仿生机械摆动筛设计
2023-08-22徐荣友苗洪敏
徐荣友 , 苗洪敏
(1.扬州大学机械工程学院,江苏 扬州 225000;2.扬州启达知识产权代理事务所,江苏 扬州 225000)
在物料分离领域经常使用振动原理作为筛体的激振源,振动筛利用高速振动的原理对物料进行筛分,对机器的破坏性很大,长时间容易引起变形、筛网损坏。针对这一缺点,摆动筛的理念逐渐走进人们的视野,摆动筛有轻微的椭圆摆动运动,无高速振动,可以克服振动筛的以上缺点。摆动筛与振动筛相比采用了仿人工筛分原理,物料在筛面做非线性的三维运动,既有圆周运动,又有上抛弧运动,而振动筛是采用双电机或直立式电机驱动,物料运动轨迹是一台直线或者水平、倾斜、垂直的三次元运动。摆动筛由于采用了仿人工筛分并加设了清网装置,所以更加适合质地较粗或者筛分环境复杂的不规则或潮湿的物料,克服了普通振动筛的堵网风险。而振动筛属于非平衡破坏暴力运动,利用了振动原理来筛分物料,所以有时还会破坏物料。摆动筛的出现,改变了精细筛分领域的格局,彻底打破了振动筛的统治局面,从根本上解决了振动筛的缺点和不足。本文对仿生摆动筛进行了进一步的研究,有利于推动物料分离领域仿生摆动筛的进一步发展[1-6]。
1 总体设计思路
本研究小组提出的仿生机械摆动筛是一种结构简单、便于维护且生产高效的新型物料分离机构。本设计建立了人机交互模式,通过蓝牙通信控制单片机对电机进行启停、调速控制。通过曲柄滑块机构进行动力传递,带动机械摆动筛进行仿生运动并分离筛选物料,可适应工况复杂、物料直径较大的待分离对象。本研究主要包括仿生机械摆动筛的整体结构设计、仿生推动手臂设计、转轴组件设计、推动结构设计、控制系统设计等。
2 整体结构设计
仿生摆动筛整体结构示意图如图1 所示,整体框架结构由顶部框架1 和底部框架2 组成,局部由横梁3、转轴组件4、侧网5、床体6、悬吊支架7 和仿生手臂9 连接构成。横梁连接固定在顶部框架上,转轴组件与横梁固定连接,悬吊支架的上端与转轴组件固定连接,悬吊支架的底端与床体固定连接。悬吊支架与转轴组件形成转动连接,仿生手臂设置在整体框架结构的外侧,仿生手臂与悬吊支架活动连接;通过仿生手臂的往复运动,实现床体的平稳摇动。

图1 整体结构示意图
3 仿生推动手臂设计
3.1 仿生手臂结构设计
仿生手臂结构示意图如图2 所示,由立柱、安装板、伺服电机、曲柄、连杆、导向滑块和推杆连接构成。立柱与顶部框架固定连接,安装板固定设置在立柱的顶部,伺服电机连接设置在安装板的底面,曲柄、连杆、导向滑块和推杆连接设置在安装板的顶面,曲柄由伺服电机驱动连接,推杆滑动设置在导向滑块内,推杆的一头与悬吊支架连接,推杆的另一头通过连杆与曲柄连接。
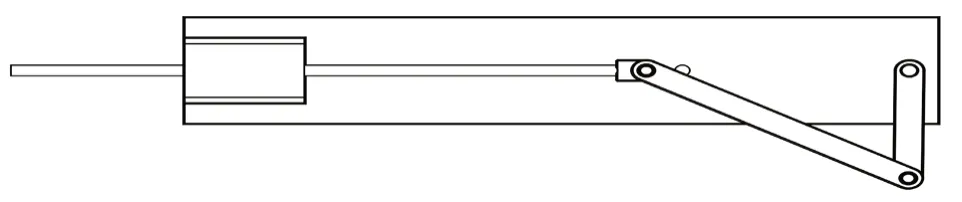
图2 仿生手臂结构示意图
3.2 仿生手臂原理
由图3仿生手臂原理示意图可知,仿生手臂采用的是曲柄滑块机构,将曲柄1的回转运动变换为滑块3的往复运动,2 为连杆,4 为机架。曲柄滑块机构中运动副为低副,各元件间为面接触,构成低副两元件的几何形状比较简单,加工方便,易于得到较高的制造精度,因此选用曲柄滑块机构作为仿生手臂的基本形式。若已知各结构的尺寸参数、位置参数和原动件的运动规律,即可完成对曲柄滑块机构运动特性的分析。
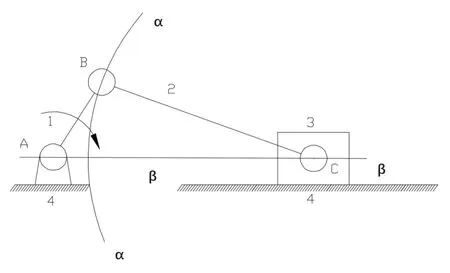
图3 仿生手臂原理示意图
3.3 仿生手臂运动特性分析
3.3.1 位置分析
为了对机构进行运动分析,将各构件表示为矢量,可写出各杆所构成的封闭矢量方程。将各矢量分别向X轴和Y轴进行投影,得:
求解得:
3.3.2 速度分析
将式(1)、(2)对时间t求导,得速度关系:
将式(3)、(4)用矩阵形式来表示,如下所示:
3.3.3 加速度分析
将式(3)、(4)对时间t求导,得加速度关系:
采用ANSYS Workbench 软件对仿生手臂进行刚体动力学分析,对仿生手臂工作过程中的位移、速度、变形量进行分析,分析结果如图4 所示[7]。从图4(a)、图4(b)中可以看出,X轴方向所示的变形量最小,符合实际要求。从图4(c)中可以看出,推杆的速度变化平缓,最高速度仅为0.1 m/s 左右,速度轻柔和舒缓,可以满足婴儿的睡眠要求。从图4(d)中可以看出,在仿生手臂运动变化过程中,只有X轴的位移发生变化,Y、Z轴方向的位移不发生变化,符合仿生手臂实际工作的位移变化。

图4 仿生手臂ANSYS 刚体动力学分析结果图
4 转轴组件设计
转轴组件结构示意图如图5 所示,由连接板1、轴承座2、转轴3、轴端支架4 和轴承8 连接构成。两个轴端支架与横梁6 连接固定,两个轴端支架的内侧面上设有中心孔5,轴承座、轴承、转轴和连接板设置在两个轴端支架之间,连接板设置在轴承座的下方,轴承固定设置在轴承座内,转轴固定在轴承内部,转轴的两头与轴端支架的中心孔配合连接。轴承的外圈与轴承座的内圈过盈配合,轴承的内圈与转轴的外壁过盈配合,转轴的两头与中心孔间隙配合。

图5 转轴组件结构示意图
5 推动结构设计
推杆与悬吊支架之间设有连接块,连接块的一端设有通孔,另一端设有卡槽,连接块通过通孔套置在悬吊支架上,推杆的头部设有卡块,卡块与卡槽插接连接并通过销轴形成相对转动。通过仿生手臂的往复运动,实现床体的平稳摇动,推动结构示意图如图6所示。

图6 推动结构示意图
6 仿生手臂控制系统设计
仿生手臂控制系统主要由HC-05 蓝牙模块、STC89C52RC 单片机、直流步进电机驱动板L9110S两路H 桥、XL4016 直流8 A 可调降压模块和控制电源等组成。本系统基本工作方式如下:在手机模拟串口发出指令,通过HC-05 蓝牙模块传递给STC89C52RC 单片机,控制28BYJ-48 电机转动,并实现电机速度的快中慢调节。XL4016 直流8 A 可调降压模块采用XL4016 调压芯片,配合100 A 双整流桥+大储能电感,对直流功率PWM 调压;HC-05 蓝牙模块通过串口与51 单片机连接,实现人机交互,通过手机端的蓝牙调试器App 发送控制信息(两者之间的通信方式为串口通信,波特率设置为9 600),在App中设置五个键,分别用作启、一挡速、二挡速、三挡速、停,按键按下去后会通过串口发送对应的数值,51 单片机的SBUF 寄存器存储接收到的值,然后对接收到的信息进行处理[8-10]。

7 结语
综上所述,本研究从仿生机械摆动筛的整体结构设计、仿生推动手臂设计、转轴组件设计、推动结构设计、控制系统设计等分别进行探讨,尤其是通过ANSYS 软件对仿生机械手臂进行了参数优化设计,求出仿生机械摆动筛的尺寸参数最优解,在保证动力传递的同时进行了轻量化设计,从结构和控制两个大方向上分别进行了相应的现代设计,弥补了振动筛的相关不足,提高了物料分离领域的工作效率,并克服了相关的复杂工况,为仿生摆动筛相关结构设备的研发提供了参考。
