一种前移旋转升降横移式立体车库及其控制方法研究
2023-08-24邓明斌陈海初
邓明斌 陈海初
摘 要:传统的车库需要保留下层空车位空间用于上层车位的横移取车,从而造成了车位的浪费。鉴于此,设计了一种前移旋转升降横移式立体车库,并给出了其控制方法。该立体车库的设计是基于传统的3变5、4变7等双层升降横移式机械车库,设计的核心是改进一种前移、旋转、升降机构,将传统升降横移式机械立体停车设备用于挪车的不可泊车车位变成一个可用泊车车位,采用欧姆龙PLC为控制中心,光电传感器和行程开关作为检测装置,从而实现双层升降横移式机械立体停车设备泊车位利用的最大化。
关键词:升降横移式立体车库;PLC;光电传感器;行程开关
中图分类号:TP23;TP29 文献标志码:A 文章编号:1671-0797(2023)16-0054-04
DOI:10.19514/j.cnki.cn32-1628/tm.2023.16.014
0 引言
随着社会经济的不断发展,如今汽车保有量不断增加,平面停车场已经不能满足人们日益迫切的停车需求,有限的城市土地资源和早期因考虑不周导致建筑停车位不足等矛盾使城市停车难问题日益凸显。由此而诞生的机械式多层停车设备是一种低成本的停车难问题的解决方案,形成了立体停车新模式[1-2]。目前,国内外常见的立体车库有垂直升降式、简易升降式、升降横移式、垂直循环式、水平循环式、多层循环式、平面移动式、巷道堆垛式等八种,本文设计的立体车库是基于升降横移式立体车库。
升降横移式双层、多层立体停车设备是众多机械式停车设备中常见的一种。传统的3变5、4变7、5变9等双层升降横移式机械立体停车设备[3-4],由于需要保留一个下层空车位空间用于上层车位的横移取车,从而造成了车位空间的浪费,增加了车位的均价成本,因此亟需得到改进,从而实现全部车位空间的有效利用。
基于以上缺陷,本文在传统双层升降横移式机械立体停车设备基础上,通过改进设计一种前移、旋转、升降机构,使传统升降横移式机械立体停车设备用于挪车的不可泊车车位变成了一个可用泊车车位,从而实现了双层升降横移式机械立体停车设备泊位利用的最大化。这样不仅可实现双层升降横移式机械立体停车设备可用泊车位的增加,也可以实现3~6层升降横移式机械立体停车设备可用泊车位的增加。
1 立体车库系统机械结构设计
1.1 系统各部分组成及功能
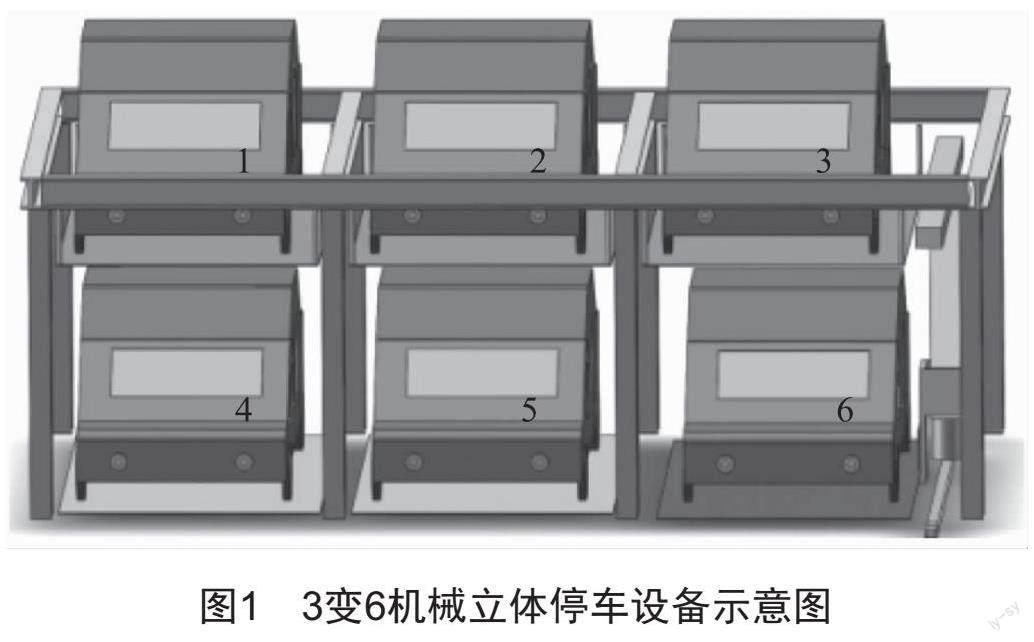
本立体车库在传统的图1所示3变5车位设备右下空间位置设计安装可前移、旋转、升降的停车机构,实现第6停车位。第6停车位主要由以下部分组成:停车台板、挂架、行走箱体(箱体内包含行走驱动电机、传动机构组件及行走轮、旋转电机及蜗轮蜗杆传动组件等)、旋转立柱、上支撑滚轮、上支撑导槽(安装有机械限位挡块及行程开关)、提升电机及传动机构组件、下支撑导轨(安装有机械限位挡块及行程开关),以及各种标准件、安全锁紧机构、位置传感器等[5]。
提升电机及传动机构组件整体安装在旋转立柱上,传动机构输出轴通过双排或者三排链条与挂架连接,当提升电机转动时,实现对停车台板的升降控制[6-7];下支撑导轨一方面通过行走轮组对行走箱体、旋转立柱、停车台板等第6车位停车设备整体起到支撑作用,另一方面确保了行走箱体沿支撑导轨的路径前后移动移车,挂架安装在旋转立柱上,并通过多个支撑滚轮与旋转立柱形成移动副,可以沿旋转立柱上下升降移动,此外,旋转立柱顶部还安装有机械挂钩安全锁紧机构,用于在挂架带动停车台板上升后,实现对挂架的机械锁定,确保设备安全。
所有的停车台板上均设计安装有压力传感器,用于自动检测车位停车台板上是否停有车辆。
1.2 嵌入式前移旋转升降横移工作原理
1.2.1 情形一
当停车数量在5车及5车以下时,PLC控制系统会始终将第6停车位保持初始状态,其车位存取方式按5车位的存取模式运行。首先在设备管理控制面板上输入存车车位号(也可采用遥控操作),如4号车位,然后将车辆开进第4停车位的停车台板上停好,再按设备管理控制面板上的“确认”键即可完成停车;当再有人来存车时(2号车位空闲),PLC控制系统将5号车位停车台板(带着台板上所停的车辆)向6号车位横移,横移到行程开关限定位置后,2号车位的升降电机转动,释放提升链条,使2号车位的停车台板降落到5号车位,再将车辆开到停车台板上,然后按下设备管理控制面板上的“确认”键,2号车位的升降电机转动,带动链条提升2号停车台板上升到程序设定位置后停止运动,完成升降横移停车作业。
1.2.2 情形二
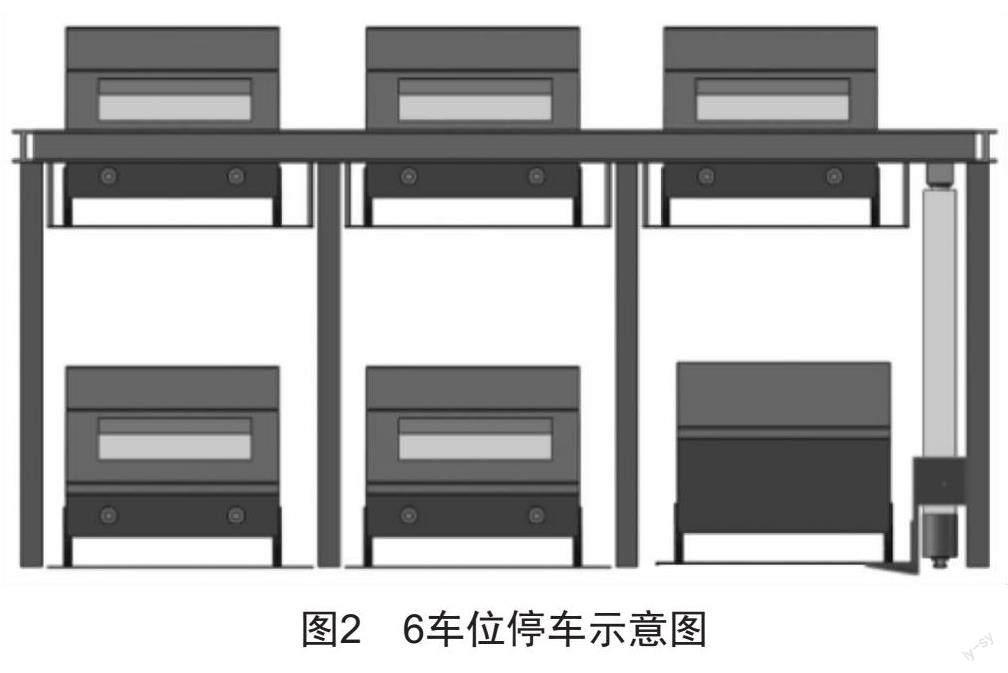
1~5号停车位已经停满车辆,需要在6号停车位上停车时,PLC控制系统控制6号停车位的停车台板下降到程序设定位置(图2),然后将待停车辆开到6号停车台板上,再按设备管理控制面板上的“确认”键,设备控制系统将首先驱动旋转立柱带动6号停车台板顺时针旋转90°,然后行走电机驱动6号停车位设备整体向后移动到程序设定位置,缩进到整个设备的停车位内,完成停车,从而实现3变6车位的全部利用,使车位利用率达到100%。
1.2.3 情形三
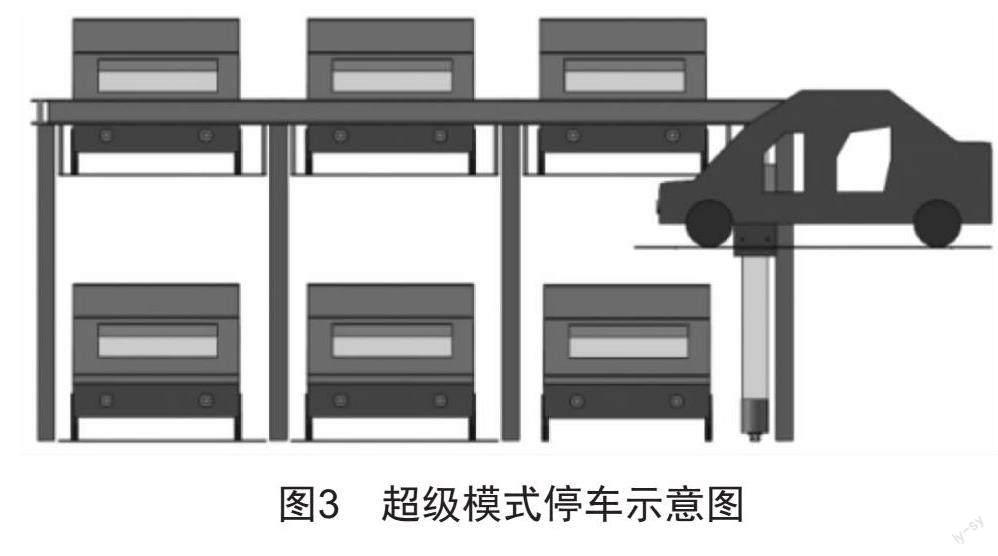
该情形为超级模式,设备的PLC控制系统设定在每晚22:30以后为该模式可运行时间段,首先需要确保6个车位停满车辆(非该时间段或车位没有停满时,即使输入超级密码也无法运行),其次必须由设备运营管理员输入超级密码(或刷超级停车模式授权卡)才可以运行操作(图3)。管理员输入超级密码后,可以通过手动按键将6号车位的行走箱体及停车台板移出设备的停车位,然后旋转90°,接着控制设备的提升电机将6号停车台板及台板上所停车辆提升到图中位置,然后将晚归车主的车辆停入到6号车位中,从而实现了特殊时段的3变7停车位,大大提升了設备的车位使用率。
2 立体车库的控制系统设计
2.1 硬件设计
嵌入式前移旋转升降横移式立体车库的控制系统框图如图4所示,存取车控制系统流程图如图5所示。
控制系统主要包括限位开关、光电开关传感器、上位机、旋转升降横移电机、PLC模块,客户通过上位机给PLC发送信息,输入想要存车或取车的指令。同时,系统具有急停按钮,遇到紧急情况可直接断开设备主电源。
限位开关分为上限、上极限、下限、下极限,当车位到达指定位置后触发限位开关,PLC接收信号后给出停止命令。光电传感器安装于车前和车后两侧,防止有人误入和车辆超后。微动开关负责检测上升车位链条的松紧,检测上层车板掉落的装置是否打开[8]。继电器用于PLC控制电机的启动、运行,同时若车库出现故障或者有人误入的情况,可以紧急停止车库运行。PLC接口分配如表1所示。
2.2 车库液晶操作器设计
车库液晶操作系统是为立体车库所设计的操作器,通过人性化的人机界面、简单易操作的系统,使得用户可以很方便地使用立体车库进行存车和取车。
车库液晶操作器采用STM32为主控芯片、LCD12864液晶显示屏、RS232通信模块、4×4矩阵键盘模块,同时还有急停按钮与手自动模式旋转按钮。
上位机(车库液晶操作器)与PLC间采用串行通信,即通过PLC上的串行口(RS232口)进行通信。PLC的串行口支持的通信方式有很多种,本文使用的上位机连接系统为HostLink系统,HostLink系统是对于FA系统一种既优化又经济的通信方式[9],允许一台上位机通过上位机连接命令向HostLink系统的PLC发送命令,PLC处理来自上位机的每条指令,并把结果传回上位机,所有通信也会做奇偶校验和帧校验,从而估计出通信中的错误。上位机连接命令格式如图6所示。
上位机的连接参数设置:波特率为9 600 B/s,数据位、停止位和奇偶校驗位均为默认值(缺省值)。在主控STM32芯片中新建变量,与PLC中相应的数据内存DM区关联,实现上位机、下位机间的通信[10]。液晶屏采用LCD12864模块,直接使用其自带字库来显示中文,不需要自己编码,发送数据使用8位并行模式。信息的输入采用4×4矩阵键盘模块,和单片机的GPIO口连接后,编写相应的按键扫描函数即可输入要存取的车位号。其上位机设计如图7所示。
3 系统调试试验与分析
3.1 车库调试试验
将车位设备各部分安装完成并输入写好的程序后,对立体车库在三种存取车情形下进行运行调试。试验结果表明,在所有情形下,立体车库都可以准确稳定可靠地对车位进行存取操作。上层车位的升降时间为23 s,下层车位的横移时间为12 s,第6停车位的旋转时间为16 s,升降时间为20 s。
经过多组试验包括空载运行、负载运行,系统均保持无故障运行。测试其安全装置,包括人车误入、车辆超后、运行警示等,都可以及时准确报警。
3.2 系统分析
(1)结构简单,基于传统升降式停车设备进行改造,改造方便且成本低。
(2)结合升降横移与旋转无避让两种立体车库的优点,实现了3变6、4变8等车位,相比传统的3变5、4变7升降横移式立体车库,增加了一个车位,提升了设备空间的利用率,节约了土地资源,降低了设备的均价成本,提高了设备的整体售价。
(3)超级模式使本设计在特定时间段可以停放更多的车。
4 结论
立体车库目前是解决停车难问题的首要方法,是现代城市停车库的发展方向。本文以最大化利用传统升降横移式车库空车位为出发点,设计了一种嵌入式前移旋转升降横移式立体车库,该立体车库可以自动、可靠完成车辆存取,且结构稳定简单、设计巧妙、维护便捷,提高了车位的利用率,因而具有重要的理论意义和使用价值。
[参考文献]
[1] 付翠玉,关景泰.立体车库发展的现状与挑战[J].机械设计与制造,2005(9):156-157.
[2] 马幼捷,张海涛,邵保福,等.电子智能化立体车库的研究现状与走向[J].电气自动化,2008,30(5):3-6.
[3] 杨永平.智能化立体车库研究与设计[J].工业建筑,2006,36(增刊1):148-150.
[4] 张华强,王陶,苏晓良,等.基于HMI和PLC的立体车库自动控制系统[J].电气传动,2005,35(8):50-53.
[5] 陈艳玲.基于PLC开放式立体车库控制系统设计[J].电气技术与经济,2018(2):21-26.
[6] 张长缨,张侃谕.智能型立体车库的构成及智能化方案[J].自动化与仪表,2002,17(1):35-37.
[7] 谢爱梅.基于PLC的立体车库控制系统设计[J].时代农机,2017,44(6):76-77.
[8] 许士杰,唐晨,许炯炯,等.PLC控制的新型立体车库[J].机电工程技术,2019,48(2):58-59.
[9] 孟广耀,穆国振,王文涛,等.新型立体车库设计及分析[J].中国工程机械学报,2019,17(4):340-344.
[10] 汪有,范恒亮.智能立体车库结构与系统设计[J].内燃机与配件,2020(2):213-214.
收稿日期:2023-04-27
作者简介:邓明斌(1995—),男,广东韶关人,研究方向:移动机器人技术。
