基于无人机摄影的森林火情早期探测系统
2023-08-25谢振
谢 振
(铜陵市消防救援支队,安徽 铜陵 244400)
森林主要的灾害是火灾,当森林发生火灾时,不仅会降低林木与动物的生存概率,还会威胁人们的生命安全,严重破坏森林生态环境[1-3]。同时,森林火灾的控制难度也较高,因而需要及时发现森林早期火情,发出报警信息,避免火灾破坏面积继续扩大[4]。为此,设计森林火情早期探测系统,可降低火灾对森林的影响[5]。例如,王利军等(2022)通过温度传感器监测森林温度信息,利用温度识别算法与预警温度阈值,完成森林火情早期探测。该系统的火情早期探测响应时间低于5 s,可有效防止火情漏报问题,具备较优的森林火情早期探测效果[6]。肖云丹等(2021)依据贝叶斯-零膨胀负二项模型设计森林火情早期探测系统,利用贝叶斯法探测森林火情早期发生概率,通过零膨胀负二项模型分析森林火情与气象因子间的关系,为避免森林火情发生提供参考。该系统具备较优的森林火情早期探测可靠性[7]。但上述系统的森林火情早期探测范围较小,无法全面预防森林火情。无人机摄影技术是利用无人机搭载不同类型的传感器,采集森林相关信息,并依据采集的信息进行森林火情早期探测。利用无人机的高机动性,可扩展森林火情早期探测范围,提高探测效率[8-9],提升森林火情预防的全面性。为此,本研究设计基于无人机摄影的森林火情早期探测系统,以提升火情早期探测精度,为火情救援决策分析提供参考。
1 森林火情早期探测系统
利用无人机搭载可见光相机与红外相机,采集不同类型的森林图像,并搭载烟雾探测器,采集森林烟雾信息,用于后续进行森林火情早期探测。基于无人机摄影的森林火情早期探测系统结构如图1所示。
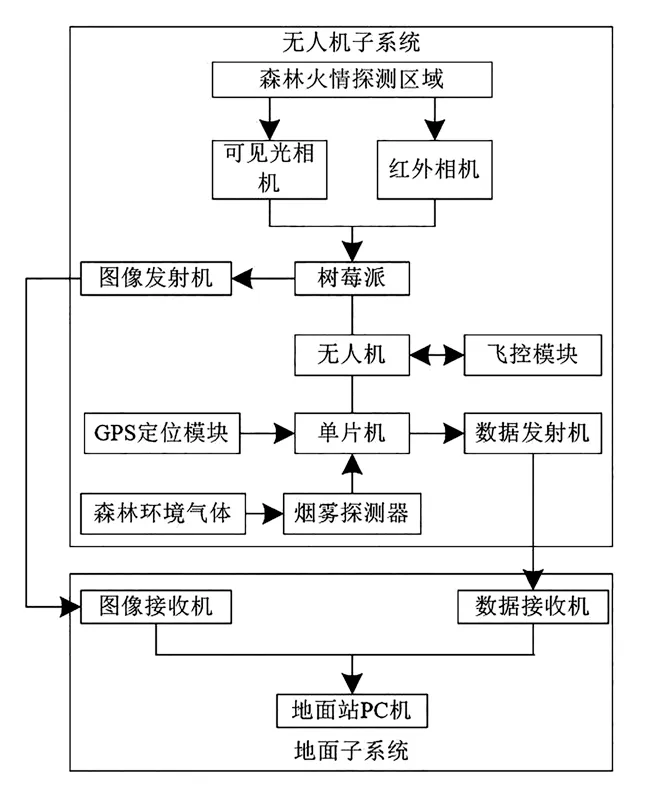
图1 森林火情早期探测系统结构
森林火情早期探测系统总共包含两个部分,分别是无人机子系统与地面子系统。无人机子系统中,利用飞控模块,控制无人机飞行至指定位置。无人机搭载了可见光相机、红外相机、GPS定位模块与烟雾探测器。利用可见光相机与红外相机,可在森林火情探测区域采集森林图像信息;树莓派利用USB接口读取可见光相机采集的可见光图像,利用SPI(serial peripheral interface,串行外设接口)读取红外相机采集的红外图像。再利用图像发射机将采集的可见光图像与红外图像,传输至地面子系统的图像接收机内。利用单片机驱动无人机搭载的GPS定位模块与烟雾探测器,采集森林气体信息与位置信息。再利用数据发射机传输采集的气体信息与位置信息至地面子系统的数据接收机内。地面子系统内,地面站PC机利用阈值分割法,分割可见光图像与红外图像,获取火焰图像;在火焰图像内,提取面积变化率与纹理特征;在RBF(radial basis function,径向基函数)神经网络内,输入面积变化率与纹理特征,以及气体信息与位置信息,输出森林火情早期探测结果。
1.1 无人机摄影飞控模块设计
无人机子系统内,利用飞控模块控制无人机的飞行状态,该飞控模块的核心是STM32主控芯片,其整体结构如图2所示。
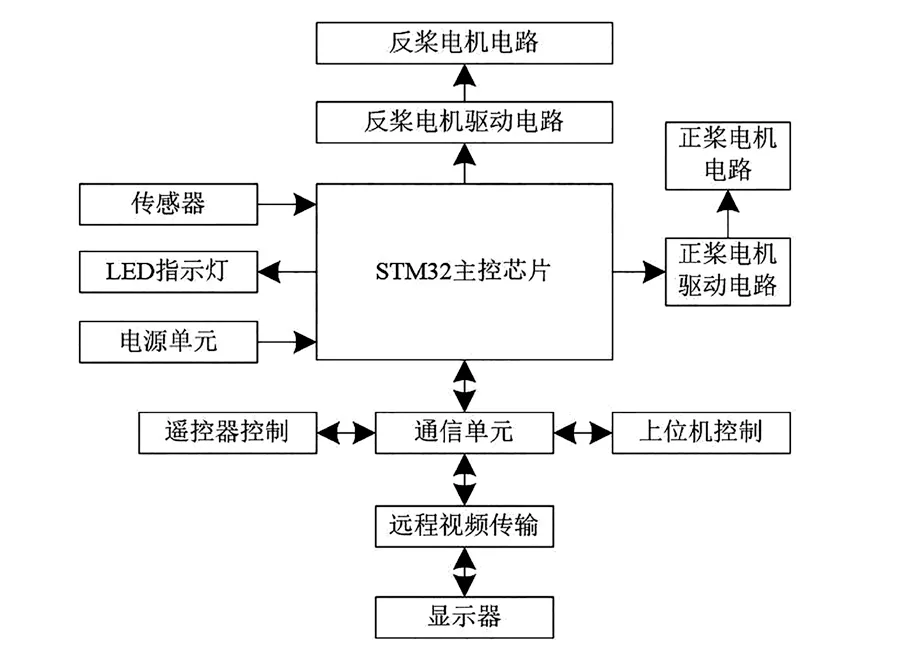
图2 飞控模块整体结构
该模块内利用传感器采集无人机飞行过程中的相关参数。STM32主控芯片包含多个IO接口,利于无人机搭载外设设备。通过电源单元为飞控模块提供电源[10]。利用主控芯片处理采集的无人机相关参数,并经由通信单元传输至显示器内。操作人员可通过显示器查看无人机的飞行状态,依据无人机的飞行状态,选择遥控器控制或上位机控制,并将无人机控制指令,经由通信单元传输至主控芯片内,主控芯片接收到控制指令后,对其进行解析[11]。依据解析后的控制指令,操作正、反桨电机驱动电路,驱动正、反桨电机电路,提升无人机飞行的可靠性与稳定性。通过LED指示灯呈现无人机的状态,当LED指示灯为红色时,说明无人机处于异常状态[12],当LED指示灯为绿色时,说明无人机处于正常状态。飞控模块内传感器的结构如图3所示。利用三轴加陀螺仪、三轴加速度计、光流传感器、GPS单元与三轴磁强计,采集无人机飞行过程中的姿态与速度等相关参数[13]。利用转换芯片对采集的无人机相关参数进行模数转换,转换速率为120 kHz。再利用SPI将转换后的数据传输至STM32主控芯片内[14]。
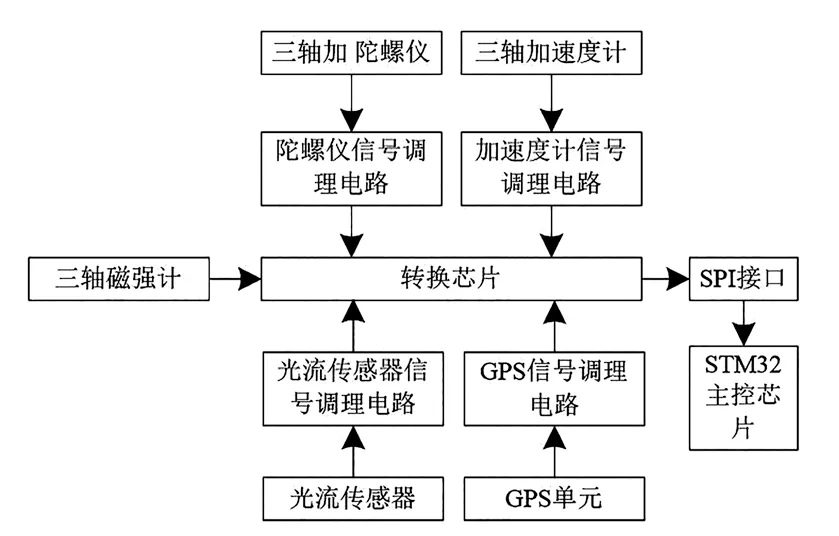
图3 传感器结构
利用飞控模块控制无人机飞行,采集森林相关信息的流程如图4所示。
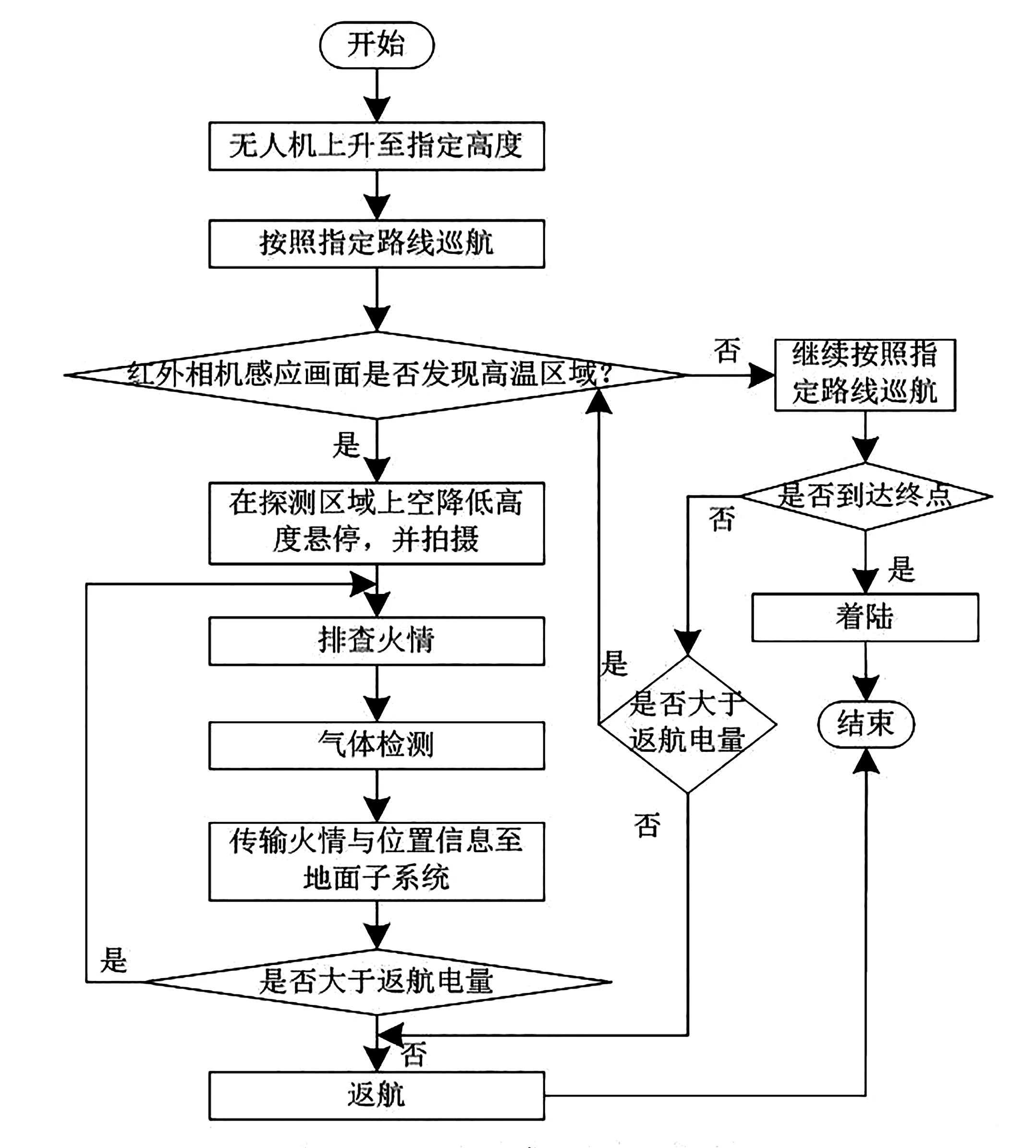
图4 无人机飞行流程
利用飞控模块控制无人机飞行,采集森林相关信息的具体步骤如下:
(1)利用飞控模块控制无人机起飞,令其上升至指定高度,得到森林探测区域的俯瞰视野。
(2)当无人机搭载的红外相机采集的红外图像内出现高温区域时,马上降低无人机飞行高度,停留在高温区域上方,采集红外图像,并利用可见光相机采集可见光图像,通过烟雾探测器采集气体信息,通过GPS定位模块采集位置信息。
(3)依据采集的红外图像与可见光图像,排查火情,得到火源信息,并将火源信息与位置信息传输至地面子系统内。
(4)利用气体信息,复测火情,精准定位火情发生点,并发出报警信息,为消防人员提供精准的位置信息。
(5)无人机飞行时,始终需要监测其电量是否超过返航电量阈值。若电量较低,那么需控制无人机返航,避免因电量过低,导致其坠毁。若电量充足,则继续依照指定路线巡航,以到达指定终点为止。
1.2 森林火焰图像特征提取
地面子系统利用图像接收机接收无人机子系统传输的森林红外图像与可见光图像后,通过地面站PC机,在接收的红外图像与可见光图像内提取图像特征。图像特征提取前,需从红外图像与可见光图像内分割出火焰图像,提升特征提取精度。对于红外图像与可见光图像来说,火焰处的灰度与其余位置的灰度不同,因此,可利用阈值分割法,分割红外图像与可见光图像,得到森林火焰图像。红外图像与可见光图像的图像分割与特征提取过程完全一致,因此,以下方法以红外图像为例。
令红外相机采集的红外图像是J(x,y),其中,像素是(x,y),特征阈值是ε,那么红外图像分割结果为:
以面积变化率ΔAi与纹理特征为红外图像的特征,令第i帧火焰图像内火焰面积是Ai,则ΔAi的计算公式如下:
利用灰度共生矩阵法,在火焰图像内提取纹理特征。令b1的灰度共生矩阵是Q,Q的第个元素值是与灰度级j、l,按照指定方向θ距离d的灰度对一起出现的次数一致。因此,此时的概率,d)为:
其中,像素灰度对出现总次数是N;第个元素值是;在θ方向上,与b1的距离是d,则
利用灰度共生矩阵可提取14个纹理特征,文中以常用的熵H、能量E、相关性S为纹理特征。
H越小,火焰图像纹理分布越紧密。H的计算公式如下:
E与火焰图像纹理平滑程度具有负相关关系。E的计算公式如下:
S与火焰图像元素分布均匀情况具有正相关关系。S的计算公式如下:
同理,利用阈值分割法,分割可见光图像,得到火焰图像,并在火焰图像内,提取面积变化率与纹理特征。以红外图像的面积变化率与纹理特征、可见光图像的面积变化率与纹理特征,以及气体信息为数据样本集,其中,样本数量是m。
2 系统性能测试与分析
以吉林省的红石国家森林公园为实验对象,该森林公园位于吉林市桦甸市,占地面积28 574.6 hm2,水域面积2 269 hm2,森林覆盖率84.6%。利用无人机摄影森林火情早期探测系统对该森林进行火情早期探测,验证无人机摄影森林火情早期探测系统进行火情早期探测的可行性。无人机摄影森林火情早期探测系统利用四旋翼无人机搭载红外相机、可见光相机、烟雾探测器与GPS定位模块,采集森林相关信息,该四旋翼无人机的具体参数如表1所示。
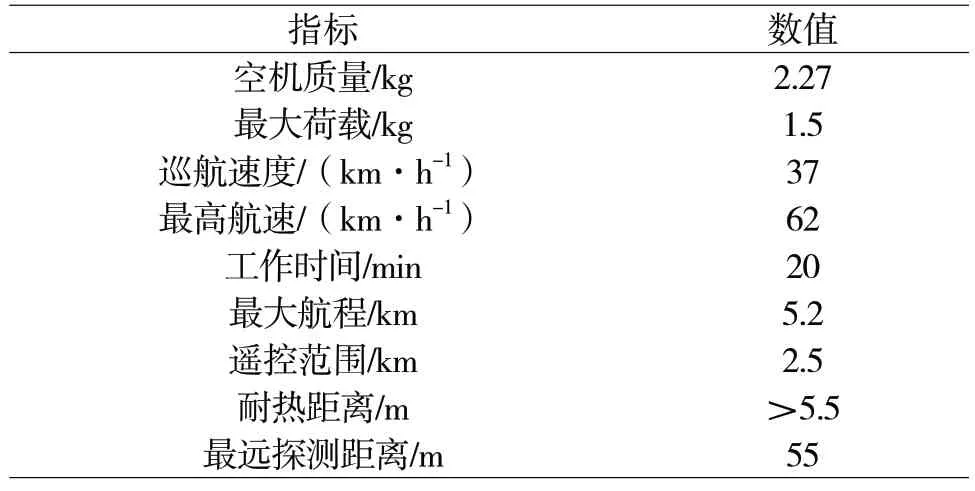
表1 四旋翼无人机的具体参数
利用无人机摄影森林火情早期探测系统采集该森林出现火情时的红外图像与可见光图像,图像采集结果如图5所示。根据图5(a)可知,该系统可有效利用可见光相机,采集森林的可见光图像。根据图5(b)可知,该系统可有效利用红外相机,采集森林的红外图像。实验证明:无人机摄影森林火情早期探测系统可有效采集森林图像,为后续火情早期探测提供数据支持。
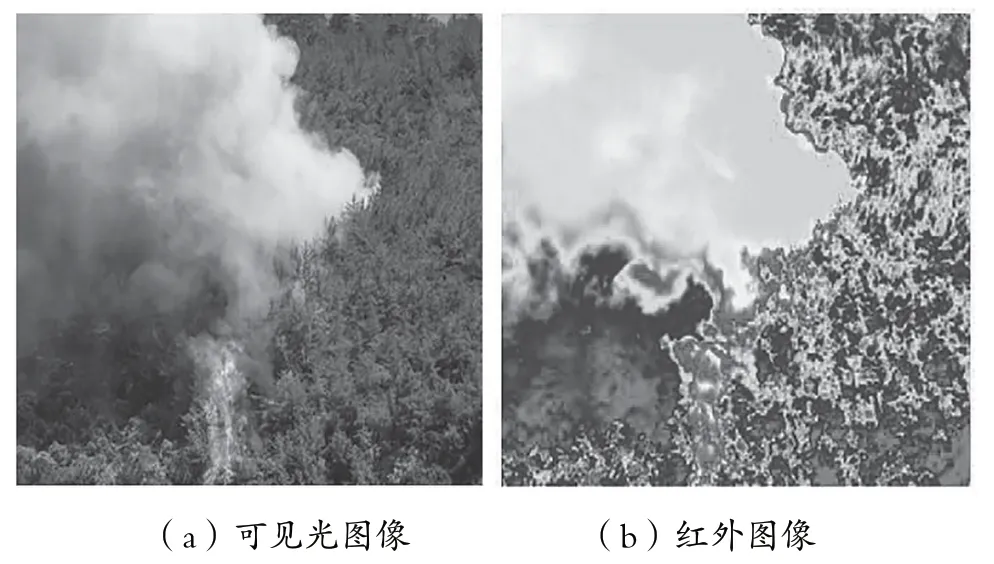
图5 可见光图像与红外图像采集结果
利用无人机摄影森林火情早期探测系统对采集的图像进行火焰分割,以可见光图像为例,火焰分割结果如图6所示。

图6 可见光图像火焰分割结果
根据图6可知,该系统可有效从可见光图像内分离获取火焰图像。进而在分离的火焰图像内提取面积变化率与纹理特征,结果如图7所示,其中纹理特征以熵为例。根据图7(a)可知,该系统可有效在火焰图像内提取面积变化率特征,由面积变化率特征提取结果可知,该森林的最大面积变化率在0.09左右,最小面积变化率在0.01左右。根据图7(b)可知,该系统可有效提取熵-纹理特征,随着森林图像采集时间的延长,熵的值不断下降,即火焰图像纹理分布越紧密。实验证明:无人机摄影森林火情早期探测系统具备火焰图像面积变化率与纹理特征提取的可行性。
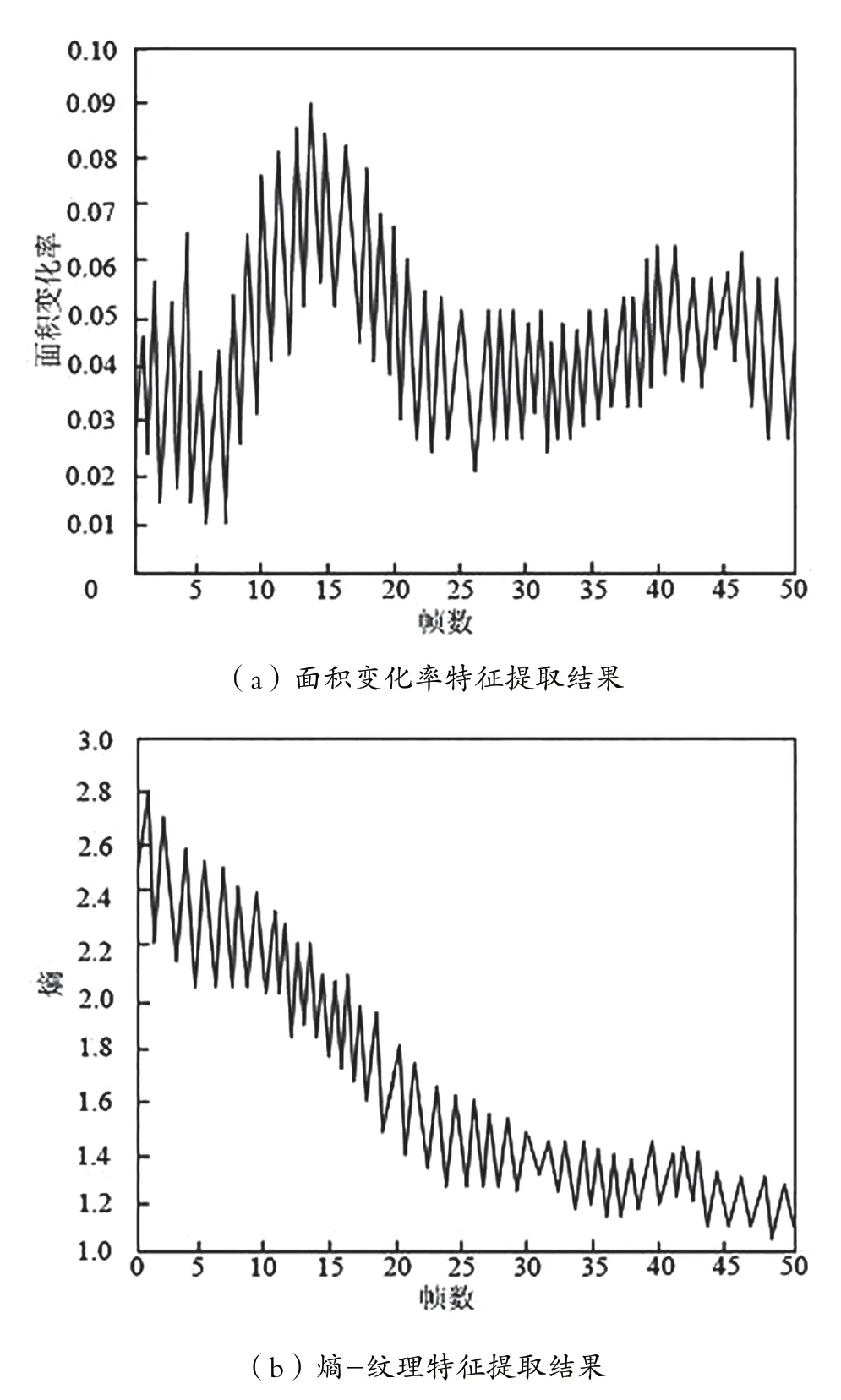
图7 面积变化率与纹理特征提取结果
利用无人机摄影森林火情早期探测系统对该森林进行火情早期探测,探测结果如图8所示。根据图8可知,该系统可有效实现森林火情早期探测,并及时发出报警信息。该系统还可实时操控无人机的飞行速度以及飞行状态。实验证明:无人机摄影森林火情早期探测系统具备森林火情早期探测的有效性。
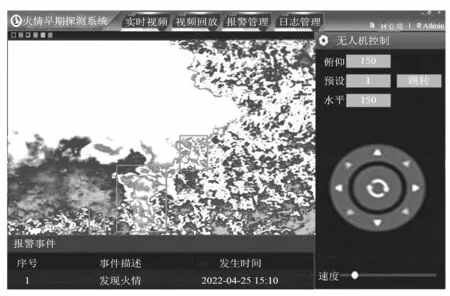
图8 森林火情早期探测结果
利用均方根误差,衡量无人机摄影森林火情早期探测系统的森林火情早期探测效果,其值越低,森林火情早期探测效果越佳。分析不同风速时,无人机摄影森林火情早期探测系统森林火情早期探测的均方根误差,结果如图9所示。根据图9可知,不同情况下,随着风速的增长,该系统探测森林火情的均方根误差均呈上升趋势。当风速低于3 m/s时,无人机不受风速影响,均方根误差并未发生改变;当风速超过3 m/s时,无人机受风速影响,导致均方根误差有所提升。其中,阴燃情况下,火情探测的均方根误差最大,原因是阴燃探测难度最大,而最高均方根误差在0.007左右,依旧较低,说明无人机摄影森林火情早期探测系统在不同风速下对森林火情早期探测的均方根误差均较低,即火情早期探测的精度较高。
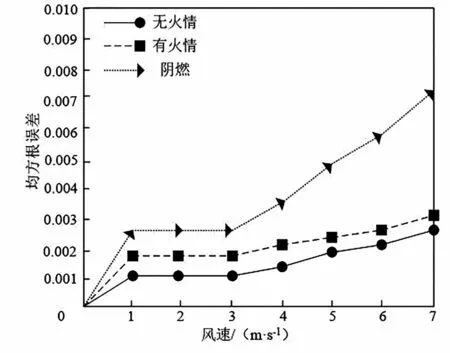
图9 均方根误差的分析结果
3 结论
如今,森林火灾发生频率越来越高,对森林火情探测研究的关注度也随之提升。无人机具备非接触、检测范围大等优势,因此,设计基于无人机摄影的森林火情早期探测系统,有助于及时发现早期火情,并快速控制火情,避免火情进一步发展,降低火情对森林的破坏程度。
