基于STM32 的仿向日葵太阳能发电板系统设计
2023-08-16梁灿强陈泽伟陈家熙林育龙李依潼
梁灿强,陈泽伟,陈家熙,林育龙,李依潼
(广东海洋大学,广东 湛江 524088)
0 引言
随着社会的发展,人们对能源类资源的依赖日益增加,而石化能源的消耗带来了严重的环境和气候变化问题[1]。 清洁可再生能源的利用为解决这道难题提供了答案[2],太阳能作为清洁能源,近年来倍受青睐。 我国太阳能资源丰富,能满足人们对能源的迫切需求,太阳能发电也成为我国一项重要的能量来源。国外的单轴太阳跟踪器发电板能实现东西方向的自动跟踪,南北方向则需要通过手动调节。 国内常用的追踪发电板为光电跟踪装置,利用光电检测传感器采集光电信息,通过比较微电流偏差来使跟踪器追踪太阳[3],但由于太阳光属于泛光,加上天气等影响因素,会导致系统不稳定等情况存在。 目前,国内外的追踪发电板多为视日运动轨迹跟踪和光电跟踪,两者均存在不理想的状况。
为了解决上述问题,本文设计了仿向日葵太阳能发电板,以提高太阳能发电板的发电效率。
1 太阳能发电板的系统总体设计
1.1 系统组成
系统为模拟追踪光源系统,根据向日葵的生长特性,模拟向日葵追踪太阳光的原理设计,太阳能发电板能像向日葵一样,时刻追踪太阳,以最佳角度朝向太阳,实现太阳能发电的效率提升。
系统采用STM32 单片机为主控芯片,负责信息的获取以及转换处理、PWM 波的输出、电机驱动的控制等。 各模块相互协调组成仿向日葵太阳能发电板系统,其中,GPS 模块主要负责定位、当地时间日期的获取等;显示屏模块负责处理后信息的显示;舵机平台由两个自由度为180°的模拟舵机组成,负责光伏太阳能发电板的移动;清洁模块由为太阳能发电板特制的清洁毛刷、减速电机以及供水模块构成。
1.2 功能设计
首先,系统通过GPS 模块实现定位后,通过串口向主控芯片每秒发送一帧数据,主控芯片提供数据解析得到的当地经度、纬度、UTC 时间及UTC 日期等数据;其次,主控芯片通过算法分析,结合地理计算公式,计算出太阳高度角和当地日出日落等数据,同时在TFT 屏幕显示这些数据;最后,通过主控芯片舵机平台输出特定的PWM 波,舵机平台决定太阳能发电板的转向,实现对太阳光的跟踪,从而提高发电板的发电效率。 清洁模块作为太阳能发电板的附加功能,可以根据当地的灰尘积累程度来设定发电板的清洁时间间隔,若遇上灰尘较大的情况,可以使用主控电路板上的手动按钮进行手动清洁发电板,进一步提高发电板的发电效率。 主要功能流程如图1 所示。
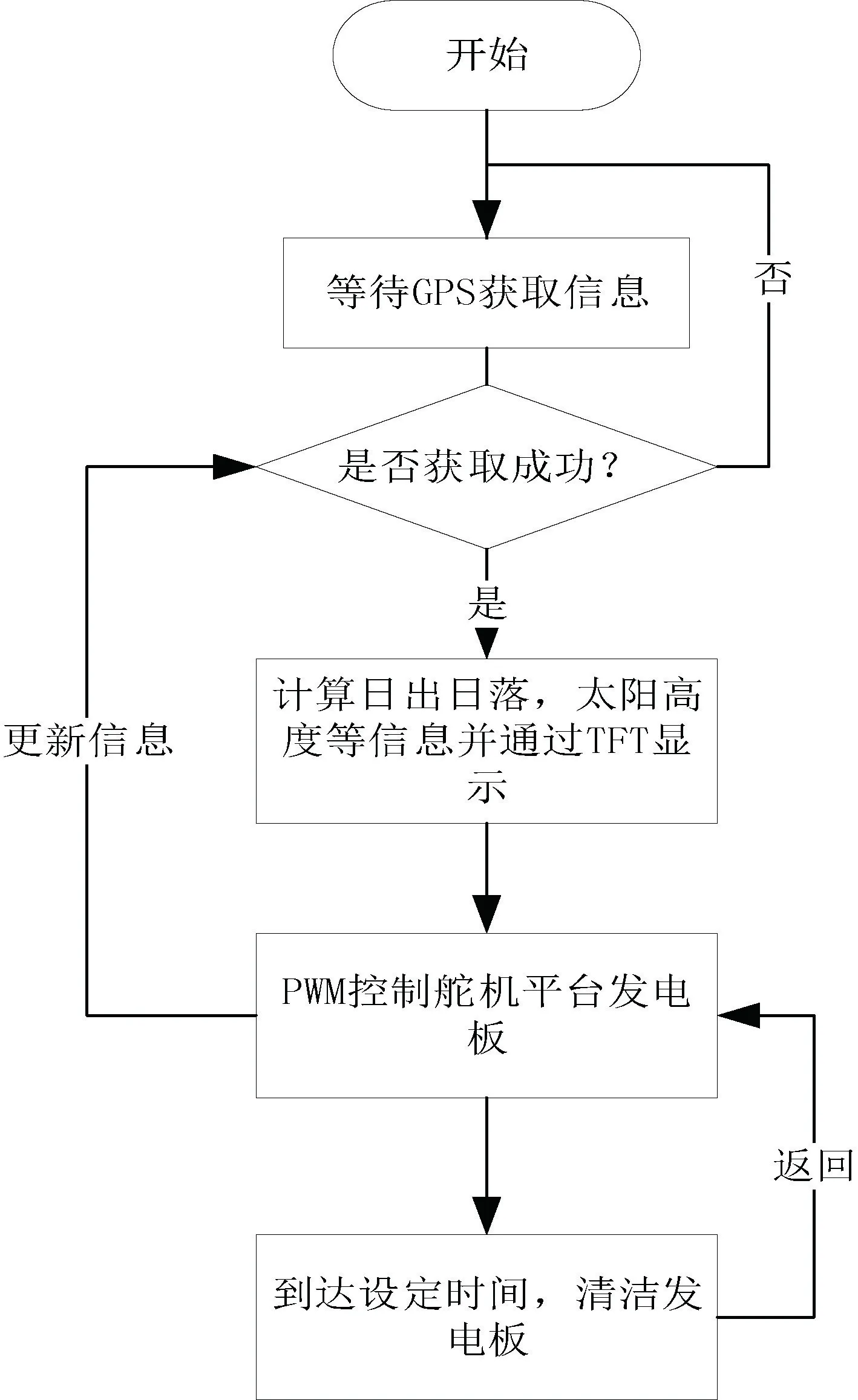
图1 主要功能流程
2 算法分析
2.1 GPS 定位
示例发电板使用的GPS 模块为WTGPS+BD 单双模定位模块,可以同时接收6 个系统的GNSS 信号,实现联合定位、导航和受时。 使用GPS 定位后,GPS 模块将会回去一帧数据,其中包含多种基本数据:
$GPRMC 推荐定位信息;
$GPVTG 地面速度信息;
$GPGGA 全球定位信息;
$GPGSA 当前卫星信息;
$GPGSV 可见卫星信息;
$GPGLL 地理位置信息。
其中,$GPRMC 信息为:
$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>∗hh
其中,<1>UTC 时间,<3>纬度,<4>南北纬,<5>经度,<6>东西经,<9>UTC 日期,其余略。
该信息符合获取要求,主控芯片将对其进行提取解析。
在获取GPS 定位信息后,通过$GPRMC 解析得到当地的经度、纬度、UTC 时间及UTC 日期等数据,经过换算可得到太阳能发电板所处的实际地理位置及当地时间。
2.2 太阳高度角
太阳高度角是指地球某一时间内太阳平行光线照射到地平线上的夹角[4],用太阳高度角作为发电板的仰角,实现发电板以最佳角度朝向太阳。 在得到太阳高度角前,需要获得太阳赤纬角、太阳时角等信息。
根据太阳光照射方向与赤道面的夹角,得到太阳赤纬角δ=23.45×sin((N-80)/370.0×360)。 其中23.45 为黄赤交角(23°27’),N 为从元旦开始算的天数。 地球分为24 时区,每隔15°相差1 h,与经线对应后,得到时角Ω=15×(t-12),其中t 为当地区时。
综上,可得太阳高度角:sinH=cosΩ×cosδ×cosφ+sinδ×sinφ。 其中,H 为太阳高度角,Ω 为太阳时角,δ为太阳赤纬角,φ 为当地纬度。
2.3 日出日落
根据晨昏线对纬平面切割比例来得到当地地区的白天时长,使用UTC 时间计算当地的正午时间(即当地12 点),用正午时间来平分白天时长,便可得到当地大致的日出时间及日落时间。
根据地球的黄赤夹角与处于某一纬度的纬平面及地球自转轴之间的几何关系,可以得到该纬度所处的白天时长,主要过程为先求出所处平面的黑夜时长的切割比例:ψ=2arccos(R×sinφ×tanδ)/(r×cosφ)。其中,ψ 为黑夜切割的角度,δ 为太阳赤纬角,φ 为当地纬度,R 为地球半径,r 为所处纬平面的半径。
之后,求出当地白天时长T:T = (1-ψ/360)×24。
综上,可得出日出时间:12-T/2;日落时间:12+T/2。
3 硬件实现
示例发电板系统的硬件部分由舵机平台、控制面板(由主控芯片、GPS 模块、TFT 显示屏及电机驱动构成)、太阳能板和清洁模块构成的一体化面板3 大板块组成。
3.1 舵机平台的动作设计
舵机平台有两个自由度,转动范围为0°~180°,通过算法分析出太阳高度角和日出日落,利用这两个数据确定舵机的转动方向。 其中,日出日落确定一级舵机的转向范围,太阳高度角决定二级舵机的仰角。
一级舵机用角度90°作为当地正午的基准,以180°作为日出的方向,以0°为日落的方向。 一天中太阳的日照时间不超过12 h(不考虑地球极圈),可知太阳的日出日落时间在0°~180°变化,在主控芯片得到日出日落后,PWM 驱动一级舵机在这一区间内随当地的时间规律变化。
二级舵机用90°~180°的旋转角度作为发电板在北半球的太阳高度角的朝向;用0°~90°的旋转角度作为发电板在南半球的太阳高度角的朝向;当发电板位于赤道时,固定角度为90°。 太阳高度角在当地正午获得最大值,日出日落为0°(不考虑地球极圈)。由于地球的自转,太阳东升西落得到周日视运动现象,观察太阳周日视运动可以得到一个太阳周日视运动轨迹图[5],即太阳高度角的变化值为日出(0°)—正午(最大值)—日落(0°)的弧度变化。 在主控芯片得到太阳高度角后,PWM 驱动二级舵机在这一区间内随当地的时间规律变化。
一级舵机和二级舵机联合转动,可使发电板像向日葵一样追踪太阳。
3.2 发电板的清洁
清洁模块由蓄水盒、减速电机(作为毛刷驱动)、电动水泵(供水)以及特制毛刷(由软管和清洁棉组成)组成。 粉尘浓度较高是影响光伏消耗的因素,所以太阳能组件清洁系统也应更加智能化[6]。 当发电板系统达到设定的清洁时间或手动清洁时,发电板会转向特定的角度,小水泵向发电板的毛刷间歇性供水,然后使用减速电机驱动清洁毛刷在发电板表面往复运动,最终实现发电板表面的灰尘的清洁处理。
4 功能测试
测试前放置整个发电板时,使用指南针来辅助发电板的方位朝向,确保发电板以正确的方向对准太阳。 以地理位置广东肇庆(23°18’N,111°50’E)进行测试:启动程序,等待GPS 模块获取信息,TFT 屏幕显示处理得到的当地数据,主控芯片确定太阳高度角、日出日落信息,通过PWM 驱动太阳能发电板的朝向,至此,太阳能发电板像向日葵一样随着太阳的周日视运动轨迹进行运动,如图2 所示。 在当地时间的00:00 后,发电板的朝向将转至第二天太阳升起的方向,等待第二天的追踪。
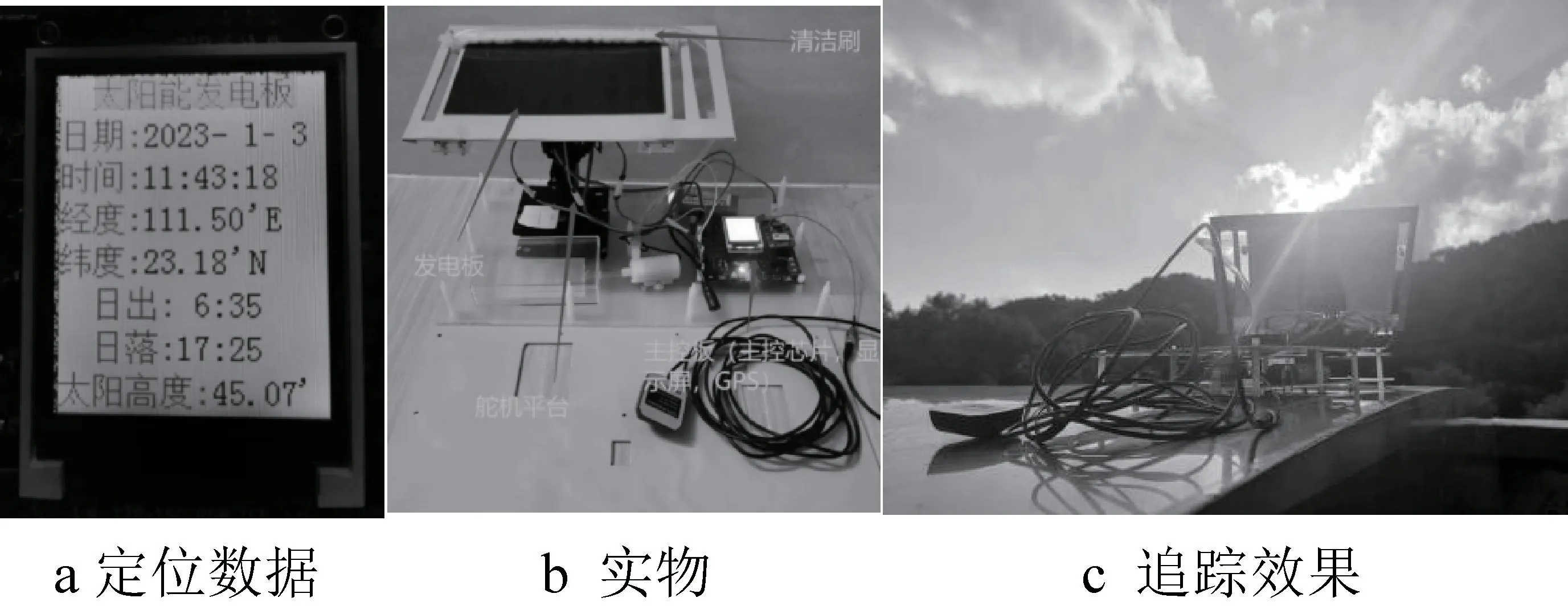
图2 系统的实物测试
经测试,与固定的发电板(面向中午太阳的方向)对比,结合在各时段接负载测试电流与电压换算后,系统发电量能提升15%~20%左右,达到了预期的效果。
5 结语
太阳能板发电系统基于STM32 芯片,联合GPS定位,不需要网络,能自主独立工作,适用地区广。 系统仿照向日葵的追光设计,既能解决固定朝向的太阳能发电板效率不高和半自动的单轴太阳跟踪器发电板的耗费人力的问题,又能解决光电跟踪导致发电板误判的问题,加入的清洁模块更使系统趋向智能化。在太阳能资源丰富的地区使用,能提高太阳能的利用效率,为今后的太阳能资源开发提供了一定的参考意义。
