低分辨率,该阶段的研究成果很难支撑起快速准确的在线检测或数据处理,整体分析精度不高,以通过静态图片进行算法研究为主,实用性不强。此外,在人工阅读筛选和分析文献时,发现该阶段的论文有许多都是介绍国外研究成果的科普性综述,其数量在某些年份甚至多过研究性论文,说明该阶段国内农业领域对机器视觉的研究及应用远不如国外,我国视觉技术起步较晚、应用于农业的程度较低的劣势在该阶段非常明显。
第二阶段为2009—2015年,此阶段的发文数量逐步上升,共计发文170篇,此阶段称为视觉技术的成长期。经过一段时间的发展和研究,机器视觉技术已经在农业生产中有了一定的应用,虽然也是以算法的实现为主,但此阶段中有不少以解决实际需求为出发点、以算法与农业机械的结合为目的进行研究,精度和处理速度的提升也使得机器视觉在农业生产中的实用性得到增强。
第三阶段为2016—2021年,此阶段发文数量较多,共计发文277篇,该阶段称为成熟期。此阶段机器视觉在农业中的应用愈发广泛,技术也愈发成熟,以优化算法增强实用性的研究逐渐增多。依托于网络技术和计算机算力的进步,机器视觉技术正在由“帮助机器看到”向“帮助机器思考”发展,深度学习等方法的引入使得机器视觉在农业中的应用越来越接近智能化,算法的鲁棒性也越来越高。
综上,我国农业领域内的机器视觉技术发展可以简单总结为从无到有、从有到实用、从实用向智能发展3个过程。
3 应用方向归类
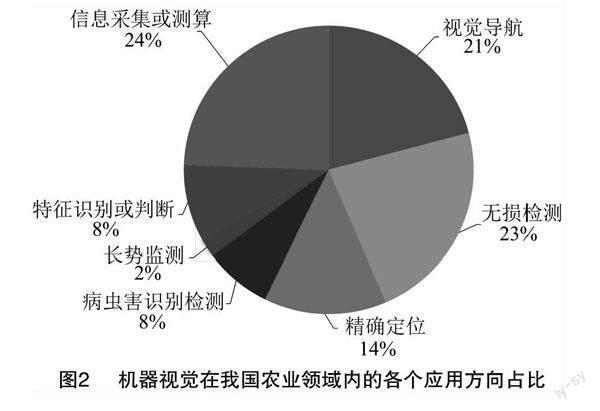
通过阅读分析,可以将机器视觉在我国农业领域内的应用分为视觉导航、无损检测、精确定位、病虫害识别检测、长势监测、特征识别或判断、信息采集或测算7个方向。
分类原则以相关论文研究内容的终端应用目的为准,如倪江楠等基于光学导航的采摘机器人系统设计及定位方法研究[1],虽然题目中包含“导航”,研究中有果实的识别内容,但是其研究的应用目的是帮助采摘机器人更好地定位果实所在位置。因此,该论文的应用方向归类为精确定位。其他论文均以此准则进行归类,各应用方向的发文比例如图2所示,具体数量分布如表2所示。
4 各应用方向的研究情况简析
4.1 视觉导航
视觉导航的研究目标大致可以分为2类,一类为帮助农业装备进行路径规划,从而实现作业线路导航或无人驾驶作业;另一类为辅助农业装备避障或避开农作物。作为自主导航农机的重要组成部分,机器视觉可以通过识别作物行[2-3]、道路[4-5]、地头线[6]、根茬[7-8]、障碍物[9-10]等完成导航。
视觉导航是机器视觉在我国农业中最早的应用方向之一,1998年,王丰元等根据霍夫(Hough)变换设计出一种直线检测方法,这是本研究检索的文献数据中最早关于机器视觉在导航中的应用研究[11]。当时视觉导航技术还未在我国农业中投入使用,相关研究仅限于算法研究与可行性分析。经过多年发展,具有自主导航功能的农业机械越来越多地应用于农业生产中,相关研究涉及田间作业导航[12-13]、收获[14]、运输[15]等多个方面。
机器视觉导航共有3种应用途径,一是独立视觉导航,即仅通过机器视觉对农业机械进行导航;二是视觉辅助导航,即作为全球导航卫星系统(GNSS)导航受到干扰时的临时辅助导航;三是联合导航,即使用机器视觉、GNSS、超声波或其他传感器进行联合导航,常见的视觉导航典型结构见图3。
独立视觉导航的相关研究多应用于农机在农田内的行走路径导航,利用机器视觉进行路径规划。关卓怀等经过畸变矫正、高斯滤波、2R-G-B超红特征模型的图像二值化割、二值图像形态学开-闭运算、抑制噪声等流程实现了4种光线环境下水稻收获作业路径提取[16];王侨等依据农田内外像素灰度跳变特征判断地头是否出现,经过平滑处理、建立按序离群度参数、确定跳变特征点的像素坐标等流程获得农机所在地头安全转向掉头的边界线[17]。
视觉辅助导航的相关研究多应用于自主性较强,但作业环境可能短暂失去GNSS信号的无人驾驶设备。张振乾等使用型号为ZED双目相机采集图像,通过点云获取和实时三维重建,结合改进 K-means 聚类方法实现巡检机器人在香蕉园内的路径提取[18];田光兆等使用BBX3三目相机采集图像,并实现自主导航拖拉机短时离开卫星定位时的运动轨迹预测[19]。
联合导航的相关研究主要应用于智能农机或可以无人监管的自主行驶农业设备。李云伍等采用差分全球导航定位系统(RTK-GNSS)进行路网信息采集、实时定位和路径规划,利用机器视觉进行田间道路识别和路径跟踪线提取,研制出丘陵山区田间道路自主转运车的导航系统,在3种不同路况下均有较小的行驶误差,可以满足转运车自主行驶的安全要求[20];王东等利用GNSS导航进行无人机果园作业的行间切换,利用机器视觉进行果树识别并实现无人机轨迹控制,研发出一种适用于山地果园且精度较高的无人机轨迹控制系统[21]。
总体而言,视觉导航技术已经较成熟,在我国农业中应用广泛,近年来,以增加智能程度和提高精度为目的展开的研究日益增多。未来的研究倾向于机器视觉与GNSS等技术结合的高精度、高自主性导航设备研发,如2022年9月3日,在广西壮族自治区柳州市举办的“‘科创中国丘陵山区智能农机装备高质量发展研讨会”上,罗锡文院士展示的水稻无人农场内的自主导航作业机械,既具有自主识别作业路径、作业目标的功能,还可以与配套农机协同作业、自主入库。此类智能农机如何投入更多种农作物的生产中,是未来几年视觉导航的研究重点。
4.2 无损检测
机器视觉无损检测技术在我国农业中的应用主要有2种,一是机器视觉考种,使用机器视觉检测种子或种苗,判断种子或种苗活力;二是机器视觉对果蔬进行无损检测分级(图4)。
机器视觉考种具有无损、快速、低成本、无污染、无主观影响的优点。张晗等将1 200粒正常种子、1 200粒霉变种子、1 200粒破损种子作为图像采集样本,使用HALCON软件提取种子的18个颜色和12个形态特征,建立相关检测模型,实现了较高准确率的玉米种子分选试验结构[22];张秀花等对YOLOv3-Tiny卷积神经网络的目标检测模型进行改进,实现了番茄穴盘苗内无苗、弱苗、壮苗穴盘识别分级,在重合阈值为50%的条件下平均精度达到97.64%,且单张图像的处理时间为 5.03 ms,相比于人工乃至其他目标检测算法均有优势,对种苗检测具有重要参考价值[23]。
机器视觉无损检测分级可以通过对尺寸、颜色、缺陷情况等指标综合考量后进行果蔬自动分级,在大量、多指标的农产品分级任务中相比于人工或其他物理分级系统具有无主观影响、能综合指标分级的明显优势。王风云等提出基于分水岭、Canny算子、闭运算等处理的双孢蘑菇图像大小分级算法,同时开发出相关分析与控制软件、研发出样机,该研究在输送速度为12.7 m/min、相机行频为 1 900 Hz 下,具有97.42%的平均准确率[24];向阳等探究一种基于迁移学习的芒果双面成熟度在线检测分级系统,通过获取、合并、预处理芒果上下两面的图像,以颜色信息为分级依据,利用卷积神经网络模型对芒果成熟度进行分级,试验中该模型的平均准确率达到96.72%,单个样品检测耗时 0.16 s,具有实用价值[25]。
无论是机器视觉考种还是果蔬等农产品分级,都需要针对不同作业目标的不同评级标准进行算法训练,因此很难形成具有普遍适用性的无损检测系统。随着处理器人工智能(AI)算力的进步,识别训练可以利用网络大数据进行,对各类缺陷进行特征归类、建立检测系统框架和数据库,以此改变必须对待测物及缺陷先进行特定训练才能视觉无损检测的现状,进而实现更高效的无损检测系统的开发。
4.3 精确定位
基于机器视觉的精确定位在我国农业中的应用[CM(21]主要有2种,一是采摘机械作业时需要的果蔬空间位置定位,二是植保作業时植保机械对作业目标的精确对靶。利用机器视觉进行精确定位的研究是随着农业机器人的发展而兴起的,其作业时的底层原理是目标识别。在采摘作业中精确定位时,机器视觉需要识别待采摘果蔬的特征,分辨果蔬所在的空间位置,并尽可能去除枝叶干扰,判断果蔬距离。陈军等利用HSV颜色模型,通过分割红色区域的方法识别成熟草莓,利用测距模块保持机器与种植垄的距离恒定,设计出配套执行部件并实现成熟草莓的识别与精确定位,在试验条件下具有90%的无伤采摘成功率[26];郑如新等通过图像采集、噪音消除、RGB和HSV颜色分割、Canny算法边缘检测等流程实现了金银花的识别,改进后的识别率为93.75%,可以满足金银花采摘机器人实时作业要求[27]。
在植保作业精确定位时,机器视觉需要通过识别杂草、作物或作物行等目标实现精准控制对靶,从而达到精确施肥、喷药或避苗作业的目的。韩长杰等通过改进超绿算法(ExG算法)提取颜色信息,提出甘蓝作物行与多作物行自适应感兴趣区域(ROI)提取方法,并设计基于PID轨迹追踪算法的对行喷雾控制系统,在田间试验中对行准确率达到93.33%,对行偏差在 1.54 cm 以内,可以满足田间作业需求[28];宗泽等利用颜色特征识别玉米株心,使用切片式排肥器进行间歇排肥,建立施肥滞后误差补偿模型,进而实现准确的玉米按株定位定量施肥,施肥位置误差平均为3.2 cm,可以满足科学施肥、减少化肥浪费的目的[29]。
目前,我国利用机器视觉精确定位的相关研究多具有针对性,可识别作业目标较少,通常在植物保护技术作业中的实际应用较多。未来可以通过结合激光测距、超声波测障、TOF镜头深度测量等技术手段实现更高精度的定位。
4.4 病虫害识别检测
机器视觉可以帮助种植人员更快更好地识别病虫害类型,评估病虫害受灾情况,从而制定恰当的应对措施。早期利用机器视觉实现的病虫害识别主要利用简单的形状逻辑判断,而后发展到基于特征向量的模式识别,如今随着深度学习的发展,卷积神经网络及其改进算法的引入大幅提高了识别率[30]。李就好等提出一种基于改进的更快速区域卷积神经网络(Faster R-CNN)的苦瓜叶部病害目标检测方法,经过图像采集、深度学习模型训练、图像随机处理、融入特征金字塔网络等流程,建立识别苦瓜健康叶片、白粉病、灰斑病、蔓枯病、斑点病且具有良好鲁棒性的检测模型[31];党满意等利用RGB、HSV颜色空间中马铃薯叶片的颜色变化建立晚疫病无病和患病模型,并用熵值和能量值描述病情的严重程度,相比于传统理化值检测法可以节约大量时间[32];张哲宇等利用改进YOLOv3和DBTNet-101双层网络建立稻纵卷叶螟检测模型,配合相关硬件设施搭建基于深度学习的机器视觉稻纵卷叶螟性诱智能监测系统,实现稻纵卷叶螟成虫的实时自动检测,精确率达到97.6%[33]。
虽然利用机器视觉识别病虫害的研究随着向量机、深度学习等算法的引入及优化变得越发稳定和成熟,但是由于病虫害种类繁多,且各类病虫害的可视化表征可能相似或重叠,导致目前机器视觉识别病虫害之前必须进行大量针对性训练。开发一个可以识别大量病虫害种类、评估受灾情况的系统任重而道远。未来该技术的研究可以向普适性识别和提供意见结合的方向发展,先从病虫害数据库建立着手,经过长期的图像采集和特征提取,制定统一病虫害严重情况评判标准,而后引入专家应对意见,实现识别、防治双功能。
4.5 长势监测
对农作物进行长势监测是精准农业的重要组成部分,通过视觉系统获取作物生长状况、环境因素等数据,有利于田间管理者做出决策建议,可以更加精准地进行水肥配给。建立长势与收获相关模型,可以通过长势监测数据进行产量预估。
传统的长势监测系统常见于设施农业中,多利用较固定的监测点在一定区域内进行长期监测,从而获得完整生长周期内的长势与环境相关度信息,具有较高的稳定性和数据预测准确度。李云霞等对2017—2019年连续2个生长季的冬小麦进行多次图像采集,分别构建苗期冠层和开花期麦穗数据集,利用RGB图像和深度学习完成冬小麦长势参数模块和麦穗计数模块的搭建,可以满足冬小麦田间长势参数估算需求[34]。相比于传统长势监测系统,利用无人机进行长势监测具有覆盖范围大、灵活、机动性好、作业效率高、布局成本低的优点。宁川等利用无人机搭载数码相机采集油菜图像,经过对图像进行预处理和色度(HIS)色彩空间灰度化、阈值分割等流程,最终实现了以色度(H)分量值为特征参数的油菜长势评价系统,为油菜长势调查和产量预测提供依据[35]。
从长势监测系统的实际应用经验来看,结合多种传感器、环境可控的设施农业内部具有最好的长势监测条件,大田应用场景中很难满足精细布局和光线调控的需要,利用无人机进行长势监测是大田作业要求下的发展趋势。为了避免明暗干扰,未来可以尝试在夜间进行基于红外线或多光谱结合的机器视觉长势监测。
4.6 特征识别或判断
机器视觉进行特征识别或判断的技术最常见于人脸识别、拍照识图等场景,在农业领域内的目标识别或判断多用于利用机器视觉进行种植业内的植物品种或类型识别、养殖业内的动物个体身份或行为识别,乃至通过特征识别判断植物是否可食用或有价值、动物是否需要调整养殖条件。
种植业中的农作物种类繁多,传统植物识别方法需要工作人员具备扎实的植物形态学知识,机器视觉可以依据花、果实、枝叶等器官的形态、纹理、颜色等特征对植物进行识别分类。温长吉等以多个植物图像数据库的照片为试验数据集,引入并改进稠密胶囊网络模型进行花卉和叶片等植物器官的识别,通过增加前景待识别区域的特征权值降低背景干扰,实现了图片尺寸为32像素×32像素时77.2%、图片尺寸为227像素×227像素时95.1%的平均识别准确率[36];林楠等利用Retinex算法增强图像,通过中值滤波进行图像去噪预处理,以改进HSV色彩空间进行识别,实现野生菌的快速有效识别[37]。
养殖业内对动物个体进行身份识别是智能化養殖中实现精准监测与溯源的重要手段之一,对动物行为进行识别是养殖人员判断动物身体状况与诉求、保证动物福利的重要依据。谢秋菊等建立改进的融合注意力机制的密集卷积网络(DenseNet-CBAM)模型对猪脸进行识别,通过嵌入密集卷积网络(CBAM)注意力模块加强猪脸关键特征的提取,并实现猪脸图像分类,猪脸识别准确率达到99.25%[38];王少华等使用改进的高斯混合模型进行运动奶牛目标检测,通过色彩及纹理信息去除干扰背景,再利用AlexNet深度学习网络训练奶牛行为分类网络模型,识别奶牛爬跨行为,实现100%的奶牛发情行为自动识别[39]。
随着智能手机的发展,图像识别技术的普及度越来越高,但是农业中真正成熟的目标识别判断系统依然稀缺。农业领域内图像识别的难点,主要是需要识别的物体种类和难以归类处理的特征太多。建立一套识别系统需要大量的数据,如果要进行植物种类识别,首先要有大量的植物图像可供系统训练,其次要对各类相似植物的细微差异进行区分,最后还要通过不同角度、不同光照环境适应性练习保证贴近实际应用场景;如果要对某种动物进行个体识别,则需要对该动物较固定的形貌特征进行提取,并长期对该特征进行跟踪和对比,得出该特征随时间延长而发生变化的函数,通过多次预测和修正减少动物成长带来的干扰。总之,精准精确的目标识别判断在我国农业内大量应用还有很长的一段路要走。
4.7 信息采集或测算
农业生产中通过机器视觉进行信息采集或测算具有非接触、准确率高、速度快、节约劳动力的优点,因此在农田技术指标采集、农产品质量评价、动物发育状况考评等方面具有大量的应用与研究[40]。
某些农田指标的采集需要耗费大量劳动力,同时作业效率低,利用视觉技术可以在成本较低且不改变农田待测指标的情况下完成信息采集。安晓飞等利用K-means聚类算法从背景中分离秸秆图像,分区寻优,再通过对秸秆像素点数量的计算获得田地里玉米秸秆的覆盖率,经过验证,该方法与人工拉绳法和人工图像标记法均有较高的相关系数,误判率为7%,能够在不同条件下代替人工进行秸秆覆盖率计算[41]。
农产品质量评价对农产品价格评估具有重要参考价值,许多传统评价方法具有工序繁杂费时、主观因素影响大、评价指标易浮动的缺点,机器视觉的大量应用,使得快速采集农产品优劣信息进行农产品质量评价成为现实。万龙等采用RGB双面成像方法获取籽棉样本图像,通过分析图像内杂质面积预测已去除大杂的籽棉含杂率和小杂质量,最后结合大小杂质数据预测样本总含杂率,结果表明该系统具有较高的准确率,同时比人工检测有更高的效率[42]。
动物的生长发育状况常通过动物体尺、体质量、体态等指标进行考评,传统的测量方法常需要人工作业,效率低且具有安全隐患,利用机器视觉进行无接触测量具有安全高效的优点。司永胜等利用Kinect相机获取的视频数据对长白猪和大白猪进行猪体姿态检测和体尺测量,利用最小外接矩形法调整猪体为水平方向,利用投影法和差分法识别猪体的头、尾位置,通过头部边界标记法判断耳部是否缺失,再通过骨骼化算法结合霍夫变换检测猪体头部是否歪斜,进而进行体尺测量,该算法对猪体宽、高、长的平均测量精度分别为95.5%、96.3%、97.3%,准确率较高,对实现无接触猪体尺测量具有参考价值[43]。
非接触式信息采集或测算是未来农业信息化发展的重要组成部分。受新冠疫情影响,近2年非接触测量变得越来越常见,在农业中的应用也层出不穷。除了非接触外,机器视觉相较于人眼或传统物理信息采测方法具有更高的分辨能力、数据量化能力和环境适应能力。近年来相关研究的目的主要是代替原有落后或低效信息的采测方法,提高作业效率,预计未来几年基于机器视觉的信息采集或测算系统会淘汰更多传统人力信息采集或测算方法。
5 研究重点及趋势分析
5.1 關键词共现分析
关键词一定程度上反映某一领域的研究重点,结合具体应用情况可以推断各研究的热度走向。对1998—2021年所有农业领域的机器视觉相关文献进行关键词共现分析,除去“机器视觉”后的关键词共现图谱见图5。
由图5可知,机器视觉在我国农业中的研究重点主要有6点。第一,导航。视觉导航随着智能农机、自动驾驶等技术的发展越发成熟,预计未来几年会达到研究热度的顶峰,而后成为成熟技术,在大规模应用于农业机械时研究热度会逐渐下降。第二,农业机械。该关键词的出现意味着我国农业领域内的机器视觉研究中有一大部分是为农业机械服务的,其研究目的是帮助农业机械实现导航、采摘、植物保护等作业,侧面证明机器视觉在我国农业中的实际应用较多,由于我国农业机械发展情况向好,所以将机器视觉应用于农业机械的研究大概率会继续维持热度,直至智能农机较成熟。第三,识别。识别是机器视觉得以完成许多作业的前提,由关键词共现图谱可知,识别的研究与其他研究重点联系密切,处于中介地位,由于绝大多数机器视觉作业都需要先识别作业目标,所以可以预见识别相关的研究热度会较稳定地持续下去。第四,算法。算法是图像采集系统、数据存储系统、终端执行系统等硬件设施得以进行作业的灵魂,机器视觉在我国农业中的相关研究均需要算法设计、算法优化的支撑展开,除硬件设计外的相关研究一般均涉及算法,所以机器视觉的研究中算法会始终占有一席之地。第五,无损检测。作为机器视觉在农业中的重要应用方向,无损检测相关研究具有持续且较高的热度,由于各种农作物或种子的检测及考评指标不同,相关研究应该还需要很长时间才能达到饱和。第六,图像处理。图像处理是视觉系统得以看清RIO区域的重要流程,此类研究主要是为了帮助机器视觉提高抗干扰能力展开的,包括但不限于不同光照条件、不同遮挡情况等干扰下的图像增强或优化,为了保证作业精度,图像处理的相关研究应该会始终维持一定的研究热度。
5.2 突发词探测分析
使用CiteSpace对关键词进行突发性(burstness)探测,得到的突发词在一定程度上可以反映出某一阶段的研究倾向,最新的突发词对未来的发展趋势具有参考价值。对数据库内2011—2021年的文献进行突发性探测,结果见图6。
从突发词强度(strength)和时间持续情况来看,深度学习极有可能成为机器视觉在算法研究中的主流方法,其原因与智能农机、无人农场及农业机器人的发展关系密切。深度学习在机器视觉中应用的目的是帮助视觉系统提高精度和学习,最终达到帮助视觉系统思考、实现机器视觉智能化。目前最常见的应用于机器视觉的深度学习方法为卷积神经网络(CNN)及其优化算法,彭文等利用深度卷积神经网络建立精度较高的水稻田杂草识别模型[44];张乐等利用改进的更快速区域卷积神经网络(Faster R-CNN)实现了高精度的油菜田杂草识别[45]。
从突发词还可以看出,机器视觉在农业无人机中的应用有较大概率在未来几年继续保持不错的发展趋势,无人机在精准喷药[46]、田间信息采集[47]等作业中具有灵活、高效的优势。开发更多搭载于无人机的视觉功能,对实现高机动性信息化农业具有巨大帮助。
6 结论
机器视觉在我国农业领域内的应用范围广泛,为我国农业走向机械化、信息化乃至智能化起到重要作用。目前,机器视觉在我国农业中有7个应用方向和6个研究重点,虽然各项技术已经趋于成熟,但是碍于农业领域内数据量庞大、机器视觉的智能程度不高,所以不少带有视觉系统的农业机械仍处于试验推广阶段。
近几年机器视觉在我国农业中的研究越发偏向于智能化,“如何让机器视觉帮助农业机械思考”是未来几年的研究重点。深度学习是提高视觉系统精度、实现多种视觉功能的有效途径。虽然基于深度学习的机器视觉作业算法已经很常见,但是还不算成熟,多用于提高精度。此外,机器视觉在农业无人机中的应用也具有较高的研究价值。
总体而言,我国农业领域对机器视觉的应用较成功,未来可以参考各类无人农场的模式,将机器视觉与其他传感器进行技术融合,进而实现更多作物、更高精度的全程机械化。
参考文献:
[1]倪江楠,石新龙.基于光学导航的采摘机器人系统设计及定位方法研究[J]. 农机化研究,2021,43(3):221-225.
[2]杨 洋,张博立,查家翼,等. 玉米行间导航线实时提取[J]. 农业工程学报,2020,36(12):162-171.
[3]马志艳,汤有胜,杨光友.基于视觉的茶作物行间行走路径规划研究[J]. 农机化研究,2017,39(1):202-206.
[4]李云伍,徐俊杰,王铭枫,等. 丘陵山区田间道路自主行驶转运车及其视觉导航系统研制[J]. 农业工程学报,2019,35(1):52-61.
[5]陈玉楼.自主行走拖拉机道路识别与路径导航——基于激光扫描测距[J]. 农机化研究,2018,40(9):227-231.
[6]乔榆杰,杨鹏树,孟志军,等. 面向自动驾驶农机的农田地头边界线检测系统[J]. 农机化研究,2022,44(11):24-30.
[7]王春雷,卢彩云,李洪文,等. 基于支持向量机的玉米根茬行图像分割[J]. 农业工程学报,2021,37(16):117-126.
[8]李景彬,杨禹锟,温宝琴,等. 基于根茬检测的秋后残膜回收导航路径提取方法[J]. 吉林大学学报(工学版),2021,51(4):1528-1539.
[9]吴春玉.农用四轴飞行器避障控制系统设计——基于机器视觉和超声波测距[J]. 农机化研究,2022,44(4):110-114.
[10]姬长英,沈子尧,顾宝兴,等. 基于点云图的农业导航中障碍物检测方法[J]. 农业工程学报,2015,31(7):173-179.
[11]王丰元,周一鸣,孙壮志.车輛引导路线检测的计算机视觉技术初探[J]. 农业机械学报,1998,29(1):1-5.
[12]谭文豪,桑永英,胡敏英,等. 基于机器视觉的高地隙喷雾机自动导航系统设计[J]. 农机化研究,2022,44(1):130-136.
[13]张 漫,项 明,魏 爽,等. 玉米中耕除草复合导航系统设计与试验[J]. 农业机械学报,2015,46(增刊1):8-14.
[14]胡丹丹,殷 欢.基于机器视觉的玉米收获机器人路径识别[J]. 农机化研究,2017,39(12):190-194.
[15]邓明华.基于GSM嵌入式物流监控的农业自主导航车辆设计[J]. 农机化研究,2017,39(2):237-241.
[16]关卓怀,陈科尹,丁幼春,等. 水稻收获作业视觉导航路径提取方法[J]. 农业机械学报,2020,51(1):19-28.
[17]王 侨,刘 卉,杨鹏树,等. 基于机器视觉的农田地头边界线检测方法[J]. 农业机械学报,2020,51(5):18-27.
[18]张振乾,李世超,李晨阳,等. 基于双目视觉的香蕉园巡检机器人导航路径提取方法[J]. 农业工程学报,2021,37(21):9-15.
[19]田光兆,顾宝兴,Mari I A,等. 基于三目视觉的自主导航拖拉机行驶轨迹预测方法及试验[J]. 农业工程学报,2018,34(19):40-45.
[20]李云伍,徐俊杰,王铭枫,等. 丘陵山区田间道路自主行驶转运车及其视觉导航系统研制[J]. 农业工程学报,2019,35(1):52-61.
[21]王 东,范叶满,薛金儒,等. 基于GNSS与视觉融合的山地果园无人机航迹控制[J]. 农业机械学报,2019,50(4):20-28.
[22]张 晗,闫 宁,吴旭东,等. 在线式玉米单粒种子检测分选装置设计与试验[J]. 农业机械学报,2022,53(6):159-166.
[23]张秀花,静茂凯,袁永伟,等. 基于改进YOLOv3-Tiny的番茄苗分级检测[J]. 农业工程学报,2022,38(1):221-229.
[24]王风云,封文杰,郑纪业,等. 基于机器视觉的双孢蘑菇在线自动分级系统设计与试验[J]. 农业工程学报,2018,34(7):256-263.
[25]向 阳,林洁雯,李亚军,等. 芒果双面成熟度在线检测分级系统[J]. 农业工程学报,2019,35(10):259-266.
[26]陈 军,张继耀,张 欣.基于机器视觉的草莓自动采摘机的设计[J]. 农机化研究,2020,42(2):141-145.
[27]郑如新,孙青云,肖国栋.基于机器视觉的金银花图像识别处理算法研究[J]. 中国农机化学报,2022,43(4):153-159.
[28]韩长杰,郑 康,赵学观,等. 大田甘蓝作物行识别与对行喷雾控制系统设计与试验[J]. 农业机械学报,2022,53(6):89-101.
[29]宗 泽,刘 刚.基于机器视觉的玉米定位施肥控制系统设计与试验[J]. 农业机械学报,2021,52(增刊1):66-73.
[30]杨 涛,李晓晓.机器视觉技术在现代农业生产中的研究进展[J]. 中国农机化学报,2021,42(3):171-181.
[31]李就好,林乐坚,田 凯,等. 改进Faster R-CNN的田间苦瓜叶部病害检测[J]. 农业工程学报,2020,36(12):179-185.
[32]党满意,孟庆魁,谷 芳,等. 基于机器视觉的马铃薯晚疫病快速识别[J]. 农业工程学报,2020,36(2):193-200.
[33]张哲宇,孙果镓,杨保军,等. 基于机器视觉和深度学习的稻纵卷叶螟性诱智能监测系统[J]. 昆虫学报,2022,65(8):1045-1055.
[34]李云霞,马浚诚,刘红杰,等. 基于RGB图像与深度学习的冬小麦田间长势参数估算系统[J]. 农业工程学报,2021,37(24):189-198.
[35]宁 川,赵庆展,韩 峰.基于机器视觉的无人机油菜长势调查研究[J]. 农机化研究,2020,42(1):265-268.
[36]温长吉,娄 月,张笑然,等. 基于改进稠密胶囊网络模型的植物识别方法[J]. 农业工程学报,2020,36(8):143-155.
[37]林 楠,王 娜,李卓识,等. 基于机器视觉的野生食用菌特征提取识别研究[J]. 中国农机化学报,2020,41(5):111-119.
[38]谢秋菊,吴梦茹,包 军,等. 融合注意力机制的个体猪脸识别[J]. 农业工程学报,2022,38(7):180-188.
[39]王少华,何东健,刘 冬.基于机器视觉的奶牛发情行为自动识别方法[J]. 农业机械学报,2020,51(4):241-249.
[40]吴旭东,张 晗,罗 斌,等. 基于机器视觉的小麦种子活力检测方法[J]. 江苏农业科学,2021,49(24):189-194.
[41]安晓飞,王 培,罗长海,等. 基于K-means聚类和分区寻优的秸秆覆盖率计算方法[J]. 农业机械学报,2021,52(10):84-89.
[42]万 龙,庞宇杰,张若宇,等. 機采籽棉收购环节含杂率快速检测系统研制[J]. 农业工程学报,2021,37(6):182-189.
[43]司永胜,安露露,刘 刚,等. 基于Kinect相机的猪体理想姿态检测与体尺测量[J]. 农业机械学报,2019,50(1):58-65.
[44]彭 文,兰玉彬,岳学军,等. 基于深度卷积神经网络的水稻田杂草识别研究[J]. 华南农业大学学报,2020,41(6):75-81.
[45]张 乐,金 秀,傅雷扬,等. 基于Faster R-CNN深度网络的油菜田间杂草识别方法[J]. 激光与光电子学进展,2020,57(2):304-312.
[46]胡志伟,杨 华,娄甜田,等. 基于全卷积网络的生猪轮廓提取[J]. 华南农业大学学报,2018,39(6):111-119.
[47]许真珠,黄 莺. 基于无人机技术的水稻精准喷药系统研究[J]. 农机化研究,2019,41(2):238-241,247.
收稿日期:2022-09-30
基金项目:国家自然科学基金(编号:31960503)。
作者简介:田鹏菲(1999—),女,山东聊城人,硕士研究生,主要从事农业信息化研究。E-mail:1807588926@qq.com。
通信作者:王皞阳(1999—),男,甘肃天水人,硕士研究生,主要从事生物质资源化利用研究。E-mail:2029278614@qq.com。
