自动上料取纸系统协同作业分析
2023-08-21胡国栋
胡国栋
中航华东光电(上海)有限公司 上海 201100
0 引言
随着我国经济与科技的不断发展,自动化技术日新月异,机械手在各行各业的应用也逐渐扩大,与此同时,单个机械手使用的局限性也随之扩大,无法满足工业生产的技术要求。在很多场合,多个机械手配合或机械手与自动化设备协同运作的情况越来越多,其应用极大地提高了工作效率[1,2]。本文主要对机械手与自动化设备的协同运作进行分析,对其实际生产进行更深入的研究。
目前,许多学者针对多机协同作业问题提出了许多的方法。曹如月等[3]采用全局与局部相结合的方法,通过对比分析任务序列规划问题和旅行商问题,结合蚁群算法,建立了多机协同作业任务分配模型以及农机作业的任务序列规划模型;张兴国等[4]通过寻找系统联盟中能够以最小代价执行任务的一个或多个机器人来求解多机器人系统任务;徐意[5]提出了适用于变位机基坐标系标定的关节轴线法和适用于机器人基坐标系标定的三点“握手”法以获取协同系统模型中主从运动单元相对位置关系并推导出了主从协同正逆变换公式,设计协同运动插补算法和同步运动插补算法来实现协同运动控制。
本文基于主从控制设计了上料取纸新系统,首先对取纸设备进行运动学分析,并根据上料机械手的可达空间,分析设备与机械手的碰撞可能从而分析取纸设备可达的空间,再根据机械手与设备的相对空间运动,工件上待作业轨迹点的位置,结合设备作业姿态,进行机械手与取纸设备的协同分析。
1 系统建模
自动上料取纸系统是适用于玻璃切割的生产线,此设备利用机械手爪将玻璃原料搬运至切割台上进行切割。
1)自动取纸机 包括3 个组成部件:压纸取纸部件、抬升部件以及移送部件。图1 为自动取纸机示意图。
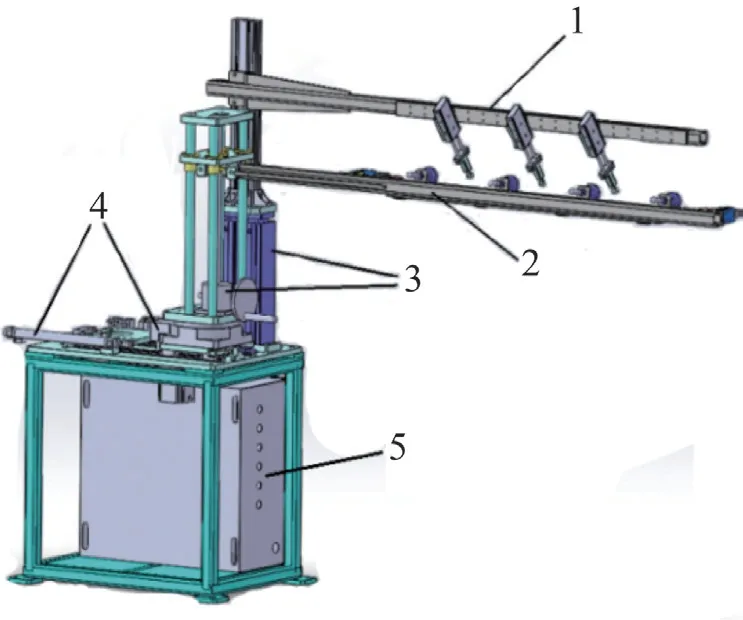
图1 自动取纸设备示意图
2)设计的上料机械手末端执行器为机械手抓取并搬运玻璃的部件,由真空吸盘与铝型材组成。图2 为机械手执行器示意图。

图2 机械手执行器示意图
3)自动玻璃推进机 主要包括底座、移动架板、直线导轨、丝杠副、伺服电动机。图3 为自动推进机示意图。
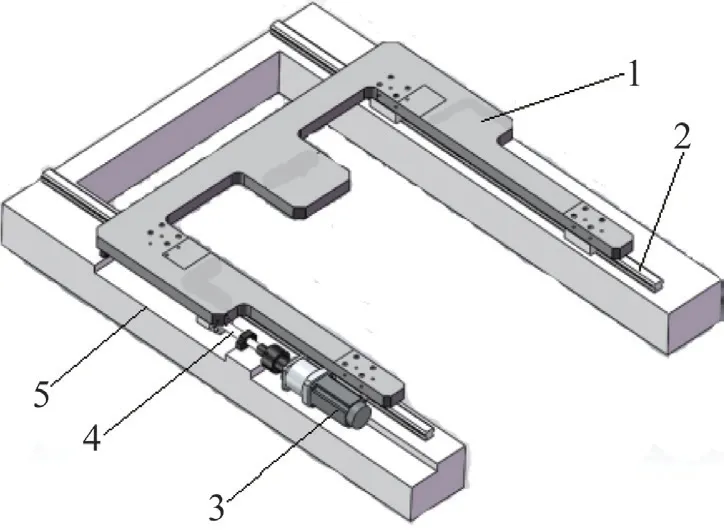
图3 自动玻璃推进机示意图
自动化生产线能够高效运作的前提是机械手能够自如地上下料。三维模型如图4 所示,为典型的六自由度机械臂。
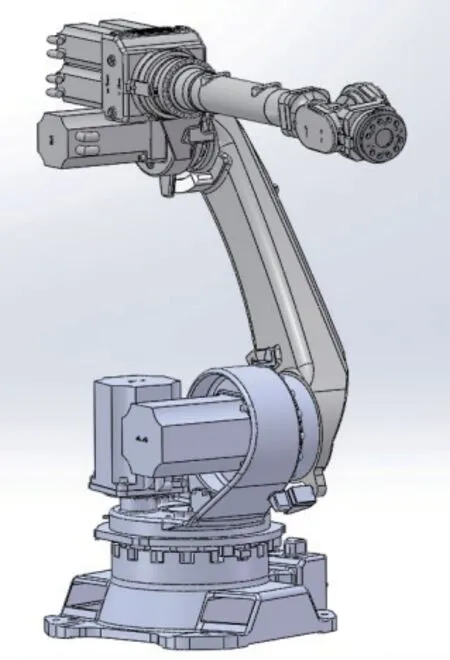
图4 ER50A-C10 工业机械手三维模型
上料取纸系统工序为:自动推进机将玻璃原料推进至取纸位置→上料机械手将玻璃搬运安全点→取纸设备运行至取纸位→取纸机通过吸盘将纸吸住并移送至盛纸架上→机械手将玻璃运送至切割台。按照生产流程要求以及厂房的空间及布局,考虑占地面积、结构的紧凑,以及加快生产节拍、减少干涉,整体的布局如图5 所示。
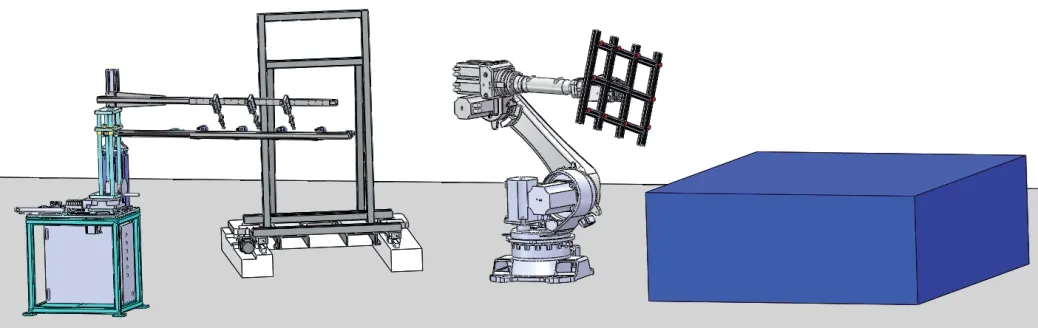
图5 整体布局三维示意图
2 系统协同运动分析
2.1 设备运动分析
自动取纸设备为自主设计的机构,首先需要对取纸设备进行分析。
取纸设备可看作一个二自由度的机械手,图6 为简化图连杆坐标系。其中,O0为机械手基坐标系,将2台设备基坐标联系起来,构建出运动链,以自标定法为基础[6]进行协同分析。对取纸设备进行运动学分析[7]。

图6 自动取纸机简化图连杆坐标系
由坐标系可知A10、A21,需要求得结果为
式中:T32为2 轴坐标系相对于机械手基坐标的中的位姿矩阵。
将1 轴坐标系以O为中心转动θ角,所得的坐标系与原坐标系的位姿关系矩阵为
则可得:T10=A10Aθ1;同理可得:T21=A20Aθ22。
另外,已知取纸设备2 坐标轴之间的杆长L,故可知
最后求T32,将2 台设备的坐标系相关联起来,其极坐标系重合,坐标系x、y相同,z轴相反,在不考虑工件的情况下,可得T32=(A21)-1。
即得到取纸设备的正运动学公式为
其中
2.2 上料机械手轨迹设定
系统需在最优工作空间内完成运行,通过取值设备的运动将运行轨迹移动至最佳空间以提高作业效率。通过设备的运动将运行轨迹移至可达空间内。根据机械手运作空间及取纸设备尺寸,对机械手的上料轨迹进行设定[8-10]。对机械手的轨迹进行预判。如图7 所示。
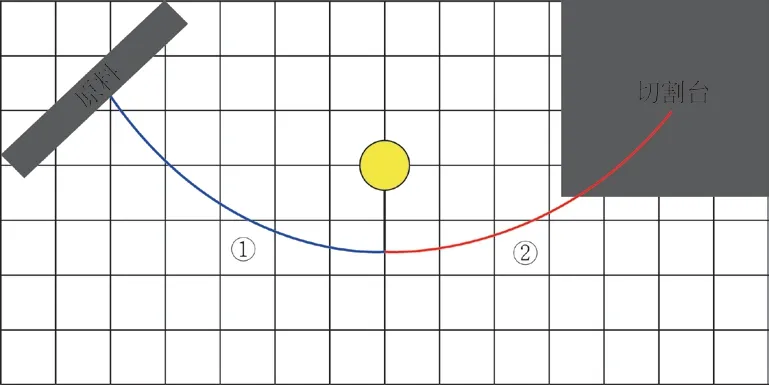
图7 机械手轨迹预判图
根据厂家的生产要求及系统整体的布局,并结合时间最短、位移最短、规避奇异点以及方干涉等问题进行机械手路径规划[11]。以机械手底座中心为原点,将设备看作一个质点,确定其坐标系,如图8 所示。
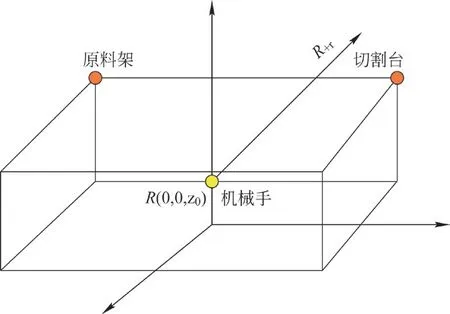
图8 设备于三维空间中坐标
以R为圆心,R+r作为半径画出一个圆,且确保设备在机械手的最大工作范围内,机械手的最大工作空间的半径R及物料中心到机械手末端法兰面中心的距离r满足
再精确地规划出轨迹,计算出轨迹点的坐标,如图9 所示。
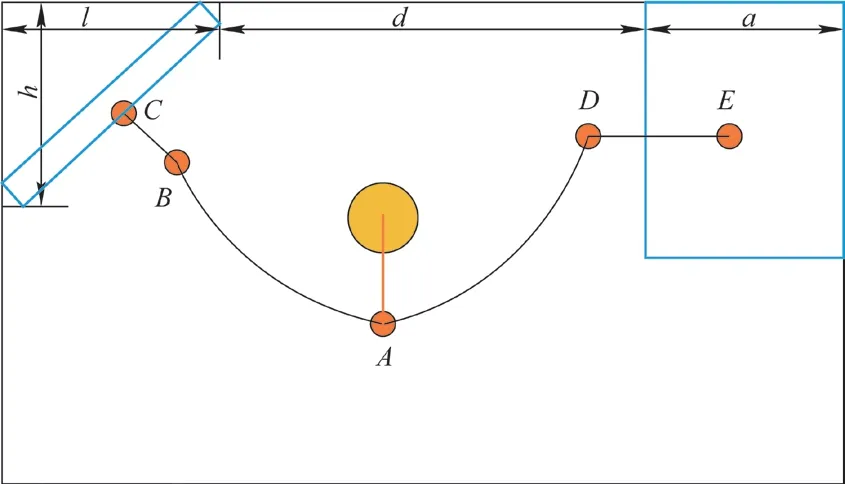
图9 机械手轨迹规划图
初始位置A(xA,yA,zA),原料架的中心点坐标C(xC,yC,zC),得出坐标B和C的关系为
同理,可得出轨迹点B和D之间的关系为
为了进行最优轨迹的选择,需对每条预设的轨迹进行选择。如图10 所示,模拟出机械手点A到点D之间的轨迹,将三维轨迹图转化为二维,如图9 中显示了3条通过干涉区域的轨迹,其中轨迹①是单是以直线来通过区域,轨迹②则是以是弧线至D'处,轨迹③则以更大的曲率半径来运行。弧lad2和lad3为半径不同的圆弧,柔性明显高于lad1,而lad3半径大于lad2,故前者比后者更能避开干涉区域,lad1在轨迹中增设G点和H点,使机械手在中间区域以直线通过,更为安全,同时A'与G、D'与H之间为弧线,机械手在运行过程中只需调整2 弧线的平滑度,故不会将机械手的轨迹柔性降低。增设轨迹点会使机械手运行时间变长,综合考虑,最终机械手选择轨迹lad1。

图10 2 点之间轨迹
2.3 协同运动规划
为能够对机械手和取纸设备的协调运动进行分析,建立了图11 所示的运动链。

图11 机械手和上料取纸机的运动链
在取纸过程中,纸张的位置会不断发生变化,须保证取纸设备末端总随着纸张位置运动。可根据笛卡尔空间坐标的齐次性对其进行描述,具体运动矩阵方程表示为
式中:为机械手末端坐标系相对于机械手基坐标系的变化矩阵,为取纸工具坐标系相对于机械手末端坐标系的变化矩阵,Pend为取纸工具的末端在取纸工具坐标系中的位置矢量,为取纸机工作台坐标系相对于机械手基坐标系的变化矩阵,Pweld为纸张在取纸机工作台坐标系中的位置矢量。
由此,机械手和取纸设备之间的协调运动问题即可转化为空间坐标变化的问题。采用笛卡尔坐标法的方法建立机械手与取纸机协调研究的变换关系。
对于取纸机的某一个轴(这里假设为第一个轴),按照上述方法所得点的位置矢量分别为P1=[x1,y1,z1]T、P2=[x2,y2,z2]T、P3=[x3,y3,z3]T,则P1、P2、P3这3个点的位置矢量都是在机械手基坐标系{0→XYZ}下得到的,且它们都是通过点P绕同一轴旋转而得到的,由P1、P2、P33 点可以确定一平面L,其方程为
爱国主义始终是中华民族团结统一、自强不息的精神源泉。弘扬爱国主义精神,是实现中国梦的内在要求,是赢得具有许多新的历史特点的伟大斗争的现实要求,是应对经济全球化时代各种挑战的必然要求,不仅如此,还有助于维护世界和平发展、构建人类命运共同体。
由此,可得到过P1P2中点且与P1P2垂直的平面M的方程为
由此,可得到过P2P3中点且与P2P3垂直的平面N的方程,即
联立L、M、N这3 个平面方程即可得到这3 个点所确定圆弧的圆心坐标O1=[x0,y0,z0]T,然后以O1为原点,以O1P1为X1轴,以平面L的法向量为Z1轴建立第一轴的坐标系{O1→X1Y1Z1}。
此时通过坐标系的每一个方向轴在基坐标系{O1→X1Y1Z1}的表示和O1点的坐标可以得到坐标系{O1→X1Y1Z1}到基坐标系{O1→X1Y1Z1}的变换矩阵T1,首先由平面L的方程可以得到平面L的法向量方向为
以L法向量方向作为新坐标系的Z1轴方向,Z1轴的方向余弦为
以O1P1方向作为新坐标系X1轴方向,X1轴的方向余弦为
新的坐标系Y1轴的方向余弦为Z1轴的方向余弦与X1轴的方向余弦乘积。
从而得到变化矩阵T1为
以此类推,得到其余旋转轴的变化矩阵T2,T3,…,Tn。通过所求得的变化矩阵即可以求出它们之间的变化矩阵。
上述所建立的坐标系中,取纸机的每一个旋转轴均为Z轴,可以得到取纸机的运动学正解矩阵为
其中
3 运动仿真及实验验证
在解决自动上料取纸系统的协同作业的模型问题后,需对其准确性进行仿真验。如图12、图13 所示。

图12 上料机械手各关节位移
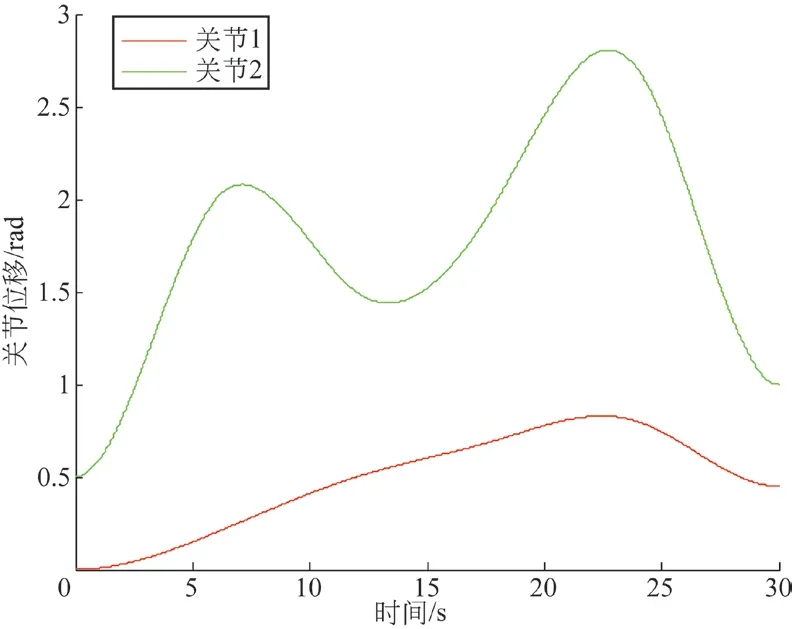
图13 取纸设备各关节位移
为了验证自动上料取纸系统的协同作业的可使用性,搭建了上料取纸系统的实验平台并进行调试,机械手的运动轨迹点通过示教的方式进行控制,并且记录起始点定位置。自动上料取纸系统及机械手取纸位置如图14 所示。

图14 自动上料取纸系统
当上料机械手运行完成这段上料轨迹之后,起始取料以及最终上料时的位置如图15、图16 所示。

图15 系统取料位置

图16 系统上料最终位置
最后对每一道工序的时间进行记录,结果如表1所示。表1 结果显示,现场实际工作节拍为69.47 s/件,且每道工序实际所需时间与优化仿真所得时间相差不大,在合理的误差范围内,证明了前面仿真的可靠性。且生产节拍满足生产需要,所设计的设备具有实用价值。

表1 各工序时间 s
4 结论
1)根据自动上料取纸系统的具体参数、现场环境及工作要求,以自动上料取纸生产线为对象进行了设计,确定了系统最终方案及布局。
2)建立了取纸设备运动学模型,设定了机械手上料轨迹,对机械手与取纸设备的协同作业进行深入分析并建立数学关系,更好地分析了系统上料与取纸的配合作业方法。
3)对建立的系统同作业模型进行了运动仿真,搭建了自动上料取纸系统的实验平台,实际测量各道工序的时间以及每件物料的生产节拍。结果证明所设计的系统满足生产全需求。
