无人机倾斜摄影技术在水利工程周边地形勘探中的应用
2023-08-23冯志伟
冯志伟
(西藏自治区昌都市丁青县水利局,西藏 昌都 855700)
1 概 述
水利工程附近存在的岩体是地形勘察过程中的关键对象,在自然界中岩体通常被建筑物和植被覆盖。经调查发现,海岸、湖泊、河流是水利工程选取概率最高的建筑地点,因为上述区域裸露的岩体较少,但这种地形特点也增加了水利工程地形勘探的难度。目前,国内外勘探人员通常根据历史状况、线推测面和地形勘探点勘探水利工程周边地形。但岩石属于一种不均匀质体,具有较强的各向异性,上述测量方法在勘探过程中容易受到多种不确定因素的影响和限制,因此需要研究水利工程周边地形勘探方法。
魏向阳等[1]在不同角度中拍摄工程区域,采用SfM法,根据采集的照片重构水利工程周边地形,完成地形勘探,该方法在三维重构过程中丢失了细节信息和纹理信息,重构精度低,重构影像的分辨率低。陈炳锦等[2]通过小波多尺度分解方法,分解处理采集的地形数据,利用功率谱法计算各阶数据的场源深度,在2.5D人机交互反演的基础上拟合上述数据,在Voxler软件中重建地形,实现地形勘探,该方法勘探结果的水平误差和垂直误差较大,勘探精度低。
为了解决上述方法中存在的问题,本文引入无人机倾斜摄影技术,提出基于无人机倾斜摄影技术的水利工程周边地形勘探方法。
2 方 法
2.1 无人机倾斜摄影系统
基于无人机倾斜摄影技术的水利工程周边地形勘探方法所用的无人机倾斜摄影系统由以下几个部分构成:
1)iFly D1四旋翼无人机飞行平台。iFly D1属于专业的摄影飞行平台,多用于航空拍摄,具有稳定性高、整体性能好和成本低等优点,可用于地形勘探。该平台的性能参数见表1。
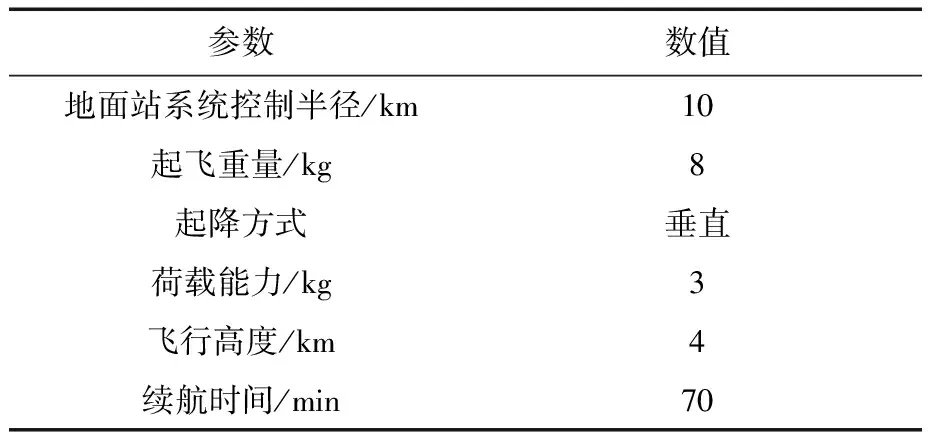
表1 iFly D1四旋翼无人机飞行平台
2)iCam Q5专业倾斜相机。该相机具有覆盖范围广、分辨率高的优点,本次勘探所用的相机分辨率为0.01~0.1m,重1.68kg,可用SD卡存储图像数据,像素高于1亿。
3)倾斜数据处理软件。系统使用DP-Smart软件实现三维建模,在建模过程中,将多源序列影像输入DP-Smart软件中,生成高分辨率的三维模型。
2.2 数据采集
数据采集是水利工程周边地形勘探过程中的重要环节,地形勘探的精度和质量直接受数据采集结果的影响。无人机实际的航测区域并不是水利工程周边地形勘探的范围,需要经过无人机多次飞行,才能确定水利工程周边地形勘探区域。见图1。

图1 航测区域测量示意图
无人机倾斜摄影系统中的相机在飞行拍摄过程中与水平方向呈45°夹角[3-4]。确定水利工程周边地形航测范围时,需要将水利工程区域作为有效区域,在此基础上扩充无人机的飞行高度,这种测量方式可以获取完整的纹理照片。当水利工程区域的范围较大时,一组电池无法支撑无人机完成整个水利工程区域的航测,因此考虑电池续航时间、地势变化情况以及区域形状划分水利工程勘探区域,并规划无人机的航线,确保工作效率和数据精度。
为了提高水利工程周边地形勘探的精度,需要将大量的像控点布置在水利工程周边地区的整个测区内。在布置过程中,选择没有电线和树木遮挡且地势平坦的区域布置像控点。
完成像控点布置后,计算无人机倾斜摄影的误差,并对其误差展开修正,获取地面坐标。本文所提方法选用均方根误差RMSE作为无人机倾斜摄影技术的位置精度,公式如下:
(1)
式中:n为像控点数量,个;e为总误差,m;eei、epi分别为第i个像控点的垂直距离误差和水平距离误差,m;xi、yi、zi为检查点i对应的三维坐标;xj、yj、zj为拟合点j对应的三维坐标。
2.3 数据融合
基于无人机倾斜摄影技术的水利工程周边地形勘探方法,融合倾斜数据和激光点云数据,用于水利工程周边地形三维模型的重建。
1)提取名称相同的特征点对,建立平移矩阵T1和旋转矩阵R1,粗拼接处理两个矩阵中存在的数据。


特征点配准的具体过程:用T表示平移矩阵,用R表示旋转矩阵,上述矩阵可根据无人机倾斜摄影数据N和激光点云数据S计算得到,公式如下:
(2)
式中:AS为在激光点云模型S中同名点对应的坐标;AN为在无人机倾斜摄影测量模型N中同名点对应的坐标;XS、YS、ZS为S的坐标值;XN、YN、ZN为N的坐标值;β、χ、η、t1、t2、t3为坐标转换参数,可利用最小二乘法计算得到。
通过式(2)获得T、R的数值,根据计算结果构建转换矩阵W=[R|T]。
将模型N中各点对应的坐标(XNi,YNi,ZNi)代入转换矩阵W=[R|T]中,可获得模型S中数据对应的坐标值(XSi,YSi,ZSi),完成数据配准融合,公式如下:
(3)
2.4 地形三维模型
采用光束法联合空三测量方法,对融合后的数据展开处理[7],建立像点观测方程B、外方位元素模拟观测方程Bd和控制条件方程BG。在上述方程的基础上,获得消除畸变的水利工程周边地形影像,公式如下:
(4)
式中:Δ为水利工程周边地形影像外方位元素对应的改正数;P1为B的权阵;V为系数矩阵;ΔT为连接点坐标对应的改正数;LG为控制点改正数在三维建模过程中的系数矩阵;ΔG为控制点坐标在三维重建过程中的改正数;LT为连接点改正数对应的系数矩阵;Z为计算结果与像点观测值之间的差值;Pd为Bd的权阵;O为单位矩阵;Zd、ZG均为虚拟观测向量;PG为BG的权阵。
本文所提方法利用匹配地形影像的方式创建立体像对。首先格网划分处理水利工程周边地形的空间平面,密集匹配处理无人机倾斜摄影技术采集的地形影像;采用并行算法计算同名点在各个地形影像中对应的坐标,以此为依据,计算高密度三维点云数据,构建DSM;采用纹理映射的方法,得到水利工程周边地形三维模型[8],完成水利工程周边地形的勘探。具体流程见图2。

图2 水利工程周边地形勘探流程图
3 实验与分析
为了验证基于无人机倾斜摄影技术的水利工程周边地形勘探方法的整体有效性,需要展开相关测试。
采用基于无人机倾斜摄影技术的水利工程周边地形勘探方法、文献[1]方法和文献[2]方法,对图3中的水利工程地形展开勘探,地形重建结果见图4。
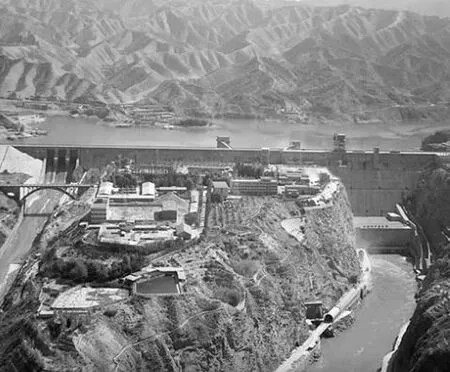
图3 勘探对象

图4 不同方法的地形重建结果
分析图4可知,采用所提方法重建的水利工程周边地形与实际地形相符,可清楚体现出地形的细节信息和纹理信息,而文献[1]方法和文献[2]方法的重建结果清晰度较低,存在细节信息丢失的现象。
通过上述测试可知,所提方法重建结果的细节信息和纹理信息清晰。
为了测试所提方法、文献[1]方法和文献[2]方法的勘探精度,将水平误差e*和垂直误差z*作为指标,其计算公式如下:
(5)

上述方法的水平误差和垂直误差见图5。

图5 不同方法的勘探误差
分析图5可知,所提方法在水利工程周边地形勘探过程中的水平误差和垂直误差均小于文献[1]方法和文献[2]方法。因为所提方法在数据采集过程中对像控点的位置展开了校正,提高了像控点布置的精度,可准确提取水利工程周边地形数据,进而降低了勘探结果的水平误差和垂直误差,提高了所提方法的勘探精度。
为了进一步测试上述方法的有效性,将分辨率作为指标,测试所提方法、文献[1]方法和文献[2]方法勘探影像的分辨率,见图6。

图6 不同方法的分辨率
由图6可知,所提方法的勘探影像分辨率最高。因为所提方法利用无人机倾斜摄影技术采集地形影像数据时,控制相机在飞行拍摄过程中与水平方向呈45°夹角,可获得高分辨率的影像。
4 结 语
目前,国内外勘探人员通常根据历史状况、线推测面和地形勘探点勘探水利工程周边地形,但岩石属于一种不均匀质体,具有较强的各向异性,地形勘探具有一定的难度。针对目前水利工程周边地形勘探方法存在的勘探精度低、分辨率低和清晰度差的问题,提出基于无人机倾斜摄影技术的水利工程周边地形勘探方法。该方法利用无人机倾斜摄影技术获得高分辨率的地形影像,融合无人机倾斜摄影数据和激光点云数据,采用光束法联合空三测量方法,重建水利工程周边地形三维模型,完成地形勘探,有效解决了目前方法中存在的问题,为水利工程的选址和建设工作提供了数据依据。