基于机器学习的5G 低流量覆盖区域无线网络精准规划选址研究
2023-08-22邓敏茜卢洁珍
丁 瑜,邓敏茜,卢洁珍
(1.南宁职业技术学院,广西 南宁 530008;2.广西建设职业技术学院,广西 南宁 530007)
0 引 言
5G 移动通信网络的大范围建设及商用,对低流量覆盖区域无线网络精准规划选址提出了更高的要求。为了更好地适应5G建设需求,向6G的发展平稳过渡,有必要对5G 移动通信网络规划方法进行探讨,科学合理地应用通信最新技术。同时,这将为6G 移动通信网络规划打下坚实基础。
1 5G 低流量覆盖区域特点
5G 系统自身频率的特点,决定了5G 系统电磁波覆盖范围小、穿透力差、传输损耗大。而低流量覆盖区域往往分布在人口不集中的城市边缘、乡镇及农村等区域。5G 无线网络站址规划需要同时兼顾覆盖、容量、质量的需求,能否精准规划选址发挥着关键作用。
1.1 5G 低流量覆盖区域类型及特点
5G 低流量覆盖区域主要包括城边郊区、乡镇、农村区域以及道路。城边郊区的特点是以居民楼和小型商超为主,整体建筑布局比较松散,高层建筑比较少,单位面积上的客户密度不大,但是覆盖、容量、质量等方面较难平衡。乡镇的特点与被切割后的城边郊区类似。农村区域主要由行政村和自然村组成,多为低矮建筑,并且呈现分散型分布,范围较广,很难形成数据热点,覆盖问题成为该类场景重点考虑的因素。受到地形因素的干扰,规划、建设移动通信网络后,往往由于山体遮挡等留下网络黑点[1]。道路专指铁路(含高速铁路)、高速公路、国道、省道,其余道路由其他覆盖场景所涵盖[2]。
1.2 5G 低流量覆盖区域规划难度大
目前,5G 低流量覆盖区域拟建站址规划普遍停留在凭借一线规划人员的主观经验,在电子地图上完成初步选点,再进行现场勘察确认。这种站址规划方法不仅无法保证选址位置最优,而且要消耗大量的人力、物力资源,规划周期较长。
2 方案设计
基于上述,文章提出多层感知器神经网络和遗传算法组合的机器学习方法,来完成5G 低流量覆盖区域无线网络精准规划选址。多层感知器神经网络算法具有很好的容错功能,但是整体优化能力不足,收敛速度相对遗传算法慢[3]。遗传算法具有整体系统优化的功能,但是在局部优化方面比较滞后[4]。采用2 种控制算法相组合的方案来进行选址研究,既可以发挥多层感知器神经网络局部寻优的优点来确定单站址规划数据,又可以利用遗传算法整体优化的功能去除冗余站址数据。5G 低流量覆盖区域单站覆盖范围需要最大化,在保障有效覆盖范围的同时节约资源。用多层感知器神经网络完成初步站址规划,以保证单站规划数据的局部最优有效性,然后在此基础上加上一定冗余度防止多层感知器神经网络过度拟合,再采用遗传算法对5G 低流量覆盖区域进行二次规划,在确保整体最优的同时剔除不必要的冗余站址,从而解决5G 低流量覆盖区域精准覆盖的问题。
2.1 根据5G 低流量覆盖区域场景类型确定传播损耗模型
相较于4G 而言,5G 传播损耗模型3GPP TR 38.901考虑了人体遮挡损耗、树木损耗、雨雪衰耗等因素对整体传播路径损耗的影响,使其在模型预测评估上更加准确[5]。该传播损耗模型的简化工程经验公式为
式中:PL为路径损耗,dB;PB为基站发射功率,dBm;ZB为基站天线增益,dBi;UE为天线增益,dB;N1为子载波数;PK为基站馈线损耗,dB;PC为穿透损耗,dB;PZ为植被损耗,dB;PR为人体损耗,dB;PY为预留干扰余量,dB;PYX为雨/冰雪余量,dB;PS为慢衰落余量,dB;PRZ为热噪声功率,dBm;KE为噪声系数,dB;SINR为解调门限,dB。
该传播损耗模型经验公式要根据具体的场景,结合各自的应用频段特点来灵活运用,将5G 低流量覆盖区域场景与该模型相匹配,可以有效评估单站覆盖半径。
2.2 采用多层感知器神经网络进行规划选址
2.2.1 确定多层感知器神经网络模型
本方案采用多层感知器前馈神经网络,由输入层、隐层(隐藏层)以及输出层组成,本层网络各神经网元互不相连,各相邻层的神经网元可以互连,如图1所示[6]。
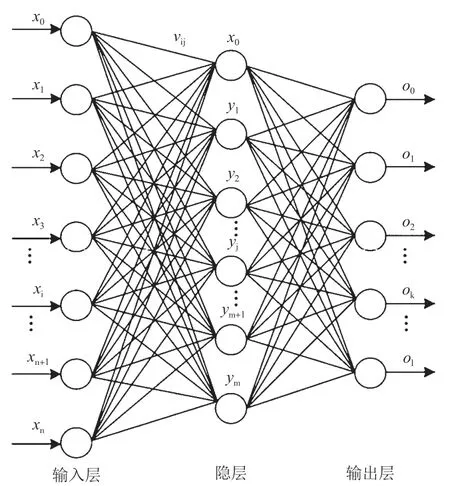
图1 多层感知器前馈神经网络的结构
图1中,xi表示输入层第i个网络神经元的输入值,yi表示隐层第j个神经元的输出值,ok表示输出层第k个神经元的输出值,vij表示输入层第i个神经元到隐层第j个神经元的对应权重值,wjk表示隐层第j个神经元到输出层第k个神经元的对应权重值。
2.2.2 确定训练多层感知器神经网络的输入层和隐藏层数据
多层感知器神经网络在使用之前必须对其进行训练,训练数据的有效性对于输出结果有重要影响。优先采用5G 类似场景数据进行训练,可以缩短训练时间。输入层基站数据包括基站工参数据、日常运行数据等。如果没有5G 类似场景数据用来参考,根据多层感知器神经网络训练拟合经验,在加权的基础上,采用2G、3G、4G 现网数据作为输入层数据来对多层感知器神经网络进行训练。隐藏层的节点个数的确定可以依据经验数据来确定,然后结合仿真软件对其调整。
2.2.3 完成多层感知器神经网络训练
多层感知器神经网络训练本质就是输出层数据的误差纠偏过程。当多层感知器神经网络模型的输出层数据与期望值不符时,将通过反向传播算法来计算隐藏节点的误差,逐步传输给输入层,来完成整个多层感知器神经网络模型各权重值的调整,直到输出层数据与期望值误差在可接受范围内。
2.3 采用遗传算法对5G 低流量覆盖区域规划进行优化
遗传算法的本质是自适应优化算法的迭代,借助计算机对类生物系统进行模拟研究,将大自然界遗传和优胜劣汰的运行机制应用于复杂系统的优化。遗传优化算法可以有效通过多次的运算结果统计或只通过一个度量函数梯度,就可以完成对自然界中生物遗传和优胜劣汰进化过程的模拟,进而搜索到最优解序列。本方案采用遗传算法进行已有规划数据的优化,其二次规划方法如图2 所示。
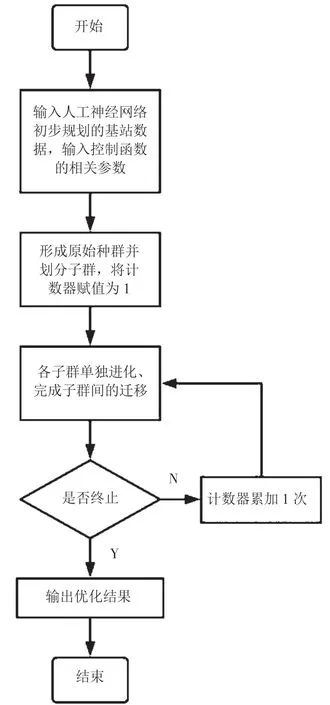
图2 遗传算法的二次规划方法
为了避免多层感知器神经网络可能带来的实际偏差,使遗传算法规划更加有效,设计中将多层感知器神经网络所完成的规划数据进行冗余处理。在规划站址60 m 圆周边界的东、西、南、北4 个方向上,对称增加4 个基站,天线方向角等其他工参数据不变。以新增加的基站数据作为冗余数据,用来规避过拟合等原因可能带来的局部最优数据的丢失。将冗余数据和多层感知器神经网络的初始输出数据作为初步规划数据输入给遗传算法系统。传播损耗模型依然采用式(1)计算。通过有效覆盖范围目标、通信质量目标等限制条件来设计控制函数。在5G 低流量覆盖区域,用最少的基站解决最大的覆盖范围问题,是本研究规划工作的重点。该区域基站投放的精准度决定了规划基站的数量。采用遗传算法进行二次规划时,可以通过不断调整重要参数(个体染色体的长度)进行试验而得到最优基站的数量,只要确定了满足控制函数要求的最短染色体长度,就可以推算出最优规划的最少基站数量。在控制函数和判别条件的约束下,遗传算法系统最终输出的基站站址规划数据作为组合机器学习系统的站址规划输出结果。
3 规划案例分析
采用MATLAB/simulink 搭建基于机器学习的5G低流量覆盖区域无线网络规划平台,如图3 所示。

图3 MATLAB/simulink 规划平台结构
采用A 省某运营商低流量区域1 000 个5G 基站、3 000 个4G 基站和5 000 个2G 基站的现网数据,作为多层感知器神经网络输入层的源数据。源数据同时具备离散变量和随机变量的特点,由2 部分组成:一部分是基站工参数据,主要包括站址经纬度、天线方向角、天线覆盖方向、天线挂高等;另一部分是现网运行数据,主要包括5G 客户数量、5G 区域日均流量、信号与干扰加噪声比(Signal to Interference plus Noise Ratio,SINR)、4G 网络驻留时长、2G 高倒流时长、测量报告(Measurement Report,MR)弱覆盖比例以及边界接收信号码功率(Received Signal Code Power,RSRP)等。激活函数采用对数型S 激活函数,隐藏层数量为9。将多层感知器神经网络的基站规划数据信息设置冗余量后,作为遗传算法的基础数据。以5G 网络的覆盖范围、覆盖深度、单站流量等目标构建遗传算法的控制目标函数以及遗传算法二次规划模块。遗传算法二次规划后的输出结果作为拟规划站址数据。
采用B 省某运营商低流量区域现网数据作为校验对比样本,与通过组合机器学习的5G 低流量覆盖区域无线网络精准规划输出的站址信息相比。选取以20 m 为半径的圆周范围作为站址隔离误差圆周,在不考虑建设条件等其他因素的条件下,本方案在低流量覆盖区域能够以较少的基站数量满足现网的覆盖、容量、质量等相关要求,有效站址契合度达到95%,并且明显节约3 个站点的建设成本。仿真模拟规划校验对比结果如图4 所示。模拟规划站址与现网站址的差异见圆圈标注。这3 个基站附近都有5G 基站对其覆盖范围进行合理覆盖,并且周围建筑低矮、松散,非流量热点区域。结果表明,采用基于机器学习的5G 低流量覆盖区域无线网络精准规划选址方法可以有效规避这3 个不合理站址。
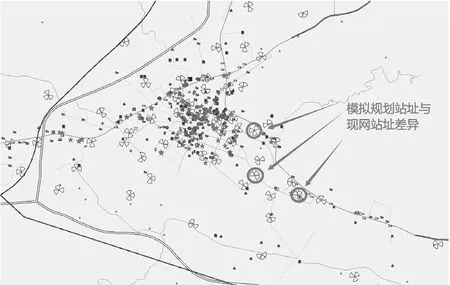
图4 本文选址方法与现网选址校验对比结果
4 结 论
采用多层感知器神经网络和遗传算法组合的机器学习方案,结合5G 现网运行数据,对低流量覆盖区域无线网络精准规划选址,对比传统规划方法,本文所用算法更加先进,数据分析、筛选更加全面,自主完成学习改进、优化。借助MATLAB/Simulink 建模、处理数据的准确性更高,输出结果更客观,有效缩短规划选址工作的时间周期。在保障现网运行指标的前提下,节约了站址资源,能够有效指导5G 低流量区域的工程实践,为无线网络精准规划提供一种新思路。
未来重点是研究人工神经网络和遗传算法相融合的无线网络精准规划方法。在一次规划数据的处理过程中,融合2 种算法的优点。以时分复用模式为参考基础,采用自适应控制的反步法切割时间间隙[7],人工神经网络和遗传算法轮流进入工作模式,进一步提高算法工作效率。
