基于Automation Studio 的甘蔗收割机刀具高度自适应仿真
2023-08-22高鸣伟
高鸣伟 ,陈 鑫
(长安大学工程机械学院,陕西 西安 710064)
0 引言
我国甘蔗种植农艺是一次播种可收获三年[1],收割后的甘蔗宿根将重新生长,在垄面上对甘蔗进行切割,会导致留茬过高,造成甘蔗宿根破损或者病坏,影响第二年发芽;割刀位置过低,会加大刀片的磨损且增加切割阻力,造成能量的浪费[2],合适的切割高度为地面以下3 cm。我国90%的甘蔗种植在广西、云南和广东等南部省份,种植地的地形起伏较大,蔗垄高低不平,加上田间甘蔗茎叶和杂草密布,遮挡操作人员视线,割刀高度完全取决于操作人员的经验,造成收割质量无法满足农艺要求,导致我国甘蔗机械化收割率较低[3]。为促进甘蔗生产机械化进程,迫切需要甘蔗地形的感知和割刀高度控制方法,提升甘蔗收割质量。
现有的地形感知方法有接触式和非接触式两种,其中非接触的地形检测包括激光、超声波、视觉、探地雷达和三维点云等方法,并在车辆导航、农机的地形感知上得到应用。张伟东等[4]提出了一种基于视觉特征的地形感知方法,利用双目视觉将近景的地形样本分为障碍与地面实现地形感知,但识别结果受光线强度影响大。邹展曦等[5]利用超声波测量甘蔗地垄间地形变化来控制刀盘切割高度,但在实际工作过程中易受甘蔗叶等的干扰。非接触式方法可以感知地形,但是在蔗田里易受甘蔗叶、桔梗和杂草的干扰,难以实际应用。相比之下,接触式方法可以有效解决杂草等遮挡物干扰的问题,如Neves 等[6]通过在切割刀底部平面设计一个凸起“圆毂”来调节切割器的高低,以适应蔗田的起伏变化,然而该浮动“圆毂”的重量会对切割后的宿根造成损坏。Palmute[7]设计了一种倒壳形机构与地面接触,利用蔗垄高度变化引起该机构位移电信号改变来调节切割刀盘高度,该方法仅适用处理较大范围的地形变化识别,如斜坡、凹坑等,无法用于小范围的地形变化感知。以上研究表明接触式可有效用于地形感知,可以为甘蔗收割机的割刀高度自适应调整提供依据,但是现有的方法未考虑到机器工作中车身姿态和割刀装置的影响,从而导致了地形感知结果存在较大误差,有效的蔗田地形感知方法仍在探索中。
针对甘蔗收割机缺乏高效的地形感知方法而导致甘蔗收割不能满足农艺要求的问题,本文提出应用拖板式传感器获取地面高度变化情况,结合车身所装的倾角传感器所检测的车身姿态变化及地形坡度变化,利用数据处理模型计算出收割机刀具离地高度。并开展了地形感知试验,采用Automation Studio 机电液仿真软件,验证最优PID 参数的工作性能和切割高度自适应系统的可靠性,实现甘蔗收割过程中割刀高度的自适应调控。此地形感知方法还可推广到其他农机,用于提升农机的智能化水平。
1 接触式地形感知系统设计
1.1 甘蔗收割机工作原理
针对丘陵地带的甘蔗按照垄栽培种植特点,主要采用小型甘蔗收割机收割。为此,文中以小型切段式甘蔗收割机为研究对象,如图1 所示,收割机主要包括动力系统、行走驱动系统、收获系统及控制系统。

图1 小型切段式甘蔗收割机
收割机配备了60 kW 的柴油发动机,通过将机械能转为液压能,实现车辆的移动和工作。行走驱动系统采用履带行走装置,可较好地应对我国甘蔗种植区域的坡度大且土壤承载能力差的问题。收获系统为甘蔗收割机的工作装置,负责将甘蔗按照图1 中箭头指引流程顺序完成收获,如分蔗/扶蔗→压倒→切割→喂入→剥叶→输送→切段→除杂→收集。本文研究的割刀机构在收割机的前端,处于分蔗/扶蔗中间,通过伸缩油缸实现割刀的升降。
1.2 地形感知原理
在前期接触式地形传感器的基础上[8],根据甘蔗收割机的特点进一步提出整机的地形感知方法,设计了一种如图2 所示的接触式地形高度检测传感器。工作时随着收割机的移动,拖板由于自身重力和单向阻尼器的作用,能始终保持与蔗田地形的良好接触;拖板将安装于压蔗辊单侧,该安装位置不仅位于割刀前方,且尽可能地靠近割刀的切割路径,保证了检测的有效性;拖板底部弧形结构可以避免被蔗叶、杂草、泥土及滴管缠绕,而且中部的弯曲结构也能够尽可能降低对突变地形检测时的提前响应。但在甘蔗收割机田间收获时,地形传感器检测的地形高度并不能准确反映实际的地形高度,其还会因切割机构升降与地形传感器产生的相对夹角,导致升降的不可控;地形起伏产生的机身姿态角,造成地形传感器反馈的地形高度数据失真且误差大。因此,当地形发生变化时,接在刀架装置上的拖板角度变化,其变化角度大小与地形起伏有关,结合安装在刀架装置及驾驶室上的倾角传感器以感知车身姿态,从而实现地形起伏感知。
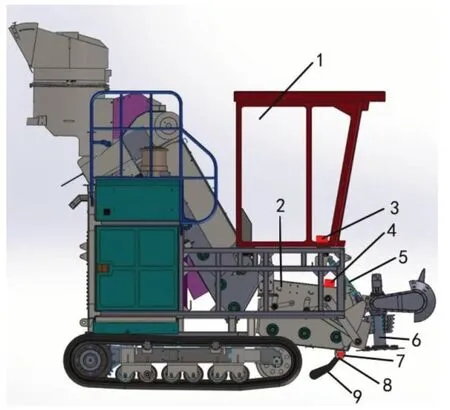
图2 地形传感器安装示意图
拖板的高度作为割刀装置离地面距离的反馈信号,在收割机工作时,根据当前地形设定一个初始目标高度,则可通过计算初始目标高度与实际高度的差值来调控割刀油缸,通过闭环反馈控制保持割刀与地面的距离不变,实现割刀装置的高度自适应控制。
2 刀具高度自适应仿真
通过构建的多源感知方法可有效感知地形高度起伏,为实现割刀高度的快速调整,避免收割过程中刀具升降频繁而破坏宿根的问题,对割刀机构的控制进行仿真分析[9-10]。
2.1 模型构建
将甘蔗收割机割刀部分的SolidWorks 模型导入Automation Studio 仿真软件,并对各部件进行约束设定,如表1 所示。由于仿真中并未考虑车体移动情况,因此车架设置为固定约束。

表1 子模型之间的约束
收割机的割刀位于切割机构的最底端,通过电液比例阀实现高度调节。仿真中仅对割刀升降机构进行分析,液压系统主要包括液压泵、电液比例换向阀、平衡阀以及液压油缸等。电液比例换向阀开口大小由PWM(Pulse Width Modulation)占空比的大小控制,将一定量的液压油泵入油缸,以驱动活塞升降移动。参照实际样机,仿真中液压系统的相关参数如表2所示。
切割高度控制是依靠地形起伏对地形传感器的反作用力产生转角而建立的调节关系,以形成闭环的反馈来工作的。采用ST 语言编程,以信号发生器的形式关联地形传感器角度,并加入PID 控制模块,为样机的PID参数寻优提供参考。
在Automation Studio 仿真软件中先后加载液压元件、电气接口元件、3D 结构件(添加运动副)和编程文档(IEC-ST 语言)等,并设定运动关联和运动参数,搭建的仿真模型如图3所示。

图3 切割机构高度控制仿真模型
2.2 割刀高度控制仿真结果
在仿真环境中,使用最小二乘法和单一变量调整的方法找到最优的kp、ki和kd,为控制策略中PID 参数寻优提供参考。为验证该参数对系统稳定的作用,给系统一个阶跃信号,系统超调量和响应时间如图4所示。

图4 阶跃信号控制结果
控制器给出阶跃信号,在活塞伸出过程中,油缸经过0.17 s 后完成全行程收缩,在活塞收缩过程中全行程238 mm,历时0.2 s,整个收缩和伸出过程超调量几乎为0,响应时间迅速,充分证明了割刀高度自适应控制系统的稳定性。
对切割机构的上升和下降两个动作进行仿真,观察提升油缸系统启动瞬间至稳态的鲁棒性、响应时间和油缸行程,仿真时间为6 s,切割机构升降仿真控制结果如图5所示。
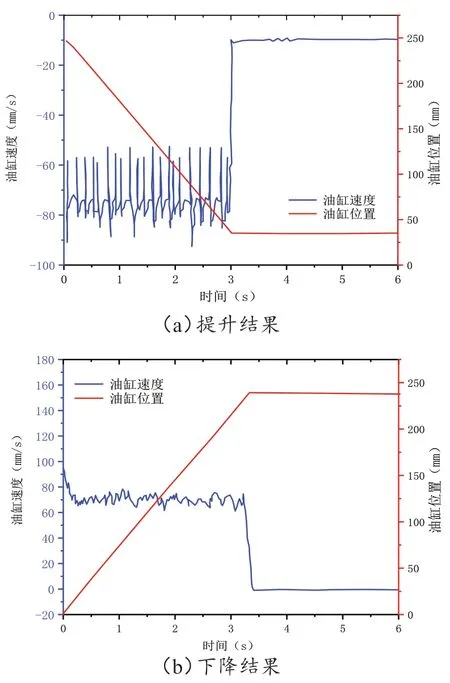
图5 切割机构升降控制结果
在提升过程中,油缸历时3 s 完成全行程收缩,行程为211 mm,由于提升过程中受到切割结构重力的影响,速度整体波动较为剧烈,但仍收敛于70 mm/s。在下降过程中,全行程238 mm,历时3.3 s,由于在回油路加入平衡阀,可以明显看出,油缸的下降速度波动起伏比起提升过程平稳性提升了65%,速度收敛于70 mm/s,与收缩时的速度基本一致。整个过程中油缸提升和下降的行程接近,而且并未超过油缸的最大行程285 mm。
切割机构是双缸并联的形式,电液控制中需要考虑双缸同步的问题,防止因缸运动的不同步导致扭矩不同,造成机器的损坏。如图6 所示,分别给出了两个油缸伸出到30%、60%、90%时的位置对比,以及两个油缸收缩到70%、50%时的位置对比。

图6 双缸同步性仿真结果
从图6 中可以明显看出,两个油缸的位置始终保持同步,保证了切割机构的正常运行。
3 结论
1)设计了一种接触式地形高度检测传感器,提出了以接触拖板、割刀转动角度和收割机车身姿态为反馈的地形感知方法和系统,为甘蔗收割机的地形感知提供了理论方法。
2)在Automation Studio 软件中建立了切割机构高度自适应的机电液联合仿真系统,该结果为控制策略中PID 参数寻优提供了参考。本研究证实了刀具高度自适应方法的可行性,为后续收割样机确定了有效的割刀高度调整算法和参数,从而为甘蔗收割机刀具高度自适应控制系统的设计提供了一种方法。
