基于北斗航摄的智能识别巡库及实时监测技术研究
2023-08-21朱德康高麒杰刘姜旭
朱德康,高麒杰,刘姜旭
(国网新源集团有限公司富春江水力发电厂,浙江 桐庐 311504)
目前,我国水库大坝的数量与日俱增,但是大坝在投入使用的过程中会产生各种各样的安全隐患,不仅仅是功能故障问题,极有可能会威胁到下游人民的生命财产安全,因此对水库进行日常维护及实时监测十分必要。但大坝的规模和体型较大,在日常的监测过程中需要投入较多的人力、物力,成本费用较高,准确性较低,监测效率不甚理想[1]。利用北斗系统进行安全监测具有大范围、无接触、高精度和连续监测等优点,具有广泛应用前景。
1 研究背景与意义
2020 年长江中下游地区降雨量创历史新高,钱塘江流域遭遇特大洪水。得益于及时主动的防汛准备和积极有效的应对策略,富春江水电站成功战胜建坝52 年以来最大洪水,连续开闸576 h,创建坝以来最长泄洪记录。在此等极端天气影响下,水电站全部机组满发运行,水电站水库和水工建筑物均经受了严峻的考验,也对水电站的安全检查和管理提出了更高的要求。
按照《国家电网公司防汛管理办法(试行)》《国网新源控股有限公司应急预案管理手册》的相关规定和要求,富春江水电站每年汛前都将对整个上库流域及库区进行安全检查,主要是针对人为或者自然因素威胁水电站人员及重要设施安全及正常生产工作的因素,包括堤岸受损、废船脱出或者出现乱排、乱堆、乱占、乱采和乱建,以及沿岸边坡滑坡等情况。但目前主要是以人工、高频次的现场巡查方式进行巡检,库区岸坡检查以目测为主,这种方式不利于对水工建筑运行安全的监控,更不利于发挥巡视检查的作用。第一,富春江电站库区地形环境复杂、植被茂密、水工建筑物分布范围大、工程边坡和河道情况复杂,人员作业危险性大、费时耗力;第二,人员现场巡视存在“盲区”,无法到达一些高陡边坡地段、危险地段,难以对巡检区域进行多角度完整覆兽;第三,进入汛期降雨情况较多,路面湿滑,水位普遍高,本身作业风险增高,人员难以在野外完成完整的巡检检查,难以及时发现问题并采取针对性的整改和治理措施[2]。
2 国内外研究现状
我国现已成功地开发和应用以北斗卫星导航定位系统为基础,联合GLONASS、GPS、GALILEO 等多种卫星导航定位系统,极大程度上提高并保证定位终端设备的定位准确性和稳定性,并且在无人机飞行作业和变形自动监测过程中已经经过了实际项目的验证,针对地基沉降、公路铁路边坡、尾矿库坡面和大坝等都有部分实现了变形监测系统的部署和应用。
近几年无人机及其衍生技术发展非常迅猛,无人机技术在电力行业中就已发挥出较大功用,在电站电网建设阶段可用于地形初勘和选址,在运维阶段可用于电力走廊巡线等,通过无人机搭载激光雷达、航拍镜头、高光谱等传感器进行高效的数据采集,并通过专业软件进行数据处理和分析,能满足更多环节的应用需求。
在水电领域,龙羊峡水电站已使用无人机倾斜摄影技术获取边坡表面区域全覆兽影像,复原近坝库岸滑坡体的几何形态,达到监测边坡表面位移变化及变形目的。白鹤滩水电站也已通过试点项目进行了相关研究与验证。意大利艾米利亚罗马涅的里德拉科利大坝于2017 年使用无人机航空摄影技术,结合GPS 定位技术、激光扫描技术和传统测绘仪器对坝体进行安全监测与维护,为第一次使用无人机技术将混凝土重力拱坝进行重现的项目,并成功地验证了无人机航测数据的高效性和高精度。无人机技术在河流巡检方面也已有部分研究,但因两岸地形复杂,并未实现大规模的实际应用,目前主要集中于对河道污染情况的巡查,即用于水文检测[3]。
3 项目理论和实践依据
3.1 无人机航测原理
航摄测量是指结合地面控制点测量、调绘、立体测绘等步骤,利用航摄仪器在飞机上连续向地面摄取成像片,进行地形图绘制的作业。简单来说,就是在飞机上装摄像机进行拍照,获取影像数据,然后进行绘图处理。根据需要可以选择垂直拍摄,生成正射影像图,也就是平面的;选择倾斜拍摄,生成的就是3D 影像图,如图1 所示。
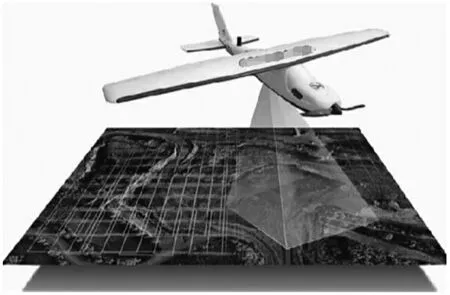
图1 航空摄影测量原理图
无人机航测技术是一种新型的测绘应用技术,其融合了无人机驾驶技术、航测传感技术、远程遥控技术、通信技术和GPS 差分定位技术和应用技术。针对不同的应用需求,无人机可搭载不同的传感设备,针对性地完成目标数据采集任务,这为水电站及库区安全巡检提供了新的思路和有利条件。其具有如下优势。
1)使用灵活。在无人机实际工作的过程中,要想对不同面积进行巡检,可以通过调整飞行高度来解决,在测区范围较大的时候,可以同时进行多架多次巡检,使用起来相当灵活。
2)高分辨率、处理速度快。搭载在无人机上的照相设备图像分辨率可达0.1~0.5m,明显高于目前国内外卫星图像资料;资料收集和处理的速度较快,具有较高的效率。
3)成本低、集成性强。无人机的高空摄像,不仅可以进行航空影像的拍摄,还可以进行卫星摄像,同时具备高性能自动化处理技术,可有效节约成本,数据采集和处理速度较快。
4)安全高效。将无人机用于水库河道巡检,能够解决地理环境复杂、检查工作量大、检查人员安全隐患不明等问题。同时,无人机一次巡检可以代替几十个巡检人员的工作时间,节省了时间,提高了效率。
5)环境依赖小。无人机巡检受自然气候、地形条件等的限制小,保证了实施的可能性,对环境的依赖小。
3.2 北斗位移监测原理
北斗位移监测是目前应用最广泛的监测技术,其测量原理为静态相对定位。设置在基线两端点的接收机相对于周围的参照物固定不动,通过连续观测获得充分的多余观测数据,解算基线向量,称为静态相对定位,一般采用测相伪距观测值作为基本观测量,是当前定位中精度最高的一种方法。
4 实施方案
4.1 富春江水电站库区无人机航摄自动化巡库技术的研究
1)技术路线。航测成图采用“内-外-内”的作业模式。内业利用前期航飞数据进行空中三角测量,进行立体测图,即室内预判。将内业立测数据符号化,叠加调绘影像、地名数据输出调绘片。外业利用调绘片进行实地调绘、补调及补测。内业参照外业调绘资料,在CASS 10.1+AutoCAD 2019 软件中对立测数据进行分层、分要素的数据整合、图面相互关系处理,制图编辑可以得到DLG 制图数据(*.DWG)。利用在创建三维立体模型时生成的las 点云数据,通过TerraSolid 软件进行点云自动化分类,提取正确的地面点,将地面点进行网格化,并内插成一定间距的数字高程模型(DEM)。利用DEM、原始单片和空三成果数据纠正单片,并对单片进行匀色,通过影像镶嵌和编辑拼接线得到最终的数字正射影像(DOM)数据[4]。
2)航空摄影。本次计划采用无人机自主巡库系统进行飞行作业,如图2 所示。根据水电站区域的实际地形地貌进行航飞设计,选择较好的航飞天气航摄,获取数码影像,资料处理,资料检查,对航飞质量较差区域及漏飞区域重飞或补飞。航飞时,将严格布设航摄分区,并选择合适的地面采样距离。根据所选择的地面采样距离,利用相机的焦距和像元尺寸,得到相对航高。相对高度与基准面之和,即为飞机飞行的高度。
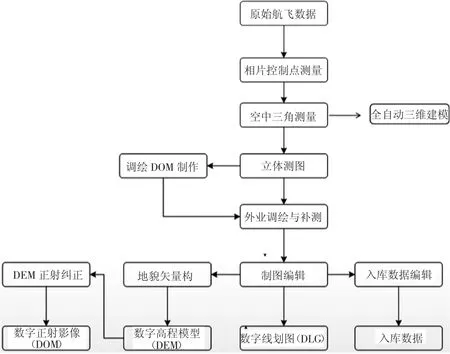
图2 自动巡库技术流程图
3)航线规划。执行《低空数字航空摄影规范》,利用水电站区域已有的地形图、遥感影像等信息,分析了航摄分区内形状与空间分布特征,基于无人机搭载北斗高精度定位传感系统,进行高精度的航线敷设。在航线敷设阶段,尽量考虑常规巡检作业的高效性,遵循以少量架次以及集中点位覆兽全部区域的原则,同时考虑不同的巡检对象以及巡检要求,设定不同的飞行参数,通过多次试飞来优选确定自动巡检的航线及参数[5]。
4)航摄飞行。在无人机飞行前,做好设备检查工作,确保设备能够正常稳定运行,包括无人机设备、GPS 系统、存储设备和航摄系统等。如果航摄出现相对漏洞和绝对漏洞均应及时补摄,应采用前一次航摄飞行的数码相机补摄,补摄航线的两端应超出漏洞之外2 条基线。
飞行结束后,从飞行系统中下载相关的POS 数据、基站数据以及姿态数据,然后用专门的软件进行处理计算,取得飞行测量各点的高精度的定位数据。
5)质量检查。影像概况检查,主要是检查原始影像是否存在不能打开或存储时影像损坏的情况;其次检查影像是否有发虚现象;第三检查全部影像的曝光情况,是否影响影像的判读。
6)影像处理。航片的扫描质量直接影响到正射图像的生成质量,在扫描时如果数字图像间隔过大,分辨率较低,就会出现图像模糊的现象;如果间隔太小,影像虽然变得清晰,但是资料量会非常庞大,后期的加工工作变得极其不方便。因此,要综合各方面因素,选择合适的间隔,这样才能使扫描后的数码影像符合智能识别算法对数据的要求。
7)空中三角测量。首先,在影像的四角手动均匀选取同名点,然后与影像进行自动匹配,随后把匹配的粗差点去掉,把符合精度要求的同名点保留。利用空三的结果来镶嵌影像,2 个影像的镶嵌线条都比较平直。利用空三的结果进行影像镶嵌,再手工对镶嵌线进行调整拼接,整个图幅色调就能保持均匀、平面误差可以符合精度要求。
8)生成数字高程模型生成。在得到点云数据后,确认包含了所有的地物。可以通过TerraSolid 软件进行自动滤波分类,将点云数据大致地分为地面点、噪点、植被和建筑物等,不符合正确率的部分可以采取人机交互编辑的方式进行分类,并以实时获取的影像作为参考,将不正确的分类通过人工干预的方式得到正确的地面点。得到正确的地面点后,将地面点网格化,通过内插的方式生成合适间距的DEM。
9)制作正射影像。通过SOUTH UAV2.0 和pixel 4d 软件,利用影像内外方位元素、空三结果、DEM 对原始影像进行数字微分纠正,生成数字正射影像成果。
10)自动化巡库扩展应用。无人机航摄自动化巡库系统可搭载高清图传设备将现场实时图像传输至应急指挥中心大屏展示,进行远程调度指挥;同时可搭载空中喊话器,进行远距离喊话,警示存在危险行为的人员。
4.2 基于图像识别技术的隐患智能分析及风险管理系统研究
基于图像智能识别技术,研究一套图像智能识别系统,主要针对富春江水电站库区巡检要求和规范,对全局影像进行针对性的检查,包括对库区设施、库区流域及其沿岸环境设施以及河道违规占用河道资源情况的检查。实现可见光照片人工缺陷标记功能和隐患点AI 识别功能、建立隐患样本库。把无人机现场采集的影像回传之后,系统可自动进行隐患分析,导出巡检记录和隐患情况的风险排查情况,生成可视化巡检报告,对重要隐患区域和点位形成周期性监测和管理,预判性规避可能发生的风险,提高常规检查的高效性和分析成果的科学性。
4.3 基于北斗高精度的山体坡面位移实时安全监测预警系统的应用研究
边坡监测预警系统由前端数据采集子系统、数据传输子系统(数据通信)、数据处理分析与管理子系统(控制中心)及辅助子系统4 个子系统组成。4 个子系统形成有机整体,前端数据采集子系统负责对GNSS卫星及各类监测传感器进行跟踪并实时采集数据,数据由数据通信网传送到控制中心,控制中心软件对数据进行处理分析,对边坡位移情况进行实时监测,一旦监测到数据异常,预警系统立即作出相应预警响应。
项目通过现场调研试点隐患坡面,结合项目现场情况,在合适点位布设基准点与监测点,完成监测墩基建施工、GNSS 接收机安装调试、软件平台部署和设备上线运行。通过整套基于北斗的山体坡面位移实时安全监测预警系统的建设,实现对边坡状态全天候数字化显示。同时,结合数据处理与变形分析技术,实现点线面立体监测;基于对监测数据的实时传输和智能分析,时刻掌握变形的演化趋势,实现提前预警;对边坡状态进行长期的稳定性评价和预测,为保障富春江水电站人员设施安全提供长期稳定的保障。
5 结束语
北斗卫星系统精度高,功能多,可以实现全天候监测。随着北斗系统的不断发展、完善,在水电站的智能巡库及实时监测方面的应用也在加快推进,在实际监测业务中具有很高的技术成效,利用北斗航摄实现智能巡库及实时监测势必会成为未来发展的趋势。